
On the Potential for Remote Observations of Coastal Morphodynamics from Surf-Cameras


Abstract
:
1. Introduction
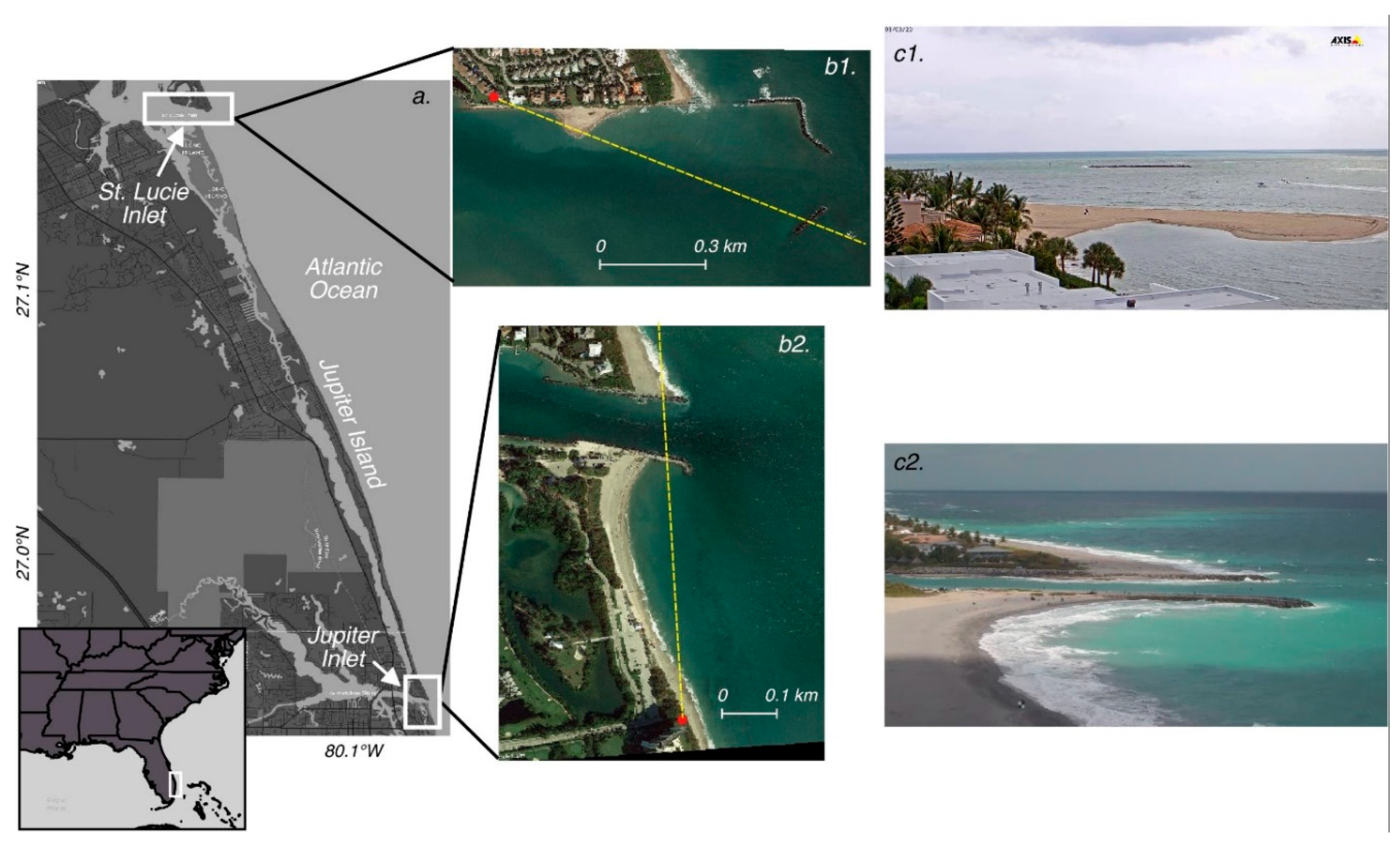
2. Study Sites and Surfcams
3. Materials and Methods
3.1. Video Acquisition
3.2. Photogrammetric Transformations
3.2.1. Modified Space Resection
3.2.2. Remote-GCP and Camera Parameter Extraction
3.3. Accuracy Assessment of Photogrammetric Transformations
4. Results
5. Discussion
5.1. Sources of Error
5.2. Shoreline Change Case Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Elgar, S.; Gallagher, E.L.; Guza, R.T. Nearshore sandbar migration. J. Geophys. Res. Ocean. 2001, 106, 11623–11627. [Google Scholar] [CrossRef]
- Hsu, T.J.; Elgar, S.; Guza, R.T. Wave-induced sediment transport and onshore sandbar migration. Coast. Eng. 2006, 53, 817–824. [Google Scholar] [CrossRef] [Green Version]
- Ruessink, B.G.; Pape, L.; Turner, I.L. Daily to interannual cross-shore sandbar migration: Observations from a multiple sandbar system. Cont. Shelf Res. 2009, 29, 1663–1677. [Google Scholar] [CrossRef]
- Limber, P.W.; Adams, P.N.; Murray, A.B. Modeling large-scale shoreline change caused by complex bathymetry in low-angle wave climates. Mar. Geol. 2017, 383, 55–64. [Google Scholar] [CrossRef] [Green Version]
- Conlin, M.P.; Adams, P.N.; Jaeger, J.M.; MacKenzie, R. Quantifying Seasonal-to-Interannual-Scale Storm Impacts on Morphology Along a Cuspate Coast with a Hybrid Empirical Orthogonal Function Approach. J. Geophys. Res. Earth Surf. 2020, 125, e2020JF005617. [Google Scholar] [CrossRef]
- Stockdon, H.F.; Sallenger, A.H.; List, J.H.; Holman, R.A. Estimation of Shoreline Position and Change Using Airborne Topographic Lidar Data. J. Coast. Res. 2002, 18, 502–513. [Google Scholar]
- Pianca, C.; Holman, R.; Siegle, E. Shoreline variability from days to decades: Results of long-term video imaging. J. Geophys. Res. Ocean. 2015, 120, 2159–2178. [Google Scholar] [CrossRef]
- Splinter, K.; Harley, M.; Turner, I. Remote Sensing Is Changing Our View of the Coast: Insights from 40 Years of Monitoring at Narrabeen-Collaroy, Australia. Remote Sens. 2018, 10, 1744. [Google Scholar] [CrossRef] [Green Version]
- O’Dea, A.; Brodie, K.L.; Hartzell, P. Continuous coastal monitoring with an automated terrestrial lidar scanner. J. Mar. Sci. Eng. 2019, 7, 37. [Google Scholar] [CrossRef] [Green Version]
- Ton, A.; Lee, M.; Vos, S.; Gawehn, M.; den Heijer, K.; Aarninkhof, S. Beach and nearshore monitoring techniques. In Sandy Beach Morphodynamics, 1st ed.; Jackson, D.W.T., Short, A.D., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 659–687. [Google Scholar] [CrossRef]
- Harley, M.D.; Turner, I.L.; Short, A.D.; Ranasinghe, R. Assessment and integration of conventional, RTK-GPS and image-derived beach survey methods for daily to decadal coastal monitoring. Coast. Eng. 2011, 58, 194–205. [Google Scholar] [CrossRef]
- Holland, K.T.; Holman, R.A.; Lippmann, T.C.; Stanley, J.; Plant, N. Practical use of video imagery in nearshore oceanographic field studies. IEEE J. Ocean. Eng. 1997, 22, 81–92. [Google Scholar] [CrossRef]
- Holman, R.A.; Stanley, J. The history and technical capabilities of Argus. Coast. Eng. 2007, 54, 477–491. [Google Scholar] [CrossRef]
- Plant, N.G.; Holman, R.A.; Freilich, M.H.; Birkemeier, W.A. A simple model for interannual sandbar behavior. J. Geophys. Res. Ocean. 1999, 104, 15755–15776. [Google Scholar] [CrossRef]
- Adams, P.N.; Ruggiero, P.; Schoch, G.C.; Gelfenbaum, G. Intertidal sand body migration along a megatidal coast, Kachemak Bay, Alaska. J. Geophys. Res. Earth Surf. 2007, 112, F02007. [Google Scholar] [CrossRef] [Green Version]
- Aarninkhof, S.G.; Ruessink, B.G. Video observations and model predictions of depth-induced wave dissipation. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2612–2622. [Google Scholar] [CrossRef]
- Plant, N.G.; Holland, K.T.; Haller, M.C. Ocean wavenumber estimation from wave-resolving time series imagery. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2644–2658. [Google Scholar] [CrossRef]
- Power, H.E.; Holman, R.A.; Baldock, T.E. Swash zone boundary conditions derived from optical remote sensing of swash zone flow patterns. J. Geophys. Res. Ocean. 2011, 116, C06007. [Google Scholar] [CrossRef] [Green Version]
- Andriolo, U.; Sánchez-García, E.; Taborda, R. Operational use of surfcam online streaming images for coastal morphodynamic studies. Remote Sens. 2019, 11, 78. [Google Scholar] [CrossRef] [Green Version]
- Conlin, M.P.; Scheinkman, A.U.S. Surf-Camera Database. Available online: http://doi.org/10.5281/zenodo.3946697 (accessed on 31 March 2022).
- Mole, M.A.; Mortlock, T.R.; Turner, I.L.; Goodwin, I.D.; Splinter, K.D.; Short, A.D. Capitalizing on the surfcam phenomenon: A pilot study in regional-scale shoreline and inshore wave monitoring utilizing existing camera infrastructure. J. Coast. Res. 2013, 65, 1433–1438. [Google Scholar] [CrossRef]
- Bracs, M.A.; Turner, I.L.; Splinter, K.D.; Short, A.D.; Lane, C.; Davidson, M.A.; Goodwin, I.D.; Pritchard, T.; Cameron, D. Evaluation of opportunistic shoreline monitoring capability utilizing existing “surfcam” infrastructure. J. Coast. Res. 2016, 32, 542–554. [Google Scholar] [CrossRef]
- Valentini, N.; Balouin, Y.; Bouvier, C. Exploiting the capabilities of surfcam for coastal morphodynamic analysis. J. Coast. Res. 2020, 95, 1333–1338. [Google Scholar] [CrossRef]
- Sánchez-García, E.; Balaguer-Beser, A.; Pardo-Pascual, J.E. C-Pro: A coastal projector monitoring system using terrestrial photogrammetry with a geometric horizon constraint. ISPRS J. Photogram. Remote Sens. 2017, 128, 255–273. [Google Scholar] [CrossRef] [Green Version]
- Conlin, M.P.; Adams, P.N.; Wilkinson, B.; Dusek, G.; Palmsten, M.L.; Brown, J.A. SurfRCaT: A tool for remote calibration of pre-existing coastal cameras to enable their use as quantitative coastal monitoring tools. SoftwareX 2020, 12, 100584. [Google Scholar] [CrossRef]
- National Data Buoy Center Station 41114—Fort Pierce, FL (134). Available online: https://www.ndbc.noaa.gov/station_page.php?station=41114 (accessed on 25 January 2022).
- Weggel, J.R. Weir Sand-Bypassing Systems; Special Report No. 8; Coastal Engineering Research Center: Fort Belvoir, VA, USA, 1981; Available online: https://ia800300.us.archive.org/7/items/weirsandbypassin00wegg/weirsandbypassin00wegg.pdf (accessed on 11 November 2021).
- Mehta, A.J.; Montague, C.L.; Thieke, R.J. Erosion, Navigation, and Sedimentation Imperatives at Jupiter Inlet, Florida: Recommendations for Coastal Engineering Management; University of Florida: Gainesville, FL, USA, 1992; Available online: http://aquaticcommons.org/494/1/UF00080457.pdf (accessed on 11 November 2021).
- American Shore and Beach Preservation Association; APTIM. U.S. Army Corps of Engineers Regional Sediment Management Program 2022. National Beach Nourishment Database; Web. Available online: https://gim2.aptim.com/ASBPANationwideRenourishment/ (accessed on 15 January 2022).
- St Lucie Inlet. Available online: http://www.stlucieinlet.com/ (accessed on 1 August 2021).
- Jupiter Inlet Webcam. Available online: http://www.evsjupiter.com/ (accessed on 15 March 2021).
- Wolf, P.R.; Dewitt, B.A.; Wilkinson, B.E. Elements of Photogrammetry: With Applications in GIS, 4th ed.; McGraw-Hill: New York, NY, USA, 2014; pp. 1–651. [Google Scholar]
- Richardson, A.D.; Jenkins, J.P.; Braswell, B.H.; Hollinger, D.Y.; Ollinger, S.V.; Smith, M.L. Use of digital webcam images to track spring green-up in a deciduous broadleaf forest. Oecologia 2007, 152, 323–334. [Google Scholar] [CrossRef] [PubMed]
- Sonnentag, O.; Hufkens, K.; Teshera-Sterne, C.; Young, A.M.; Friedl, M.; Braswell, B.D.; Richardson, A.D. Digital repeat photography for phenological research in forest ecosystems. Agric. For. Meteorol. 2012, 152, 159–177. [Google Scholar] [CrossRef]
- Harley, M.D.; Kinsela, M.A.; Sánchez-García, E.; Vos, K. Shoreline change mapping using crowd-sourced smartphone images. Coast. Eng. 2019, 150, 175–189. [Google Scholar] [CrossRef]
- NOAA Office for Coastal Management. Lidar Datasets at NOAA Digital Coast; FTP. 2022. Available online: ftp.coast.noaa.gov/pub/DigitalCoast/ (accessed on 7 July 2021).
- Vos, K.; Harley, M.D.; Splinter, K.D.; Simmons, J.A.; Turner, I.L. Sub-annual to multi-decadal shoreline variability from publicly available satellite imagery. Coast. Eng. 2019, 150, 160–174. [Google Scholar] [CrossRef]
- Heikkila, J.; Silvén, O. A four-step camera calibration procedure with implicit image correction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 18–20 June 1996; pp. 1106–1112. [Google Scholar]
- Prescott, B.; McLean, G.F. Line-based correction of radial lens distortion. Graph. Model. Image Process. 1997, 59, 39–47. [Google Scholar] [CrossRef]
- Rangel, J.M.G.; Gonçalves, G.R.; Pérez, J.A. The impact of number and spatial distribution of GCPs on the positional accuracy of geospatial products derived from low-cost UASs. Int. J. Remote Sens. 2018, 39, 7154–7171. [Google Scholar] [CrossRef]
- Laporte-Fauret, Q.; Marieu, V.; Castelle, B.; Michalet, R.; Bujan, S.; Rosebery, D. Low-Cost UAV for High-Resolution and Large-Scale Coastal Dune Change Monitoring Using Photogrammetry. J. Mar. Sci. Eng. 2019, 7, 63. [Google Scholar] [CrossRef] [Green Version]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the world from internet photo collections. Int. J. Comp. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Aziz, Y.I.; Karara, H.M. Direct Linear Transformation from Comparator Coordinates into Object Space Coordinates in Close-Range Photogrammetry. In Proceedings of the Symposium on Close-Range Photogrammetry, Urbana, IL, USA, 26–29 January 1971; pp. 1–18. [Google Scholar]
- Remondino, F.; Fraser, C. Digital camera calibration methods: Considerations and comparisons. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 266–272. [Google Scholar] [CrossRef]
- Plant, N.G.; Aarninkhof, S.G.J.; Turner, I.L.; Kingston, K.S. The Performance of Shoreline Detection Models Applied to Video Imagery. J. Coast. Res. 2007, 23, 658–670. [Google Scholar] [CrossRef]
- Seabergh, W.C.; Thomas, L.J. Weir Jetties at Coastal Inlets: Part 2, Case Studies. Report ERDC/CHL CHETN-IV-54. 2002. Available online: https://erdc-library.erdc.dren.mil/jspui/bitstream/11681/1962/1/CHETN-IV-54.pdf (accessed on 11 November 2021).
- Harley, M. mapShorelineCCD.m [Computer Software]. 2018. Available online: https://github.com/Coastal-Imaging-Research-Network/Shoreline-Mapping-Toolbox/blob/master/mapShorelineCCD.m (accessed on 12 January 2022).
- Vos, K.; Splinter, K.D.; Harley, M.D.; Simmons, J.A.; Turner, I.L. CoastSat: A Google Earth Engine-enabled Python toolkit to extract shorelines from publicly available satellite imagery. Environ. Model. Softw. 2019, 122, 104528. [Google Scholar] [CrossRef]
- Sallenger, A.H.; Stockdon, H.F.; Fauver, L.; Hansen, M.; Thompson, D.; Wright, C.W.; Lillycrop, J. Hurricanes 2004: An overview of their characteristics and coastal change. Estuaries Coasts 2006, 29, 880–888. [Google Scholar] [CrossRef]
- Archetti, R.; Romagnoli, C. Analysis of the effects of different storm events on shoreline dynamics of an artificially embayed beach. Earth Surf. Process. Landf. 2011, 36, 1449–1463. [Google Scholar] [CrossRef]
- Harley, M.D.; Turner, I.L.; Kinsela, M.A.; Middleton, J.H.; Mumford, P.J.; Splinter, K.D.; Phillips, M.S.; Simmons, J.A.; Hanslow, D.J.; Short, A.D. Extreme coastal erosion enhanced by anomalous extratropical storm wave direction. Sci. Rep. 2017, 7, 6033. [Google Scholar] [CrossRef] [Green Version]
- Mohanty, P.K.; Kar, P.K.; Behera, B. Impact of very severe cyclonic storm Phailin on shoreline change along South Odisha Coast. Nat. Hazards 2019, 102, 633–644. [Google Scholar] [CrossRef]
- Ruggiero, P.; Kaminsky, G.M.; Gelfenbaum, G.; Voigt, B. Seasonal to Interannual Morphodynamics along a High-Energy Dissipative Littoral Cell. J. Coast. Res. 2005, 21, 553–578. [Google Scholar] [CrossRef]
- Hansen, J.E.; Barnard, P.L. Sub-weekly to interannual variability of a high-energy shoreline. Coast. Eng. 2010, 57, 959–972. [Google Scholar] [CrossRef]
- Forbes, D.L.; Parkes, G.S.; Manson, G.K.; Ketch, L.A. Storms and shoreline retreat in the southern Gulf of St. Lawrence. Mar. Geol. 2004, 210, 169–204. [Google Scholar] [CrossRef]
- Del Río, L.; Gracia, F.J.; Benavente, J. Shoreline change patterns in sandy coasts. A case study in SW Spain. Geomorphology 2013, 196, 252–266. [Google Scholar] [CrossRef] [Green Version]
- Actueel Hoogtebestand Nederland. Available online: https://www.ahn.nl/ (accessed on 4 March 2022).
- Terrestrial Research Ecosystem Network Australia. TERNCatalog Lidar; THREDDS. 2022. Available online: https://dap.tern.org.au/thredds/catalog/landscapes/remote_sensing/airborne_validation/lidar/catalog.html (accessed on 12 March 2022).
- Jackson, N.L.; Nordstrom, K.F. Trends in research on beaches and dunes on sandy shores, 1969–2019. Geomorphology 2020, 366, 106737. [Google Scholar] [CrossRef]
- Total Water Level and Coastal Change Forecast Viewer. Available online: https://coastal.er.usgs.gov/hurricanes/research/twlviewer/ (accessed on 24 January 2022).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Jupiter | St. Lucie | ||
|---|---|---|---|---|
| init. approx. | adjusted val. | init. approx. | adjusted val. | |
| ω (°) | azimuth (°) | 79.64 | 350 | 97.83 | 133.80 | 297.55 | 110 | 270.20 | 298 |
| ϕ (°) | tilt (°) | 9.74 | 80 | 225.93 | 84.56 | 292.39 | 80 | 118.43 | 90 |
| κ (°) | swing (°) | 1.72 | 180 | 9.18 | 176.46 | 205.30 | 180 | 180.70 | 179 |
| (UTM m) | 592,268.60 | 592,268.53 | 583,381.79 | 583,380.90 |
| (UTM m) | 2,979,958.33 | 2,979,959.05 | 3,005,482.72 | 3,005,482.16 |
| (NAVD88 m) | 64.0 | 63.88 | 21.30 | 21.65 |
| (pix) | 1662.77 | 3270.42 | 1662.77 | 3180.94 |
| (pix) | 960.0 | −1914.91 | 960.0 | 1186.42 |
| (pix) | 540.0 | −44.63 | 540.0 | 454.36 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Conlin, M.P.; Adams, P.N.; Palmsten, M.L. On the Potential for Remote Observations of Coastal Morphodynamics from Surf-Cameras. Remote Sens. 2022, 14, 1706. https://doi.org/10.3390/rs14071706
Conlin MP, Adams PN, Palmsten ML. On the Potential for Remote Observations of Coastal Morphodynamics from Surf-Cameras. Remote Sensing. 2022; 14(7):1706. https://doi.org/10.3390/rs14071706
Chicago/Turabian StyleConlin, Matthew P., Peter N. Adams, and Margaret L. Palmsten. 2022. "On the Potential for Remote Observations of Coastal Morphodynamics from Surf-Cameras" Remote Sensing 14, no. 7: 1706. https://doi.org/10.3390/rs14071706