



A Method for Detecting Feature-Sparse Regions and Matching Enhancement

Abstract
:1. Introduction
2. Principles and Method
2.1. Basic Ideas and Processes
- (1)
- Local features generally correspond to locations where large variations in the grey level occur. However, grey-level variations are small in texture-sparse regions. Consequently, very few local features will be extracted from these regions when globally consistent extraction parameters are used. Therefore, a feature-sparse region detector will be used to selectively magnify and input feature-sparse regions into the feature extraction network, thereby resolving non-uniformities caused by globally consistent texture differentiation.
- (2)
- Since the local features of texture-sparse regions tend to look less distinctive, these features usually have low scores. Therefore, adaptive feature thresholding will be used to preserve local features with relatively high scores in texture-sparse regions. The local features obtained using the feature-sparse region detector and adaptive feature thresholding will be aggregated and passed to SuperGlue. Therefore, SuperGlue will produce robust matching results based on a sufficient quantity of uniformly distributed features. The processes of the SD-ME algorithm are illustrated in Figure 1.
2.2. Local Feature Extraction and Descriptor Learning
2.3. Feature Mapping Using GNN
2.4. Detection of Feature-Sparse Regions
| Algorithm 1. Feature-Sparse Region Detector |
Step 1. Initialize detector:
Step 2. The i-th partitioning:
Step 3. Estimation of the affine transform model:
|
2.5. Adaptive Feature Thresholding
3. Results and Discussion
3.1. Operating Environment and Experimental Data
3.2. Optimization of the Minimum Detection Area, S
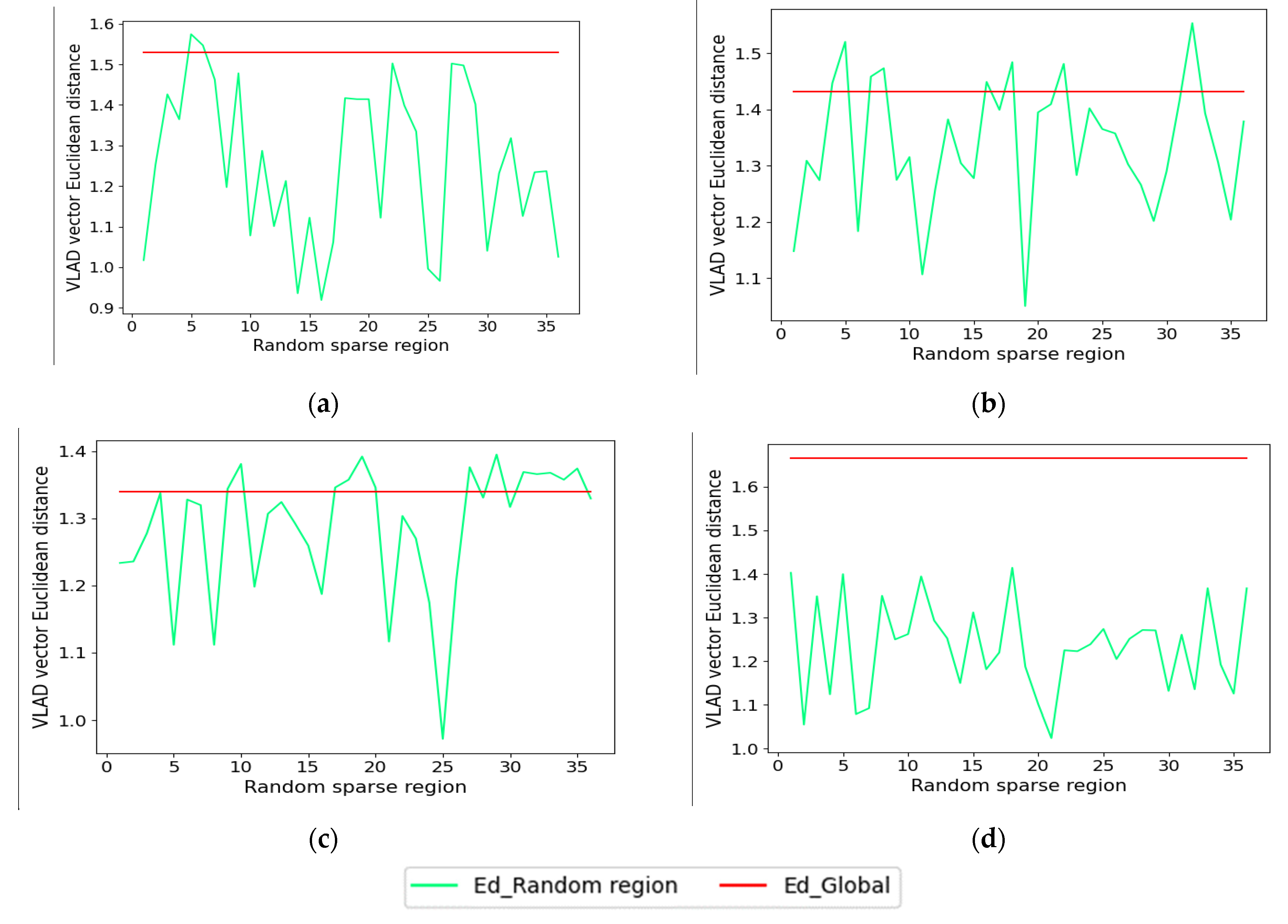
3.3. Detection of Feature-Sparse Regions and Measurement of Similarity
3.4. Matching Experiment and Analysis
| Algorithm 2. Computing Distributional Uniformity of the Matching Points |
| Step 1. Divide the image in 5 directions into 10 regions, as per Figure 11 Step 2. Compute the number of matching points in each region Step 3. Combine the number of matching points in the 10 regions to form the regional statistical distribution vector, V Step 4. Use Equation (10) to calculate the distributional uniformity of the matching points |
4. Conclusion and Discussion
4.1. Conclusions
4.2. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tu, H.; Zhu, Y.; Han, C. RI-LPOH: Rotation-invariant local phase orientation histogram for multi-modal image matching. Remote Sens. 2022, 14, 4228. [Google Scholar] [CrossRef]
- Yan, L.; Fei, L.; Chen, C.; Ye, Z.; Zhu, R. A multi-view dense matching algorithm of high resolution aerial images based on graph network. Acta Geod. Cartogr. Sin. 2016, 45, 1171–1181. [Google Scholar] [CrossRef]
- Zhang, Y.; Wan, Y.; Shi, W.; Zhang, Z.; Li, Y.; Ji, S.; Guo, H.; Li, L. Technical framework and preliminary practices of photogrammetric remote sensing intelligent processing of multi-source satellite images. Acta Geod. Cartogr. Sin. 2021, 50, 1068–1083. [Google Scholar]
- Cui, S.; Xu, M.; Ma, A.; Zhong, Y. Modality-free feature detector and descriptor for multimodal remote sensing image registration. Remote Sens. 2020, 12, 2937. [Google Scholar] [CrossRef]
- Lowe, G. Sift-the scale invariant feature transform. Int. J. 2004, 2, 2. [Google Scholar] [CrossRef]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2004, Washington, DC, USA, 27 June–2 July 2004. [Google Scholar]
- Morel, J.M.; Yu, G. ASIFT: A new framework for fully affine invariant image comparison. SIAM J. Imaging Sci. 2009, 2, 438–469. [Google Scholar] [CrossRef] [Green Version]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International conference on computer vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar] [CrossRef]
- Yang, J.B.; Fan, D.Z.; Yang, X.B.; Ji, S.; Lei, R. Deep learning based on image matching method for oblique photogrammetry. J. Geo-Inf. Sci. 2021, 23, 1823–1837. [Google Scholar] [CrossRef]
- Yao, Y.X.; Zhang, Y.J.; Wan, Y.; Liu, X.; Guo, H. Heterologous images matching considering anisotropic weighted moment and absolute phase orientation. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 1727–1736. [Google Scholar] [CrossRef]
- Yu, Q.; Ni, D.; Jiang, Y.; Yan, Y.; An, J.; Sun, T. Universal SAR and optical image registration via a novel SIFT framework based on nonlinear diffusion and a polar spatial-frequency descriptor. ISPRS J. Photogramm. Remote Sens. 2021, 171, 1–17. [Google Scholar] [CrossRef]
- LI, J.; Hu, Q.; AI, M. RIFT: Multi-modal image matching based on radiation-variation insensitive feature transform. IEEE Trans. Image Process. 2020, 29, 3296–3310. [Google Scholar] [CrossRef]
- Yan, L.; Wang, Z.Q.; Ye, Z.Y. Multimodal image registration algorithm considering grayscale and gradient information. Acta Geod. Cartogr. Sin. 2018, 47, 71–81. [Google Scholar] [CrossRef]
- Dusmanu, M.; Rocco, I.; Pajdla, T.; Pollefeys, M.; Sivic, J.; Torii, A.; Sattler, T. D2-net: A trainable CNN for joint description and detection of local features. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual Event, 15–20 June 2019; IEEE: New York, NY, USA. [Google Scholar] [CrossRef]
- Efe, U.; Ince, K.G.; Alatan, A. Dfm: A performance baseline for deep feature matching. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual Event, 19–25 June 2019; IEEE: New York, NY, USA. [Google Scholar] [CrossRef]
- Noh, H.; Araujo, A.; Sim, J.; Weyand, T.; Han, B. Large-scale image retrieval with attentive deep local features. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; IEEE: New York, NY, USA; pp. 3456–3465. [Google Scholar] [CrossRef]
- Lan, C.Z.; Lu, W.J.; Yu, J.M.; Xu, Q. Deep learning algorithm for feature matching of cross modality remote sensing images. Acta Geod. Cartogr. Sin. 2021, 50, 189–202. [Google Scholar] [CrossRef]
- DeTone, D.; Malisiewicz, T.; Rabinovich, A. Superpoint: Self-supervised interest point detection and description. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; IEEE: New York, NY, USA; pp. 224–236. [Google Scholar] [CrossRef]
- Sarlin, P.E.; DeTone, D.; Malisiewicz, T.; Rabinovich, A. Superglue: Learning feature matching with graph neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Online, 16–18 June 2020; IEEE: New York, NY, USA; pp. 4938–4947. [Google Scholar] [CrossRef]
- Sun, J.; Shen, Z.; Wang, Y.; Bao, H.; Zhou, X. LoFTR: Detector-free local feature matching with transformers. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Montreal, QC, Canada, 11–18 October 2021; pp. 8922–8931. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014. [Google Scholar] [CrossRef]
- Shelhamer, E.; Long, J.; Darrell, T. Fully convolutional networks for semantic segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 640–651. [Google Scholar] [CrossRef] [PubMed]
- Alkhatib, W.; Rensing, C.; Silberbauer, J. Multi-label text classification using semantic features and dimensionality reduction with autoencoders. In Proceedings of the International Conference on Language, Data and Knowledge, Nicosia, Cyprus, 27–29 September 2017; Springer: Cham, Germany, 2017; pp. 380–394. [Google Scholar] [CrossRef]
- Shi, W.; Caballero, J.; Huszár, F.; Totz, J.; Aitken, A.P.; Bishop, R.; Rueckert, D.; Wang, Z. Real-time single image and video super-resolution using an efficient sub-pixel convolutional neural network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016, Las Vegas, NV, USA, 27–30 June 2016; pp. 1874–1883. [Google Scholar] [CrossRef] [Green Version]
- Mao, W.D.; Wang, M.J.; Zhou, J.; Gong, M. Minglun Gong Semi-dense Stereo Matching using Dual CNNs. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Waikoloa Village, HI, USA, 3–8 January 2019; pp. 1588–1597. [Google Scholar] [CrossRef] [Green Version]
- Cuturi, M. Sinkhorn Distances: Lightspeed Computation of Optimal Transport. Adv. Neural Inf. Process. Syst. 2013, 26, 2292–2300. [Google Scholar] [CrossRef]
- Jégou., H.; Douze., M.; Schmid., C.; Pérez, P. Aggregating local descriptors into a compact image representation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 3304–3311. [Google Scholar] [CrossRef] [Green Version]
- Qin, J.Q.; Lan, C.Z.; Cui, Z.X.; Zhang, Y.X.; Wang, Y. A Reference Satellite Image Retrieval Method for Drone Absolute Positioning; Geomatics and Information Science of Wuhan University: Wuhan, China, 2020. [Google Scholar] [CrossRef]
- Arandjelović, R.; Gronat, P.; Torii, A.; Pajdla, T.; Sivic, J. NetVLAD: CNN architecture for weakly supervised place recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 5297–5307. [Google Scholar] [CrossRef] [Green Version]
- Luo, Z.X.; Shen, T.W.; Zhou, L.; Zhang, J.H.; Yao, Y.; Li, S.W.; Fang, T.; Quan, L. ContextDesc: Local descriptor augmentation with cross-modality context. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 18–24 June 2019; IEEE: New York, NY, USA; pp. 2527–2536. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.F.; Zhao, C.H. An Evaluation Method for the uniformity of image feature point distribution. Daqing Norm. Univ. 2010, 30, 9–12. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Pair | 1 | 2 | 3 | 4 | |
|---|---|---|---|---|---|
| P/correct matching points | SIFT | 14 | 0 | 0 | 16 |
| ContextDesc | 53 | 13 | 36 | 20 | |
| SuperGlue | 877 | 206 | 170 | 281 | |
| SD-ME | 1112 | 455 | 417 | 509 | |
| MA/% | SIFT | 0.29 | 0 | 0 | 0.69 |
| ContextDesc | 1.08 | 0.52 | 1.13 | 0.86 | |
| SuperGlue | 95.32 | 93.21 | 92.39 | 96.80 | |
| SD-ME | 93.21 | 70.76 | 72.15 | 72.61 | |
| t/s | SIFT | 1.4 | 1.38 | 1.36 | 1.41 |
| ContextDesc | 5.81 | 5.26 | 4.99 | 4.95 | |
| SuperGlue | 0.59 | 0.55 | 0.51 | 0.60 | |
| SD-ME | 1.28 | 1.21 | 1.12 | 1.12 | |
| Image Pair | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| SuperGlue | −12.42215 | −11.41827 | −11.19921 | −10.61661 |
| SD-ME | −9.88986 | −6.643 | −7.005 | −7.33263 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Lan, C.; Wu, B.; Gao, T.; Wei, Z.; Yao, F. A Method for Detecting Feature-Sparse Regions and Matching Enhancement. Remote Sens. 2022, 14, 6214. https://doi.org/10.3390/rs14246214
Wang L, Lan C, Wu B, Gao T, Wei Z, Yao F. A Method for Detecting Feature-Sparse Regions and Matching Enhancement. Remote Sensing. 2022; 14(24):6214. https://doi.org/10.3390/rs14246214
Chicago/Turabian StyleWang, Longhao, Chaozhen Lan, Beibei Wu, Tian Gao, Zijun Wei, and Fushan Yao. 2022. "A Method for Detecting Feature-Sparse Regions and Matching Enhancement" Remote Sensing 14, no. 24: 6214. https://doi.org/10.3390/rs14246214