
Individual Tree Crown Delineation Method Based on Multi-Criteria Graph Using Geometric and Spectral Information: Application to Several Temperate Forest Sites



Abstract
:1. Introduction
2. Materials and Method
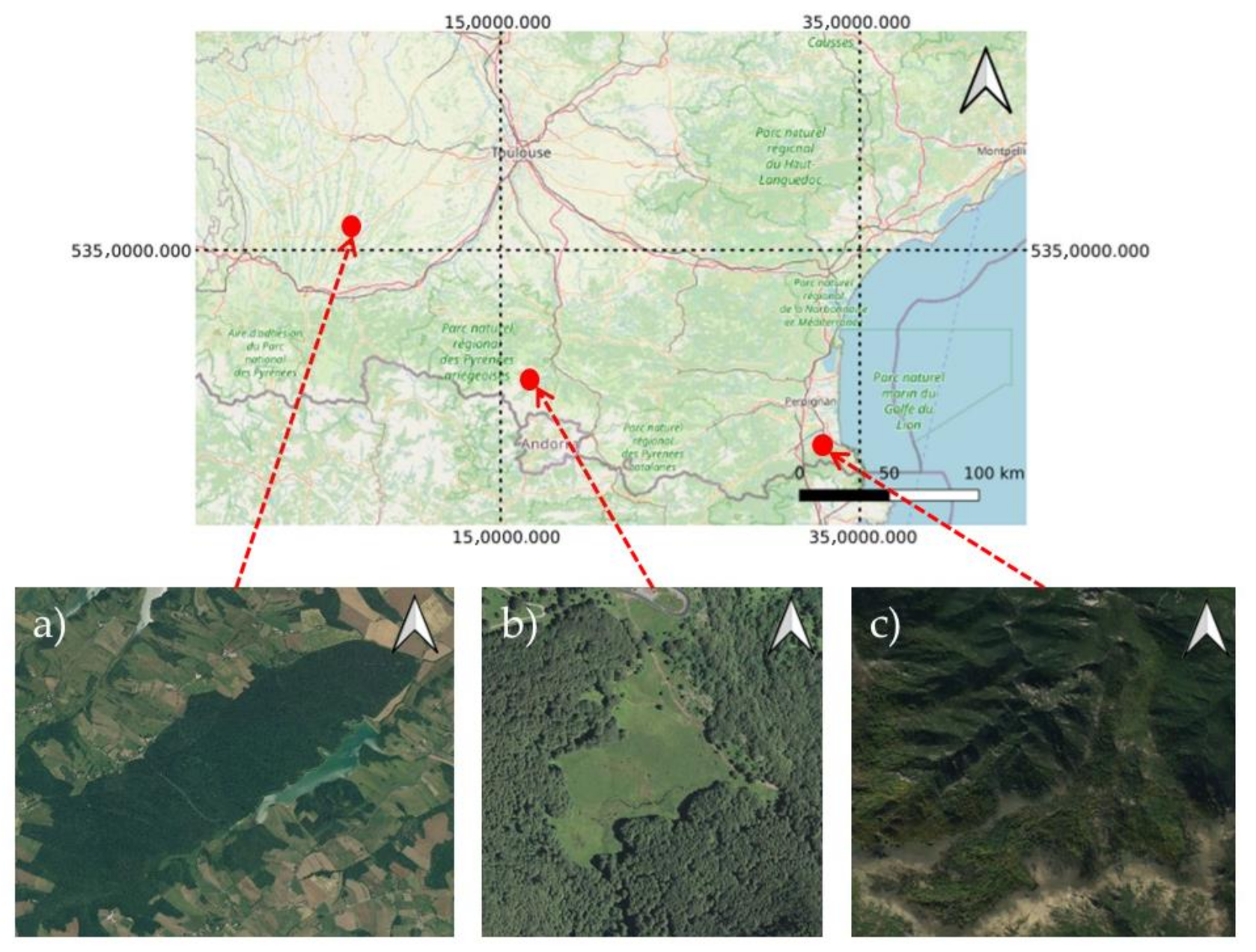
2.1. Study Sites
2.2. Data Acquisition and Preprocessing
2.3. Training and Testing Datasets
- The maximum heights in La Massane forest are relatively shorter than at the two other sites,
- Two modes were identified in the radius histogram for Fabas forest, corresponding to coniferous and broadleaf species.
2.4. MCG-Tree Method
- During preprocessing, to mask the shadowed pixels;
- During graph processing, to merge segments belonging to the same tree;
- During post-processing, to classify the tree type to adapt the geometric criteria.
2.4.1. Preprocessing
- RGB bands at 480, 550 and 670 nm, a standard combination that is often accessible by passive optical remote sensing.
2.4.2. Initial Segmentation (Reference Map)
2.4.3. Graph Generation and Parameter Computation
- Difference in height between the maximum heights of two adjacent nodes (∆hmax);
- Planar Euclidian distance between the maximum heights of two adjacent nodes (dhmax);
- Local variation in height corresponding to the difference in height between the maximum and minimum values on a transect connecting the maximum heights of two adjacent nodes (∆hloc),
- Euclidian distance between mean spectral values of two adjacent segments (∆spec).
2.4.4. Segment Clustering
- Variations in tree height in the forest canopy were used to set the ∆hmax and ∆hloc intervals;
- The overall shape of the tree crown defined the dhmax interval;
- Spectral variation among tree types was used to set the ∆spec interval.
2.4.5. Automatic Adaptation of the MCG-Tree Method According to the Type of Tree
2.5. Performance Assessment
- Matched—The reference ITC recovered more than 50% of a segment and this segment recovered more than 50% of the validation ITC;
- Missed—The reference ITC did not recover more than 50% of any segment;
- Over-segmented—The reference ITC recovered more than 50% of several segments;
- Under-segmented—A segment recovered more than 50% of the reference ITC but the reference ITC did not recover more than 50% of the segment.
3. Results
3.1. Calibration Step
3.1.1. Optimal Input Parameter Values
Shadow Mask Threshold
CHM Median Filter Size
- For the coniferous type, with a 2 × 2 window size;
- For the broadleaf type, with a 4 × 4 window size;
- For all trees, with a 3 × 3 window size.
Single-Criterion Analysis
Multiple-Criterion Analysis (Vote Assessment)
3.1.2. Calibration According to Tree Type
Range of Input Parameters According to Tree Type
Automatic Adaptation of MCG-Tree Method
3.2. Performance of the MCG-Tree Method
4. Discussion
4.1. Benefit of Spectral Information for Tree Crown Delineation
4.2. Advantage of Geometric Information for Tree Crown Delineation
4.3. Automatic Adaptation in the Case of a Mixed Forest
4.4. MCG-Tree Adaptability to Multi-Sites
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- European Environment Agency rapport on Forest Dynamics in Europe and their Ecological Consequences. Available online: https://www.eea.europa.eu/themes/biodiversity/forests (accessed on 27 October 2021).
- Brown, S.; Sathaye, J.; Cannell, M.; Kauppi, P. Mitigation of carbon emissions to the atmosphere by forest management. Commonw. For. Rev. 1996, 75, 80–91. [Google Scholar]
- Beguin, J.; Tremblay, J.P.; Thiffault, N.; Pothier, D.; Côté, S. Management of forest regeneration in boreal and temperate deer–forest systems: Challenges, guidelines, and research gaps. Ecosphere 2016, 7, e01488. [Google Scholar] [CrossRef]
- IGN Study of Forest Wood Availability in Occitanie Region. Available online: https://inventaire-forestier.ign.fr/IMG/pdf/rapport_occitanie_phase_i.pdf (accessed on 27 October 2021).
- Reddy, C.S.; Kurian, A.; Srivastava, G.; Singhal, J.; Varghese, A.O.; Padalia, H.; Rao, P.V.N. Remote sensing enabled essential biodiversity variables for biodiversity assessment and monitoring: Technological advancement and potentials. Biodivers. Conserv. 2020, 30, 1–14. [Google Scholar] [CrossRef]
- Pereira, H.M.; Ferrier, S.; Walters, M.; Geller, G.N.; Jongman, R.H.G.; Scholes, R.J.; Wegmann, M. Essential biodiversity variables. Science 2013, 339, 277–278. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dobbertin, M. Tree growth as indicator of tree vitality and of tree reaction to environmental stress: A review. Eur. J. For. Res. 2005, 124, 319–333. [Google Scholar] [CrossRef]
- Achard, F.; Hansen, M.C. Global Forest Monitoring from Earth Observation; Taylor & Francis: Abingdon-on-Thames, UK, 2012. [Google Scholar]
- Skidmore, A.K.; Coops, N.C.; Neinavaz, E.; Ali, A.; Schaepman, M.E.; Paganini, M.; Wingate, V. Priority list of biodiversity metrics to observe from space. Nat. Ecol. Evol. 2021, 5, 896–906. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Ke, Y.; Quackenbush, L.J.; Zhang, L. Using error-in-variable regression to predict tree diameter and crown width from remotely sensed imagery. Can. J. For. Res. 2010, 40, 1095–1108. [Google Scholar] [CrossRef]
- Heinzel, J.; Koch, B. Investigating multiple data sources for tree species classification in temperate forest and use for single tree delineation. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 101–110. [Google Scholar] [CrossRef]
- Maltamo, M.; Næsset, E.; Vauhkonen, J. Forestry applications of airborne laser scanning. Concepts Case Stud. Manag. Ecosys 2014, 27, 2014. [Google Scholar]
- Lechner, A.M.; Foody, G.M.; Boyd, D.S. Applications in remote sensing to forest ecology and management. One Earth 2020, 2, 405–412. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. LiDAR remote sensing of forest structure. Prog. Phys. Geogr. 2003, 27, 88–106. [Google Scholar] [CrossRef] [Green Version]
- Lindberg, E.; Holmgren, J. Individual tree crown methods for 3D data from remote sensing. Curr. For. Rep. 2017, 3, 19–31. [Google Scholar] [CrossRef] [Green Version]
- Zhen, Z.; Quackenbush, L.J.; Zhang, L. Trends in automatic individual tree crown detection and delineation—Evolution of LiDAR data. Remote Sens. 2016, 8, 333. [Google Scholar] [CrossRef] [Green Version]
- Hanapi, S.S.; Shukor, S.A.A.; Johari, J. A Review on Remote Sensing-based Method for Tree Detection and Delineation. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 705, p. 012024. [Google Scholar]
- Hastings, J.H.; Ollinger, S.V.; Ouimette, A.P.; Sanders-DeMott, R.; Palace, M.W.; Ducey, M.J.; Orwig, D.A. Tree species traits determine the success of LiDAR-based crown mapping in a mixed temperate forest. Remote Sens. 2020, 12, 309. [Google Scholar] [CrossRef] [Green Version]
- Morsdorf, F.; Meier, E.; Allgöwer, B.; Nüesch, D. Clustering in airborne laser scanning raw data for segmentation of single trees. International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2003, 34, W13. [Google Scholar]
- Chen, Q.; Wang, X.; Hang, M.; Li, J. Research on the improvement of single tree segmentation algorithm based on airborne LiDAR point cloud. Open Geosci. 2021, 13, 705–716. [Google Scholar] [CrossRef]
- Mongus, D.; Žalik, B. An efficient approach to 3D single tree-crown delineation in LiDAR data. ISPRS J. Photogramm. Remote Sens. 2015, 108, 219–233. [Google Scholar] [CrossRef]
- Xiao, W.; Zaforemska, A.; Smigaj, M.; Wang, Y.; Gaulton, R. Mean shift segmentation assessment for individual forest tree delineation from airborne lidar data. Remote Sens. 2019, 11, 1263. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Chen, W.; Xu, W. Adaptive Mean Shift-Based Identification of Individual Trees Using Airborne LiDAR Data. Remote Sens. 2017, 9, 148. [Google Scholar] [CrossRef] [Green Version]
- Ferraz, A.; Bretar, F.; Jacquemoud, S.; Gonçalves, G.; Pereira, L.; Tomé, M.; Soares, P. 3-D mapping of a multi-layered Mediterranean forest using ALS data. Remote Sens. Environ. 2012, 121, 210–223. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the lidar point cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef] [Green Version]
- Barnes, C.; Balzter, H.; Barrett, K.; Eddy, J.; Milner, S.; Suárez, J.C. Individual tree crown delineation from airborne laser scanning for diseased larch forest stands. Remote Sens. 2017, 9, 231. [Google Scholar] [CrossRef] [Green Version]
- Wan Mohd Jaafar, W.S.; Woodhouse, I.H.; Silva, C.A.; Omar, H.; Abdul Maulud, K.N.; Hudak, A.T.; Mohan, M. Improving individual tree crown delineation and attributes estimation of tropical forests using airborne LiDAR data. Forests 2018, 9, 759. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Sohn, G.; Brédif, M. A hybrid framework for single tree detection from airborne laser scanning data: A case study in temperate mature coniferous forests in Ontario, Canada. ISPRS J. Photogramm. Remote Sens. 2014, 98, 44–57. [Google Scholar] [CrossRef] [Green Version]
- Zhen, Z.; Quackenbush, L.J.; Stehman, S.V.; Zhang, L. Agent-based region growing for individual tree crown delineation from airborne laser scanning (ALS) data. Int. J. Remote Sens. 2015, 36, 1965–1993. [Google Scholar] [CrossRef]
- Jakubowski, M.K.; Li, W.; Guo, Q.; Kelly, M. Delineating individual trees from LiDAR data: A comparison of vector-and raster-based segmentation approaches. Remote Sens. 2013, 5, 4163–4186. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Coomes, D.; Schonlieb, C.B.; Cai, X.; Lellmann, J.; Dalponte, M.; Morecroft, M. A graph cut approach to 3D tree delineation, using integrated airborne LiDAR and hyperspectral imagery. arXiv 2017, arXiv:1701.06715. [Google Scholar]
- Ma, Z.; Pang, Y.; Wang, D.; Liang, X.; Chen, B.; Lu, H.; Koch, B. Individual tree crown segmentation of a larch plantation using airborne laser scanning data based on region growing and canopy morphology features. Remote Sens. 2020, 12, 1078. [Google Scholar] [CrossRef] [Green Version]
- Haralick, R.M.; Sternberg, S.R.; Zhuang, X. Image analysis using mathematical morphology. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 4, 532–550. [Google Scholar] [CrossRef]
- Yao, W.; Krzystek, P.; Heurich, M. Tree species classification and estimation of stem volume and DBH based on single tree extraction by exploiting airborne full-waveform LiDAR data. Remote Sens. Environ. 2012, 123, 368–380. [Google Scholar] [CrossRef]
- Dalponte, M.; Frizzera, L.; Gianelle, D. Individual tree crown delineation and tree species classification with hyperspectral and LiDAR data. PeerJ 2019, 6, e6227. [Google Scholar] [CrossRef] [PubMed]
- Bunting, P.; Lucas, R. The delineation of tree crowns in Australian mixed species forests using hyperspectral Compact Airborne Spectrographic Imager (CASI) data. Remote Sens. Environ. 2006, 101, 230–248. [Google Scholar] [CrossRef]
- Maschler, J.; Atzberger, C.; Immitzer, M. Individual tree crown segmentation and classification of 13 tree species using airborne hyperspectral data. Remote Sens. 2018, 10, 1218. [Google Scholar] [CrossRef] [Green Version]
- Wu, B.; Yu, B.; Wu, Q.; Huang, Y.; Chen, Z.; Wu, J. Individual tree crown delineation using localized contour tree method and airborne LiDAR data in coniferous forests. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 82–94. [Google Scholar] [CrossRef]
- Erudel. Caractérisation de la Biodiversité Végétale et des Impacts Anthropiques en Milieu Montagneux par Télédétection: Apport des Données Aéroportées à Très haute Résolution Spatiale et Spectrale. Ph.D. Thesis, Onera-Geode Labex DRIIHM, Toulouse, France, 2018.
- Ouin, A.; Andrieu, E.; Vialatte, A.; Balent, G.; Barbaro, L.; Blanco, J.; Sirami, C. Building a shared vision of the future for multifunctional agricultural landscapes. Lessons from a long term socio-ecological research site in south-western France. In Advances in Ecological Research; Academic Press: Cambridge, MA, USA, 2022; Volume 65, pp. 57–106. [Google Scholar]
- Natural Reserve of Massane Forest Website. Available online: www.rnnmassane.fr (accessed on 16 July 2021).
- BD ORTHO® IGN Website. Available online: https://geoservices.ign.fr/bdortho (accessed on 2 February 2022).
- Dupuy, S.; Lainé, G.; Tassin, J.; Sarrailh, J.M. Characterization of the horizontal structure of the tropical forest canopy using object-based LiDAR and multispectral image analysis. Int. J. Appl. Earth Obs. Geoinf. 2013, 25, 76–86. [Google Scholar] [CrossRef]
- Bunting, P.; Armston, J.; Clewley, D.; Lucas, R.M. Sorted pulse data (SPD) library—Part II: A processing framework for LiDAR data from pulsed laser systems in terrestrial environments. Comput. Geosci. 2013, 56, 207–215. [Google Scholar] [CrossRef]
- Poutier, L.; Miesch, C.; Lenot, X.; Achard, V.; Boucher, Y. COMANCHE and COCHISE: Two reciprocal atmospheric codes for hyperspectral remote sensing. In 2002 AVIRIS Earth Science and Applications Workshop Proceedings; Jet Propulsion Laboratory: Pasadena, CA, USA, 2002; pp. 1059–1068. [Google Scholar]
- Duflot, R.; Vialatte, A.; Sheeren, D.; Fauvel, M. Predicting ecosystem services in agricultural woodlands from airborne hyperspectral images. In Proceedings of the IUFRO 8.01. 02 Landscape Ecology Conference, Halle, Germany, 24–29 September 2017; p. 140. [Google Scholar]
- Scipy Python Package Documentation. Available online: https://docs.scipy.org/doc/ (accessed on 27 October 2021).
- Scikit-Learn Python Package Documentation. Available online: https://scikit-learn.org/stable/index.html (accessed on 27 October 2021).
- Scikit-Image Python Package Documentation. Available online: https://scikit-image.org/ (accessed on 27 October 2021).
- Nagao, M.; Matsuyama, T.; Ikeda, Y. Region extraction and shape analysis in aerial photographs. Comput. Graph. Image Process. 1979, 10, 195–223. [Google Scholar] [CrossRef]
- Hidalgo, D.R.; Cortés, B.B.; Bravo, E.C. Dimensionality reduction of hyperspectral images of vegetation and crops based on self-organized maps. Inf. Process. Agric. 2021, 8, 310–327. [Google Scholar] [CrossRef]
- Jolliffe, I. Principal component analysis. In Encyclopedia of Statistics in Behavioral Science; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Yi, F.; Moon, I. Image segmentation: A survey of graph-cut methods. In Proceedings of the 2012 international conference on systems and informatics (ICSAI2012), Yantai, China, 19–20 May 2012; pp. 1936–1941. [Google Scholar]
- Biau, G.; Scornet, E. A random forest guided tour. Test 2016, 25, 197–227. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Haralick, R.M. Recursive erosion, dilation, opening, and closing transforms. IEEE Trans. Image Process. 1995, 4, 335–345. [Google Scholar] [CrossRef]
- Adeline, K.R.; Chen, M.; Briottet, X.; Pang, S.K.; Paparoditis, N. Shadow detection in very high spatial resolution aerial images: A comparative study. ISPRS J. Photogramm. Remote Sens. 2013, 80, 21–38. [Google Scholar] [CrossRef]
- Ferri, F.J.; Pudil, P.; Hatef, M.; Kittler, J. Comparative study of techniques for large-scale feature selection. Mach. Intell. Pattern Recognit. 1994, 16, 403–413. [Google Scholar]
- Strîmbu, V.F.; Strîmbu, B.M. A graph-based segmentation algorithm for tree crown extraction using airborne LiDAR data. ISPRS J. Photogramm. Remote Sens. 2015, 104, 30–43. [Google Scholar] [CrossRef] [Green Version]
- Williams, J.; Schönlieb, C.B.; Swinfield, T.; Lee, J.; Cai, X.; Qie, L.; Coomes, D.A. 3D segmentation of trees through a flexible multiclass graph cut algorithm. IEEE Trans. Geosci. Remote Sens. 2019, 58, 754–776. [Google Scholar] [CrossRef]
- Latella, M.; Sola, F.; Camporeale, C. A Density-Based Algorithm for the Detection of Individual Trees from LiDAR Data. Remote Sens. 2021, 13, 322. [Google Scholar] [CrossRef]
- Kuželka, K.; Slavík, M.; Surový, P. Very high density point clouds from UAV laser scanning for automatic tree stem detection and direct diameter measurement. Remote Sens. 2020, 12, 1236. [Google Scholar] [CrossRef] [Green Version]
- Yao, W.; Krzystek, P.; Heurich, M. Identifying standing dead trees in forest areas based on 3D single tree detection from full waveform lidar data. ISPRS Ann. Protogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 359–364. [Google Scholar] [CrossRef]
- Pouliot, D.A.; King, D.J.; Bell, F.W.; Pitt, D.G. Automated tree crown detection and delineation in high-resolution digital camera imagery of coniferous forest regeneration. Remote Sens. Environ. 2002, 82, 322–334. [Google Scholar] [CrossRef]
- Miraki, M.; Sohrabi, H.; Fatehi, P.; Kneubuehler, M. Individual tree crown delineation from high-resolution UAV images in broadleaf forest. Ecol. Inform. 2021, 61, 101207. [Google Scholar] [CrossRef]
- Véga, C.; Hamrouni, A.; El Mokhtari, S.; Morel, J.; Bock, J.; Renaud, J.P.; Durrieu, S. PTrees: A point-based approach to forest tree extraction from lidar data. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 98–108. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Spectral Image 1 | CHM 2 | Forest Type 3 |
|---|---|---|---|
| Bernadouze | HS 4-VNIR-1 m | 1 m | Mono-species (beech) |
| Fabas | HS 4-VNIR-1 m | 1 m | Mixed-species (five major species, two types: deciduous and coniferous) |
| La Massane | RGB-Visible-0.1 m | 0.5 m | Mixed-species (23 species, but the majority beech, one type: deciduous) |
| Study Area | Tree Crown Number | Mean Crown Area (m2) | Description | Data Used for Photo-Interpretation |
|---|---|---|---|---|
| Bernadouze | 96 | 73 | Different locations in the forest and different crown sizes | CHM (1 m) BD ORTHO® (0.5 m) |
| Fabas (entire site) | 449 | 75 | Tree types (coniferous/broadleaf) and species spatial distribution (mixed/monospecific) | CHM (1 m) BD ORTHO® (0.5 m) |
| Fabas (test area) | 200 | 58 | Tree types (coniferous/broadleaf) and species spatial distribution (mixed/monospecific) | CHM (1 m) BD ORTHO® (0.5 m) |
| La Massane | 200 | 60 | Tree species, different locations and crown sizes | CHM (0.5 m) BD ORTHO® (0.1 m) |
| Coniferous (Mono-Type Area) | Coniferous (Mixed Area) | Broadleaf (Mono-Type Area) | Broadleaf (Mixed Area) | |
|---|---|---|---|---|
| Bernadouze (23 ha) | N/A | N/A | 98 | N/A |
| La Massane (52 ha) | N/A | N/A | 200 | N/A |
| Fabas | ||||
| Area 1 (155 ha) | 32 | 34 | 31 | 35 |
| Area 2 (160 ha) | N/A | 41 | 32 | 44 |
| Area 3 (235 ha) | N/A | 109 | N/A | 91 |
| Total | 32 | 184 | 63 | 170 |
| Test area (11.6 ha) | 65 | 80 | 30 | 25 |
| Method Steps | Parameters |
|---|---|
| Preprocessing | Shadow mask threshold |
| Median filter size | |
| Graph generation/Segment clustering | Difference in height between the maximum heights ∆hmax |
| Planar Euclidian distance between the maximum heights dhmax | |
| Local height variation between the maximum heights ∆hloc | |
| ∆spec (on RGB image or three first components of ACP) |
| Median Filter Size | dhmax | ∆hloc | P 1 | Matched | Missed | O-S 2 | U-S 3 | |
|---|---|---|---|---|---|---|---|---|
| Coniferous | 2 × 2 | [0.5–2] | [0.1–0.9] | 0.80 | 116 | 0 | 0 | 29 |
| Broadleaf | 3 × 3 | [3,4,5] | [0.5–1.1] | 0.93 | 51 | 0 | 2 | 2 |
| Median Filter Size | dhmax | ∆hloc | P Reference | P MCG-Tree | |
|---|---|---|---|---|---|
| Fabas | |||||
| Area 1 | 3 × 3 | [0.5–2.5] | 1 | 0.76 | 0.82 |
| Area 2 | 3 × 3 | [0.5–3.5] | [1.5–1.6] | 0.61 | 0.75 |
| Area 3 | 3 × 3 | [0.5–2.5] | 1.6 | 0.59 | 0.73 |
| All | 3 × 3 | [0.5–2.5] | [1.5–1.6] | 0.65 | 0.76 |
| Bernadouze | |||||
| 3 × 3 | 4.5 | [0.7–1.3] | 0.45 | 0.70 | |
| La Massane | |||||
| 3 × 3 | 3 | 1 | 0.61 | 0.72 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deluzet, M.; Erudel, T.; Briottet, X.; Sheeren, D.; Fabre, S. Individual Tree Crown Delineation Method Based on Multi-Criteria Graph Using Geometric and Spectral Information: Application to Several Temperate Forest Sites. Remote Sens. 2022, 14, 1083. https://doi.org/10.3390/rs14051083
Deluzet M, Erudel T, Briottet X, Sheeren D, Fabre S. Individual Tree Crown Delineation Method Based on Multi-Criteria Graph Using Geometric and Spectral Information: Application to Several Temperate Forest Sites. Remote Sensing. 2022; 14(5):1083. https://doi.org/10.3390/rs14051083
Chicago/Turabian StyleDeluzet, Matthieu, Thierry Erudel, Xavier Briottet, David Sheeren, and Sophie Fabre. 2022. "Individual Tree Crown Delineation Method Based on Multi-Criteria Graph Using Geometric and Spectral Information: Application to Several Temperate Forest Sites" Remote Sensing 14, no. 5: 1083. https://doi.org/10.3390/rs14051083
APA StyleDeluzet, M., Erudel, T., Briottet, X., Sheeren, D., & Fabre, S. (2022). Individual Tree Crown Delineation Method Based on Multi-Criteria Graph Using Geometric and Spectral Information: Application to Several Temperate Forest Sites. Remote Sensing, 14(5), 1083. https://doi.org/10.3390/rs14051083