
Inundated Vegetation Mapping Using SAR Data: A Comparison of Polarization Configurations of UAVSAR L-Band and Sentinel C-Band



Abstract
1. Introduction
2. Materials and Methods
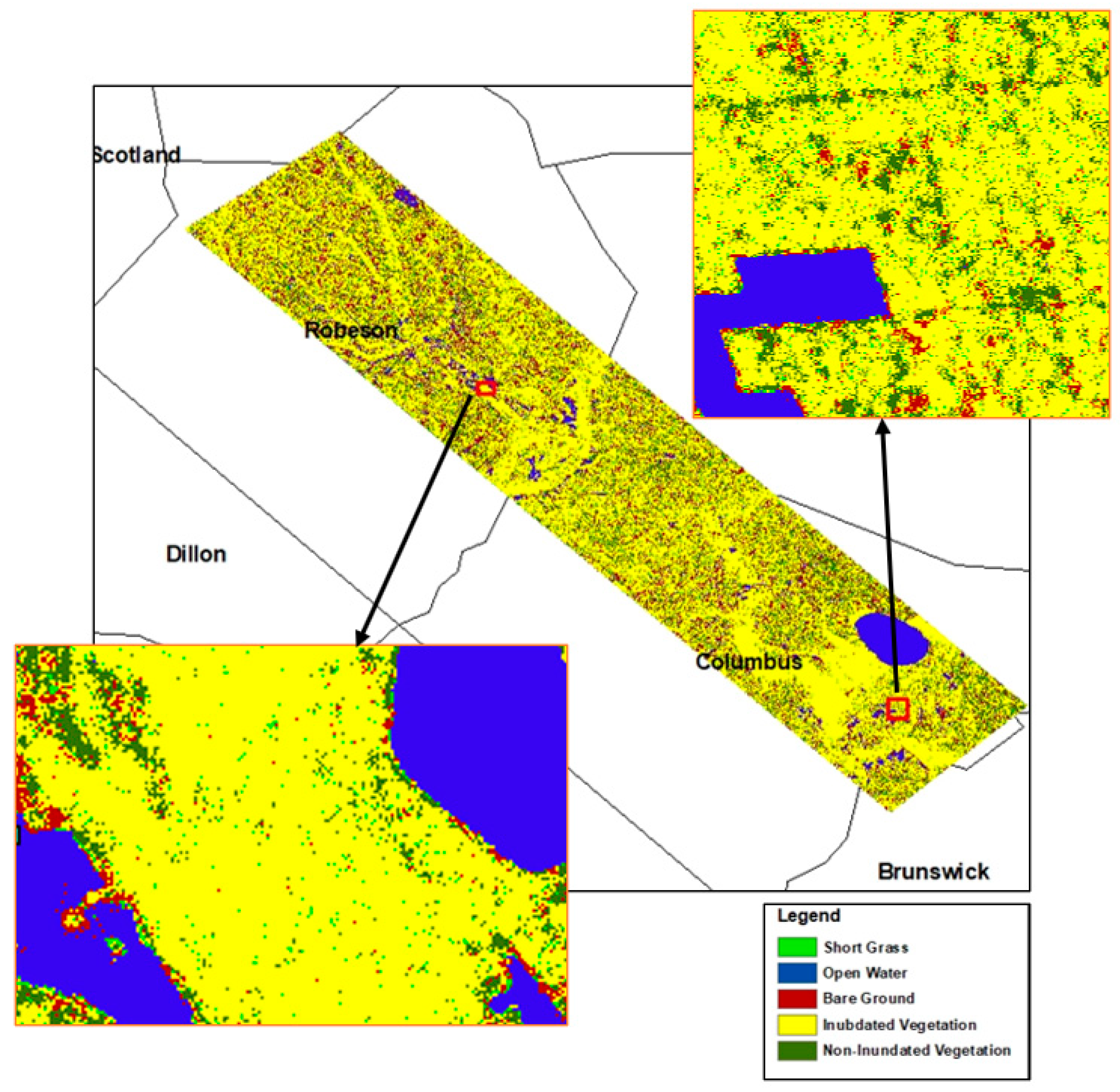
2.1. Study Area and Data
- UAVSAR data: The dataset includes high-resolution SAR data captured over several flight lines with repeated path observations from September 18 to 23 September 2018. UAVSAR is a fully polarized SAR system that collects data using L-band. In this study, we analyzed the ground-range-projected (GRD) format acquired over flight line 31509. These data have a pixel spacing of 6 m by 5 m.
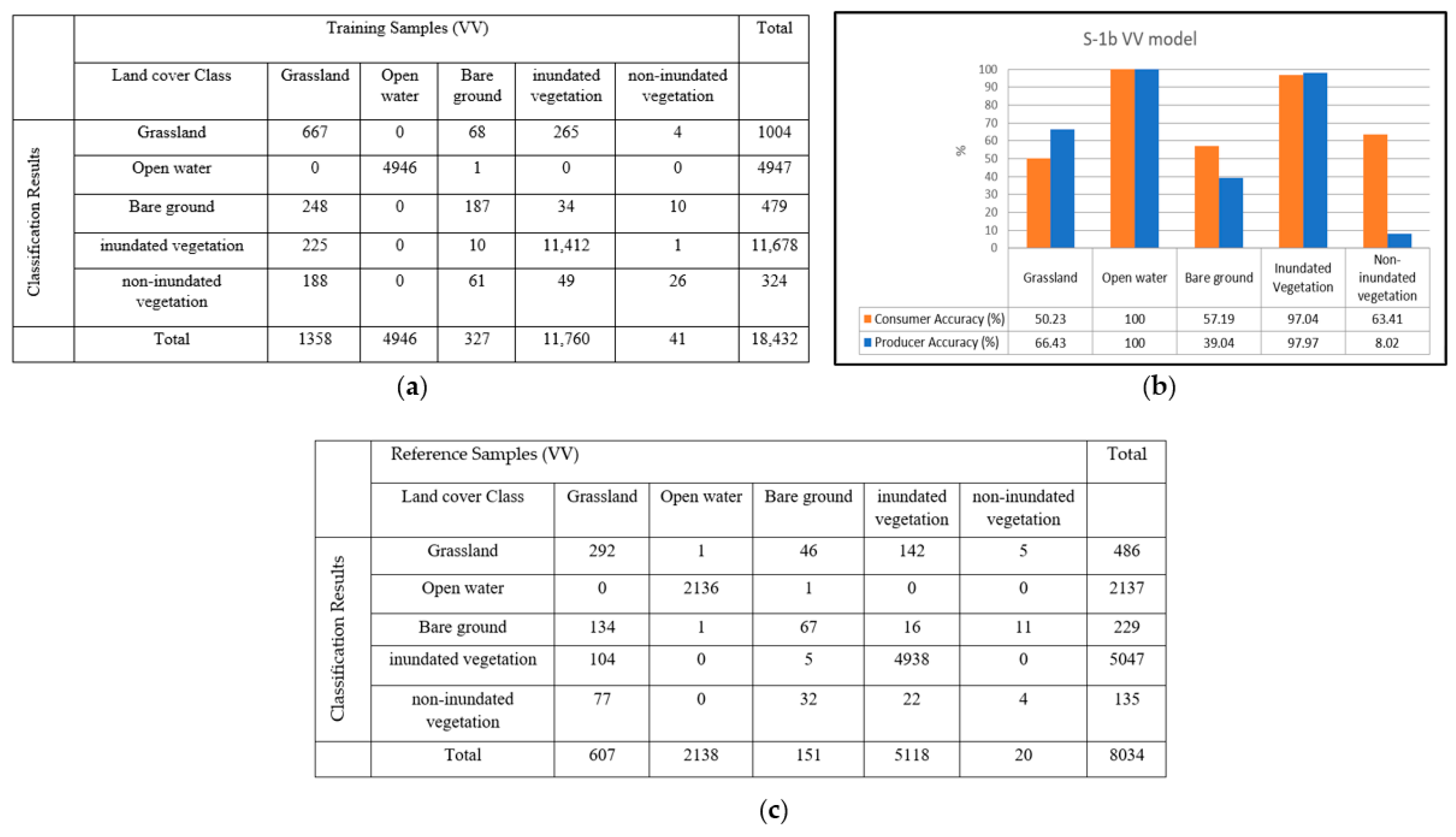
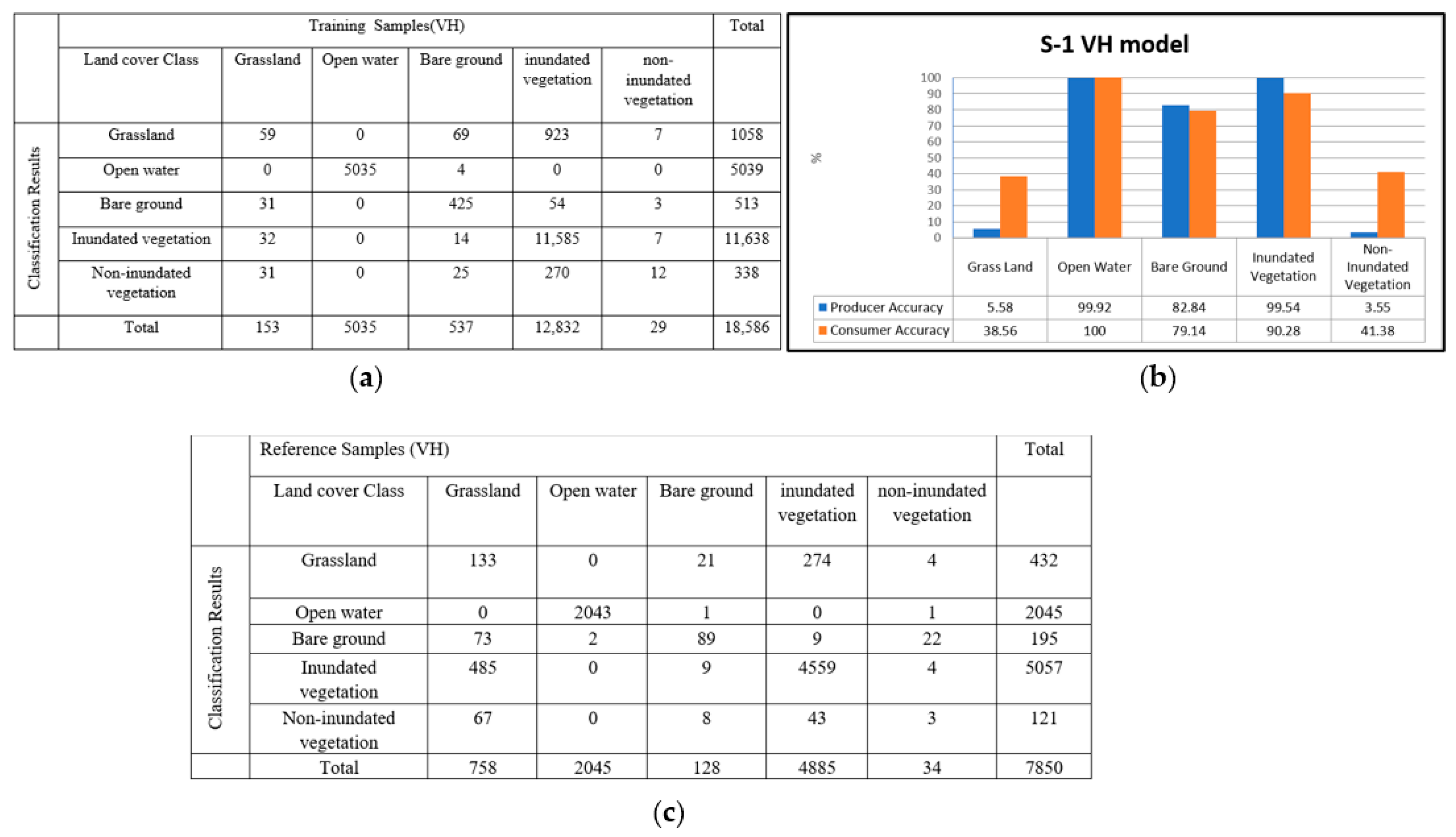
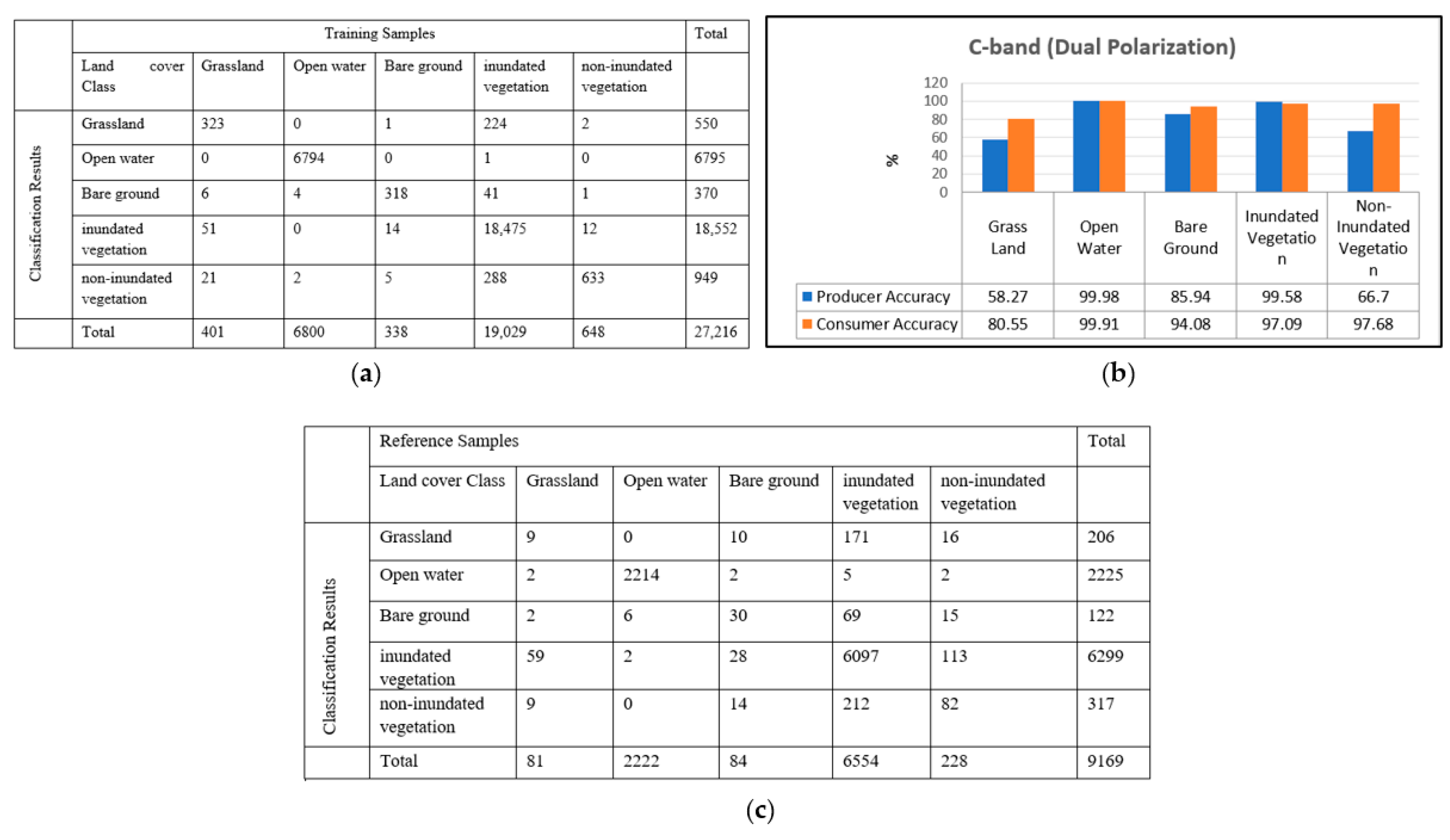
- Sentinel-1b: The Sentinel-1 mission contains two identical satellites: Sentinel-1a and Sentinel-1b. Each satellite provides global coverage with a revisit time of 12 days. By utilizing data from the two satellites, the global coverage temporal resolution can increase to 6 days. Sentinel-1 acquires data over the land surface using the Interferometric Wide-Swath mode with 250-km swath width and 5 × 20-m spatial resolution. Sentinel-1b collects data using dual polarization C-band (5.405 GHz, 5.6 cm wavelength), i.e., VV (vertical sent–vertical received) and VH (vertical sent–horizontal received). This research used Sentinel-1b SAR level 1 acquired on 19 September 2018 from path 77 using VV and VH polarizations.
- Auxiliary data: Permanent surface water data were downloaded from the U.S. Fish and Wildlife Services National Wetland Inventory. These data were used to separate permanent open water from temporarily flooded open water and to identify permanently inundated vegetation from temporarily inundated vegetation. In addition, the research used UAV optical data to generate training and validation samples by visually identifying land cover classes. The UAV optical datasets were obtained from the National Oceanic and Atmospheric Administration.
2.2. Data Preprocessing
2.2.1. Sentinel-1b SAR Image
2.2.2. UAVSAR Data
2.3. Data Classification
3. Results
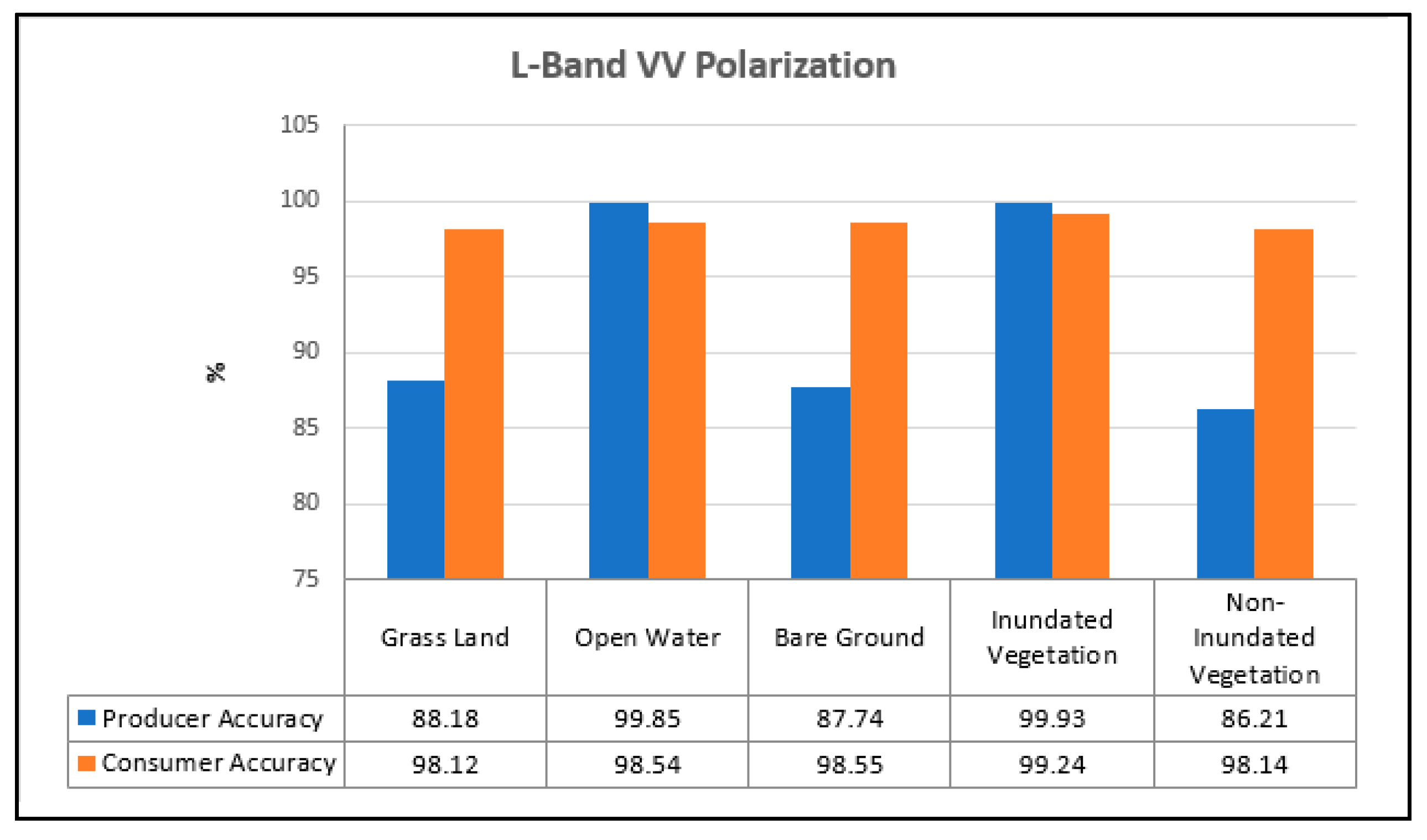
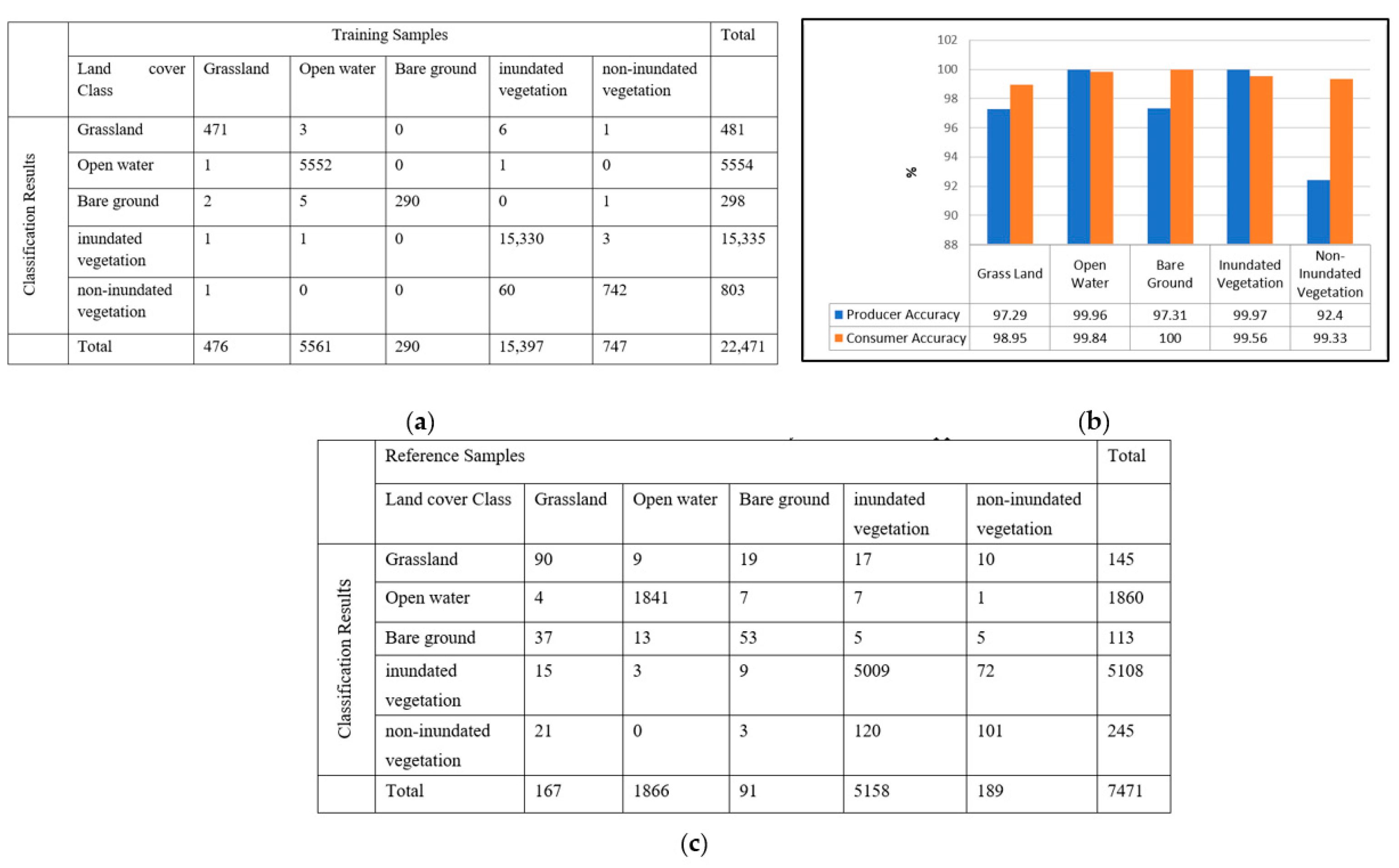
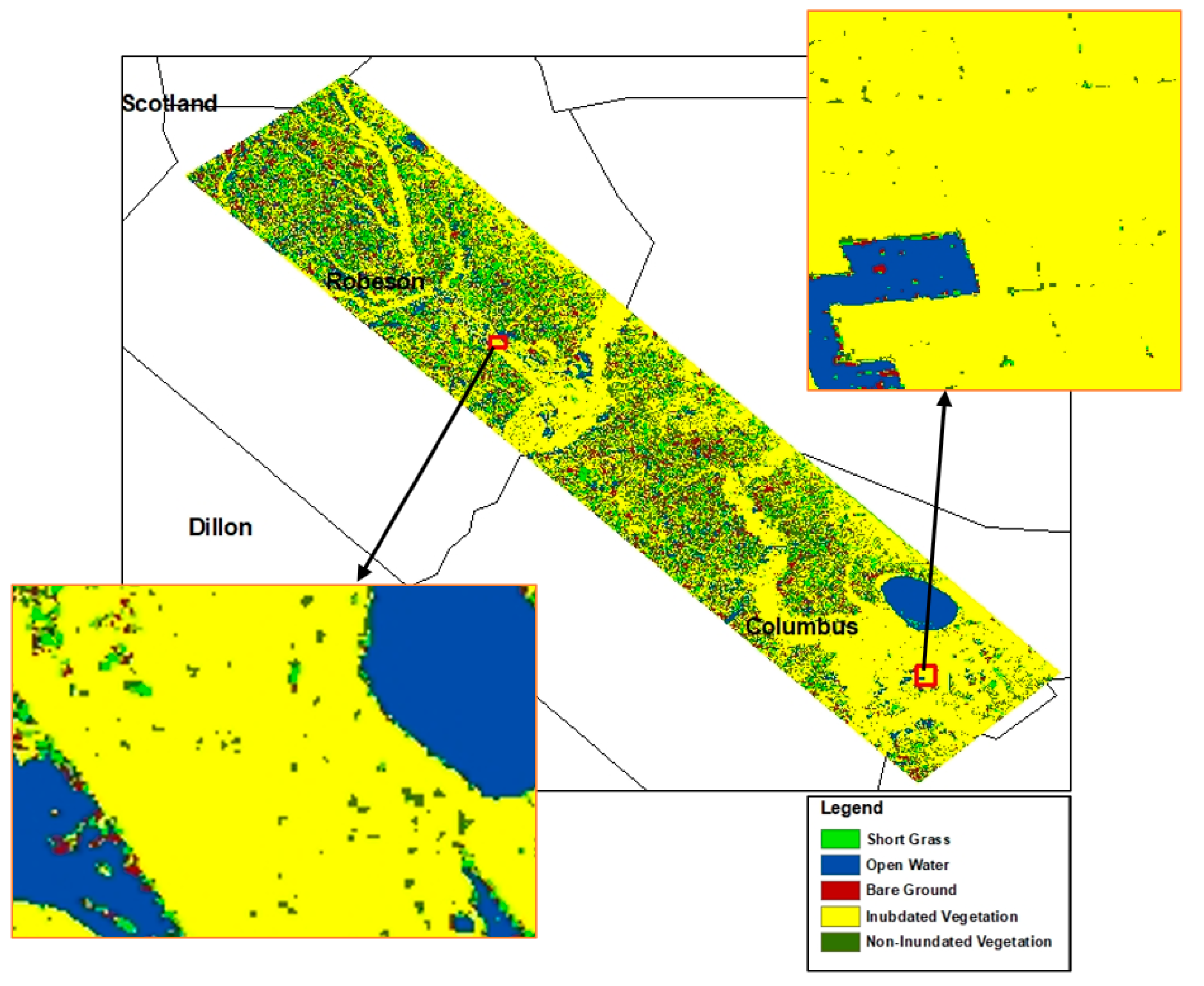
3.1. UAVSAR L-Band Classification Results
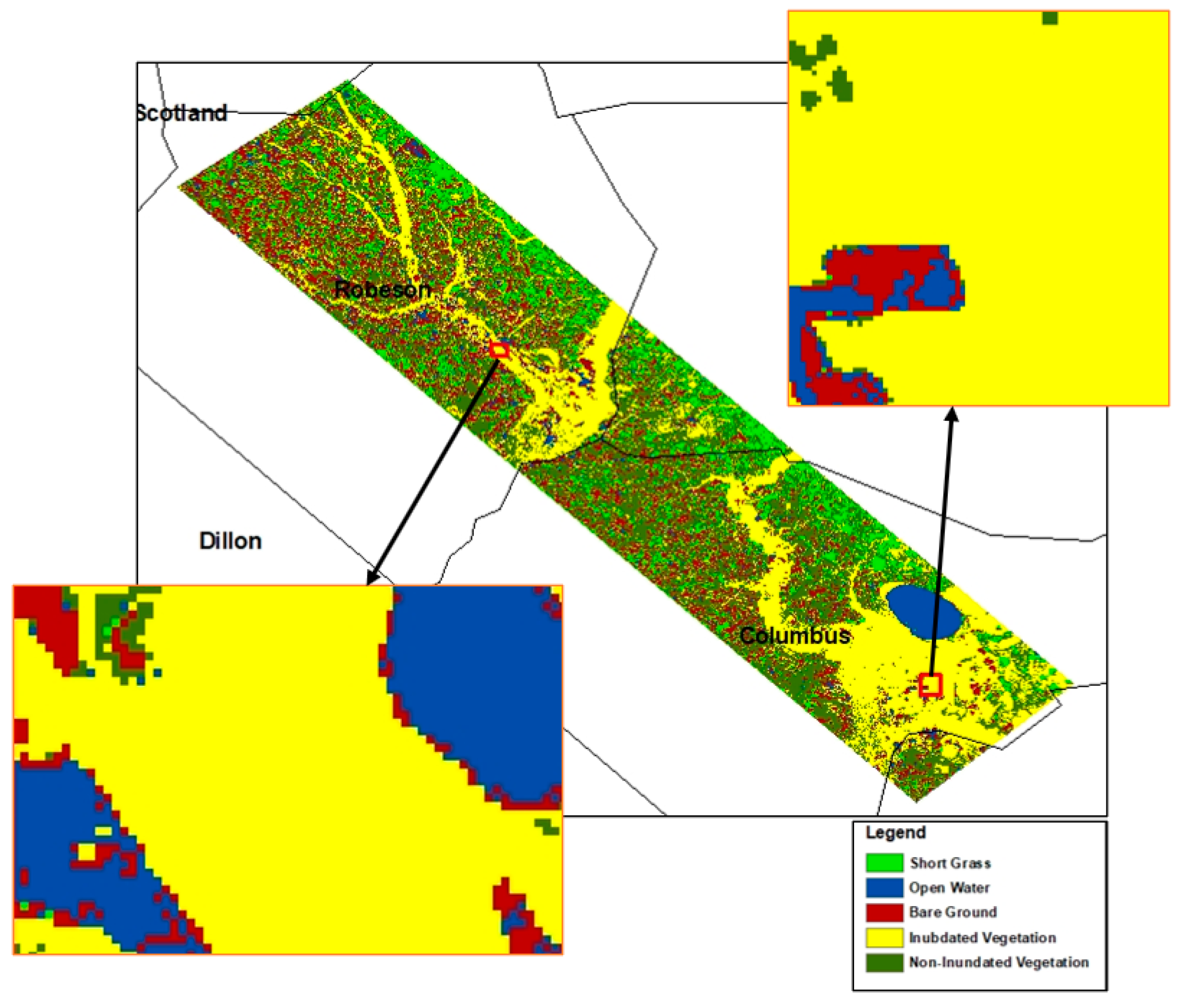
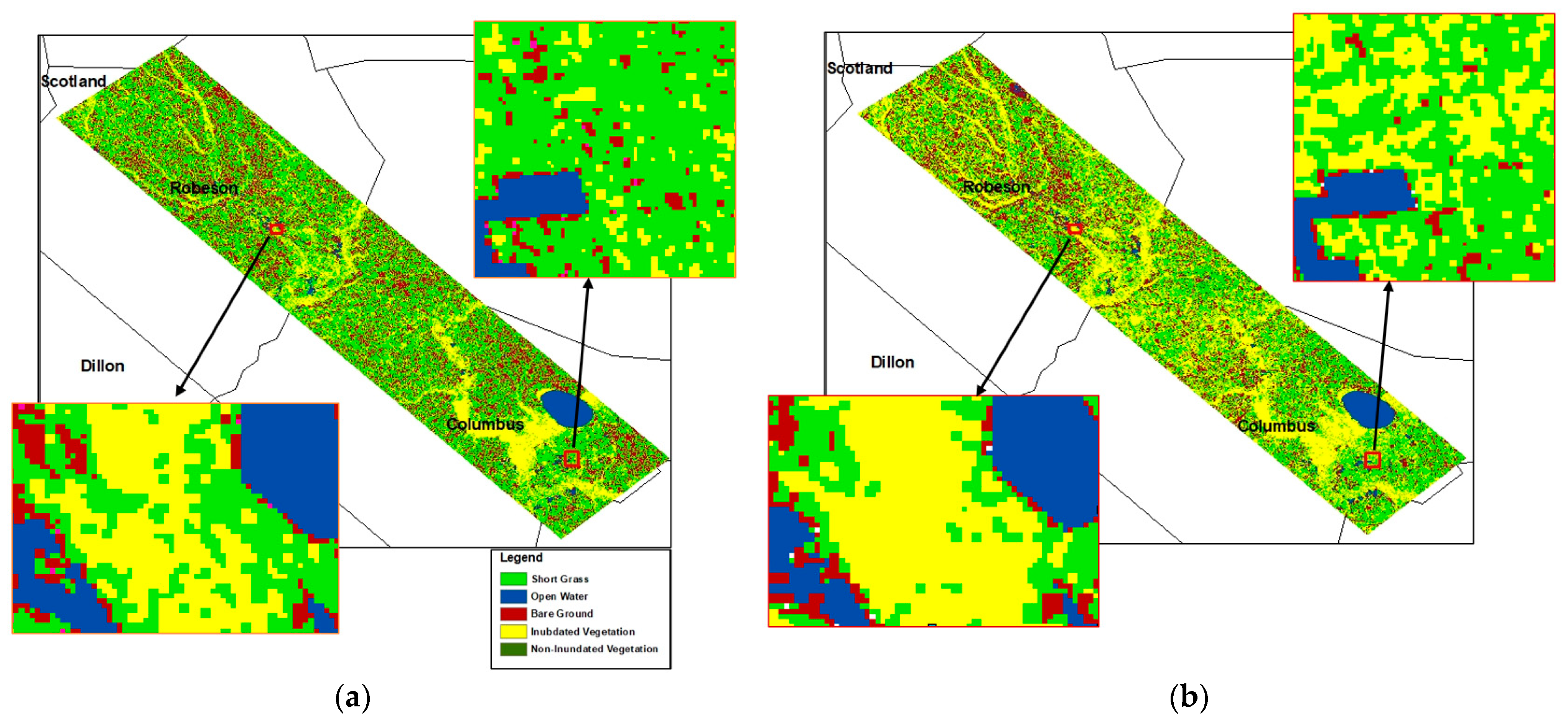
3.2. Sentinel C-Band Classification Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Paterson, D.L.; Wright, H.; A Harris, P.N. Health risks of flood disasters. Clin. Infect. Dis. 2018, 67, 1450–1454. [Google Scholar] [CrossRef] [PubMed]
- Slater, L.J.; Villarini, G. Recent trends in U.S. flood risk. Geophys. Res. Lett. 2016, 43, 12. [Google Scholar] [CrossRef]
- Esposito, G.; Matano, F.; Scepi, G. Analysis of increasing flash flood frequency in the densely urbanized coastline of the campi flegrei volcanic area, Italy. Front. Earth Sci. 2018. [Google Scholar] [CrossRef]
- Zhao, J.; Pelich, R.; Hostache, R.; Matgen, P.; Cao, S.; Wagner, W.; Chini, M. Deriving exclusion maps from C-band SAR time-series in support of floodwater mapping. Remote Sens. Env. 2021, 265, 112668. [Google Scholar] [CrossRef]
- Wang, C.; Pavelsky, T.M.; Yao, F.; Yang, X.; Zhang, S.; Chapman, B.; Song, C.; Sebastian, A.; Frizzelle, B.; Frankenberg, E.; et al. Flood extent mapping during Hurricane Florence with repeat-pass L-band UAVSAR images. ESS Open Arch. 2021. [Google Scholar] [CrossRef]
- Li, Y.; Martinis, S.; Plank, S.; Ludwig, R. An automatic change detection approach for rapid flood mapping in Sentinel-1 SAR data. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 123–135. [Google Scholar] [CrossRef]
- Rosser, J.F.; Leibovici, D.G.; Jackson, M.J. Rapid flood inundation mapping using social media, remote sensing and topographic data. Nat. Hazards 2017, 87, 103–120. [Google Scholar] [CrossRef]
- Manjusree, P.; Kumar, L.; Bhatt, C.M.; Rao, G.S.; Bhanumurthy, V. Optimization of threshold ranges for rapid flood inundation mapping by evaluating backscatter profiles of high incidence angle SAR images. Int. J. Disaster Risk Sci. 2012, 3, 113–122. [Google Scholar] [CrossRef]
- Gebrehiwot, A.; Hashemi-Beni, L.; Thompson, G.; Kordjamshidi, P.; Langan, T.E. Deep convolutional neural network for flood extent mapping using unmanned aerial vehicles data. Sensors 2019, 19, 1486. [Google Scholar] [CrossRef]
- Hashemi-Beni, L.; Gebrehiwot, A. Deep learning for remote sensing image classification for agriculture applications. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2020, XLIV-M-2-2, 51–54. [Google Scholar] [CrossRef]
- Anusha, N.; Bharathi, B. Flood detection and flood mapping using multi-temporal synthetic aperture radar and optical data. Egypt. J. Remote. Sens. Space Sci. 2020, 23, 207–219. [Google Scholar] [CrossRef]
- Gebrehiwot, A.; Hashemi-Beni, L. Automated Indunation Mapping: Comparison of Methods. In Proceedings of the IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3265–3268. [Google Scholar]
- Gebrehiwot, A.; Hashemi-Beni, L. A Method to Generate Flood Maps in 3d Using dem and Deep Learning. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 44, 1800768. [Google Scholar] [CrossRef]
- Beni, L.H.; Jones, J.; Thompson, G.; Johnson, C.; Gebrehiwot, A. Challenges and Opportunities for UAV-Based Digital Elevation Model Generation for Flood-Risk Management: A Case of Princeville, North Carolina. Sensors 2018, 18, 3843. [Google Scholar] [CrossRef]
- Brakenridge, R.; Anderson, E. MODIS-based flood detection, mapping and measurement: The potential for operational hydrological applications. In Transboundary Floods: Reducing Risks Through Flood Management; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2006; pp. 1–12. [Google Scholar] [CrossRef]
- Ban, H.-J.; Kwon, Y.-J.; Shin, H.; Ryu, H.-S.; Hong, S. Flood monitoring using satellite-based RGB composite imagery and refractive index retrieval in visible and near-infrared bands. Remote Sens. 2017, 9, 313. [Google Scholar] [CrossRef]
- Hashemi-Beni, L.; Gebrehiwot, A.A. Flood extent mapping: An integrated method using deep learning and region growing using UAV optical data. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 2127–2135. [Google Scholar] [CrossRef]
- Colesanti, C.; Wasowski, J. Investigating landslides with space-borne Synthetic Aperture Radar (SAR) interferometry. Eng. Geol. 2006, 88, 173–199. [Google Scholar] [CrossRef]
- Rahman, M.R.; Thakur, P.K. Detecting, mapping and analysing of flood water propagation using synthetic aperture radar (SAR) satellite data and GIS: A case study from the Kendrapara District of Orissa State of India. Egypt. J. Remote Sens. Space Sci. 2018, 21, S37–S41. [Google Scholar] [CrossRef]
- Liang, J.; Liu, D. A local thresholding approach to flood water delineation using Sentinel-1 SAR imagery. ISPRS J. Photogramm. Remote. Sens. 2019, 159, 53–62. [Google Scholar] [CrossRef]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P. Flood monitoring in vegetated areas using multitemporal sentinel-1 data: Impact of time series features. Water 2019, 11, 1938. [Google Scholar] [CrossRef]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P.; Ludwig, R. SAR-based detection of flooded vegetation–a review of characteristics and approaches. Int. J. Remote Sens. 2018, 39, 8. [Google Scholar] [CrossRef]
- Paul, S.; Ghebreyesus, D.; Sharif, H.O. Brief Communication: Analysis of the fatalities and socio-economic impacts caused by hurricane florence. Geosciences 2019, 9, 58. [Google Scholar] [CrossRef]
- Filipponi, F. Sentinel-1 GRD preprocessing workflow. Proceedings 2019, 18, 11. [Google Scholar] [CrossRef]
- Luo, Y.; Flett, D. Sentinel-1 Data Border Noise Removal and Seamless Synthetic Aperture Radar Mosaic Generation. Proceedings 2018, 2, 330. [Google Scholar] [CrossRef]
- Rosenqvist, A.; Killough, B. A Layman’s Interpretation Guide to L-Band and C-band Synthetic Aperture Radar Data; Comittee on Earth Observation Satellites: Washington, DC, USA, 2018. [Google Scholar]
- Medasani, S.; Reddy, G.U. Analysis and Evaluation of Speckle Filters by Using Polarimetric Synthetic Aperture Radar Data Through Local Statistics. In Proceedings of the 2nd International Conference on Electronics, Communication and Aerospace Technology, ICECA, Coimbatore, India, 29–31 March 2018; pp. 169–174. [Google Scholar] [CrossRef]
- Guide to S-1 Geocoding Guide to Sentinel-1 Geocoding. Sentinel-1 Mission Performance Center. 2022. Available online: https://sentinel.esa.int/documents/247904/3976352/Guide-to-Sentinel-1-Geocoding.pdf/e0450150-b4e9-4b2d-9b32-dadf989d3bd3 (accessed on 19 May 2022).
- Small, D. Flattening gamma: Radiometric terrain correction for sar imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3081–3093. [Google Scholar] [CrossRef]
- Kellndorfer, J.M.; Pierce, L.E.; Dobson, M.C.; Ulaby, F.T. Toward Consistent Regional-to-Global-Scale Vegetation Characterization Using Orbital SAR Systems. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1396–1411. [Google Scholar] [CrossRef]
- An, W.; Cui, Y.; Yang, J. Three-component model-based decomposition for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2732–2739. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Lee, J.-S.; Grunes, M.; de Grandi, G. Polarimetric SAR speckle filtering and its implication for classification. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2363–2373. [Google Scholar] [CrossRef]
- Liu, X.N.; Cheng, B. Polarimetric SAR Speckle Filtering For High-Resolution Sar Images Using RADARSAT-2 POLSAR SLC data. In Proceedings of the International Conference on Computer Vision in Remote Sensing, Xiamen, China, 16–18 December 2012; pp. 329–334. [Google Scholar] [CrossRef]
- Lee, J.-S.; Ainsworth, T.L.; Wang, Y. Polarization orientation angle and polarimetric SAR scattering characteristics of steep terrain. IEEE Trans. Geosci. Remote Sens. 2018, 56, 7272–7281. [Google Scholar] [CrossRef]
- Ramya, M.; Kumar, S. PolInSAR coherence-based decomposition modeling for scattering characterization: A case study in Uttarakhand, India. Sci. Remote Sens. 2021, 3, 100020. [Google Scholar] [CrossRef]
- Atwood, D.K.; Small, D.; Gens, R. Improving PolSAR Land Cover Classification With Radiometric Correction of the Coherency Matrix. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 848–856. [Google Scholar] [CrossRef]
- Krivanek, V. (Ed.) ICMT 2019: 7th International Conference on Military Technologies, Brno, Czech Republic, 30–31 May 2019; University of Defence: Brno, Czech Republic, 2019. [Google Scholar]
- Hasmadi, M.; Hz, P.; Mf, S. Evaluating supervised and unsupervised techniques for land cover mapping using remote sensing data. Malays. J. Soc. Space 2009, 5, 1. [Google Scholar]
- Li, M.; Zang, S.; Zhang, B.; Li, S.; Wu, C. A Review of Remote Sensing Image Classification Techniques: The Role of Spatio-contextual Information. Eur. J. Remote Sens. 2014, 47, 389–411. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learing. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Pal, M. Ensemble learning with decision tree for remote sensing classification. World Acad. Sci. Eng. Technol. 2007, 36, 258–260. [Google Scholar]
- Millard, K.; Richardson, M. On the importance of training data sample selection in random forest image classification: A case study in peatland ecosystem mapping. Remote Sens. 2015, 7, 8489–8515. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Du, P.; Samat, A.; Waske, B.; Liu, S.; Li, Z. Random forest and rotation forest for fully polarized SAR image classification using polarimetric and spatial features. ISPRS J. Photogramm. Remote Sens. 2015, 105, 38–53. [Google Scholar] [CrossRef]
- Tang, W.; Hu, J.; Zhang, H.; Wu, P.; He, H. Kappa coefficient: A popular measure of rater agreement. Shanghai Arch Psychiatry 2015, 27, 62–67. [Google Scholar] [CrossRef]
- Druce, D.; Tong, X.; Lei, X.; Guo, T.; Kittel, C.; Grogan, K.; Tottrup, C. An optical and sar based fusion approach for mapping surface water dynamics over mainland china. Remote Sens. 2021, 13, 1663. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Samples (VV) | Total | ||||||
|---|---|---|---|---|---|---|---|
| Land Cover Class | Grassland | Open Water | Bare Ground | Inundated Vegetation | Non-Inundated Vegetation | ||
| Classification Results | Grassland | 418 | 46 | 3 | 4 | 3 | 474 |
| Open water | 1 | 5487 | 1 | 5 | 1 | 5495 | |
| Bare ground | 3 | 34 | 272 | 0 | 1 | 310 | |
| inundated vegetation | 1 | 1 | 0 | 15,259 | 8 | 15,269 | |
| non-inundated vegetation | 3 | 0 | 0 | 107 | 688 | 798 | |
| Total | 426 | 5568 | 276 | 15,375 | 701 | 22,346 | |
| Reference Samples (VV) | Total | ||||||
|---|---|---|---|---|---|---|---|
| Land Cover Class | Grassland | Open Water | Bare Ground | Inundated Vegetation | Non-Inundated Vegetation | ||
| Classification Results | Grassland | 40 | 49 | 31 | 9 | 23 | 152 |
| Open water | 26 | 1867 | 18 | 6 | 2 | 1919 | |
| Bare ground | 28 | 44 | 19 | 3 | 7 | 101 | |
| inundated vegetation | 17 | 4 | 5 | 5019 | 129 | 5174 | |
| non-inundated vegetation | 19 | 6 | 6 | 149 | 70 | 250 | |
| Total | 130 | 1970 | 79 | 5186 | 231 | 7596 | |
 | |||||||
| Polarization | OA (T) % | Kappa (T) % | OA (V) % | Kappa (V) % | |
|---|---|---|---|---|---|
| L-band | VV | 99.0 | 97.88 | 92.35 | 83.65 |
| VH | 98.5 | 96.76 | 91.13 | 80.75 | |
| Dual | 99.61 | 99.18 | 94.95 | 89.13 | |
| Full | 99.45 | 98.95 | 98.68 | 97.47 | |
| C-band | VV | 93.54 | 87.82 | 92.57 | 85.81 |
| VH | 92.09 | 83.96 | 83.91 | 75.2 | |
| Dual | 97.53 | 94.61 | 91.96 | 82.91 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salem, A.; Hashemi-Beni, L. Inundated Vegetation Mapping Using SAR Data: A Comparison of Polarization Configurations of UAVSAR L-Band and Sentinel C-Band. Remote Sens. 2022, 14, 6374. https://doi.org/10.3390/rs14246374
Salem A, Hashemi-Beni L. Inundated Vegetation Mapping Using SAR Data: A Comparison of Polarization Configurations of UAVSAR L-Band and Sentinel C-Band. Remote Sensing. 2022; 14(24):6374. https://doi.org/10.3390/rs14246374
Chicago/Turabian StyleSalem, Abdella, and Leila Hashemi-Beni. 2022. "Inundated Vegetation Mapping Using SAR Data: A Comparison of Polarization Configurations of UAVSAR L-Band and Sentinel C-Band" Remote Sensing 14, no. 24: 6374. https://doi.org/10.3390/rs14246374
APA StyleSalem, A., & Hashemi-Beni, L. (2022). Inundated Vegetation Mapping Using SAR Data: A Comparison of Polarization Configurations of UAVSAR L-Band and Sentinel C-Band. Remote Sensing, 14(24), 6374. https://doi.org/10.3390/rs14246374