
Research of Distance-Intensity Imaging Algorithm for Pulsed LiDAR Based on Pulse Width Correction


Abstract
:1. Introduction
2. Plused LiDAR Radiative Transmission Mechanism
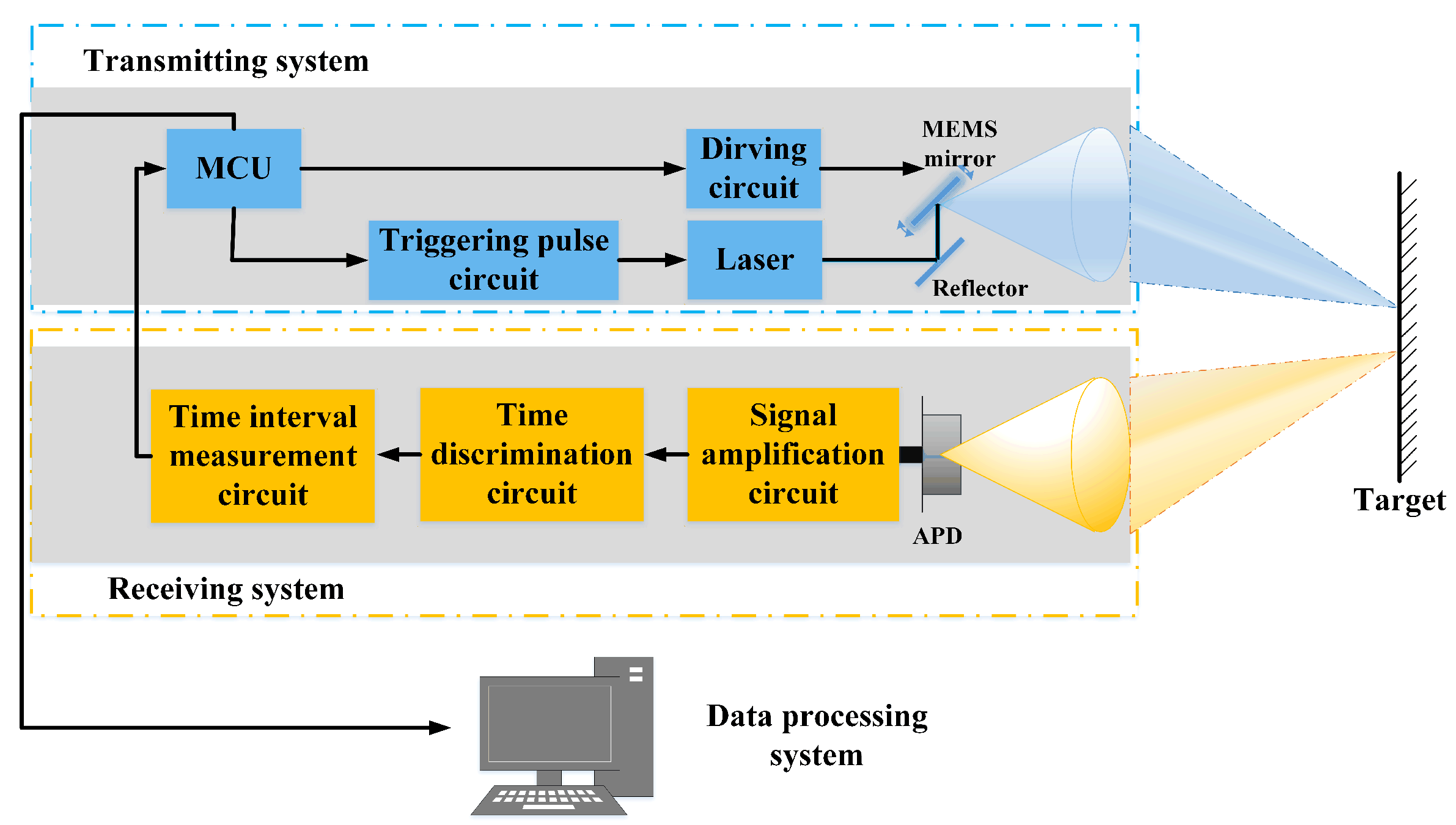
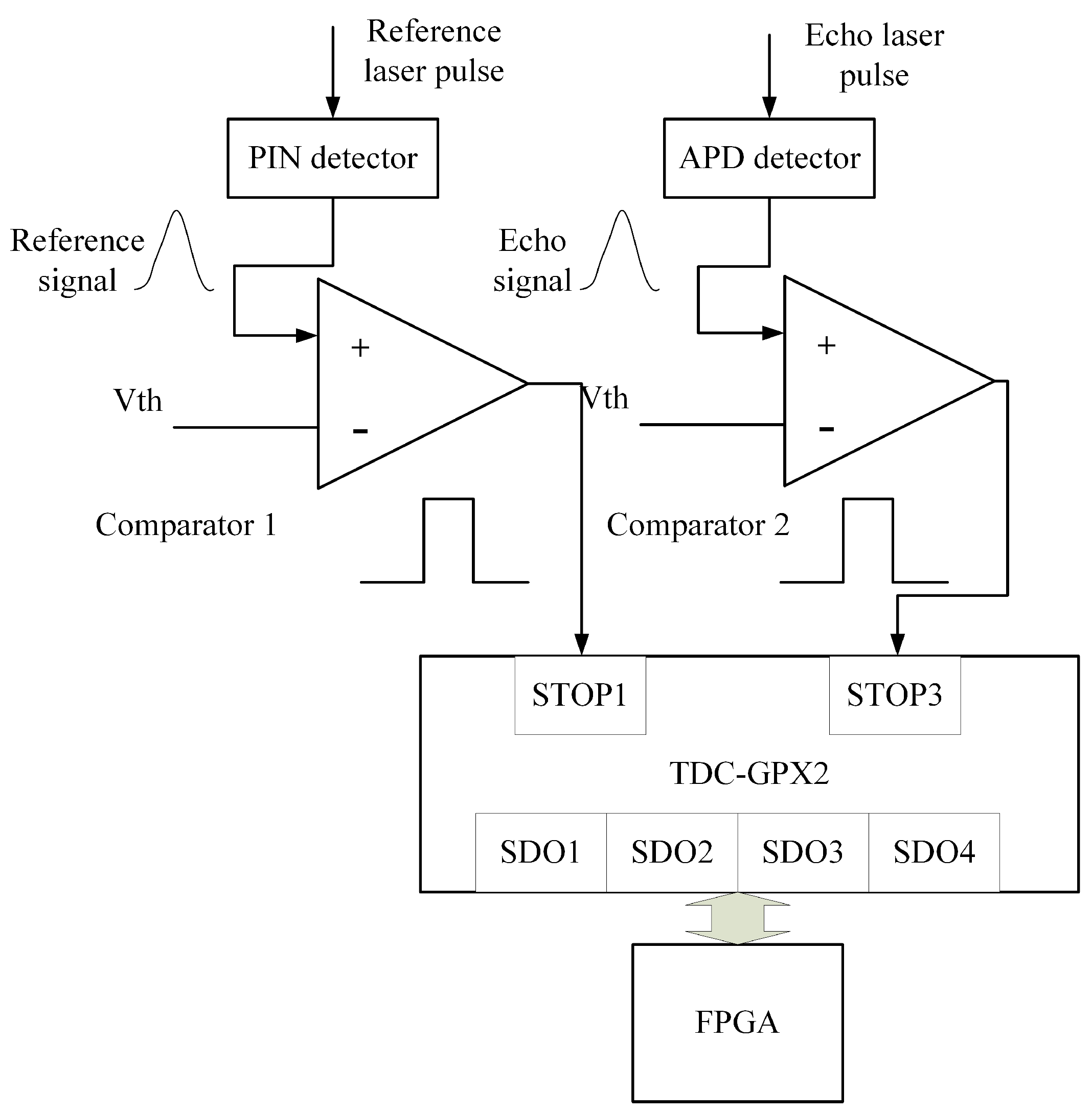
3. Methodology
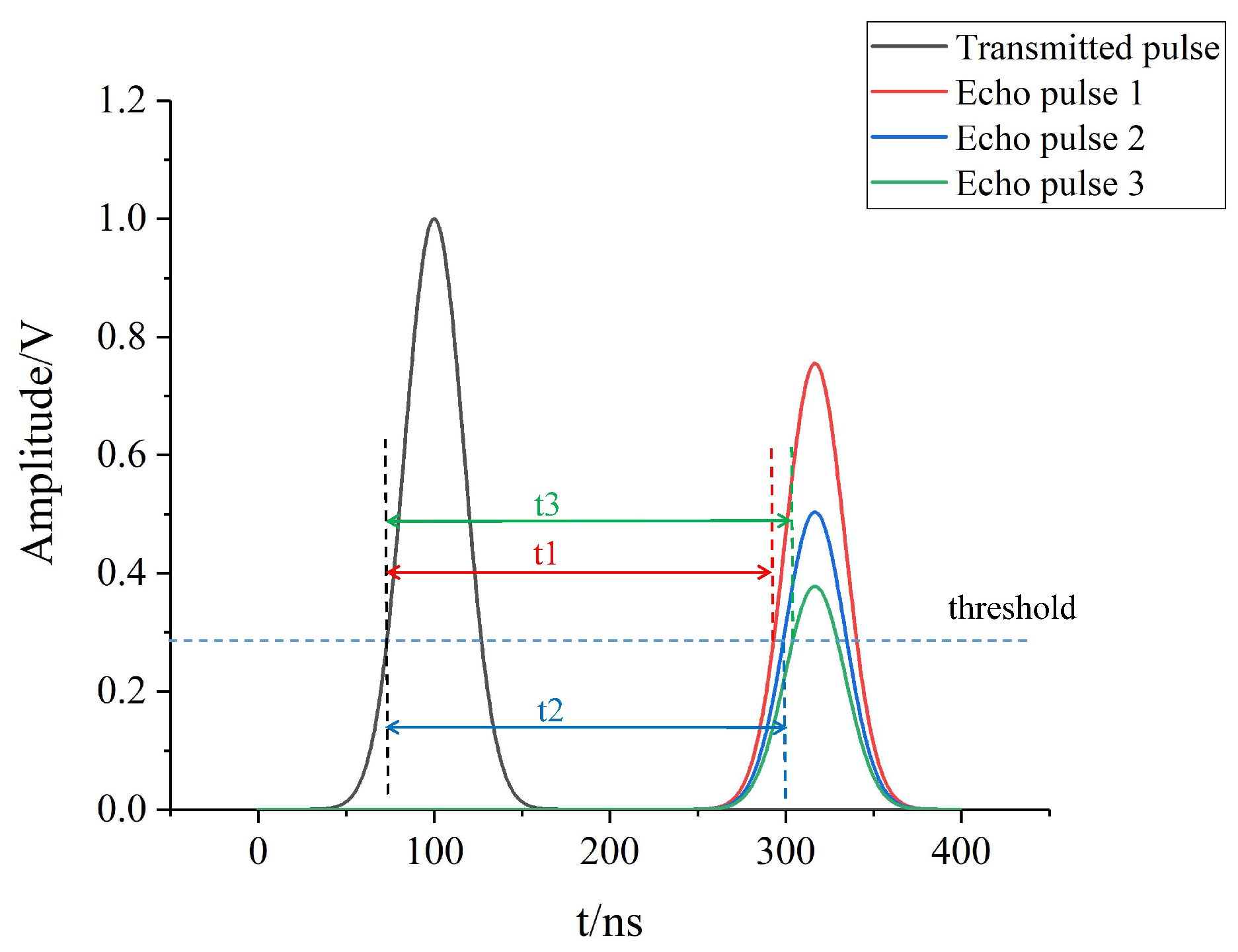
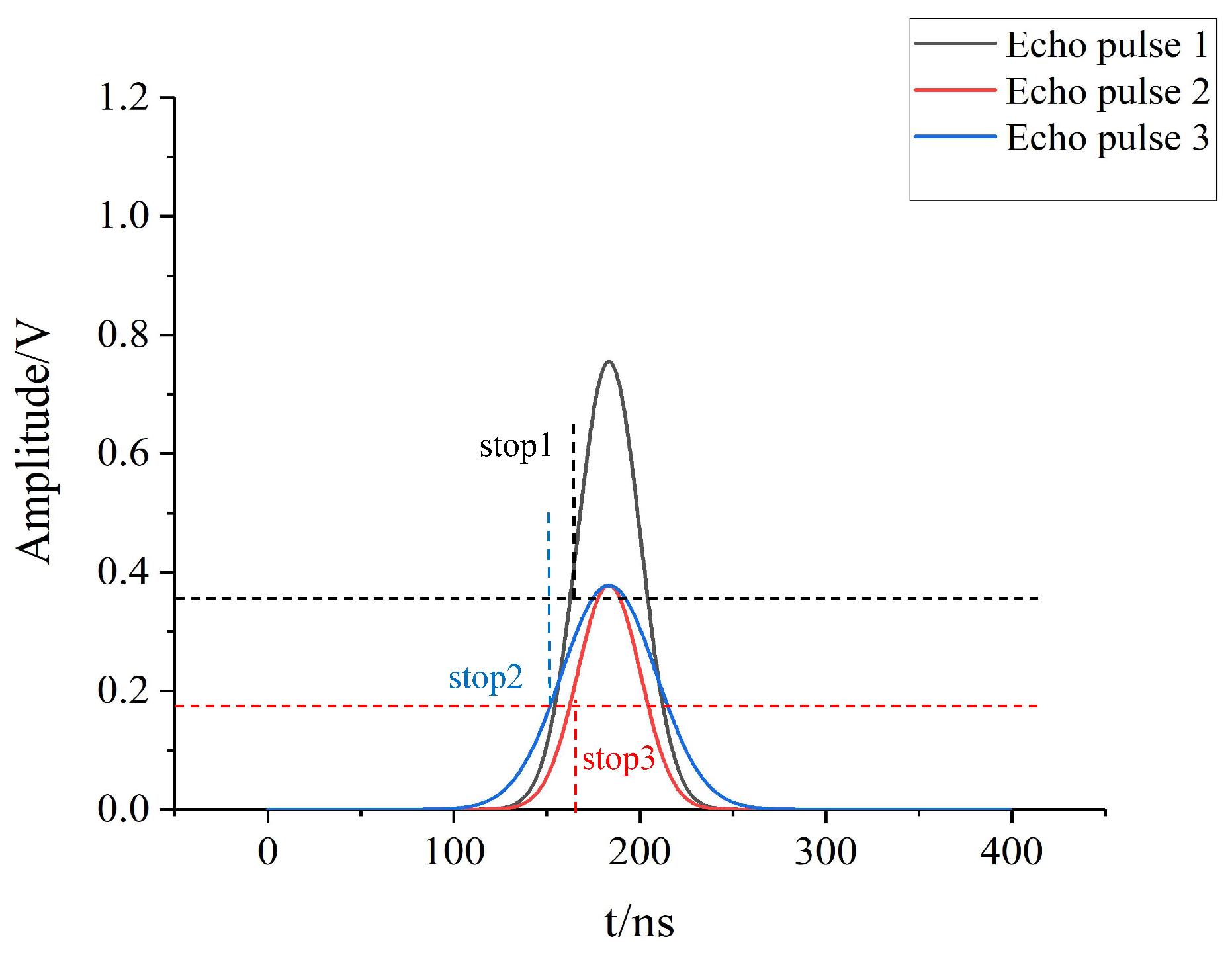
3.1. Time Discrimination Methods for Pulsed LiDAR
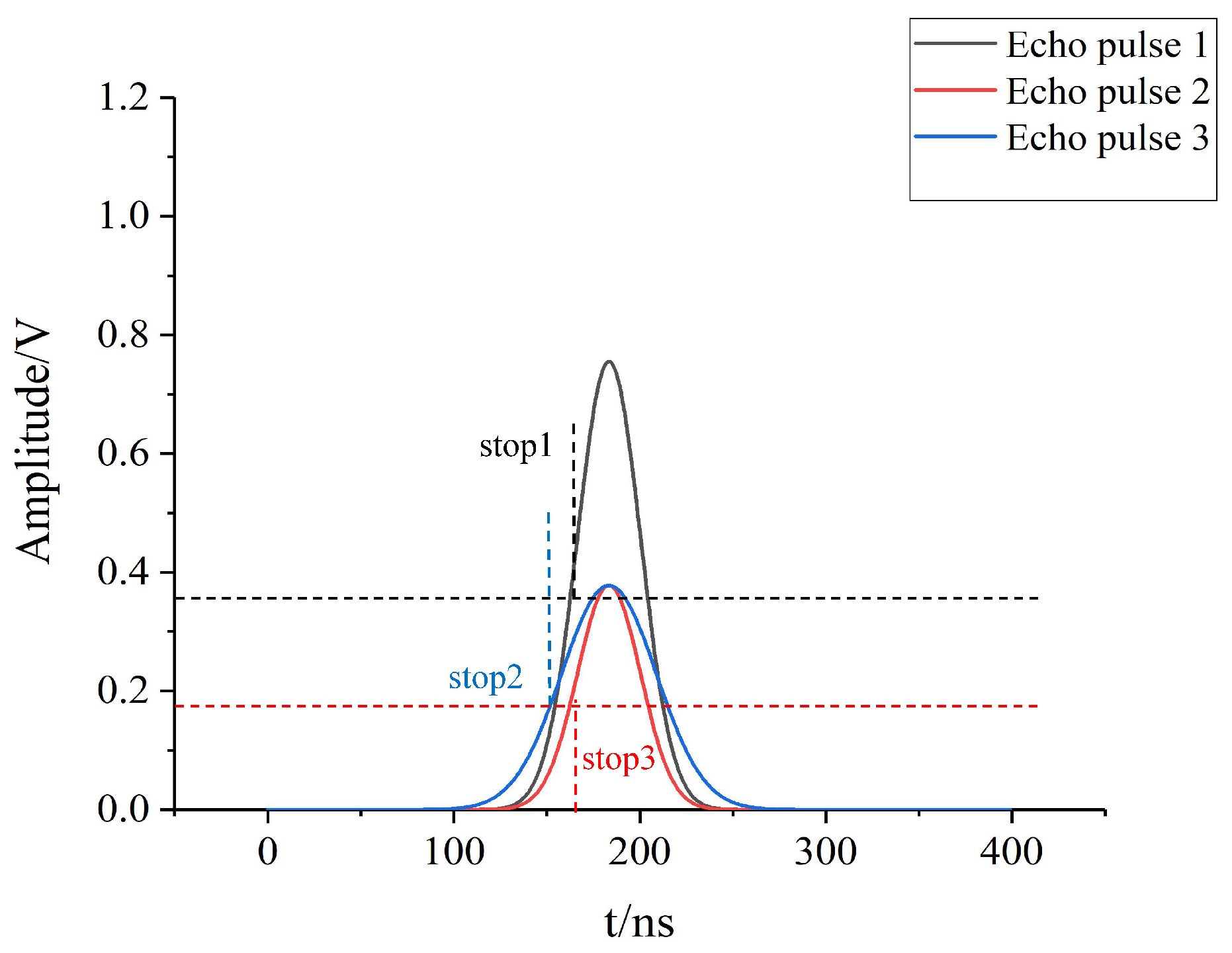
3.1.1. Leading-Edge Discrimination(LD)
3.1.2. Constant Fraction Discrimination (CFD)
3.2. Our Method
4. Experimental Verification
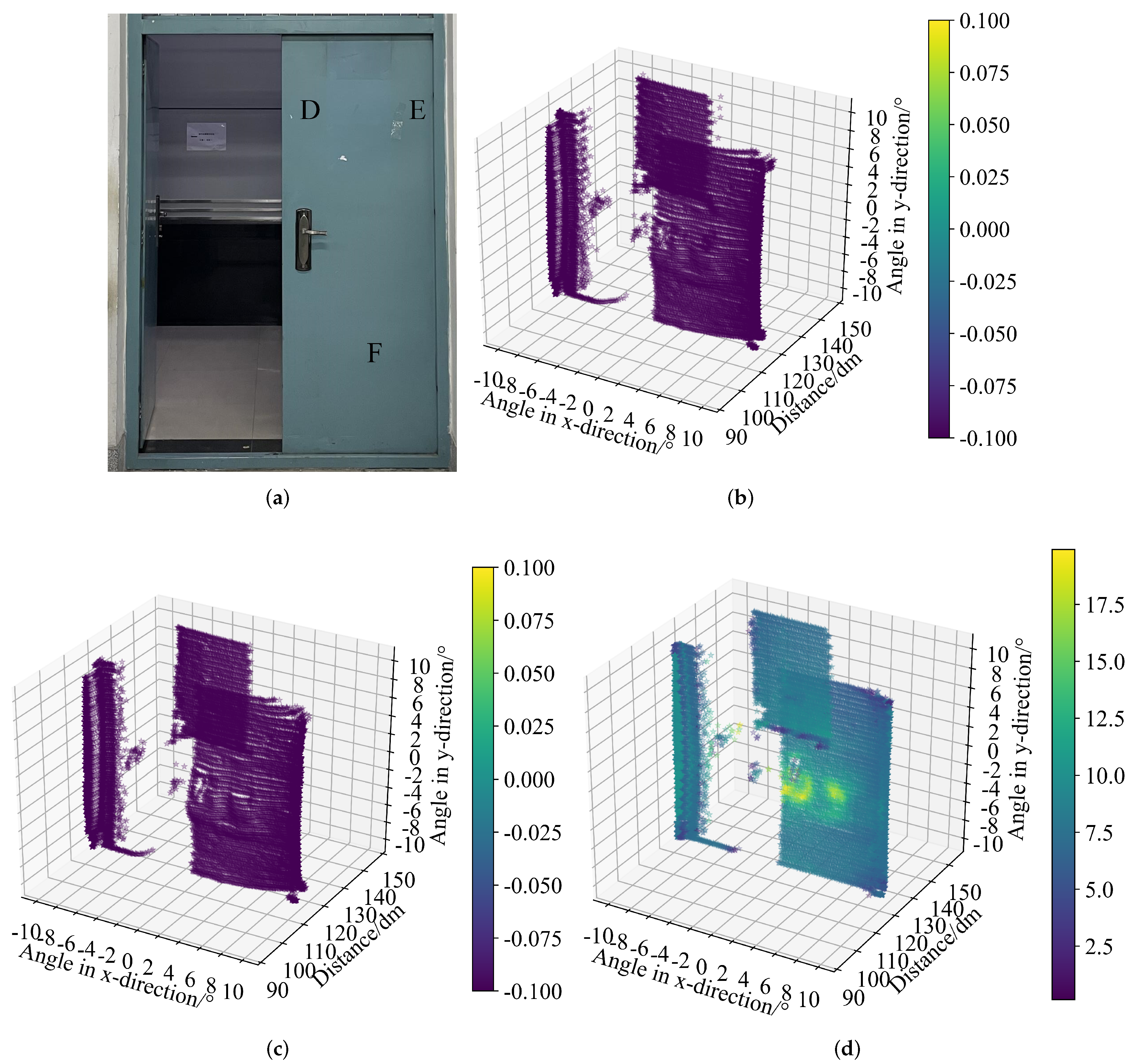
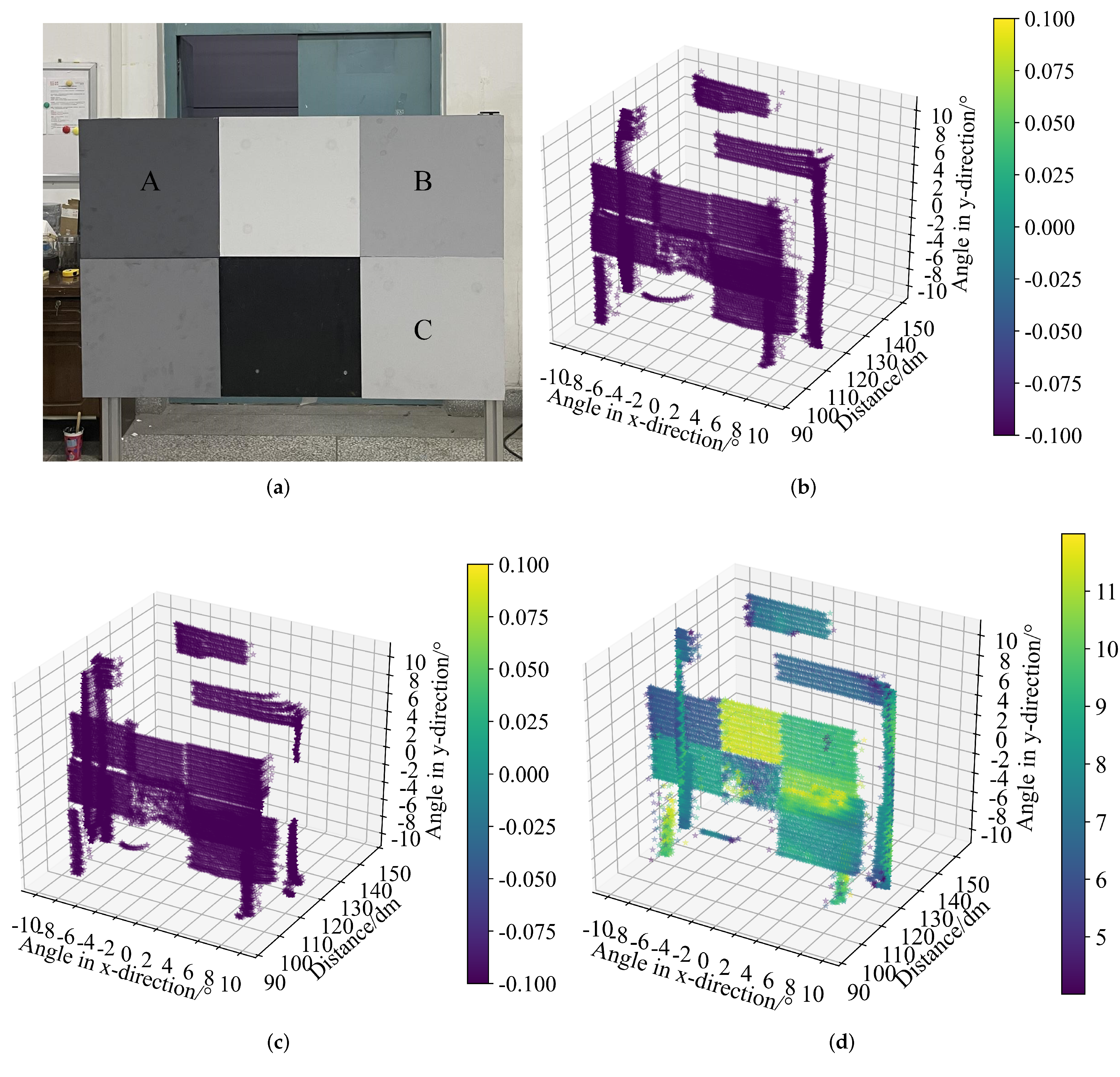
4.1. Experimental Phenomenon
4.2. Experimental Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Korpela, I.; Hovi, A.; Korhonen, L. Backscattering of individual LiDAR pulses from forest canopies explained by photogrammetrically derived vegetation structure. ISPRS J. Photogramm. Remote Sens. 2013, 83, 81–93. [Google Scholar] [CrossRef]
- Fan, Y.C.; Wu, B.T.; Huang, C.J.; Bai, Y.H. Environment Detection of 3D LiDAR by Using Neural Networks. In Proceedings of the 2019 IEEE International Conference on Consumer Electronics, Las Vegas, NV, USA, 11–13 January 2019. [Google Scholar]
- Lum, D.J. Ultrafast time-of-flight 3D LiDAR. Nat. Photonics 2020, 14, 2–4. [Google Scholar] [CrossRef]
- Chen, Z.; Lan, Z.; Long, H.; Hu, Q. 3D modeling of pylon from airborne LiDAR data. In Proceedings of the Remote Sensing of the Environment: 18th National Symposium on Remote Sensing of China, Wuhan, China, 20–23 October 2012; Tong, Q., Shan, J., Zhu, B., Eds.; 2014; Volume 9158. [Google Scholar]
- Kim, T.H.; Park, T.H. Placement Optimization of Multiple Lidar Sensors for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2139–2145. [Google Scholar] [CrossRef]
- Chisholm, R.A.; Rodriguez-Ronderos, M.E.; Lin, F. Estimating Tree Diameters from an Autonomous Below-Canopy UAV with Mounted LiDAR. Remote Sens. 2021, 13, 2576. [Google Scholar] [CrossRef]
- Choi, Y.J.; Rahim, T.; Ramatryana, I.N.A.; Shin, S.Y. Improved CNN-Based Path Planning for Stairs Climbing in Autonomous UAV with LiDAR Sensor. In Proceedings of the 2021 International Conference on Electronics, Information and Communication (ICEIC), Jeju, Korea, 31 January–3 February 2021. [Google Scholar]
- Amann, M.C.; Bosch, T.; Lescure, M.; Myllyla, R.; Rioux, M. Laser ranging: A critical review of usual techniques for distance measurement. Opt. Eng. 2001, 40, 10–19. [Google Scholar]
- Kurtti, S.; Nissinen, J.; Kostamovaara, J. A Wide Dynamic Range CMOS Laser Radar Receiver With a Time-Domain Walk Error Compensation Scheme. IEEE Trans. Circuits Syst. I-Regul. Pap. 2017, 64, 550–561. [Google Scholar] [CrossRef]
- Priyanka, C.; Latha, P. Design and Implementation of Time to Digital Converters. In Proceedings of the 2015 International Conference on Innovations in Information, Embedded and Communication Systems, Coimbatore, India, 19–20 March 2015. [Google Scholar]
- Liu, M.; Liu, H.; Li, X.; Zhu, Z. A 60-m Range 6.16-mW Laser-Power Linear-Mode LiDAR System With Multiplex ADC/TDC in 65-nm CMOS. IEEE Trans. Circuits Syst. I-Regul. Pap. 2020, 67, 753–764. [Google Scholar] [CrossRef]
- Ullrich, A.; Hollaus, M.; Briese, C.; Wagner, W.; Doneus, M. Utilization of full-waveform data in airborne laser scanning applications. In Proceedings of the Laser Radar Technology and Applications XII, The International Society for Optical Engineering, Orlando, FL, USA, 9–13 April 2007; Volume 6550, p. 65500. [Google Scholar]
- Yl, A.; Tc, B.; Ql, A.; Bz, A.; Yb, A.; Cw, A. Waveform centroid discrimination of return pulse weighting method in LIDAR system. Optik 2019, 180, 840–846. [Google Scholar]
- Yoshioka, K.; Kubota, H.; Fukushima, T.; Kondo, S.; Ta, T.T.; Okuni, H.; Watanabe, K.; Hirono, M.; Ojima, Y.; Kimura, K.; et al. A 20-ch TDC/ADC Hybrid Architecture LiDAR SoC for 240 x 96 Pixel 200-m Range Imaging With Smart Accumulation Technique and Residue Quantizing SAR ADC. IEEE J. Solid-State Circuits 2018, 53, 3026–3038. [Google Scholar] [CrossRef]
- Xia, X.; Ye, M.; He, J.; Hu, K.; Zhao, Y. A novel TDC/ADC hybrid reconstruction ROIC for LiDAR. Ieice Electron. Express 2019, 16, 20181076. [Google Scholar] [CrossRef] [Green Version]
- Zhou, G.; Huang, W.; Zhou, X.; Zhang, L.; Chen, P.; Huang, J.; Zhang, R. A new Approach to minimize walk error in pulsed Laser rangefinding. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium, Fort Worth, TX, USA, 23–28 July 2017; pp. 1708–1711. [Google Scholar]
- Yao, P.; Tu, B.; Wang, X.; Zhang, Y.; Zhao, P. A high performance constant fraction discriminator for pulsed laser proximity fuze. In Proceedings of the Selected Papers from Conferences of the Photoelectronic Technology Committee of the Chinese Society of Astronautics 2014, Part II, China, 1 August–1 October 2014; Du, X., Fan, D., Le, J., Lv, Y., Yao, J., Bao, W., Wang, L., Eds.; 2015; Volume 9522. Available online: https://www.spiedigitallibrary.org/conference-proceedings-of-spie/9522/1/A-high-performance-constant-fraction-discriminator-for-pulsed-laser-proximity/10.1117/12.2179946.short?SSO=1%EF%BC%8C (accessed on 13 December 2021).
- Palojarvi, P.; Ruotsalainen, T.; Kostamovaara, J. A 250-MHz BiCMOS receiver channel with leading edge timing discriminator for a pulsed time-of-flight laser rangefinder. IEEE J. Solid-State Circuits 2005, 40, 1341–1349. [Google Scholar] [CrossRef]
- Kurtti, S.; Kostamovaara, J. An integrated optical receiver with widerange timing discrimination characteristics. In Proceedings of the Esscirc 2005: Proceedings of the 31st European Solid-State Circuits Conference, Grenoble, France, 12–16 September 2005; pp. 435–438. [Google Scholar]
- Abdallah, H.; Baghdadi, N.; Bailly, J.S.; Pastol, Y.; Fabre, F. Wa-LiD: A New LiDAR Simulator for Waters. IEEE Geosci. Remote Sens. Lett. 2012, 9, 744–748. [Google Scholar] [CrossRef] [Green Version]
- Yan, S.; Yang, G.; Li, Q.; Zhang, B.; Wang, C. Distance–Intensity Image Strategy for Pulsed LiDAR Based on the Double-Scale Intensity-Weighted Centroid Algorithm. Remote Sens. 2021, 13, 432. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Laser wavelength | 1550 nm |
| Laser pulse width | 10 ns |
| Laser beam diameter | 1.0 mm |
| Angle of divergence | 0.51 mrad |
| Size of APD photosensitive surface | 1 mm |
| TDC | GPX2 |
| Target Reflectivity | Mean Ranging Result of LED (ps) | Variance (ps) | Mean Ranging Result of CFD (ps) | Variance (ps) | Mean Ranging Result of Our Algorithm (ps) | Variance (ps) |
|---|---|---|---|---|---|---|
| 10% | 70,924.70 | 56,548.28 | 70,912.50 | 51,479.56 | 70,739.80 | 34,499.76 |
| 20% | 68,359.95 | 4563.23 | 68,515.30 | 4125.41 | 70,753.20 | 2891.41 |
| 35% | 67,544.38 | 2777.36 | 67,541.45 | 2532.42 | 70,771.33 | 2322.06 |
| 50% | 67,233.22 | 2207.41 | 67,321.22 | 2212.27 | 70,781.56 | 2162.92 |
| 75% | 66,861.95 | 1725.11 | 66,898.32 | 1895.68 | 70,800.12 | 2119.94 |
| Methods | Surface Evenness of Diffuse Reflection Plate | Surface Evenness of Metal Door Panels with Painted |
|---|---|---|
| Leading edge discrimination | 0.5130 | 1.9776 |
| Constant fraction discrimination | 0.4992 | 1.8775 |
| Our algorithm | 0.2725 | 0.3230 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, S.; Yang, G.; Li, Q.; Wang, Y.; Wang, C. Research of Distance-Intensity Imaging Algorithm for Pulsed LiDAR Based on Pulse Width Correction. Remote Sens. 2022, 14, 507. https://doi.org/10.3390/rs14030507
Yan S, Yang G, Li Q, Wang Y, Wang C. Research of Distance-Intensity Imaging Algorithm for Pulsed LiDAR Based on Pulse Width Correction. Remote Sensing. 2022; 14(3):507. https://doi.org/10.3390/rs14030507
Chicago/Turabian StyleYan, Shiyu, Guohui Yang, Qingyan Li, Yue Wang, and Chunhui Wang. 2022. "Research of Distance-Intensity Imaging Algorithm for Pulsed LiDAR Based on Pulse Width Correction" Remote Sensing 14, no. 3: 507. https://doi.org/10.3390/rs14030507
APA StyleYan, S., Yang, G., Li, Q., Wang, Y., & Wang, C. (2022). Research of Distance-Intensity Imaging Algorithm for Pulsed LiDAR Based on Pulse Width Correction. Remote Sensing, 14(3), 507. https://doi.org/10.3390/rs14030507