1. Introduction
Synthetic-aperture radar (SAR) is an active microwave sensor that produces all-weather earth observations without being restricted by light and weather conditions. Compared with optical remote sensing images, SAR has significant application value. In recent years, SAR target detection and recognition have been widely used in military and civilian fields, such as military reconnaissance, situational awareness, agriculture, forestry management and urban planning. In particular, future war zones will extend from the traditional areas of land, sea and air to space. As a reconnaissance method with unique advantages, synthetic-aperture radar satellites may be used to seize the right to control information on future war zones and even play a decisive role in the outcome of these wars. SAR image target detection and recognition is the key technology with which to realize these military and civilian applications. Its core idea is to efficiently filter out regions and targets of interest through detection algorithms, and accurately identify their category attributes.
By contrast, from optical images, the imaging mechanism of SAR images is very different. SAR targets have characteristics such as strong scattering, unclear edge contour information, multiscale, strong sparseness, weak, small, sidelobe interference, and complex background. The SAR target detection and recognition tasks present huge challenges. In recent years, many research teams have also conducted extensive research on the above-mentioned difficulties. For SAR target imaging problems, phase modulation from a moving target’s higher-order movements severely degrades the focusing quality of SAR images, because the conventional SAR ground moving target imaging (GMTIm) algorithm assumes a constant target velocity in high-resolution GMTIm with single-channel SAR. To solve this problem, a novel SAR-GMTIm algorithm [
1] in the compressive sensing (CS) framework is proposed to obtain high-resolution SAR images with highly focused responses and accurate relocation. To improve moving target detectors, one study proposed a new moving target indicator (MTI) scheme [
2] by combining displaced-phase-center antenna (DPCA) and along-track interferometry (ATI) sequentially to reduce false alarms compared to MTI via either DPCA or ATI. As shown by the simulation results, the proposed method can not only reduce the false alarm rate significantly, but can also maintain a high detection rate. Another study proposed a synthetic-aperture radar (SAR) change-detection approach [
3] based on a structural similarity index measure (SSIM) and multiple-window processing (MWP) The work proposed by focusing on SAR imaging [
2] can be found in [
1]. The main focus of these studies is on the detection of moving SAR targets [
3] and changes in SAR images, while that of our study is SAR target detection.
The use of a detector with constant false-alarm rate (CFAR) [
4] is common in radar target detection. Constant false-alarm rate detection is an important part of automatic radar target detection. It can be used as the first step in extracting targets from SAR images and it is the basis for further target identification. However, traditional methods rely too much on expert experience to design manual features, which have great feature limitations. The traditional methods are also difficult to adapt to SAR target detection in complex scenes and cannot be used for large-scale practical applications. Based on traditional feature-extraction target-detection methods, the histogram-of-oriented-gradient (HOG) feature is a feature descriptor used for object detection in computer vision and image processing. HOG calculates histograms based not on color values but on gradients. It constructs features by calculating and counting the histograms of gradient directions in local areas of the image. HOG features combined with support-vector-machine (SVM) classifiers have been widely used in SAR image recognition. In recent years, with the development of computer vision, convolutional neural networks have been applied to SAR image detection, and a large number of deep neural networks have been developed, including AlexNet [
5], VGGNet [
6], ResNet [
7], and GoogLeNet [
8]. Additionally, methods such as Faster R-CNN [
9], SSD [
10], and YOLO V3 [
11] are also widely used in SAR image recognition. Moreover, we mainly rely on the advantages of CNN because it is highly skilled in extracting local feature information from images with more refined local attention capabilities. However, because of the large downsampling coefficient used in CNN to extract features, the network misses small targets. In addition, a large number of studies has shown that the actual receptive field in CNN is much smaller than the theoretical receptive field, which is not conducive to making full use of context information. CNN’s feature capturability is unable to extract global representations. Although we can enhance CNN’s global capturability by continuously stacking deeper convolutional layers, this results in a number of layers that are too deep, too many parameters for the model to learn, difficulty in effectively converging, and the possibility that the accuracy may not be greatly improved. Additionally, the model is too large, the amount of calculation increases sharply, and it becomes difficult to guarantee timeliness.
In recent years, the use of a classification and detection framework with a transformer [
12] as the main body has received widespread attention. Since Google proposed bidirectional encoder representation from transformers (BERT) [
13], the BERT model has also been developed, and the structure that plays an important role in BERT includes a transformer. Generalized autoregressive pretraining for language understanding (XLNET) [
14] and other models have since emerged. BERT’s core has not changed and still includes a transformer. The first vision transformer (ViT) for image classification was proposed in [
15] and obtained the best results in optical natural scene recognition. Network models, such as detection transformer (DETR) [
16] and Swin Transformer [
17], with a transformer utilized for the main body, have appeared in succession.
Swin Transformer is currently mainly used in image classification, optical object detection, and the instance segmentation of natural scenes in the field of computer vision. In the field of remote sensing, the Swin Transformer is mainly used in image segmentation [
18] and semantic segmentation [
19]. We investigated the papers in this area in detail, and did not find any research work in the field of SAR target detection. We can transfer the entire framework to target segmentation and transfer work, which is also a focus of our future work, at a later date.
The successful application of a transformer in the field of image recognition is mainly due to three advantages. The first advantage includes the ability to break through the RNN model’s limitation, enabling it to be calculated in parallel. The second advantage is that compared with CNN, the number of operations required to calculate the association between two positions does not increase with distance. The third advantage is that self-attention enables it to produce more interpretable models. We can check the attention distribution from the model. Each attention head can learn to perform different tasks. Compared with the CNN architecture, the transformer has better global feature capturabilities. Therefore, due to the key technical difficulties in the above-mentioned SAR target detection task, this paper combines the global context information perception of a transformer and the local information feature extractability of CNN that is oriented to the SAR target detection task, and innovatively proposes a context-based joint visual transformer framework for representation learning, referred to as CRTransSar. This is the first framework attempt in the field of SAR target detection. The experimental results from the SSDD and self-built SAR target dataset show that our method achieves higher precision. This paper focuses on the optimization design of the backbone and neck parts of the target detection framework. Therefore, we take the cascaded mask r-cnn framework as the basic framework of our method, and our method can be used as a functional module that is flexibly embedded in any other target detection frame. The main contributions of this paper include the following:
First, to address the lack of global long-range modeling and perception capabilities of existing CNN-based SAR target detection methods, we designed an end-to-end SAR target detector with a visual Transformer as the backbone.
Secondly, we incorporated strategies such as multi-dimensional hybrid convolution and self-attention, and constructed a new visual transformer backbone based on contextual joint representation learning, called CRbackbone, to improve the contextual salient feature description of multi-scale SAR targets.
In addition, to better adapt to multi-scale changes and complex background disturbances, we constructed a new cross-resolution attention enhancement neck, called CAENeck, which can guide the multi-resolution learning of dynamic attention modules with little increase in computational complexity.
Furthermore, we constructed a large-scale multi-class SAR target detection benchmark dataset. The source data were mainly from HISEA-1, China’s first commercial remote sensing SAR satellite, developed by our research group.
3. The Proposed Method
This paper combines the respective advantages of the transformer [
12] and CNN architectures, and is oriented to the SAR target detection task. Thus, we innovatively propose a visual transformer SAR target detection framework based on contextual joint-representation learning, called CRTransSar. The overall framework is shown in
Figure 1. This is the first framework attempt in the field of SAR target detection.
3.1. The Overall Framework of Our CRTransSar
First, based on the cascade mask r-cnn two-stage model as the basic architecture, this paper innovatively introduces the latest Swin Transformer architecture as the backbone, introduces the local feature extraction module of CNN, and redesigns a target detection framework. The design of the framework can fully extract and integrate the global and local joint representations.
Furthermore, this paper combines the respective advantages of a Swin Transformer and CNN to design a brand-new backbone, referred to as CRbackbone. Thus, the model can make full use of contextual information, perform joint-representation learning, extract richer contextual feature information, and improve the multi-characterization and description of multiscale SAR targets.
Finally, we designed a new cross-resolution attention enhancement Neck, CAENeck. A feature pyramid network [
34] is used to convey strong semantic features from top to bottom, enhancing the two-way multiscale connection operation through top-down and bottom-up attention, while also aggregating the parameters from different backbone layers to different detection layers, which can guide the multi-resolution learning of dynamic attention modules with little increase in computational complexity.
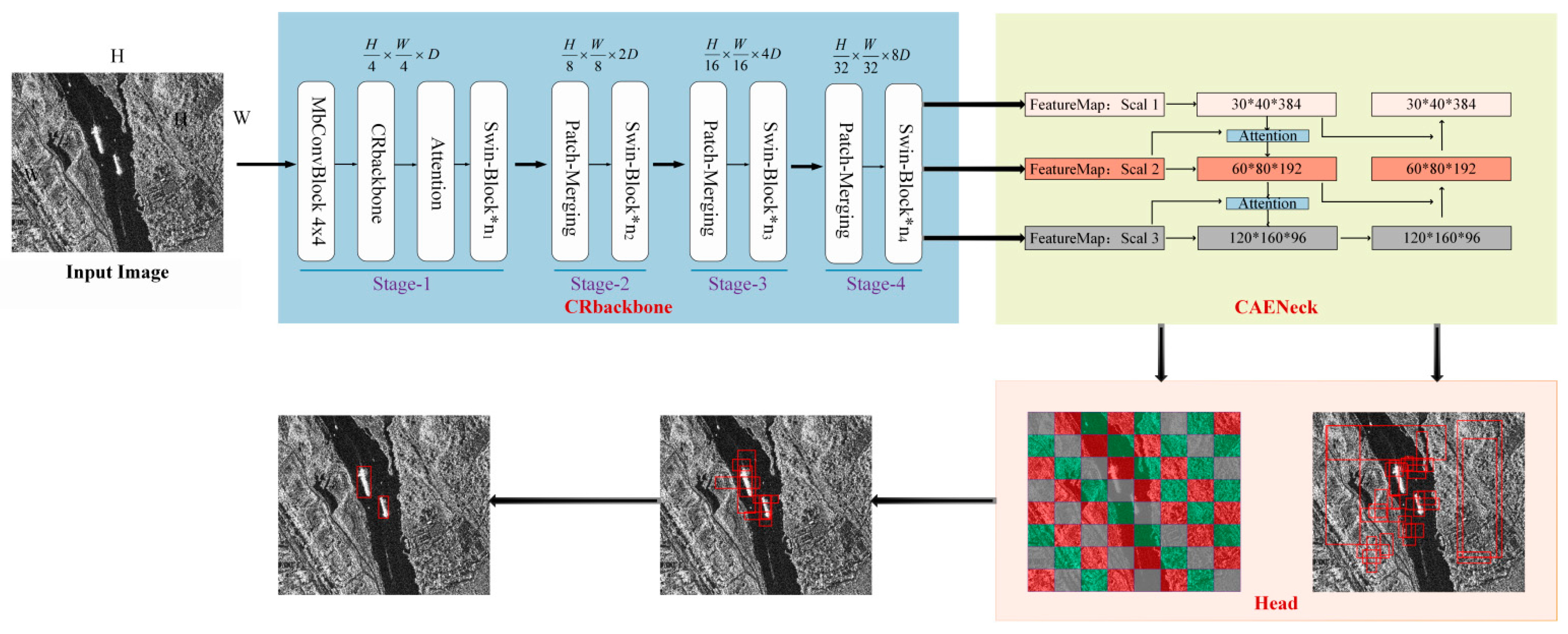
As shown in
Figure 1, CRTransSar is mainly composed of four parts: CRbackbone, CAENeck, RPN-Head, and Roi-Head. First, we used our designed CRbackbone to extract features from the input image and performed a multiscale fusion of the obtained feature maps. The bottom feature map is responsible for predicting small targets and the high-level feature map is responsible for predicting large targets. The RPN module receives the multiscale feature map and starts to generate anchor boxes, generating nine anchors corresponding to each point on the feature map, which can cover all possible objects on the original image. Using a 1 × 1 convolution to make prediction scores and prediction offsets for each anchor frame, all the anchor frames and labels were matched. Next, we calculated the value of IOU to determine whether the anchor frame belonged to the background or the foreground. Here, we establish a standard to distinguish the samples. The positive sample and the negative sample, after the above steps, obtain a set of suitable proposals. The received feature map and the above proposal are passed into ROI pooling for unified processing, and then finally passed to the fully connected RCNN network for classification and regression.
3.2. Backbone Based on Contextual Joint Representation Learning: CRbackbone
Aiming at the strong scattering, sparseness, multiscale, and other characteristics of SAR targets, this paper combines the respective advantages of transformer and CNN architectures to design a target detection backbone based on contextual joint representation learning, called CRbackbone. It performs joint representation learning, extracts richer contextual feature salient information, and improves the feature description of multiscale SAR targets.
First, we used the Swin Transformer, which currently performs best in NLP and optical classification tasks, as the basic backbone. Next, we incorporated CNN’s multiscale local information acquisition and redesigned the architecture of a Swin Transformer. Influenced by the latest EfficientNet [
35] and inspired by the architecture of CoTNet [
36], we introduced multidimensional hybrid convolution in the patchembed part to expand the receptive field, depth, and resolution, which enhanced the feature perception domain. Furthermore, the self-attention module was introduced to strengthen the comparison between different windows on the feature map, and for contextual information exchange.
3.2.1. Swin Transformer Module
For SAR images, small target ships in large scenes easily lose information in the process of downsampling. Therefore, we use a Swin Transformer [
17]. The framework is shown in
Figure 2. The transformer has general modeling capabilities and it is complementary to convolution. It also has powerful modeling capabilities, better connections between vision and language, a large throughput, and large-scale parallel processing capabilities. When a picture is input into our network, first the transformer [
11] is used to process the image because we need to use all of the means that can be processed to divide the picture into tokens similar to NLP with the high-resolution characteristics of the image. The language difference leads to a layered transformer whose representation is calculated by moving the window. By limiting self-attention calculations to non-overlapping partial windows while allowing cross-window connections, the shifted window scheme leads to higher efficiency. This layered architecture has the flexibility of modeling at various scales and has linear computational complexity relative to the image size. This is an improvement to the vision transformer.
The vision transformer always focuses on the patch that is segmented at the beginning and does not perform any operations on the patch in the subsequent process. Thus, it does not affect the receptive field. A Swin Transformer is processed when a window is enlarged; subsequently, the calculation of self-attention is calculated in units of windows. This is equivalent to introducing locally aggregated information, which is very similar to the convolution process of CNN. The step size is the same as the size of the convolution kernel; thus, the windows do not overlap. The difference is that CNN performs the calculation of convolution in each window, and each window finally obtains a value, which represents the characteristics of this window. The Swin Transformer performs the self-attention calculation in each window and obtains an updated window. Next, through the patch merging operation, the window is merged, and the merged window continues to perform self-calculation. The Swin Transformer places the patches of the surrounding four windows together in the process of continuous downsampling, and the number of patches decreases. In the end, the entire image has only one window and seven patches. Therefore, we believe that downsampling means reducing the number of patches, but the size of the patches increases, which increases the receptive field.
As illustrated in
Figure 3, the first module uses a regular window partitioning strategy, which starts from the top-left pixel, and the 8 × 8 feature map is evenly partitioned into 2 × 2 windows o 4 × 4 (M = 4) in size. Next, the next module adopts a windowing configuration that is shifted from that of the preceding layer by displacing the windows by (M/2, M/2) pixels from the regularly partitioned windows. With the shifted window-partitioning approach, consecutive Swin Transformer blocks are computed as:
where
and
denote the output features of the SW-MSA module and the MLP module for block, respectively; W-MSA and SW-MSA denote window-based multi-head self-attention using regular and shifted window partitioning configurations, respectively.
A Swin Transformer performs self-attention in each window. Compared with the global attention calculation performed by a transformer, we assume that the complexity of a known MSA is the square of the image size. According to the complexity of an MSA, we can conclude that the complexity is (3 × 3)
2 = 81. The Swin Transformer calculates self-attention in each local window (the red part). According to the complexity of MSA, we can see that the complexity of each red window is 1 × 1 squared, which is 1 to the fourth power. When there are nine windows, the complexity of these windows is summed, and the final complexity is nine, which is a greatly reduced figure. The calculation formulas for the complexity of an MSA and W-MSA are expressed by Formulas (2) and (3).
Although computing self-attention inside the window may greatly reduce the complexity of the model, different windows cannot interact with each other, resulting in a lack of expressiveness. To better enhance the performance of the model, shifted-windows attention is introduced. Shifted windows alternately move between successive Swin Transformer blocks.
3.2.2. Self-Attention Module
Due to its spatial locality and other characteristics in computer vision tasks, CNN can only model local information and lacks the ability to model and perceive long distances. The use of a Swin Transformer introduces a shifted-window partition to improve this defect. The problem of information exchange between different windows is not limited to the exchange of local information. Furthermore, based on multihead attention, this paper takes into account the CotNet [
36] contextual attention mechanism and proposes to integrate the attention module block into the Swin Transformer. The independent Q and K matrices are connected to each other. After the feature extraction network moves to patchembed, the feature map of the input network is 640*640*3. However, the length and width of the input data are not all 640*640. Next, we determine whether it is an integer multiple of 4 according to the length and width of the feature map to determine whether to pad the length and width of the feature map, followed by two convolutional layers. The feature channel changes from the previous 3 channels to 96 channels, and the feature dimension also changes to 1/4 of the previous dimension. Finally, the size of the attention module is 160*160*96, and the size of the convolution kernel is 3 × 3, as shown in
Figure 4. The feature dimension and feature channel of the module remain unchanged, which strengthens the information exchange between the different windows on the feature map.
The first step is to define three variables: Q = X, K = X, and V = XWv. V is subjected to 1 × 1 convolution processing, then K is the grouped convolution operation of K × K and is recorded as the Q matrix and concat operation. The result after the concat performs two 1 × 1 convolutions and the calculation are shown in formula 4.
The self-attention module first encodes the contextual information of the input keys through 3 × 3 convolution to obtain a static contextual expression K
1 about the input; the encoded keys are further concatenated with the input query and the dynamic multi-head attention matrix is learned through two consecutive 1 × 1 convolutions. The resulting attention matrix is multiplied by the input values to obtain a dynamic contextual representation K
2 about the input. The fusion result of static context and dynamic context expression is used as output O. The architecture of the self-attention module is shown in
Figure 5.
Here,
A does not just model the relationship between
Q and
K. Thus, through the guidance of context modeling, the communication between each part is strengthened, and the self-attention mechanism is enhanced.
Unlike the traditional self-attention mechanism, the self-attention module block structure of this paper combines contextual information and self-attention. Unlike the latest global self-attention mechanism, HOG-ShipCLSNet [
37] and PFGFE-Net [
38] are distinguish the characteristics of different scales and different polarization modes, so as to ensure sufficient global responses to comprehensively describe SAR ships. The specific process is to first calculate Φ and θ through two 1 × 1 convolutional layers, and it is used to characterize feature A through a 1 × 1 convolutional layer. The 1 × 1 convolutional layer is used to characterize feature g(·). We then obtain the similarity f by matrix multiplication θ
TΦ, and, finally, f through a softmax function/layer with a sigmoid activation is multiplied by g to obtain the self-attention output. Furthermore, to make the output y
i match the dimension of the input x to facilitate the follow-up element-wise adding operation, we add an extra 1 × 1 convolutional layer to achieve the dimension shaping. This is because in the embedded space, the number of convolution channels is c/2, which is not equal to the number of input channels c. This process is similar to the function of the residual or skip connections in ResNet, which can be described by 1 × 1. The weight matrix of the convolution layer is multiplied by y
i and then added to the input.
3.2.3. Multidimensional Hybrid Convolution Module
To increase the receptive field according to the characteristics of the SAR target, this section describes the proposed method in detail. The feature extraction network proposed in this paper is based on a Swin Transformer in order to improve the backbone. The CNN convolution is integrated into the patchembed module with the attention mechanism, and it is reconstructed. The entire feature extraction network structure diagram is shown in
Figure 6. Affected by the efficient network [
35], a multidimensional hybrid convolution module is introduced in the patchembed module. The reason why we introduced this network is that according to the mechanism characteristics of CNN, the more convolutional layers are stacked, the larger the receptive field of the feature maps. We used this approach to expand the receptive field and the depth of the network, and to increase the resolution to improve the performance of the network.
When computing resources increase, if we thoroughly search for various combinations of the three variables of width, depth, and image resolution, the search space is infinite and the search efficiency is very low. The key to obtaining higher accuracy and efficiency is to balance the scaling ratios (
d,
r,
w) of the three dimensions of network width, network depth, and image resolution using the combined zoom method:
, , are constants (not infinite because the three correspond to the amount of computation), which can be obtained by grid search. The mixing coefficient ϕ can be adjusted manually. If the network depth is doubled, the corresponding calculation amount will double, and the network width or image resolution will double the corresponding calculation amount, that is, the calculation amount of the convolution operation (FLOPS) is proportional to d, ω . There are two square terms in the condition. Under this constraint, after specifying the mixing coefficient ϕ, the network calculation amount is about 2Φ times what it was before.
Now, we can integrate the above three methods and integrate the hybrid parameter expansion method. Although there is no lack of research in this direction about models, such as MobileNet [
39], ShuffleNet [
40], M-NasNet [
41], etc., the model is compressed by reducing the amount of parameters and calculations. The model is also applied to mobile devices and edge devices, but the amount of parameters and calculations are considerably reduced at the same time. However, the accuracy of the model is greatly improved. The patchembed module mainly increases the channel dimensions of each patch, which are divided into non-overlapping patch sets by patch partitioning processing the input picture H × W × 3, which reduces the size of the feature map and sends it to the Swin Transformer block for processing. When each feature map is sent to patchembed’s dimension 2 × 3 × H × W and then finally sent to the next module, the dimension is 2 × 3 × 96. When four downsamplings are achieved through the convolutional layer and the number of channels becomes 96, a layer of a multidimensional hybrid convolution module is stacked before the 3 × 3 convolution. The size of the convolution kernel is 4, keeping the number of channels fed into the convolution unchanged, which also increases the depth of the receptive field and the network. This improves the efficiency of the model.
3.3. Cross-Resolution Attention Enhancement Neck: CAENeck
This paper, inspired by the structure of SGE [
42] and PAN [
43], addresses the small targets in large scenes, including the strong scattering characteristics of SAR imaging and the characteristics of low discrimination between targets and backgrounds. This paper designs a new cross-resolution attention enhancement neck, called CAENeck.
The specific step is to divide the feature map into G groups according to the channel, and then to calculate the attention of each group. After global average pooling is performed on each group, g is obtained, and then g is a matrix multiplied with the original grouped feature map. Next, we proceed to the norm. Additionally, sigmoid was used to perform the operation, and the result obtained was the matrix multiplied by the original grouping feature map. The specific steps are shown in
Figure 7.
The attention mechanism is added to connect the context information, and attention is incorporated at the top-to-bottom connection. This is to better integrate the shallow and deep feature map information and to better extract the features of small targets, along with the goals of the target. The positioning is shown in
Figure 1. We upsample during the transfer process of the feature map from top to bottom. The size of the feature map increases. The deepest layer is strengthened by the attention module and concatenated with the feature map of the middle layer, which then passes through the attention module. A concat connection is formed with the most shallow feature map. The specific steps are as follows. The neck receives the feature maps of three scales; 30*40*384, 60*80*192, 120*160*96, and 30*40*384 are the deepest features, which are upsampled and pay attention to the force enhancement operation, before being connected with 60*80*192. Finally, upsampling and attention enhancement are carried out to connect with the shallowest feature map.
This series of operations is carried out from top to bottom. Next, bottom-up multiscale feature fusion is performed.
Figure 1 shows the neck part. The SAR target is a very small target in a large scene, especially the marine ship target of the SSDD dataset. At sea, the ship itself has very little pixel information, and it easily loses the information of small objects in the process of downsampling. Although the high-level feature map is rich in semantic information for prediction, it is not conducive to the positioning of the target. The low-level feature map has little semantic information but is beneficial to the location of the target. The FPN [
34] structure is a fusion of high-level and low-level from top to bottom. It is achieved through upsampling. The attention module is added during the upsampling process to integrate contextual information mining and self-attention mechanisms into a unified body. The ability to extract the information of the target location is enhanced. Furthermore, the bottom-up module has a pyramid structure from the bottom to the high level, which realizes the fusion of the bottom level and the high level after downsampling, while enhancing the extraction of semantic feature information. The small feature map is responsible for detecting large ships, and the large feature map is responsible for detecting small ships. Therefore, attention enhancement is very suitable for multiscale ship detection in SAR images.
3.4. Loss
The loss function is used to estimate the gap between the model output y and the true value y to guide the optimization of the model. This paper uses different loss functions in the head part. The specific formulas for the loss of the category in the RPN-head use cross-entropy loss, and the regression loss utilization function is as follows:
where
represents the filtered anchor’s classification loss, P
i is the true value of each anchor’s category, and
is the predicted category of each anchor. Representing the loss of the regression, the function formula used for the regression loss is as follows:
4. Experiments and Results
This section evaluates our proposed detection method through experimental results. First, we use the SSDD dataset and the SMCDD dataset as experimental data. The SMCDD dataset provides some of the parameter settings of the experiment. The next part describes the influence of the attention enhancement backbone, the reconstruction of the patchembed module, and the multiscale attention enhancement neck. Finally, we compare our method with other methods to verify the effectiveness of our method. Our hardware platform is a personal computer with an Intel i5 CPU based on the mmdet [
44] framework, an NVIDIA RTX2060 GPU, 8 GB of video memory, and an Ubuntu 18.04 operating system.
4.1. Dataset
4.1.1. SSDD Dataset
We used a remote sensing SAR image dataset. The SAR ship detection established in 2017 used a SSDD ship dataset, which sets the baseline of the SAR ship detection algorithm and is used by many other scholars. The SSDD dataset contains data in a variety of scenarios, including different polarization modes and scenarios. We used the same labeling method as the most popular PASCAL VOC dataset. A total of 1160 images and 2456 ships were included, with an average of 2.12 ships per image. Although the number of images was small, we used it as a benchmark for ship target detection performance. The ratio of the training image, verification image, and test image was 7:2:1. The SSDD dataset is shown in
Table 1.
4.1.2. SMCDD Dataset
Our research group will soon release the SAR dataset, which contains data from the satellite HISEA-1 called SMCDD, as shown in
Figure 8.
The HISEA-1 satellite is China’s first commercial SAR synthetic-aperture radar satellite, jointly developed by the 38th Research Institute of China Electronics Technology Group Corporation, China Changsha Tianyi Space Science and Technology Research Institute Co., Ltd. (Changsha, China), as well as other units. Since its entry into orbit, the HISEA-1 has performed more than 1880 imaging tasks, obtaining 2026 striped images, 757 spotlight images, and 284 scanned images. The HISEA-1 has the ability to provide stable data services. The slice data of the SMCDD dataset we constructed are all from the SAR large scene image captured by HISEA-1.
Our SMCDD dataset contains four types of data: ship data, airplane data, bridge data, and oil tank data, as shown in
Figure 9. The images we used were all large. There were four polarization modes, and, as a result, we cut them into 256, 512, 1024, and 2048 sizes. We used slices of 1024 and 2048 sizes and finally passed our screening and cleaning, leaving 1851 bridges, 39,858 ships, 12,319 oil tanks, and 6368 aircraft, as shown in the figure. Although the current version of the dataset is unbalanced, we will continue to expand the dataset in the future. We also verified the effectiveness of the method proposed in this paper through our dataset. The data information is shown in
Table 2.
In contrast to the existing open-source SAR target detection dataset, our SMCDD dataset has the following advantages:
- (1)
The existing SAR target detection dataset is only for ship detection, and our dataset categories are richer, covering aircraft, ships, bridges, and oil tanks.
- (2)
The existing SAR target detection data collection is small, which makes it difficult to support the effective training of large-scale models. Our data collection is larger, which can support the training and verification of large-scale models.
- (3)
Since our dataset covers different types of SAR target data, our dataset can be used as a verification library for research directions, such as multiclass detection and recognition, long-tailed distribution (class imbalance), small sample detection and recognition, etc. This will greatly promote the overall development of the SAR target detection field.
- (4)
We cut our large-scene images into various sizes, such as 2048*2048, 1024*1024, 512*512, and 256*256. We filtered and cleaned the data, leaving 1851 bridges, 39,858 ships, 12,319 oil tanks, and 6368 aircraft. Although the current version of the dataset is unbalanced, we will continue to expand the dataset in the future. For larger targets, such as bridges, we need to choose more large slice samples, generally 1024*1024 or 2048*2048, so that the network can better train the data.
- (5)
We have large-scene SAR images of HISEA-1, which can provide a large amount of training data to improve the SAR target detection performance of the network in large scenes.
4.2. Setup and Implementation Details
This study used Python 3.7.10, PyTorch 1.6.0, CUDA 10.1, CUDNN 7.6.3, and MMCV1.3.1, and the results of our network pretraining model were Swin-T on ImageNet. A total of 500 epochs was set up for training in the entire network. Due to the limitations of computer hardware and the size of the network itself, the batch size was set to 2. Each training sent two images to the network for processing, and the AdamW optimizer was selected as the model. The initial learning rate was set to 0.0001, the weight attenuation was 0.0001, and strategies such as LoadImageFromFile, LoadAnnotations, RandomFlip, and AutoAugment were used to optimize the training pipeline, as well as to enhance the online data, which enhanced the robustness of the algorithm. We adjusted the image size and finally selected the most suitable size for the network proposed in this paper to be 640*640.
4.3. Evaluation Metric
To quantitatively evaluate the performance of the proposed cascade mask rcnn with the improved Swin Transformer as the backbone and CAENeck as the neck detection algorithm, the accuracy, recall rate, average accuracy (mAP) and F-measure (F1) were used as evaluation indicators. Accuracy refers to the rate of correct detection of ships in all detection results, and recall refers to the rate of correct detection of ships in all ground facts. The definition of precision and recall is as follows:
In the formula,
TP,
FP, and
FN represent the positive samples predicted by the model as positive, the negative samples predicted by the model as positive, and the positive samples predicted by the model as negative, respectively. In addition, if the IoU between the predicted bounding box and the real bounding box is higher than the threshold of 0.5, the bounding box is recognized as a correctly detected ship. The precision recall (
PR) curve shows the precision recall rate under different confidence thresholds.
MAP is a comprehensive metric that calculates the average precision under the recall range [0, 1]. The definition of m
AP is as follows:
In the formula,
R is the recall value, which represents the precision corresponding to the recall.
F1 evaluates the comprehensive performance of the detection network proposed in this paper by considering the accuracy and recall rate.
F1 is defined as:
4.4. Analysis of Experimental Results
4.4.1. Ablation Experiments
A. The Influence of CRbackbone on the Experimental Evaluation Index
During the experiment, we first added the improved network backbone to the network, and the neck part was consistent with the baseline. We compared the benchmark Swin Transformer as the backbone, and PAN as the neck, and evaluated the test indicators. The comparison results are shown in
Table 3. We observed that adding the optimized backbone to the percentage of mAP (0.5) led to an improvement of 0.4%; the improvement of mAP (0.75) was 6.5%, and the recall rate was also improved, by 1.3%. Therefore, the improved backbone had a propelling effect on the optimization of the network.
B. The Influence of the CAENeck Module on the Experimental Evaluation Index
During the experiment, first added the improved network neck into the network, and the backbone part was consistent with the baseline. The lightweight attention-enhancement neck module was discarded to study its influence on the experiment, and an evaluation of the experimental indicators was carried out. The comparison results are shown in
Table 4. We observed a 0.1% improvement in the percentage of mAP (0.5), a 2.5% improvement in mAP (0.75), and a 0.2% improvement in the recall rate. In the neck part, the detection performance also improved.
4.4.2. Experimental Comparison with Current Methods
To compare traditional methods and advanced methods, we adopted the same parameter settings to test and verify them. We propose to use the improved Swin Transformer as the backbone’s cascade mask RCNN target detection network to verify and compare the SSDD dataset and the dataset to be released by our research group. The experimental results are shown in the following table.
The target detection model proposed in this paper achieved a substantial improvement over the SSDD dataset. The accuracy of mAP (0.5) reached 97.0%, the accuracy of mA (0.75) reached 76.2%, and the F1 was 95.3. It can be seen that through the improvement of the Swin Transformer, the integration of the CotNet attention mechanism, and the lightweight EfficientNet module in patchembed promoted the optimization of the backbone. The cross-resolution attention enhancement neck strengthened the characteristics of the different scales. The fusion of the maps and these several methods are of great help for detecting ships. We compared the two-stage, single-stage, and anchor-free methods. The experiments showed that the detection accuracy of the method proposed in this paper is generally higher than that of the two-stage methods, such as Faster RCNN (88.5%) and Cascade R-CNN [
45] (89.3%). We also compared our results with those of single-stage yolov3 (95.1%), SSD (84.9%), and RetinaNet (90.5%) [
46]. The experimental results were also higher than those of the single-stage detection algorithm, which shows that the transformer uses the attention mechanism. Powerful functions, cascaded local information, and enhanced multiscale fusion is more conducive to the detection of inshore vessels without the perception of noise or the identification of ships of different sizes. We also compared the most advanced FCOS [
47] and CenterNet [
48] without anchor frame detection and Cascade R-CNN [
45] and Libra R-CNN [
49] with anchor frame detection, as shown in
Table 5 and
Table 6. This paper also draws the PR curve to compare the difference between the different networks, in
Figure 10.
The basic principle of CenterNet is that each target object is modeled as a center point to represent it. No candidate frame is required, nor is postprocessing, such as non-maximum suppression. CenterNet uses a fully convolutional network to generate a high-resolution feature map, classifies and judges each pixel of the feature map, and determines whether it is the center point of the target category or the background. This feature map gives each target the position of the center point of the object, the processing confidence in the center point of the target is 1, and the confidence of the background point is 0. Now, since there is no anchor box, there is no need to calculate the IoU between the anchor box and the bounding box to obtain positive samples to directly train the regressor. Instead, each point (located within the bounding box and having the correct class label) that is determined to be a positive sample is part of the regression of the bounding box size parameter.
This paper quotes the latest SAR target detection methods, FBR-Net [
50], CenterNet++ [
51], NNAM [
52], DCMSNM [
53], and DAPN [
54]. Since the relevant papers do not have specific data divisions, this paper has no way to fully reproduce the results from other relevant papers. Therefore, this paper can only quote them. The results are compared horizontally, as shown in
Table 7.
To demonstrate the robustness of our proposed algorithm, we conducted comparative experiments with low SNR on salt and pepper noise, random noise, and Gaussian noise. In the salt and pepper noise experiments, our method led to mAP of 94.8. The map of our method was 5.5% higher than Yolo v3 and 9.7% higher than Faster R-CNN. In the random noise experiments, our method led to mAP of 96.7. The map of our method was 3% higher than Yolo v3 and 11.1% higher than Faster R-CNN. In the Gaussian noise experiments, our method led to mAP of 95.8. The map of our method was 1% higher than Yolo v3 and 10.7% higher than Faster R-CNN. The experimental results, presented in
Table 8, show that we produced a reliable performance for SAR target detection tasks in low SNR.
In order for our proposed method to effectively solve the SAR target detection task, we also made corresponding experimental comparisons for the computational cost of the Swin Transformer. The FPS and parameter statistics of several representative target detection algorithms are shown in
Table 9. Compared with the single-stage target detection algorithm, our parameter was 34M higher than YOLO V3, and the FPS was 28.5M lower, but the mAP was 1.9% higher than YOLO v3. Compared with two-stage target detection, the parameter amount was 52M higher than Faster R-CNN, and the FPS was 11.5M lower. Compared with Cascade R-CNN, the parameter amount was 8M higher and the FPS was 4.5M lower. Compared with Cascade Mask R-CNN, the number of parameters was 19M higher and the FPS was 7.5M lower. However, our mAP was 8.5% higher than that of Faster R-CNN, 7.7% higher than that of Cascade R-CNN, and 6.8% higher than that of Cascade Mask R-CNN. Because the overall architecture of the Swin Transformer is still relatively large, the large volume of Transformer is a general problem in this field, and we plan to make further improvements in model lightweighting and compression in the future.
4.4.3. Comparison between Experimental Results of the SMCDD Data Set
We used state-of-the-art object detection methods to evaluate our self-built SMCDD dataset. We chose CRTransSar, RetinaNet, and YOLOV3 as our benchmark algorithms, as shown in
Table 10. There was a large number of dense targets in the oil tanks and aircraft in the SMCDD data set, which posed great challenges to the detection. It can be seen from the data that CRTransSar’s mAP reached 16.3, which was better than RetinaNet and yolov3, and it was also higher than these two models in Recall.
4.5. Visualization Result Verification and Analysis
To verify the effectiveness of the method in this paper, we visualized the SSDD dataset and the dataset to be released by our own research group, and obtained satisfactory results. We randomly selected some near-shore and far-shore ships for inspection. It can be seen from the figure that the use of multiscale fusion feature maps can more effectively improve the results of SAR images in different scenes, meaning that the method proposed in this paper can extract features with rich semantic information, even from complex backgrounds near shore. This method can also eliminate the interference and accurately identify the place where the naked eye has difficulty distinguishing between the noise and the ship. It can also eliminate some marine object noise, such as ships in the distant sea, and can be accurately distinguished. We also accurately verified the ships photographed by HISEA-1.
(1) This section visually verifies the performance of the network from two datasets, which are divided into inshore and offshore sets.
Figure 11 shows the visual verification of SSDD inshore ships. When there is a relatively small amount of dense ships, the network’s detection performance is better, and it is not disturbed by shore noise.
Figure 12 is the dataset to be released by our research group, which contains inshore ships photographed by the HISEA-1 satellite and high-resolution satellites.
(2)
Figure 13 and
Figure 14 are the SSDD dataset of the far sea and the results of the identification of the offshore ships of the dataset to be released by our research group, respectively. Offshore, because the surrounding environment receives less noise interference, the recognition accuracy is higher than it is inshore. Therefore, almost all target ships can be accurately identified in the offshore scene.
(3) To demonstrate the object detection performance of our proposed method for large scenes, we selected our self-built SMCDD dataset as the inference dataset. Our original data were obtained from the 38th Research Institute of China Electronics Technology Group Corporation. Because the data belonged to a secret military institution, we signed a confidentiality agreement with them. The original image of the large scene was obtained by HISEA-1. However, to further demonstrate the effectiveness of our method, we used the sliced data of some large scenes with a size of 2048*2048. As shown in
Figure 15, from the visualization results, it can be seen that
Figure 15a,f are missing detections in three places;
Figure 15b,d feature one false detection.
6. Conclusions
SAR target detection has important application value in military and civilian fields. Aiming to overcome the difficulties of SAR targets, such as strong scattering, sparseness, multiscale, unclear contour information, and complex interference, we propose a visual transformer SAR target detection framework based on contextual joint representation learning, called CRTransSar. In this paper, CNN and the transformer are innovatively combined to improve the feature representation and the detectability of SAR targets in a balanced manner. This study was based on the use of a Swin Transformer and integrates CNN architecture ideas. We also redesigned a new backbone, named CRbackbone, which makes full use of contextual information, conducts joint-representation learning, and extracts richer context-feature salient information. Furthermore, we constructed a new cross-resolution attention enhancement neck, called CAENeck, which is used to enhance the ability to characterize SAR targets at different scales.
We conducted related experiments on the SSDD dataset and SMCDD dataset, as well as verification experiments on the SSDD dataset and the SMCDD dataset to be released by our research group. We performed visual verification of the classification of near-shore vessels and high-water vessels in the verification experiment. The high-quality results prove the robustness and practicability of our method. In the comparison experiment on the two-stage and no-anchor frames, higher precision was achieved. The method proposed in this paper achieves 97.0% mAP (0.5) and 76.2% mAP (0.75). In future work, we will first standardize the SMCDD dataset of our research group and release it for download and use. In addition, we will introduce segmentation to detect densely adjacent ships and explore more efficient distillation methods that do not require time-consuming training. Combined with pruning methods, model compression will be more diversified and easier to transplant, as will the lightweight development of the network.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}