
The Suitability of PlanetScope Imagery for Mapping Rubber Plantations


Abstract
:1. Introduction
2. Materials and Methods
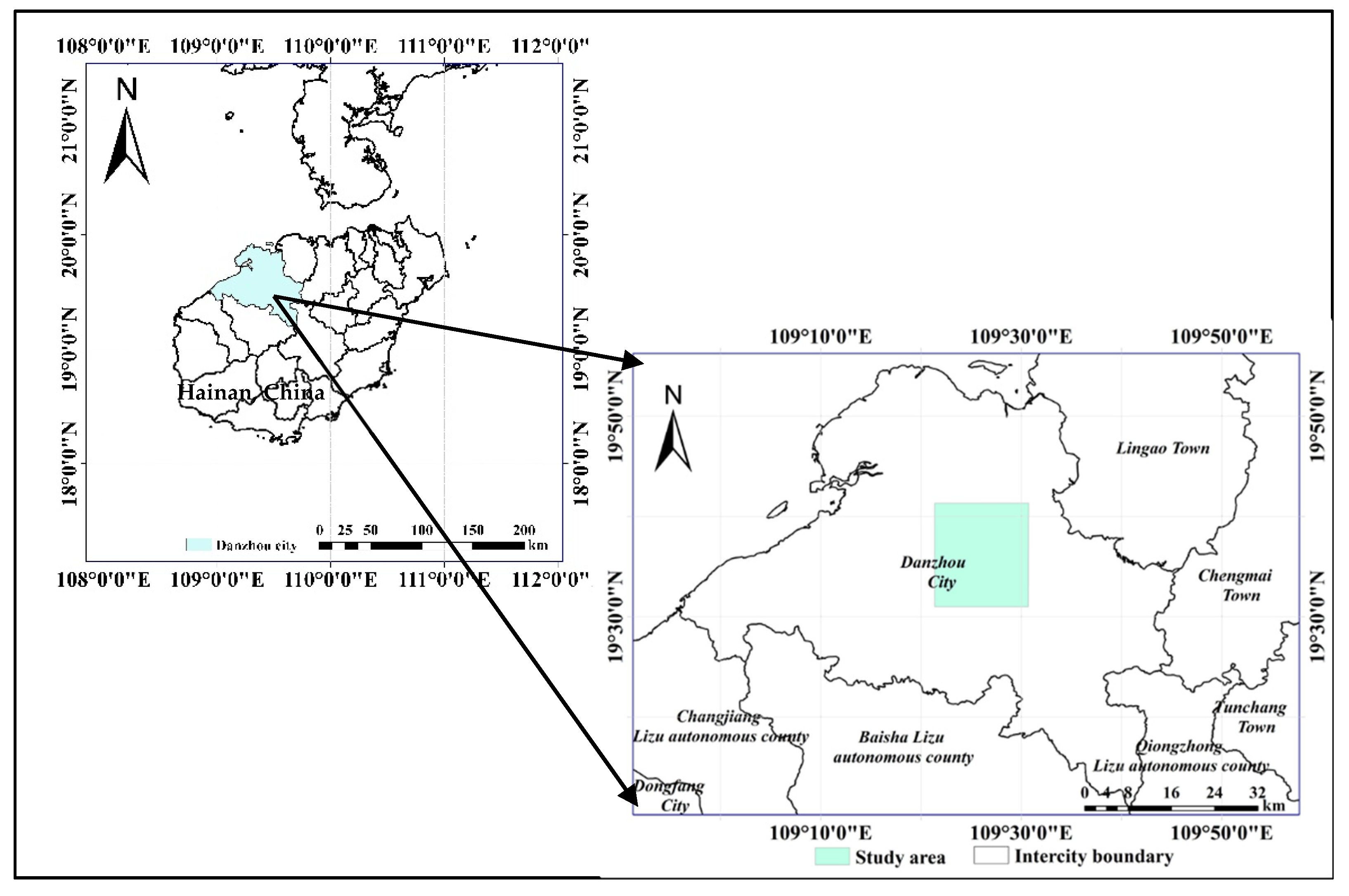
2.1. Study Area
2.2. Data
2.2.1. MODIS Data
2.2.2. PlanetScope Imagery Data
2.2.3. Ground Sample Data Collection
2.3. Segmentation
2.4. Feature Extraction
2.4.1. Spectral Features
2.4.2. Index Features
2.4.3. Textural Features
2.4.4. Optimal Feature Selection
2.5. Classification Methods
2.6. Classification Accuracy Evaluation
3. Results
3.1. Determination of the Optimal Monitoring Period for Rubber Plantations
3.2. Optimal Feature Selection
3.2.1. Optimal Pixel Feature Selection
- (1)
- Confirm the suitable texture-extraction window size for the PlanetScope images
- (2)
- Optimal pixel-based feature selection
3.2.2. Optimal Object-Based Feature Selection
3.3. Rubber Plantation Mapping and Accuracy Assessment
4. Discussion
4.1. Classification Accuracy Analysis
4.2. Research Limitations and Prospects
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Suratman, M.N.; Bull, G.Q.; Leckie, D.G.; LeMay, V.; Marshall, P.L. Modelling attributes of Rubberwood (Hevea brasiliensis) stands using spectral radiance recorded by Landsat Thematic Mapper in Malaysia. Geosci. Remote Sens. Symp. 2002, 4, 2087–2090. [Google Scholar]
- Azizan, F.A.; Kiloes, A.M.; Astuti, I.S.; Abdul Aziz, A. Application of optical remote sensing in rubber plantations: A systematic review. Remote Sens. 2021, 13, 429. [Google Scholar] [CrossRef]
- Li, Z.; Fox, J.M. Mapping rubber tree growth in mainland Southeast Asia using time-series MODIS 250 m NDVI and statistical data. Appl. Geogr. 2012, 32, 420–432. [Google Scholar] [CrossRef]
- Suratman, M.N.; Bull, G.Q.; Leckie, D.G.; Lemay, V.M.; Marshall, P.L.; Mispan, M.R. Prediction models for estimating the area, volume, and age of rubber (Hevea brasiliensis) plantations in Malaysia using Landsat TM data. Int. For. Rev. 2004, 6, 1–12. [Google Scholar] [CrossRef]
- Suratman, M.N.; Lemay, V.M.; Bull, G.Q.; Leckie, D.G.; Walsworth, N.; Marshall, P.L. Logistic regression modelling of thematic mapper data for rubber (Hevea brasiliensis) area mapping. Sci. Lett. 2005, 2, 79–85. [Google Scholar]
- Dong, J.W.; Xiao, X.M.; Chen, B.Q.; Torbick, N.; Jin, C.; Zhang, G.L.; Biradar, C. Mapping deciduous rubber plantations through integration of PALSAR and multi-temporal Landsat imagery. Remote Sens. Environ. 2013, 134, 392–402. [Google Scholar] [CrossRef]
- Liu, X.; Feng, Z.; Jiang, L. Application of decision tree classification to rubber plantations extraction with remote sensing. Trans. Chin. Soc. Agric. Eng. 2013, 29, 163–172, (In Chinese with English Abstract). [Google Scholar]
- Liao, C.; Li, P.; Feng, Z.; Zhang, J. Area monitoring by remote sensing and spatiotemporal variation of rubber plantations in Xishuangbanna. Trans. Chin. Soc. Agric. Eng. 2014, 30, 170–180, (In Chinese with English Abstract). [Google Scholar]
- Fan, H.; Fu, X.H.; Zhang, Z.; Wu, Q. Phenology-based vegetation index differencing for mapping of rubber plantations using landsat OLI data. Remote Sens. 2015, 7, 6041–6058. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Zhang, J.; Feng, Z. Mapping rubber tree plantations using a Landsat-based phenological algorithm in Xishuangbanna, Southwest China. Remote Sens. Lett. 2015, 6, 49–58. [Google Scholar] [CrossRef]
- Zhai, D.L.; Dong, J.W.; Cadisch, G.; Wang, M.C.; Kou, W.L.; Xu, J.C.; Xiao, X.M.; Abbas, S. Comparison of pixel- and object-based approaches in phenology-based rubber plantation mapping in fragmented landscapes. Remote Sens. 2018, 10, 44. [Google Scholar] [CrossRef] [Green Version]
- Ye, S.; Rogan, J.; Sangermano, F. Monitoring rubber plantation expansion using Landsat data time series and a Shapelet-based approach. ISPRS J. Photogramm. Remote Sens. 2018, 136, 134–143. [Google Scholar] [CrossRef]
- Xiao, C.W.; Li, P.; Feng, Z.M. How did deciduous rubber plantations expand spatially in China’s Xishuangbanna dai autonomous prefecture during 1991–2016? Photogramm. Eng. Remote Sens. 2019, 85, 687–697. [Google Scholar] [CrossRef]
- Xiao, C.W.; Li, P.; Feng, Z.M. Monitoring annual dynamics of mature rubber plantations in Xishuangbanna during 1987–2018 using Landsat time series data: A multiple normalization approach. Int. J. Appl. Earth Obs. Geoinf. 2019, 77, 30–41. [Google Scholar] [CrossRef]
- Xiao, C.W.; Li, P.; Feng, Z.M.; Liu, X.N. An updated delineation of stand ages of deciduous rubber plantations during 1987–2018 using Landsat-derived bi-temporal thresholds method in an anti-chronological strategy. Int. J. Appl. Earth Obs. Geoinf. 2019, 76, 40–50. [Google Scholar] [CrossRef]
- Xiao, C.W.; Li, P.; Feng, Z.M.; Liu, Y.Y.; Zhang., X.Z. Is the phenology-based algorithm for mapping deciduous rubber plantations applicable in an emerging region of northern Laos? Adv. Space Res. 2020, 65, 446–457. [Google Scholar] [CrossRef]
- Zhang, C.C.; Huang, C.; Li, H.; Liu, Q.S.; Li, J.; Bridhikitti, A.; Liu, G.H. Effect of textural features in remote sensed data on rubber plantation extraction at different levels of spatial resolution. Forests 2020, 11, 399. [Google Scholar] [CrossRef] [Green Version]
- Dibs, H.; Idrees, M.O.; Alsalhin, G.B.A. Hierarchical classification approach for mapping rubber tree growth using per-pixel and object-oriented classifiers with SPOT-5 imagery. Egypt. J. Remote Sens. Space Sci. 2017, 20, 21–30. [Google Scholar] [CrossRef]
- Chen, B.Q.; Li, X.P.; Xiao, X.M.; Zhao, B.; Dong, J.W.; Kou, W.L.; Qin, Y.W.; Yang, C.; Wu, Z.; Sun, R.; et al. Mapping tropical forests and deciduous rubber plantations in Hainan Island, China by integrating PALSAR 25-m and multi-temporal Landsat images. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 117–130. [Google Scholar] [CrossRef]
- Li, Z.; Fox, J.M. Integrating Mahalanobis typicalities with a neural network for rubber distribution mapping. Remote Sens. Lett. 2011, 2, 157–166. [Google Scholar] [CrossRef]
- Rao, D.V.N.; Jose, A.I.; Rao, A.V.R.K. Spectral signature and temporal variation in spectral reflectance: Keys to identify rubber vegetation. In Proceedings of the International Symposium on Remote Sensing, Crete, Greece, 22–25 September 2003; Volume 4879, pp. 114–124. [Google Scholar]
- Pradeep, B.; Jacob, J.; Anand, S.S.S.; Shebin, S.M.M.; Meti, S.; Annamalainathan, K. Inventory of rubber plantations and identification of potential areas for its cultivation in assam using high resolution IRS data. In Proceedings of the 38th Asian Conference on Remote Sensing, Asian Association on Remote Sensing (AARS), New Delhi, India, 23–27 October 2017; pp. 1977–1985. [Google Scholar]
- Mongkolsawat, C.; Putklang, W. Rubber tree expansion in forest reserve and paddy field across the greater mekong subregion, Northeast Thailand based on remotely sensed imagery. In Proceedings of the 33rd Asian Conference on Remote Sensing, Pattaya, Thailand, 26–30 November 2012; Volume 1, pp. 214–219. [Google Scholar]
- Xiao, C.W.; Li, P.; Feng, Z.M.; Liu, Y.Y.; Zhang, X.Z. Sentinel-2 red-edge spectral indices (RESI) suitability for mapping rubber boom in Luang Namtha Province, northern Lao PDR. Int. J. Appl. Earth Obs. Geoinf. 2020, 93, 102176. [Google Scholar] [CrossRef]
- Yang, H.W.; Tong, X.H. Distribution information extraction of rubber woods using remote sensing images with high resolution. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 411–416. [Google Scholar]
- Suratman, M.N. Applicability of Landsat TM Data for Inventorying and Monitoring Rubber (Hevea brasiliensis) Plantations in Selangor, Malaysia: Linkages to Policies. Ph.D. Thesis, The University of British Columbia, Vancouver, BC, Canada, 2003. [Google Scholar]
- Dai, S.P.; Luo, H.X.; Fang, J.H.; Cao, J.H.; Li, H.L.; Li, M.F.; Wang, L.L.; Luo, W. Object-oriented classification of rubber plantations from Landsat satellite imagery. In Proceedings of the 2014 3rd International Conference on Agro-Geoinformatics, Beijing, China, 11–14 August 2014. [Google Scholar]
- Abd Razak, J.A.M.; Shariff, A.R.; Ahmad, N.; Sameen, M.I. Mapping rubber trees based on phenological analysis of Landsat time series data-sets. Geocarto Int. 2018, 33, 627–650. [Google Scholar]
- Skakun, S.; Kalecinski, N.I.; Brown, M.; Johnson, D.; Vermote, E.; Roger, J.-C.; Franch, B. Assessing within-field corn and soybean yield variability from worldview-3, planet, sentinel-2, and Landsat 8 satellite imagery. Remote Sens. 2021, 13, 872. [Google Scholar] [CrossRef]
- Kimm, H.; Guan, K.; Jiang, C.; Peng, B.; Gentry, L.F.; Wilkin, S.C.; Wang, S.; Cai, Y.; Bernacchi, C.J.; Peng, J.; et al. Deriving high-spatiotemporal-resolution leaf area index for agroecosystems in the US Corn Belt using Planet Labs CubeSat and STAIR fusion data. Remote Sens. Environ. 2020, 239, 111615. [Google Scholar] [CrossRef]
- Gargiulo, J.; Clark, C.; Lyons, N.; De Veyrac, G.; Beale, P.; Garcia, S. Spatial and temporal pasture biomass estimation integrating electronic plate meter, planet cubesats and sentinel-2 satellite data. Remote Sens. 2020, 12, 3222. [Google Scholar] [CrossRef]
- Csillik, O.; Kumar, P.; Asner, G.P. Challenges in estimating tropical forest canopy height from planet dove imagery. Remote Sens. 2020, 12, 1160. [Google Scholar] [CrossRef] [Green Version]
- Hainan Provincial Bureau of Statistics; Survey Office of National Bureau of Statistics in Hainan. Hainan Statistical Yearbook 2021; China Statistics Press: Beijing, China, 2021; p. 286. [Google Scholar]
- Baatz, M.; Schäpe, M. Multiresolution segmentation—An optimization approach for high quality multi-scale image segmentation. In Angewandte Geographische Informations-Verarbeitung XII; Beiträge zum AGIT-Symposium Salzburg: Karlsruhe, Germany, 2000; pp. 12–23. [Google Scholar]
- Rouse, J.W.; Haas, R.H.; Scheel, J.A.; Deering, D.W. Monitoring vegetation systems in the great plains with ERTS. In Proceedings of the Third Earth Resource Technology Satellite (ERTS) Symposium, Washington, DC, USA, 10–14 December 1974. [Google Scholar]
- Huete, A.R.; Liu, H.Q.; Batchily, K.; van Leeuwen, W. A comparison of vegetation indices over a global set of TM images for EOS-MODIS. Remote Sens. Environ. 1997, 59, 440–451. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of leaf area index from quality of light on the forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.M.; Cheng, C.H.; Chen, R.K. Changes in spectral characteristics of rice canopy infested with brown planthopper and leaffolder. Crop Sci. 2007, 47, 329–335. [Google Scholar] [CrossRef]
- Chen, J.M. Evaluation of vegetation indices and a modified simple ratio for boreal applications. Can. J. Remote Sens. 1996, 22, 229–242. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Keydan, G.P.; Merzlyak, M.N. Three-band model for noninvasive estimation of chlorophyll, carotenoids, and anthocyanin contents in higher plant leaves. Geophys. Res. Lett. 2006, 33, L11402. [Google Scholar] [CrossRef] [Green Version]
- Pearson, R.L.; Miller, L.D. Remote mapping of standing crop biomass for estimation of the productivity of the shortgrass prairie. In Proceedings of the English International Symposiumon on Remote Sensing of Enviroment, Ann Arbor, MI, USA, 2–6 October 1972. [Google Scholar]
- Broge, N.H.; Leblanc, E. Comparing prediction power and stability of broadband and hyperspectral vegetation indices for estimation of green leaf area index and canopy chlorophyll density. Remote Sens. Environ. 2000, 76, 156–172. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Howley, T.; Madden, M.G.; O’Connell, M.L.; Ryder, A.G. The effect of principal component analysis on machine learning accuracy with high dimensional spectral data. In Proceedings of the International Conference on Innovative Techniques and Applications of Artificial Intelligence, Cambridge, UK, 12–14 December 2005. [Google Scholar]
- Haraclick, R. Texture features for image classification. Stud. Media Commun. 1973, 3, 610–621. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Chen, B.Q.; Xiao, X.M.; Wu, Z.X.; Yun, T.; Kou, W.; Ye, H.; Lin, Q.; Doughty, R.; Dong, J.; Ma, J.; et al. Identifying establishment year and pre-conversion land cover of rubber plantations on Hainan Island, China using Landsat data during 1987–2015. Remote Sens. 2018, 10, 1240. [Google Scholar] [CrossRef] [Green Version]
- Kou, W.; Dong, J.W.; Xiao, X.M.; Hernandez, A.J.; Qin, Y.; Zhang, G.; Chen, B.; Lu, N.; Doughty, R. Expansion dynamics of deciduous rubber plantations in Xishuangbanna, China during 2000–2010. GISci. Remote Sens. 2018, 55, 905–925. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Orbit | International Space Station’s orbit Sun-synchronous orbit | Orbit Altitude | 400 km 475 km |
| Orbit inclination | 52° 98° | Sensor type | Bayer filter charge-coupled device (CCD) camera |
| Spatial resolution | 3~4 m | Breadth | 24.6 km × 16.4 km |
| Spectral band | Band 1: blue (455–515 nm) Band 2: green (500–590 nm) Band 3: red (590–670 nm) Band 4: near-infrared (780–860 nm) |
| Training Samples | Validation Samples | Total | |
|---|---|---|---|
| Water | 53 | 26 | 79 |
| Building | 71 | 35 | 106 |
| Rubber | 167 | 83 | 250 |
| Farmland | 125 | 62 | 187 |
| Forest | 110 | 55 | 165 |
| Total | 526 | 261 | 787 |
| Index | Formulation | Reference |
|---|---|---|
| NDVI (normalized difference vegetation index) | [35] | |
| EVI (enhanced vegetation index) | [36] | |
| DVI (difference vegetation index) | [37] | |
| GDVI (green difference vegetation index) | [38] | |
| GNDVI (green normalized difference vegetation index) | [39] | |
| MSR (modified simple ratio) | [40] | |
| CI (chlorophyll index) | [41] | |
| RVI (ratio vegetation index) | [42] | |
| TVI (triangular vegetation index) | [43] | |
| SAVI (soil-adjusted vegetation index) | [44] | |
| OSAVI (optimized soil adjusted vegetation index) | [45] |
| Type | RF Classification | SVM Classification | ||
|---|---|---|---|---|
| Producer’s Accuracy | User’s Accuracy | Producer’s Accuracy | User’s Accuracy | |
| Water | 100.00% | 96.30% | 100.00% | 100.00% |
| Building | 85.71% | 100.00% | 88.57% | 93.94% |
| Rubber | 87.95% | 91.25% | 91.57% | 93.83% |
| Farmland | 95.16% | 88.06% | 95.16% | 90.77% |
| Forest | 85.45% | 82.46% | 89.09% | 87.050% |
| Overall accuracy | 90.04% | 92.34% | ||
| KIA | 0.87 | 0.90 | ||
| Type | RF Classification | SVM Classification | ||
|---|---|---|---|---|
| Producer’s Accuracy | User’s Accuracy | Producer’s Accuracy | User’s Accuracy | |
| Water | 100.00% | 96.30% | 96.15% | 96.15% |
| Building | 94.29% | 94.29% | 88.57% | 96.88% |
| Rubber | 95.18% | 95.18% | 95.18% | 95.18% |
| Farmland | 95.16% | 92.19% | 98.39% | 91.04% |
| Forest | 87.27% | 92.31% | 89.09% | 92.45% |
| Overall accuracy | 93.87% | 93.87% | ||
| KIA | 0.92 | 0.92 | ||
| RF (6) | RF (19) | RF (26) | SVM (6) | SVM (19) | SVM (26) | |
|---|---|---|---|---|---|---|
| Overall accuracy | 90.42% | 90.80% | 90.04% | 88.12% | 90.42% | 92.34% |
| KIA | 0.88 | 0.88 | 0.87 | 0.85 | 0.88 | 0.90 |
| Producer’s accuracy | 87.95% | 87.95% | 87.95% | 87.95% | 87.95% | 91.57% |
| User’s accuracy | 91.25% | 91.25% | 91.25% | 91.25% | 93.59% | 93.83% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, B.; Huang, W.; Ye, H.; Chen, Q. The Suitability of PlanetScope Imagery for Mapping Rubber Plantations. Remote Sens. 2022, 14, 1061. https://doi.org/10.3390/rs14051061
Cui B, Huang W, Ye H, Chen Q. The Suitability of PlanetScope Imagery for Mapping Rubber Plantations. Remote Sensing. 2022; 14(5):1061. https://doi.org/10.3390/rs14051061
Chicago/Turabian StyleCui, Bei, Wenjiang Huang, Huichun Ye, and Quanxi Chen. 2022. "The Suitability of PlanetScope Imagery for Mapping Rubber Plantations" Remote Sensing 14, no. 5: 1061. https://doi.org/10.3390/rs14051061
APA StyleCui, B., Huang, W., Ye, H., & Chen, Q. (2022). The Suitability of PlanetScope Imagery for Mapping Rubber Plantations. Remote Sensing, 14(5), 1061. https://doi.org/10.3390/rs14051061