
An Improved Sea Ice Classification Algorithm with Gaofen-3 Dual-Polarization SAR Data Based on Deep Convolutional Neural Networks

Abstract
:
1. Introduction
2. Study Area and Data Preprocessing
2.1. Study Area and Data
2.2. Data Preprocessing
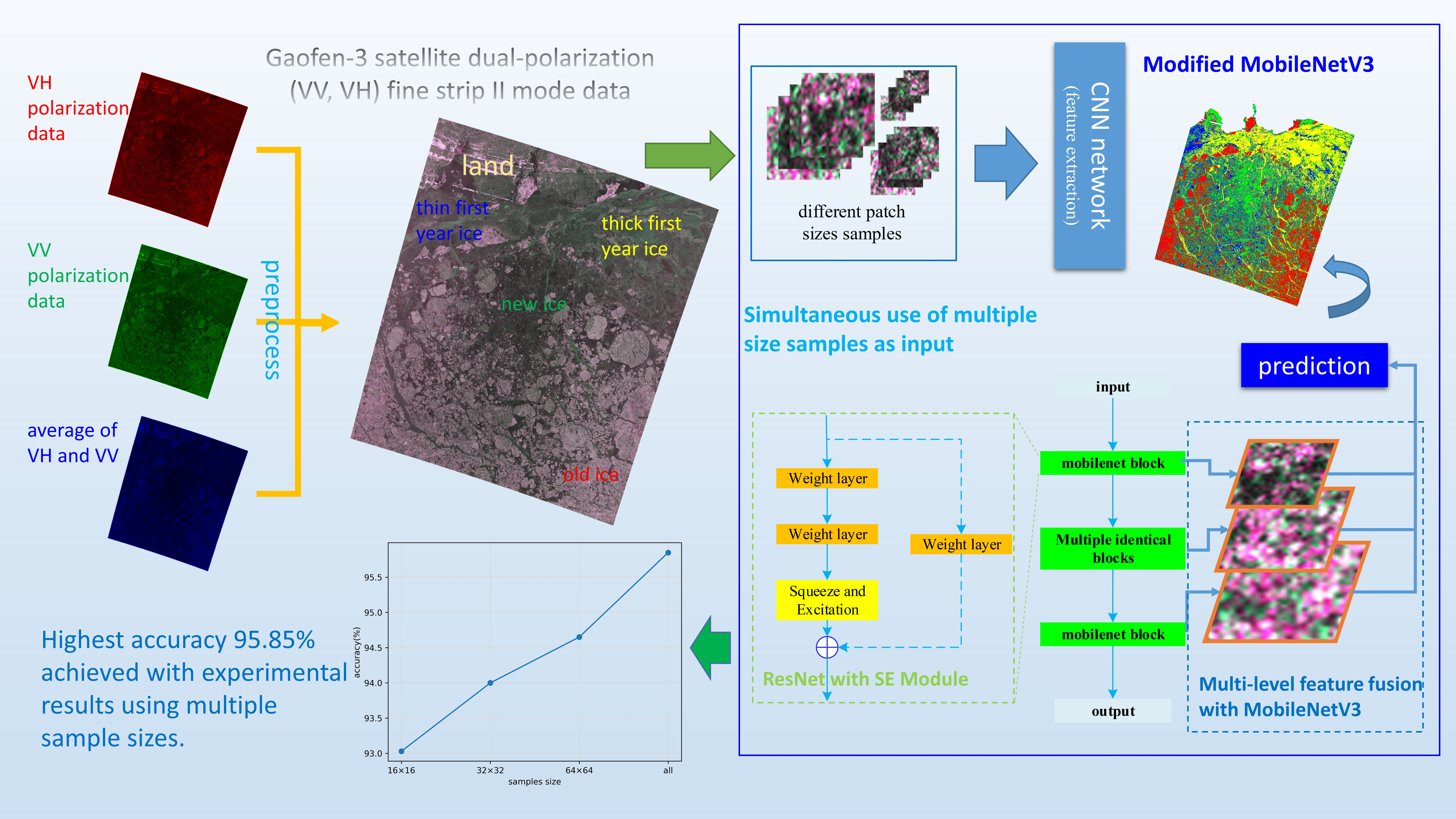
3. Methodology
3.1. MSMN Structure
3.2. Evaluation Methodology
4. Experimental Results and Evaluation
4.1. Classification Results Using Different Patch Sizes
4.2. Classification Results Using Different Polarization Data
4.3. Classification Results of Different Classification Algorithms
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Maslanik, J.; Stroeve, J.; Fowler, C.; Emery, W. Distribution and trends in Arctic sea ice age through spring 2011. Geophys. Res. Lett. 2011, 38, 38. [Google Scholar] [CrossRef]
- Serreze, M.C.; Stroeve, J.C. Arctic sea ice trends, variability and implications for seasonal ice forecasting. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140159. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peterson, I.K.; Prinsenberg, S.J.; Holladay, J.S. Observations of sea ice thickness, surface roughness and ice motion in Amundsen Gulf. J. Geophys. Res. 2008, 113, C06016. [Google Scholar] [CrossRef]
- Shi, L.; Liu, S.; Shi, Y.; Ao, X.; Zou, B.; Wang, Q. Sea Ice Concentration Products over Polar Regions with Chinese FY3C/MWRI Data. Remote Sens. 2021, 13, 2174. [Google Scholar] [CrossRef]
- Joint WMO-IOC Technical Commission for Oceanography and Marine Meteorology. Ice Chart Colour Code Standard; Version 1.0; World Meteorological Organization & Intergovernmental Oceanographic Commission: Geneva, Switzerland, 2014. [Google Scholar]
- Scheuchl, B.; Flett, D.; Caves, R.; Cumming, I. Potential of RADARSAT-2 data for operational sea ice monitoring. Can. J. Remote Sens. 2004, 30, 448–461. [Google Scholar] [CrossRef]
- Dierking, W. Mapping of Different Sea Ice Regimes Using Images From Sentinel-1 and ALOS Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1045–1058. [Google Scholar] [CrossRef]
- Gill, J.P.; Yackel, J.J. Evaluation of C-band SAR polarization parameters for discrimination of first-year sea ice types. Can. J. Remote Sens. 2012, 38, 306–323. [Google Scholar] [CrossRef]
- Johansson, A.M.; Brekke, C.; Spreen, G.; King, J.A. X-, C-, and L-band SAR signatures of newly formed sea ice in Arctic leads during winter and spring. Remote Sens. Environ. 2018, 204, 162–180. [Google Scholar] [CrossRef]
- Liu, H.; Guo, H.; Zhang, L. SVM-Based Sea Ice Classification Using Textural Features and Concentration From RADARSAT-2 Dual-Pol ScanSAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1601–1613. [Google Scholar] [CrossRef]
- Haverkamp, D.; Soh, L.K.; Tsatsoulis, C. A dynamic local thresholding technique for sea ice classification. In Proceedings of the IGARSS ’93—IEEE International Geoscience and Remote Sensing Symposium, Tokyo, Japan, 18–21 August 1993; pp. 638–640. [Google Scholar] [CrossRef]
- Shokr, M.E. Evaluation of second-order texture parameters for sea ice classification from radar images. J. Geophys. Res. 1991, 96, 10625–10640. [Google Scholar] [CrossRef]
- Soh, L.; Tsatsoulis, C. Texture analysis of SAR sea ice imagery using gray level co-occurrence matrices. IEEE Trans. Geosci. Remote Sens. 1999, 37, 780–795. [Google Scholar] [CrossRef] [Green Version]
- Clausi, D.A.; Yue, B. Comparing Cooccurrence Probabilities and Markov Random Fields for Texture Analysis of SAR Sea Ice Imagery. IEEE Trans. Geosci. Remote Sens. 2004, 42, 215–228. [Google Scholar] [CrossRef]
- Dabboor, M.; Geldsetzer, T. Towards sea ice classification using simulated radarsat constellation mission compact polarization sar imagery. Remote Sens. Environ. 2014, 140, 189–195. [Google Scholar] [CrossRef]
- Ressel, R.; Singha, S.; Lehner, S.; Rösel, A.; Spreen, G. Investigation into Different Polarization Features for Sea Ice Classification Using X-Band Synthetic Aperture Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3131–3143. [Google Scholar] [CrossRef] [Green Version]
- Song, W.; Li, M.; Gao, W.; Huang, D.; Ma, Z.; Liotta, A.; Perra, C. Automatic Sea-Ice Classification of SAR Images Based on Spatial and Temporal Features Learning. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9887–9901. [Google Scholar] [CrossRef]
- Lohse, J.; Doulgeris, A.P.; Dierking, W. An Optimal Decision-Tree Design Strategy and Its Application to Sea Ice Classification from SAR Imagery. Remote Sens. 2019, 11, 1574. [Google Scholar] [CrossRef] [Green Version]
- Park, J.-W.; Korosov, A.A.; Babiker, M.; Won, J.-S.; Hansen, M.W.; Kim, H.-C. Classification of sea ice types in Sentinel-1 synthetic aperture radar images. Cryosphere 2020, 14, 2629–2645. [Google Scholar] [CrossRef]
- Li, X.-M.; Sun, Y.; Zhang, Q. Extraction of Sea Ice Cover by Sentinel-1 SAR Based on Support Vector Machine With Unsupervised Generation of Training Data. IEEE Trans. Geosci. Remote Sens. 2021, 59, 3040–3053. [Google Scholar] [CrossRef]
- Zakhvatkina, N.Y.; Alexandrov, V.Y.; Johannessen, O.M.; Sandven, S.; Frolov, I.Y. Classification of Sea Ice Types in ENVISAT Synthetic Aperture Radar Images. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2587–2600. [Google Scholar] [CrossRef]
- Boulze, H.; Korosov, A.; Brajard, J. Classification of Sea Ice Types in Sentinel-1 SAR Data Using Convolutional Neural Networks. Remote Sens. 2020, 12, 2165. [Google Scholar] [CrossRef]
- Song, W.; Li, M.; He, Q.; Huang, D.; Perra, C.; Liotta, A. A Residual Convolution Neural Network for Sea Ice Classification with Sentinel-1 SAR Imagery. In Proceedings of the 2018 IEEE International Conference on Data Mining Workshops (ICDMW), Singapore, 17–20 November 2018; pp. 795–802. [Google Scholar] [CrossRef]
- Han, Y.; Liu, Y.; Hong, Z.; Zhang, Y.; Yang, S.; Wang, J. Sea Ice Image Classification Based on Heterogeneous Data Fusion and Deep Learning. Remote Sens. 2021, 13, 592. [Google Scholar] [CrossRef]
- Zhang, T.; Yang, Y.; Shokr, M.; Mi, C.; Li, X.-M.; Cheng, X.; Hui, F. Deep Learning Based Sea Ice Classification with Gaofen-3 Fully Polarization SAR Data. Remote Sens. 2021, 13, 1452. [Google Scholar] [CrossRef]
- Zhang, Q. System Design and Key Technologies of the GF-3 Satellite. ACTA Geod. Cartogr. Sin. 2017, 46, 269–277. [Google Scholar]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S. Automatic Ship Detection Based on Retina Net Using Multi-Resolution Gaofen-3 Imagery. Remote Sens. 2019, 11, 531. [Google Scholar] [CrossRef] [Green Version]
- An, Q.; Pan, Z.; You, H. Ship Detection in Gaofen-3 SAR Images Based on Sea Clutter Distribution Analysis and Deep Convolutional Neural Network. Sensors 2018, 18, 334. [Google Scholar] [CrossRef] [Green Version]
- Dong, H.; Xu, X.; Wang, L.; Pu, F. Gaofen-3 PolSAR Image Classification via XGBoost and Polarization Spatial Information. Sensors 2018, 18, 611. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kang, W.; Xiang, Y.; Wang, F.; Wan, L.; You, H. Flood Detection in Gaofen-3 SAR Images via Fully Convolutional Networks. Sensors 2018, 18, 2915. [Google Scholar] [CrossRef] [Green Version]
- Makynen, M.; Karvonen, J. Incidence Angle Dependence of First-Year Sea Ice Backscattering Coefficient in Sentinel-1 SAR Imagery Over the Kara Sea. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6170–6181. [Google Scholar] [CrossRef]
- Lohse, J.; Doulgeris, A.P.; Dierking, W. Mapping sea-ice types from Sentinel-1 considering the surface-type dependent effect of incidence angle. Ann. Glaciol. 2020, 61, 260–270. [Google Scholar] [CrossRef]
- Zakhvatkina, N.; Smirnov, V.; Bychkova, I. Satellite SAR Data-based Sea Ice Classification: An Overview. Geosciences 2019, 9, 152. [Google Scholar] [CrossRef] [Green Version]
- Soh, L.K.; Tsatsoulis, C.; Gineris, D.; Bertoia, C. ARKTOS: An Intelligent System for SAR Sea Ice Image Classification. IEEE Trans. Geosci. Remote Sens. 2004, 42, 229–248. [Google Scholar] [CrossRef] [Green Version]
- Khaleghian, S.; Ullah, H.; Kræmer, T.; Hughes, N.; Eltoft, T.; Marinoni, A. Sea Ice Classification of SAR Imagery Based on Convolution Neural Networks. Remote Sens. 2021, 13, 1734. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, H.; Wang, Y.; Zhang, B. Sea Ice Classification with Convolutional Neural Networks Using Sentinel-L Scansar Images. In Proceedings of the IGARSS 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 7125–7128. [Google Scholar] [CrossRef]
- Howard, A.; Sandler, M.; Chu, G.; Chen, L.C.; Chen, B.; Tan, M.; Wang, W.; Zhu, Y.; Pang, R.; Vasudevan, V.; et al. Searching for MobileNetV3. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 20–26 October 2019; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2019; pp. 1314–1324. [Google Scholar] [CrossRef]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 936–944. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Id | Date | Time | Near Inc. Angle (°) | Far Inc. Angle (°) | Resolution (R × A) | Use |
|---|---|---|---|---|---|---|
| 1 | 3 January 2020 | 02:49:28 | 31.34 | 37.97 | 2.25 × 4.77 | train |
| 2 | 4 January 2020 | 13:56:53 | 31.35 | 38.01 | 2.25 × 4.77 | test |
| 3 | 6 January 2020 | 14:14:12 | 31.35 | 38.13 | 2.25 × 4.78 | train |
| 4 | 7 January 2020 | 13:33:50 | 31.35 | 38.06 | 2.25 × 4.78 | test |
| 5 | 8 January 2020 | 02:42:28 | 31.34 | 37.92 | 2.25 × 4.77 | train |
| 6 | 8 January 2020 | 02:42:38 | 31.34 | 37.91 | 2.25 × 4.77 | train |
| 7 | 10 January 2020 | 13:08:53 | 31.34 | 38.10 | 2.25 × 4.78 | train |
| 8 | 11 January 2020 | 14:05:54 | 42.62 | 47.60 | 2.25 × 4.84 | train |
| 9 | 11 January 2020 | 14:06:09 | 42.62 | 47.60 | 2.25 × 4.84 | train |
| 10 | 11 January 2020 | 14:06:41 | 42.61 | 47.62 | 2.25 × 4.84 | train |
| 11 | 11 January 2020 | 14:07:43 | 42.61 | 47.65 | 2.25 × 4.84 | train |
| 12 | 19 January 2020 | 15:15:06 | 31.35 | 38.23 | 2.25 × 4.79 | train |
| 13 | 19 January 2020 | 15:15:57 | 31.36 | 38.23 | 2.25 × 4.79 | train |
| 14 | 19 January 2020 | 15:16:31 | 31.39 | 38.23 | 2.25 × 4.79 | train |
| 15 | 19 January 2020 | 15:16:53 | 31.41 | 38.23 | 2.25 × 4.79 | train |
| 16 | 27 January 2020 | 14:45:17 | 31.35 | 37.96 | 2.25 × 4.77 | train |
| 17 | 13 February 2020 | 16:22:47 | 31.34 | 38.08 | 2.25 × 4.78 | train |
| 18 | 21 February 2020 | 15:52:07 | 31.34 | 38.07 | 2.25 × 4.78 | train |
| 19 | 22 February 2020 | 13:30:33 | 31.35 | 38.02 | 2.25 × 4.78 | test |
| Region | NI | TI | tI | OI |
|---|---|---|---|---|
| Scene 2 | 970 | 944 | 916 | 996 |
| Scene 4 | 952 | 974 | 966 | 906 |
| Scene 19 | 1000 | 1000 | 1000 | 1000 |
| Parameter | Value |
|---|---|
| Learning rate | 0.01 |
| Decay | 0.00004 |
| Batch size | 64 |
| L2 regularization coefficient γ | 0.1 |
| Patch Size | Ice Type | NI | TI | tI | OI | Prec (%) | Accu (%) | Kappa (%) |
|---|---|---|---|---|---|---|---|---|
| 16 × 16 | NI | 981 | 9 | 10 | 0 | 98.10 | 93.03 | 90.70 |
| TI | 34 | 872 | 91 | 3 | 87.20 | |||
| tI | 23 | 23 | 916 | 38 | 91.60 | |||
| OI | 0 | 1 | 47 | 952 | 95.20 | |||
| 32 × 32 | NI | 977 | 12 | 11 | 0 | 97.70 | 94.00 | 92.00 |
| TI | 20 | 884 | 93 | 3 | 88.40 | |||
| tI | 14 | 16 | 921 | 49 | 92.10 | |||
| OI | 0 | 0 | 22 | 978 | 97.80 | |||
| 64 × 64 | NI | 984 | 10 | 6 | 0 | 98.40 | 94.65 | 92.87 |
| TI | 24 | 933 | 43 | 0 | 93.30 | |||
| tI | 25 | 34 | 901 | 40 | 90.10 | |||
| OI | 0 | 1 | 31 | 986 | 98.60 | |||
| MSMN | NI | 983 | 1 | 16 | 0 | 98.30 | 95.85 | 94.47 |
| TI | 19 | 927 | 52 | 2 | 92.70 | |||
| tI | 11 | 8 | 935 | 46 | 93.50 | |||
| OI | 0 | 4 | 17 | 989 | 98.90 |
| Data | Ice Type | NI | TI | tI | OI | Prec (%) | Accu (%) | Kappa (%) |
|---|---|---|---|---|---|---|---|---|
| VH | NI | 678 | 320 | 2 | 0 | 67.80 | 85.80 | 80.84 |
| TI | 46 | 924 | 28 | 2 | 92.40 | |||
| tI | 56 | 24 | 858 | 70 | 85.80 | |||
| OI | 4 | 0 | 24 | 972 | 97.20 | |||
| VV | NI | 992 | 8 | 0 | 0 | 99.20 | 86.50 | 82.00 |
| TI | 32 | 842 | 64 | 62 | 84.20 | |||
| tI | 48 | 172 | 680 | 108 | 68.00 | |||
| OI | 2 | 22 | 30 | 946 | 94.60 | |||
| VH + VV | NI | 983 | 1 | 16 | 0 | 98.30 | 95.85 | 94.47 |
| TI | 19 | 927 | 52 | 2 | 92.70 | |||
| tI | 11 | 8 | 935 | 46 | 93.50 | |||
| OI | 0 | 4 | 17 | 989 | 98.90 |
| Region | Method | Ice Type | NI | TI | tI | OI | Prec (%) | Accu (%) | Kappa (%) |
|---|---|---|---|---|---|---|---|---|---|
| Scene 2 | SCNN | NI | 855 | 101 | 14 | 0 | 88.14 | 90.17 | 86.90 |
| TI | 0 | 810 | 127 | 7 | 85.81 | ||||
| tI | 0 | 51 | 835 | 30 | 91.16 | ||||
| OI | 0 | 0 | 46 | 950 | 95.38 | ||||
| ResNet18 | NI | 963 | 6 | 1 | 0 | 99.28 | 94.04 | 92.05 | |
| TI | 39 | 866 | 36 | 3 | 91.74 | ||||
| tI | 22 | 42 | 803 | 49 | 87.66 | ||||
| OI | 0 | 4 | 26 | 966 | 96.99 | ||||
| MSMN | NI | 961 | 3 | 6 | 0 | 99.07 | 95.66 | 94.21 | |
| TI | 22 | 885 | 35 | 2 | 93.75 | ||||
| tI | 4 | 33 | 844 | 35 | 92.14 | ||||
| OI | 0 | 3 | 23 | 970 | 97.39 | ||||
| Scene 4 | SCNN | NI | 872 | 65 | 15 | 0 | 91.60 | 91.10 | 88.13 |
| TI | 0 | 851 | 122 | 1 | 87.37 | ||||
| tI | 2 | 42 | 889 | 33 | 92.03 | ||||
| OI | 3 | 0 | 55 | 848 | 93.60 | ||||
| ResNet18 | NI | 949 | 2 | 1 | 0 | 99.68 | 94.18 | 92.24 | |
| TI | 50 | 865 | 59 | 0 | 88.81 | ||||
| tI | 12 | 31 | 872 | 51 | 90.27 | ||||
| OI | 0 | 3 | 19 | 664 | 98.34 | ||||
| MSMN | NI | 930 | 7 | 15 | 0 | 97.69 | 95.37 | 93.82 | |
| TI | 18 | 902 | 52 | 2 | 92.61 | ||||
| tI | 13 | 22 | 905 | 26 | 93.69 | ||||
| OI | 0 | 4 | 17 | 885 | 97.68 | ||||
| Scene 19 | SCNN | NI | 944 | 41 | 15 | 0 | 94.40 | 91.02 | 88.03 |
| TI | 0 | 871 | 125 | 4 | 87.10 | ||||
| tI | 2 | 47 | 898 | 53 | 89.80 | ||||
| OI | 3 | 0 | 69 | 928 | 92.80 | ||||
| ResNet18 | NI | 998 | 2 | 0 | 0 | 99.80 | 93.13 | 90.83 | |
| TI | 54 | 868 | 77 | 1 | 86.80 | ||||
| tI | 35 | 25 | 895 | 45 | 89.50 | ||||
| OI | 0 | 0 | 36 | 964 | 96.40 | ||||
| MSMN | NI | 983 | 1 | 16 | 0 | 98.30 | 95.85 | 94.47 | |
| TI | 19 | 927 | 52 | 2 | 92.70 | ||||
| tI | 11 | 8 | 935 | 46 | 93.50 | ||||
| OI | 0 | 4 | 17 | 989 | 98.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Zhang, W.; Hu, Y.; Chu, Q.; Liu, L. An Improved Sea Ice Classification Algorithm with Gaofen-3 Dual-Polarization SAR Data Based on Deep Convolutional Neural Networks. Remote Sens. 2022, 14, 906. https://doi.org/10.3390/rs14040906
Zhang J, Zhang W, Hu Y, Chu Q, Liu L. An Improved Sea Ice Classification Algorithm with Gaofen-3 Dual-Polarization SAR Data Based on Deep Convolutional Neural Networks. Remote Sensing. 2022; 14(4):906. https://doi.org/10.3390/rs14040906
Chicago/Turabian StyleZhang, Jiande, Wenyi Zhang, Yuxin Hu, Qingwei Chu, and Lei Liu. 2022. "An Improved Sea Ice Classification Algorithm with Gaofen-3 Dual-Polarization SAR Data Based on Deep Convolutional Neural Networks" Remote Sensing 14, no. 4: 906. https://doi.org/10.3390/rs14040906
APA StyleZhang, J., Zhang, W., Hu, Y., Chu, Q., & Liu, L. (2022). An Improved Sea Ice Classification Algorithm with Gaofen-3 Dual-Polarization SAR Data Based on Deep Convolutional Neural Networks. Remote Sensing, 14(4), 906. https://doi.org/10.3390/rs14040906