
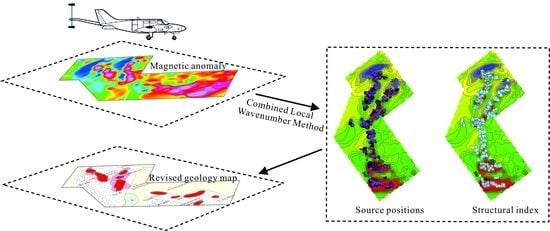
High-Precision Source Positions Obtained by the Combined Inversion of Different-Order Local Wavenumbers Derived from Aeromagnetic Data


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Different-Order Local Wavenumber Method
2.1. 2D Local Wavenumber Method
2.2. 3D Local Wavenumber Method
- Using a small solution space window to assess isolated solutions. If the distance between the point and all other points belonging to a cluster is less than the threshold but not more than the sampling interval, then the point belongs to the cluster;
- Fusing or joining clusters if the horizontal centers are less than the root square of 10% with the position of the center;
- Finally, eliminating a cluster if it has fewer than a given number of solutions because clusters with a small number of points are not statistically important.
3. Experiments and Results
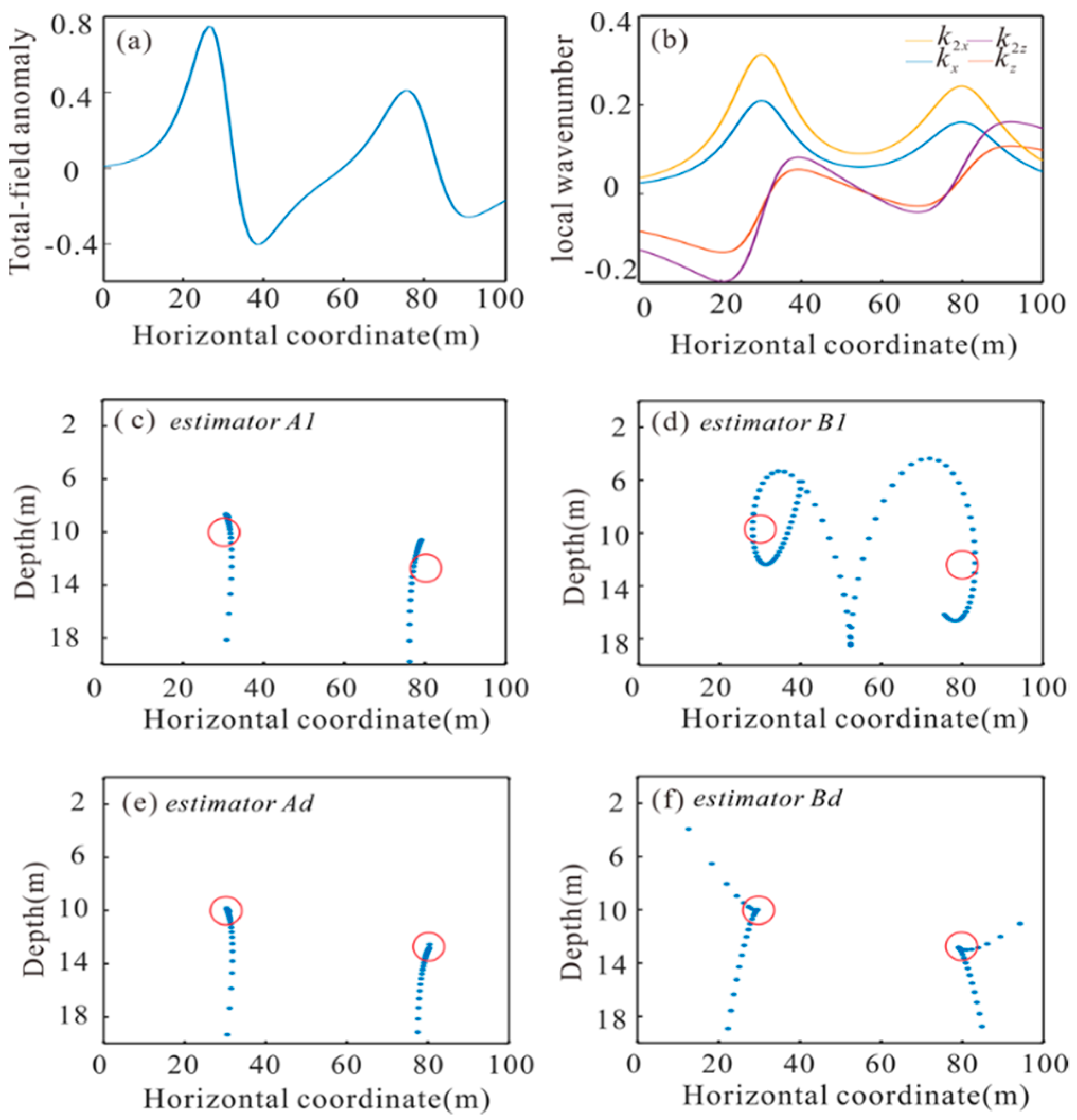
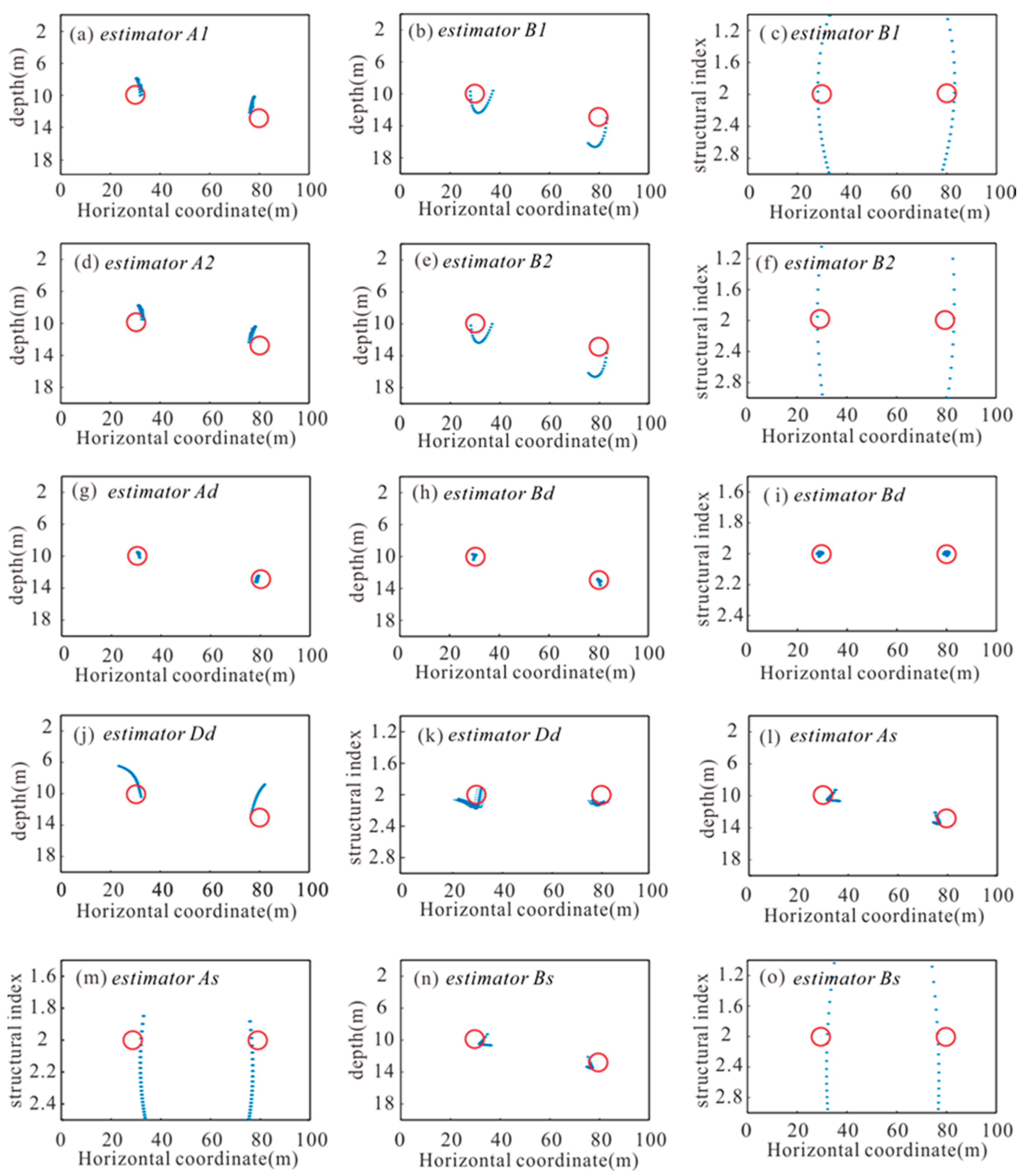
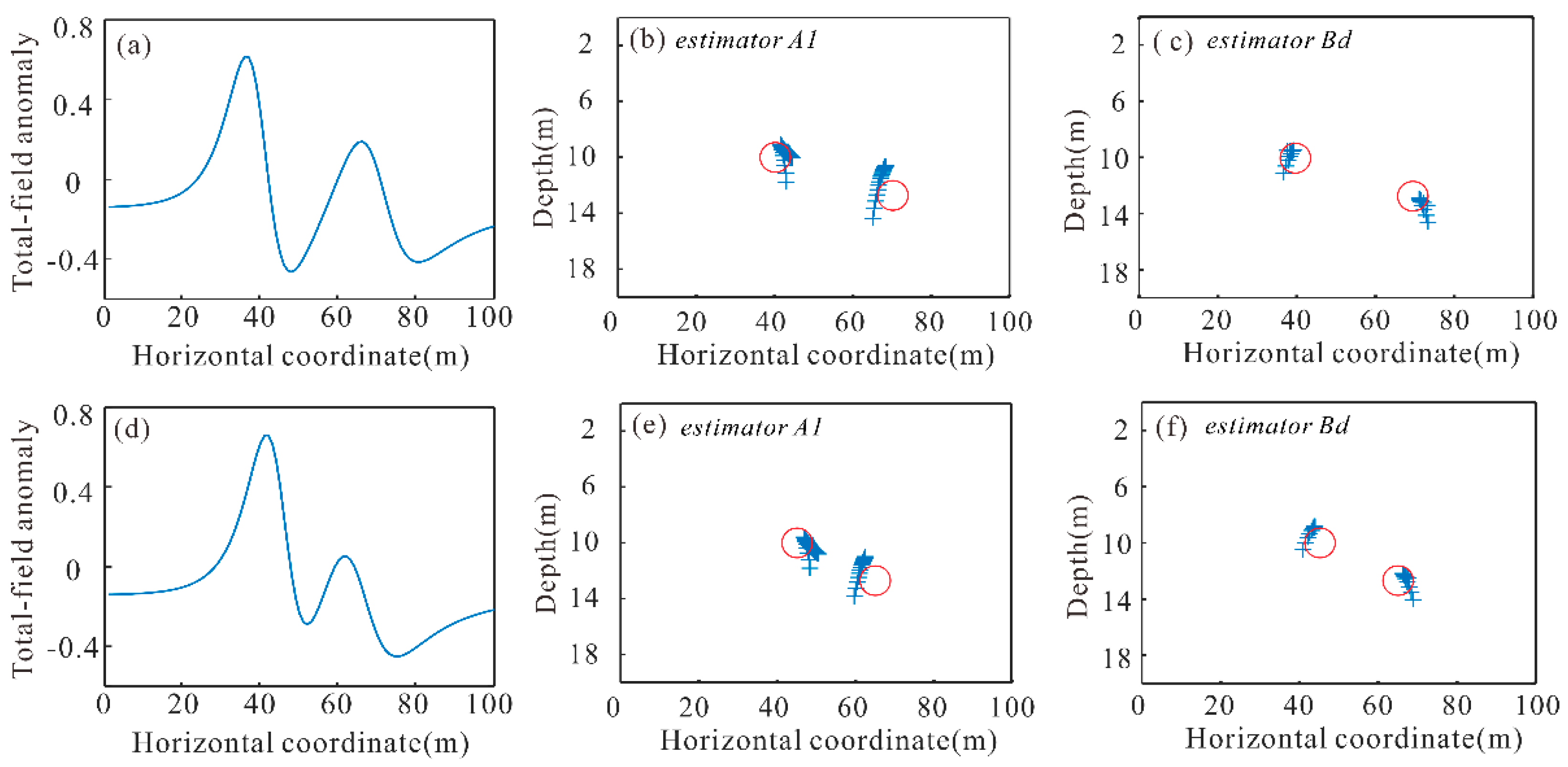
3.1. 2D Theoretical Model
3.2. 3D Theoretical Model
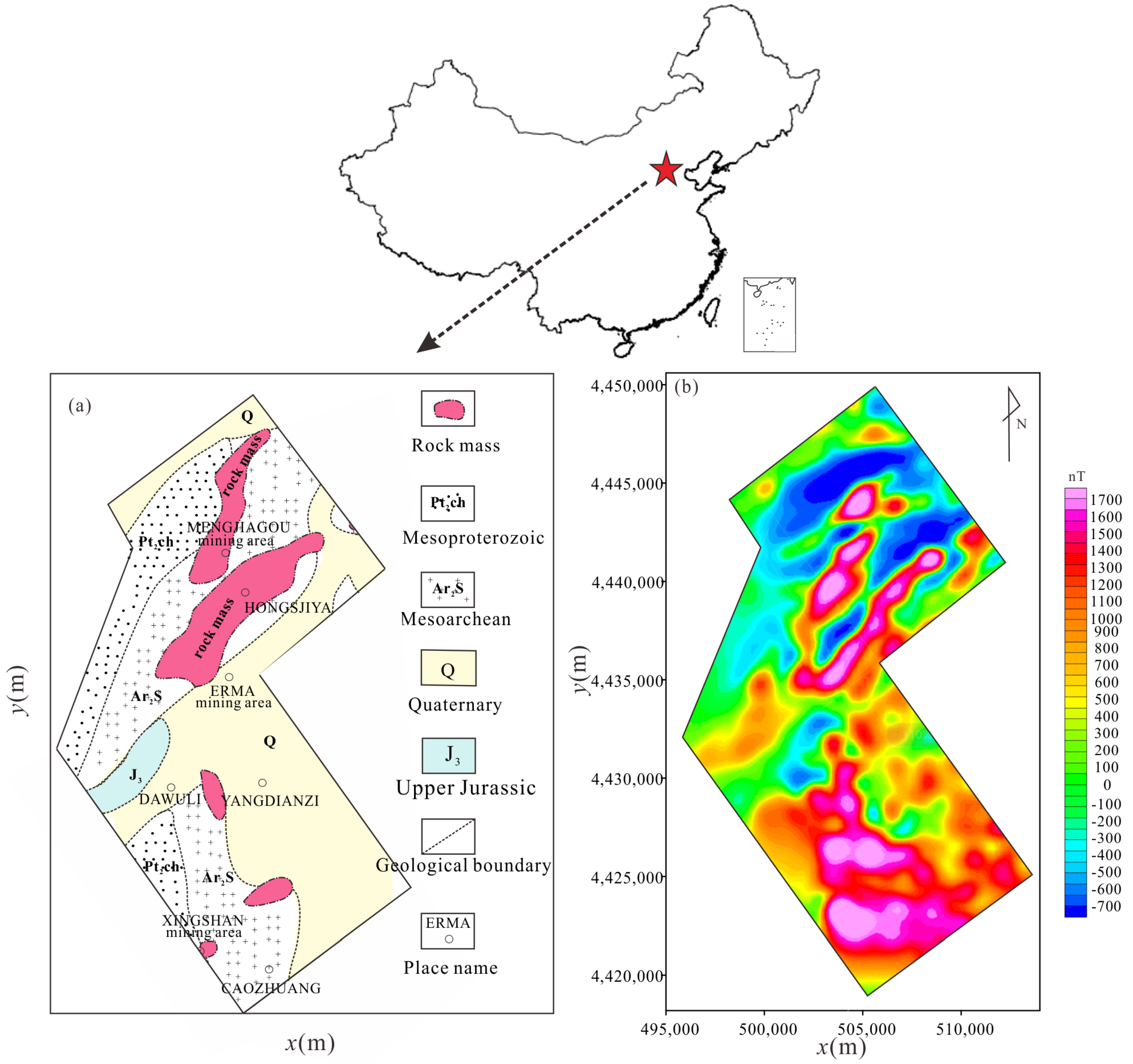
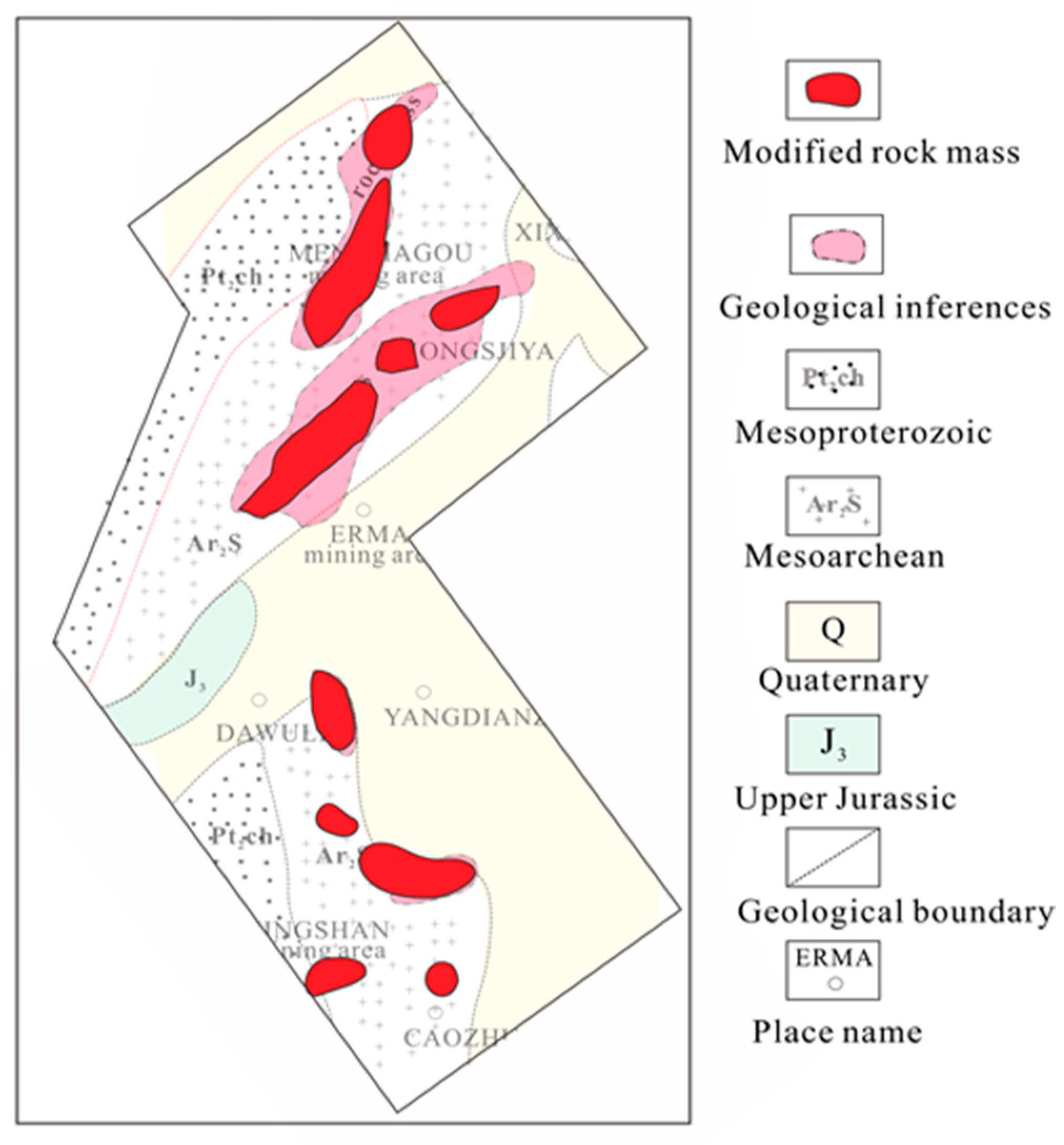
4. Real Magnetic Data Applications
5. Discussion and Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Reford, M.S.; Sumner, J.S. Aeromagnetics. Geophysics 1964, 29, 482–516. [Google Scholar] [CrossRef]
- Tezkan, B.; Stoll, J.B.; Bergers, R.; Crofbach, H. Unmanned aircraft system proves itself as a geophysical measuring platform for aeromagnetic surveys. First Break 2011, 29, 103–105. [Google Scholar]
- Eppelbaum, L.; Mishne, A. Unmanned Airborne Magnetic and VLF Investigations: Effective Geophysical Methodology for the Near Future. Positioning 2011, 2, 112–133. [Google Scholar] [CrossRef] [Green Version]
- Ibrahim, A.; Gemail, K.; Abdelrahman, K.; Al-Otaibi, N.; Ibrahim, E.; Saada, S. Multi-Scale Geophysical Methodologies Applied to Image Archaeological Ruins at Various Depths in Highly Terraneous Sites. Remote Sens. 2021, 13, 2055. [Google Scholar] [CrossRef]
- Zhu, X.; Zheng, H.; Lu, M. Lateral variation of aeromagnetic anomaly in South China and its tectonic implications. Int. J. Earth Sci. 2019, 108, 1493–1507. [Google Scholar] [CrossRef]
- Gao, X.; Xiong, S.; Yu, C.; Zhang, D.; Wu, C. The Estimation of Magnetite Prospective Resources Based on Aeromagnetic Data: A Case Study of Qihe Area, Shandong Province, China. Remote Sens. 2021, 13, 1216. [Google Scholar] [CrossRef]
- Ebele, J.E.; Ofoegbu, C.O.; Nur, A. Interpretation of high-resolution aeromagnetic and radiometric data for delineation of mineral potential zones over Abuja and Environs, North-Central Nigeria. Arab. J. Geosci. 2021, 14, 1947. [Google Scholar] [CrossRef]
- Elkhateeb, S.O.; Eldosouky, A.M.; Khalifa, M.O.; Aboalhassan, M. Probability of mineral occurrence in the Southeast of Aswan area, Egypt, from the analysis of aeromagnetic data. Arab. J. Geosci. 2021, 14, 1514. [Google Scholar] [CrossRef]
- Werner, S. Interpretation of Magnetic Anomalies at Sheet-Like Bodies. Geophys. Prospect. 1953, 57, 447–459. [Google Scholar]
- Thompson, D.T. EULDPH: A new technique for making computer-assisted depth estimates from magnetic data. Geophysics 1982, 47, 31–37. [Google Scholar] [CrossRef]
- Nabighian, M.N. The analytic signal of two-dimensional magnetic bodies with polygonal cross-section: Its properties and use for automated anomaly interpretation. Geophysics 1972, 37, 507–517. [Google Scholar] [CrossRef]
- Salem, A.; Ravat, D. A combined analytic signal and Euler method (AN-EUL) for automatic interpretation of magnetic data. Geophysics 2003, 68, 1952–1961. [Google Scholar] [CrossRef]
- Thurston, J.B.; Brown, R.J. Automated source-edge location with a new variable pass-band horizontal-gradient operator. Geophysics 1994, 59, 546–554. [Google Scholar] [CrossRef]
- Salem, A.; Ravat, D.; Smith, R.; Ushijima, K. Interpretation of magnetic data using an enhanced local wavenumber (ELW) method. Geophysics 2005, 70, L7–L12. [Google Scholar] [CrossRef]
- Bracewell, R. The Fourier Transform and Its Applications. McGraw Hill Book Co.: New York, NY, USA, 1965; pp. 222–224.
- Smith, R.; Thurston, J.B.; Dai, T.; MacLeod, I.N. iSPI TM—the improved source parameter imaging method. Geophys. Prospect. 1998, 46, 141–151. [Google Scholar] [CrossRef]
- Smith, R.; Salem, A. Imaging depth, structure, and susceptibility from magnetic data: The advanced source-parameter imaging method. Geophysics 2005, 70, L31–L38. [Google Scholar] [CrossRef]
- Keating, P. Improved use of the local wavenumber in potential-field interpretation. Geophysics 2009, 74, L75–L85. [Google Scholar] [CrossRef]
- Abbas, M.A.; Fedi, M.; Florio, G. Improving the local wavenumber method by automatic DEXP transformation. J. Appl. Geophys. 2014, 111, 250–255. [Google Scholar] [CrossRef]
- Ma, G.-Q.; Ming, Y.-B.; Han, J.-T.; Li, L.-L.; Meng, Q.-F. Fast local wavenumber (FLW) method for the inversion of magnetic source parameters. Appl. Geophys. 2018, 15, 353–360. [Google Scholar] [CrossRef]
- Ma, G. Improved Local Wavenumber Methods in the Interpretation of Potential Field Data. Pure Appl. Geophys. Pageoph. 2012, 170, 633–643. [Google Scholar] [CrossRef]
- Salem, A.; Williams, S.; Fairhead, D.; Smith, R.; Ravat, D. Interpretation of magnetic data using tilt-angle derivatives. Geophysics 2008, 73, L1–L10. [Google Scholar] [CrossRef]
- Reid, A.B.; Ebbing, J.; Webb, S.J. Avoidable Euler Errors—The use and abuse of Euler deconvolution applied to potential fields. Geophys. Prospect. 2014, 62, 1162–1168. [Google Scholar] [CrossRef]
- Juan, H.H.; Kevin, L.M. Hilbert transform of gravity gradient profiles: Special cases of the general gravity-gradient tensor in the Fourier transform domain. Geophysics 2002, 67, 766–769. [Google Scholar]
- Reid, A.B.; Allsop, J.M.; Granser, H.; Millett, A.J.; Somerton, I.W. Magnetic interpretation in three dimensions using Euler deconvolution. Geophysics 1990, 55, 80–91. [Google Scholar] [CrossRef] [Green Version]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, G.; Wang, N.; Li, L. High-Precision Source Positions Obtained by the Combined Inversion of Different-Order Local Wavenumbers Derived from Aeromagnetic Data. Remote Sens. 2022, 14, 591. https://doi.org/10.3390/rs14030591
Ma G, Wang N, Li L. High-Precision Source Positions Obtained by the Combined Inversion of Different-Order Local Wavenumbers Derived from Aeromagnetic Data. Remote Sensing. 2022; 14(3):591. https://doi.org/10.3390/rs14030591
Chicago/Turabian StyleMa, Guoqing, Nan Wang, and Lili Li. 2022. "High-Precision Source Positions Obtained by the Combined Inversion of Different-Order Local Wavenumbers Derived from Aeromagnetic Data" Remote Sensing 14, no. 3: 591. https://doi.org/10.3390/rs14030591
APA StyleMa, G., Wang, N., & Li, L. (2022). High-Precision Source Positions Obtained by the Combined Inversion of Different-Order Local Wavenumbers Derived from Aeromagnetic Data. Remote Sensing, 14(3), 591. https://doi.org/10.3390/rs14030591