
Water Body Super-Resolution Mapping Based on Multiple Endmember Spectral Mixture Analysis and Multiscale Spatio-Temporal Dependence


Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area and Data Preparation
2.2. Methodology
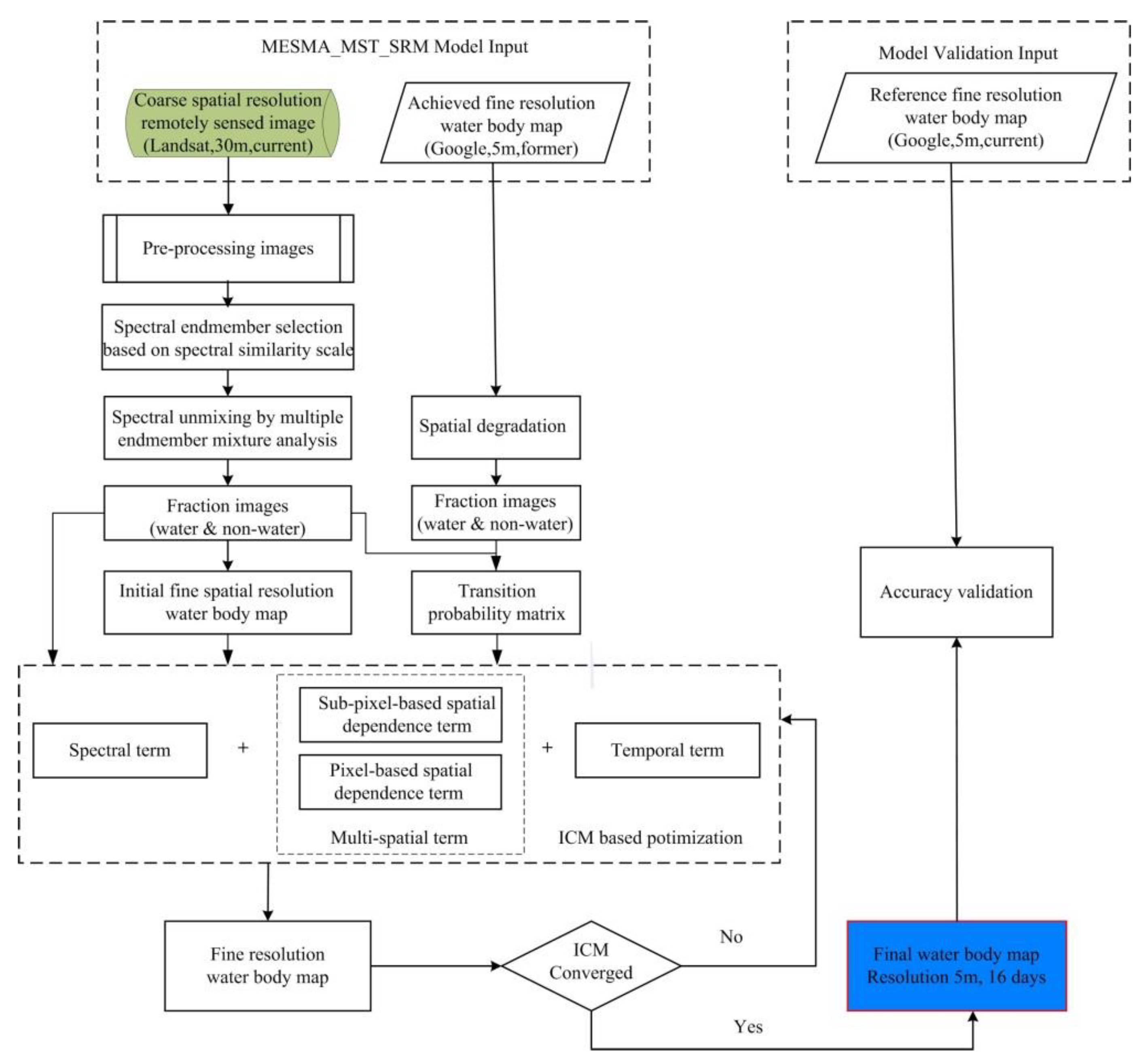
2.2.1. The Framework of MESMA_MST_SRM
2.2.2. Spectral Term on SSS-Based MESMA
2.2.3. Spatial Terms Based on Multiscale Spatiotemporal Dependence
2.2.4. Temporal Term
2.3. Implementation of MESMA_MST_SRM and an Accuracy Evaluation
- (1)
- Preprocess the input images and initialize the parameters of the zoom factor, weight coefficients, and window size.
- (2)
- Choose the optimal endmembers for each pixel of the input image Y based on the SSS algorithm and decompose the input image Y. Then, obtain the fraction image for Y according to the MESMA model. Initialize the super-resolution (SR) map according to the fraction image.
- (3)
- Calculate the transition probability matrix based on Section 2.2.4 for subsequent use.
- (4)
- Update the class label of each subpixel in the SR map iteratively during the process of objective function optimization. The iteration procedure stops when the algorithm converges or reaches the set maximum number of iterations. The final class label is determined in the last iteration.
3. Results
3.1. Model Implementation and Comparative Experiments
3.2. The Results and Analysis
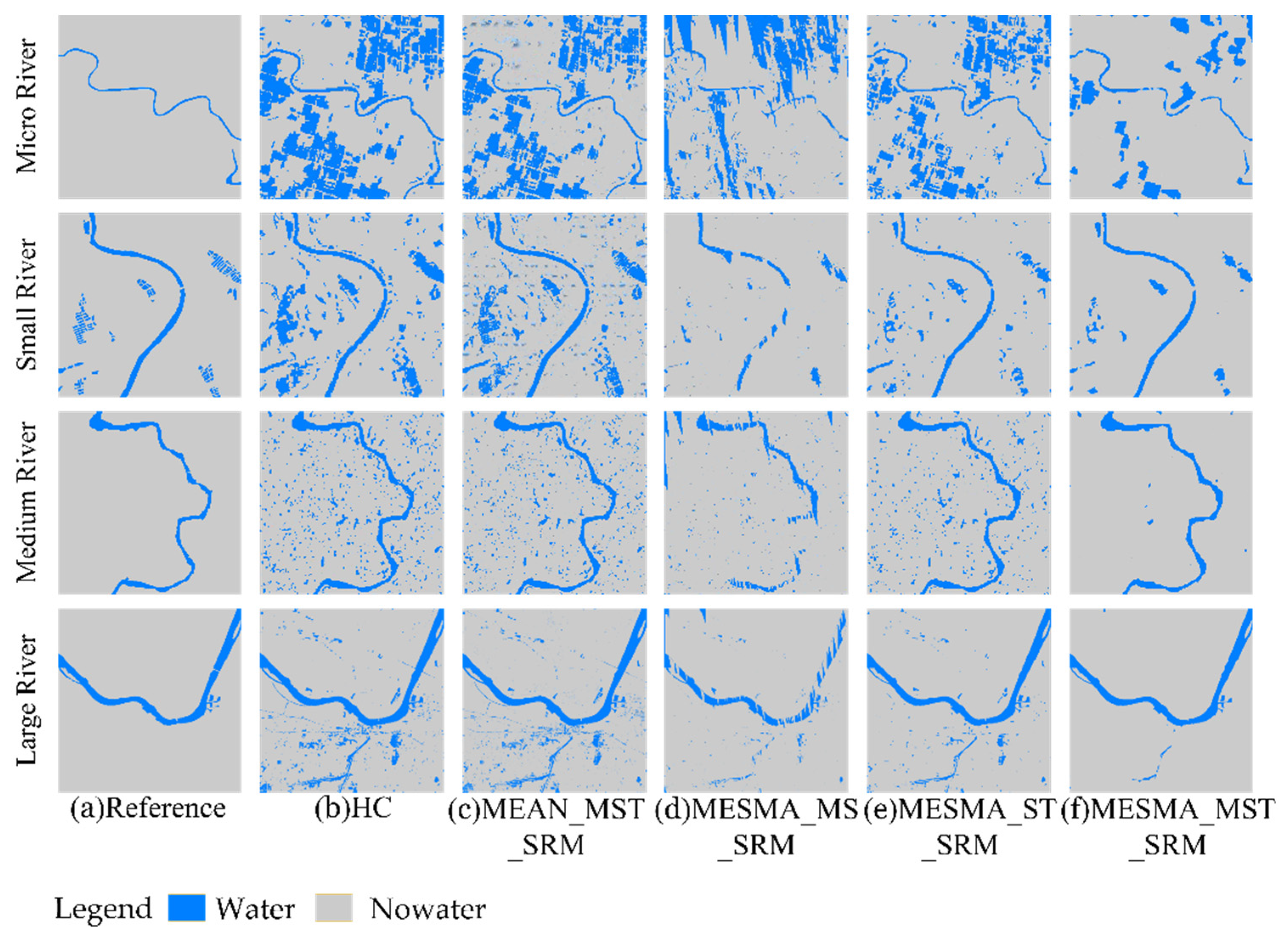
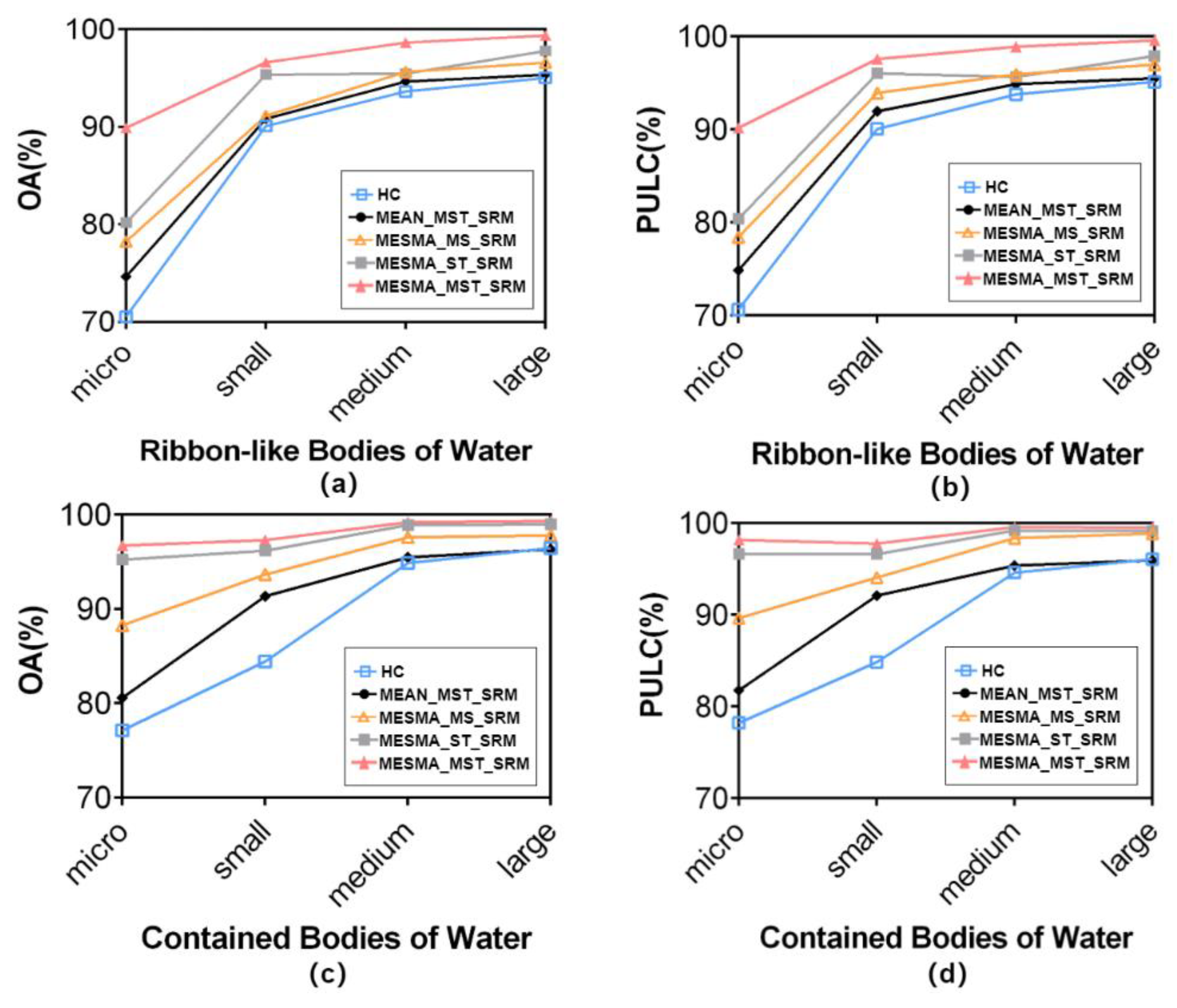
3.2.1. Ribbon-like Bodies of Water
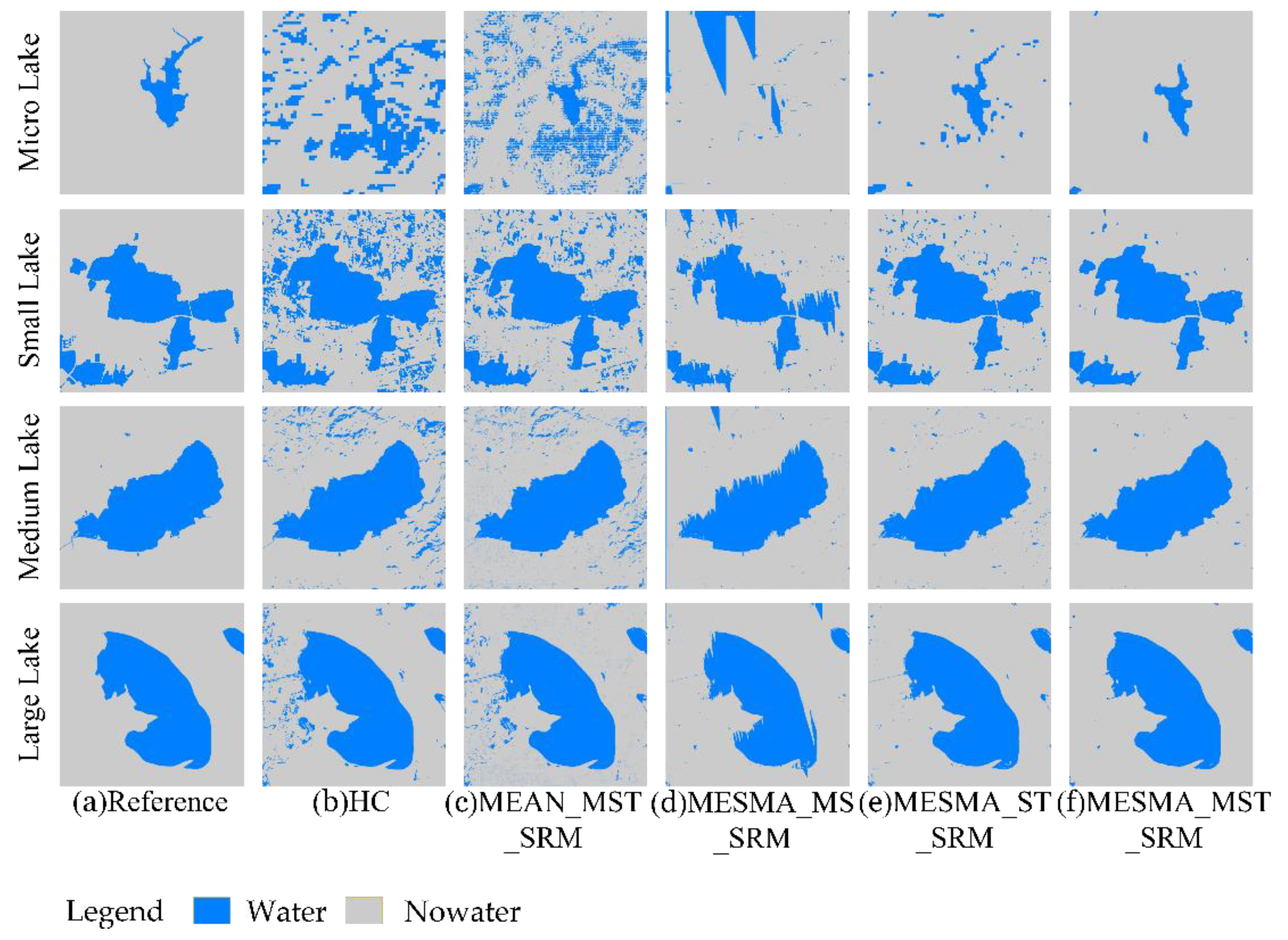
3.2.2. Contained Bodies of Water
4. Discussion
4.1. Effects of the Weighting Coefficients
4.2. Effect of the Water Body Type
4.3. Effect of the Zoom Factor
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Wang, J.; Song, C.; Reager, J.T.; Yao, F.; Famiglietti, J.S.; Sheng, Y.; MacDonald, G.M.; Brun, F.; Schmied, H.M.; Marston, R.A.; et al. Recent global decline in endorheic basin water storages. Nat. Geosci. 2018, 11, 926–932. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Xiao, X.; Zou, Z.; Dong, J.; Qin, Y.; Doughty, R.B.; Menarguez, M.A.; Chen, B.; Wang, J.; Ye, H.; et al. Gainers and losers of surface and terrestrial water resources in China during 1989–2016. Nat. Commun. 2020, 11, 1–12. [Google Scholar] [CrossRef]
- Tzanakakis, V.A.; Paranychianakis, N.V.; Angelakis, A.N.J.W. Water supply and water scarcity. Water 2020, 12, 2347. [Google Scholar] [CrossRef]
- Xu, L.; Abbaszadeh, P.; Moradkhani, H.; Chen, N.; Zhang, X. Continental drought monitoring using satellite soil moisture, data assimilation and an integrated drought index. Remote Sens. Environ. 2020, 250, 112028. [Google Scholar] [CrossRef]
- Wu, J.; Sun, Z. Evaluation of shallow groundwater contamination and associated human health risk in an alluvial plain impacted by agricultural and industrial activities, mid-west China. Expo. Health 2015, 8, 311–329. [Google Scholar] [CrossRef]
- Loucks, D.P.; van Beek, E. Water Resources Planning and Management: An Overview. In Water Resource Systems Planning and Management; Springer: Cham, Switzerland, 2017; pp. 1–49. [Google Scholar]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Ryu, J.H.; Won, J.S.; Min, K.D. Waterline extraction from Landsat TM data in a tidal flat: A case study in Gomso Bay, Korea. Remote Sens. Environ. 2002, 83, 442–456. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, Y.; Ekroos, A.; Hallikainen, M. The role of remote sensing technology in the EU water framework directive (WFD). Environ. Sci. Policy. 2004, 7, 267–276. [Google Scholar] [CrossRef]
- Williamson, C.E.; Saros, J.E.; Vincent, W.F.; Smol, J.P. Lakes and reservoirs as sentinels, integrators, and regulators of climate change. Limnol. Oceanogr. 2009, 54, 2273–2282. [Google Scholar] [CrossRef]
- Birk, S.; Ecke, F. The potential of remote sensing in ecological status assessment of coloured lakes using aquatic plants. Ecol. Indic. 2014, 46, 398–406. [Google Scholar] [CrossRef]
- Reyjol, Y.; Argillier, C.; Bonne, W.; Borja, A.; Buijse, A.D.; Cardoso, A.C.; Daufresne, M.; Kernan, M.; Ferreira, M.T.; Poikane, S.; et al. Assessing the ecological status in the context of the European Water Framework Directive: Where do we go now? Sci. Total Environ. 2014, 497–498, 332–344. [Google Scholar] [CrossRef] [PubMed]
- Acharya, T.D.; Subedi, A.; Lee, D.H. Evaluation of water indices for surface water extraction in a Landsat 8 scene of Nepal. Sensors 2018, 18, 2580. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Yao, F.; Wang, C.; Dong, D.; Luo, J.; Shen, Z.; Yang, K. High-resolution mapping of urban surface water using ZY-3 multi-spectral imagery. Remote Sens. 2015, 7, 12336–12355. [Google Scholar] [CrossRef] [Green Version]
- Acharya, T.D.; Lee, D.H.; Yang, I.T.; Lee, J.K. Identification of water bodies in a Landsat 8 OLI image using a J48 decision tree. Sensors 2016, 16, 1075. [Google Scholar] [CrossRef] [Green Version]
- Rokni, K.; Ahmad, A.; Solaimani, K.; Hazini, S. A new approach for surface water change detection: Integration of pixel level image fusion and image classification techniques. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 226–234. [Google Scholar] [CrossRef]
- Pekel, J.F.; Vancutsem, C.; Bastin, L.; Clerici, M.; Vanbogaert, E.; Bartholomé, E.; Defourny, P. A near real-time water surface detection method based on HSV transformation of MODIS multi-spectral time series data. Remote Sens. Environ. 2014, 140, 704–716. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Huang, S.; Li, J.; Li, X.; Ma, J.; Li, S.; Wang, H. Dynamic monitoring of Poyang Lake water body area using MODIS images between 2000 and 2014. In Proceedings of the International Conference on Intelligent Earth Observing and Applications, Guilin, China, 9 December 2015. [Google Scholar]
- Zhao, J.; Li, J.; Zhang, C.; Du, S.; Yao, Y.; Wang, Q.; Zhao, S. Estimating and Validating Wheat Leaf Water Content with Three MODIS Spectral Indexes: A Case Study in Ningx ia Plain, China. J. Agric. Sci. Technol. 2018, 18, 387–398. [Google Scholar]
- Rao, P.; Jiang, W.; Hou, Y.; Chen, Z.; Jia, K. Dynamic change analysis of surface water in the Yangtze River Basin based on MODIS products. Remote Sens. 2018, 10, 1025. [Google Scholar] [CrossRef] [Green Version]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Tulbure, M.G.; Broich, M.; Stehman, S.V.; Kommareddy, A. Surface water extent dynamics from three decades of seasonally continuous Landsat time series at subcontinental scale in a semi-arid region. Remote Sens. Environ. 2016, 178, 142–157. [Google Scholar] [CrossRef]
- Tao, S.; Fang, J.; Zhao, X.; Zhao, S.; Shen, H.; Hu, H.; Tang, Z.; Wang, Z.; Guo, Q. Rapid loss of lakes on the Mongolian Plateau. Proc. Natl. Acad. Sci. USA 2015, 112, 2281–2286. [Google Scholar] [CrossRef] [Green Version]
- Feng, M.; Sexton, J.O.; Channan, S.; Townshend, J.R. A global, high-resolution (30-m) inland water body dataset for 2000: First results of a topographic–spectral classification algorithm. Int. J. Digit. Earth. 2016, 9, 113–133. [Google Scholar] [CrossRef] [Green Version]
- Yamazaki, D.; Trigg, M.A.; Ikeshima, D. Development of a global~90 m water body map using multi-temporal Landsat images. Remote Sens. Environ. 2015, 171, 337–351. [Google Scholar] [CrossRef]
- Xia, H.; Zhao, J.; Qin, Y.; Yang, J.; Cui, Y.; Song, H.; Ma, L.; Jin, N.; Meng, Q. Changes in water surface area during 1989–2017 in the Huai River Basin using Landsat data and Google earth engine. Remote Sens. 2019, 11, 1824. [Google Scholar] [CrossRef] [Green Version]
- Gao, H.; Birkett, C.; Lettenmaier, D.P. Global monitoring of large reservoir storage from satellite remote sensing. Water Resour. Res. 2012, 48, W09504. [Google Scholar] [CrossRef] [Green Version]
- Foody, G.; Cox, D. Sub-pixel land cover composition estimation using a linear mixture model and fuzzy membership functions. Remote Sens. 1993, 15, 619–631. [Google Scholar] [CrossRef]
- Ling, F.; Boyd, D.; Ge, Y.; Foody, G.M.; Li, X.; Wang, L.; Zhang, Y.; Shi, L.; Shang, C.; Li, X.; et al. Measuring river wetted width from remotely sensed imagery at the subpixel scale with a deep convolutional neural network. Water Resour. Res. 2019, 55, 5631–5649. [Google Scholar] [CrossRef]
- Kasetkasem, T.; Arora, M.K.; Varshney, P.K. Super-resolution land cover mapping using a Markov random field based approach. Remote Sens. Environ. 2005, 96, 302–314. [Google Scholar] [CrossRef]
- Ling, F.; Du, Y.; Xiao, F.; Xue, H.; Wu, S. Super-resolution land-cover mapping using multiple sub-pixel shifted remotely sensed images. Int. J. Remote Sens. 2010, 31, 5023–5040. [Google Scholar] [CrossRef]
- Li, X.; Ling, F.; Foody, G.M.; Ge, Y.; Zhang, Y.; Wang, L.; Shi, L.; Li, X.; Du, Y. Spatial-temporal super-resolution land cover mapping with a local spatial-temporal dependence model. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4951–4966. [Google Scholar] [CrossRef]
- Ling, F.; Li, X.; Du, Y.; Xiao, F. Super-resolution land cover mapping with spatial–temporal dependence by integrating a former fine resolution map. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1816–1825. [Google Scholar] [CrossRef]
- Li, X.; Du, Y.; Ling, F. Super-resolution mapping of forests with bitemporal different spatial resolution images based on the spatial-temporal Markov random field. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 7, 29–39. [Google Scholar] [CrossRef]
- Li, L.; Chen, Y.; Xu, T.; Liu, R.; Shi, K.; Huang, C. Super-resolution mapping of wetland inundation from remote sensing imagery based on integration of back-propagation neural network and genetic algorithm. Remote Sens. Environ. 2015, 164, 142–154. [Google Scholar] [CrossRef]
- Ling, F.; Xiao, F.; Du, Y.; Xue, H.; Ren, X. Waterline mapping at the subpixel scale from remote sensing imagery with high-resolution digital elevation models. Int. J. Remote Sens. 2008, 29, 1809–1815. [Google Scholar] [CrossRef]
- Zhang, Y.; Atkinson, P.M.; Li, X.; Ling, F.; Wang, Q.; Du, Y. Learning-based spatial–temporal super-resolution mapping of forest cover with modis images. IEEE Trans. Geosci. Remote Sens. 2016, 55, 600–614. [Google Scholar] [CrossRef]
- Ling, F.; Li, X.; Foody, G.M.; Boyd, D.; Ge, Y.; Li, X.; Du, Y. Monitoring surface water area variations of reservoirs using daily MODIS images by exploring sub-pixel information. ISPRS J. Photogramm. Remote Sens. 2020, 168, 141–152. [Google Scholar] [CrossRef]
- Yang, X.; Li, Y.; Wei, Y.; Chen, Z.; Xie, P. Water Body Extraction from Sentinel-3 Image with Multiscale Spatiotemporal Super-Resolution Mapping. Water 2020, 12, 2605. [Google Scholar] [CrossRef]
- Tran, H.; Nguyen, P.; Ombadi, M.; Hsu, K.; Sorooshian, S.; Andreadis, K. Improving hydrologic modeling using cloud-free MODIS flood maps. J. Hydrometeorol. 2019, 20, 2203–2214. [Google Scholar] [CrossRef] [Green Version]
- Osorio, J.D.G.; Galiano, S.G.G. Development of a sub-pixel analysis method applied to dynamic monitoring of floods. Int. J. Remote Sens. 2011, 33, 2277–2295. [Google Scholar] [CrossRef]
- Mertens, K.C.; de Baets, B.; Verbeke, L.P.; de Wulf, R.R. A sub-pixel mapping algorithm based on sub-pixel/pixel spatial attraction models. Int. J. Remote Sens. 2007, 27, 3293–3310. [Google Scholar] [CrossRef]
- Zhang, Y.; Du, Y.; Ling, F.; Wang, X.; Li, X. Spectral–spatial based sub-pixel mapping of remotely sensed imagery with multi-scale spatial dependence. Int. J. Remote Sens. 2015, 36, 2831–2850. [Google Scholar] [CrossRef]
- Roberts, D.A.; Gardner, M.; Church, R.; Ustin, S.; Scheer, G.; Green, R. Mapping chaparral in the Santa Monica Mountains using multiple endmember spectral mixture models. Remote Sens. Environ. 1998, 65, 267–279. [Google Scholar] [CrossRef]
- Franke, J.; Roberts, D.A.; Halligan, K.; Menz, G. Hierarchical multiple endmember spectral mixture analysis (MESMA) of hyperspectral imagery for urban environments. Remote Sens. Environ. 2009, 113, 1712–1723. [Google Scholar] [CrossRef]
- Fernandez-Manso, A.; Quintano, C.; Roberts, D.A. Burn severity influence on post-fire vegetation cover resilience from Landsat MESMA fraction images time series in Mediterranean forest ecosystems. Remote Sens. Environ. 2016, 184, 112–123. [Google Scholar] [CrossRef]
- Fan, F.; Deng, Y. Enhancing endmember selection in multiple endmember spectral mixture analysis (MESMA) for urban impervious surface area mapping using spectral angle and spectral distance parameters. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 290–301. [Google Scholar] [CrossRef]
- Bartout, P.; Touchart, L.; Terasmaa, J.; Choffel, Q.; Marzecova, A.; Koff, T.; Kapanen, G.; Qsair, Z.; Maleval, V.; Millot, C.; et al. A new approach to inventorying bodies of water, from local to global scale. Erde 2015, 146, 245–258. [Google Scholar]
- Downing, J.A. Emerging global role of small lakes and ponds: Little things mean a lot. Limnetica. 2009, 29, 9–24. [Google Scholar] [CrossRef]
- Minns, C.K.; Moore, J.E.; Shuter, B.J.; Mandrak, N.E. A preliminary national analysis of some key characteristics of Canadian lakes. Can. J. Fish. Aquat. Sci. 2008, 65, 1763–1778. [Google Scholar] [CrossRef] [Green Version]
- Downing, J.A.; Prairie, Y.T.; Cole, J.J.; Duarte, C.M.; Tranvik, L.J.; Striegl, R.G.; McDowell, W.H.; Kortelainen, P.; Caraco, N.F.; Melack, J.M.; et al. The global abundance and size distribution of lakes, ponds, and impoundments. Limnol. Oceanogr. 2006, 51, 2388–2397. [Google Scholar] [CrossRef] [Green Version]
- Granahan, J.; Sweet, J. An evaluation of atmospheric correction techniques using the spectral similarity scale. In Proceedings of the International Geoscience and Remote Sensing Symposium, Sydney, NSW, Australia, 9–13 July 2001; pp. 2022–2024. [Google Scholar]
- Park, S.C.; Park, M.K.; Kang, M.G. Super-resolution image reconstruction: A technical overview. IEEE Signal Process. Mag. 2003, 20, 21–36. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water Name | Size | Data Source | Width/Areas | Location |
|---|---|---|---|---|
| Tongshun River | Micro | Landsat-8, 2019 | 113°34′53.04″E 30°10′27.90″N | |
| Google Earth, 2014 | approximately 50 m | |||
| Google Earth, 2019 | ||||
| Lanxi River | Small | Landsat-8, 2019 | 112°28′11.48″E 28°37′21.69″N | |
| Google Earth, 2016 | approximately 140 m | |||
| Google Earth, 2019 | ||||
| Sheshui River | Medium | Landsat-8, 2018 | 114°23′41.75″E 30°56′57.32″N | |
| Google Earth, 2011 | approximately 190 m | |||
| Google Earth, 2018 | ||||
| Huaihe River | Large | Landsat-8, 2019 | 117°37′54.57″E 32°55′8.53″N | |
| Google Earth, 2013 | approximately 490 m | |||
| Google Earth, 2019 | ||||
| Xipenghe Lake | Micro | Landsat-8, 2018 | 115°42′31.98″E 30°8′54.76″N | |
| Google Earth, 2014 | approximately 0.3 km2 | |||
| Google Earth, 2018 | ||||
| South Lake | Small | Landsat-8, 2021 | 114°21′20.47″E 30°29′38.36″N | |
| Google Earth, 2013 | approximately 7.6 km2 | |||
| Google Earth, 2021 | ||||
| Qilu Lake | Medium | Landsat-8, 2020 | 102°46′19.02″E 24°9′57.29″N | |
| Google Earth, 2014 | approximately 36.73 km2 | |||
| Google Earth, 2020 | ||||
| Koruk Lake | Large | Landsat-8, 2018 | 124°6′6.66″E 46°17′7.11″N | |
| Google Earth, 2010 | approximately 57 km2 | |||
| Google Earth, 2018 |
| Water Body | Size | Methods | OA (%) | PULC (%) | Improvement Rate of OA |
|---|---|---|---|---|---|
| Tongshun River | Micro | HC | 70.5453 | 70.6387 | 27.45% |
| MEAN_MST_SRM | 74.6499 | 74.8682 | 20.44% | ||
| MESMA_MS_SRM | 78.2406 | 78.4297 | 14.91% | ||
| MESMA_ST_SRM | 80.1706 | 80.3777 | 12.15% | ||
| MESMA_MST_SRM | 89.9099 | 90.1757 | |||
| Lanxi River | Small | HC | 90.0702 | 90.0727 | 7.31% |
| MEAN_MST_SRM | 90.8186 | 91.9738 | 6.43% | ||
| MESMA_MS_SRM | 91.1336 | 93.9328 | 6.06% | ||
| MESMA_ST_SRM | 95.3435 | 96.0259 | 1.38% | ||
| MESMA_MST_SRM | 96.6562 | 97.5770 | |||
| Sheshui River | Medium | HC | 93.6288 | 93.7871 | 5.35% |
| MEAN_MST_SRM | 94.6548 | 94.8756 | 4.21% | ||
| MESMA_MS_SRM | 95.6489 | 95.9294 | 3.12% | ||
| MESMA_ST_SRM | 95.4644 | 95.6614 | 3.32% | ||
| MESMA_MST_SRM | 98.6365 | 98.9025 | |||
| Huaihe River | Large | HC | 95.0176 | 95.1362 | 4.58% |
| MEAN_MST_SRM | 95.3458 | 95.5037 | 4.22% | ||
| MESMA_MS_SRM | 96.5837 | 96.9838 | 2.89% | ||
| MESMA_ST_SRM | 97.7844 | 97.9114 | 1.62% | ||
| MESMA_MST_SRM | 99.3722 | 99.5896 |
| Water Body | Size | Methods | OA(%) | PULC(%) | Improvement Rate of OA |
|---|---|---|---|---|---|
| Xipenghe Lake | Micro | HC | 77.1429 | 78.2433 | 25.41% |
| MEAN_MST_SRM | 80.5981 | 81.7772 | 20.03% | ||
| MESMA_MS_SRM | 88.2885 | 89.6616 | 9.58% | ||
| MESMA_ST_SRM | 95.2421 | 96.6372 | 1.58% | ||
| MESMA_MST_SRM | 96.7438 | 98.1904 | |||
| South Lake | Small | HC | 84.4461 | 84.8558 | 15.24% |
| MEAN_MST_SRM | 91.3524 | 92.1102 | 6.53% | ||
| MESMA_MS_SRM | 93.6517 | 94.0979 | 3.91% | ||
| MESMA_ST_SRM | 96.1812 | 96.6301 | 1.18% | ||
| MESMA_MST_SRM | 97.3166 | 97.7965 | |||
| Qilu Lake | Medium | HC | 94.8827 | 94.6128 | 4.56% |
| MEAN_MST_SRM | 95.4953 | 95.3970 | 3.89% | ||
| MESMA_MS_SRM | 97.6242 | 98.3781 | 1.62% | ||
| MESMA_ST_SRM | 98.9134 | 99.2161 | 0.30% | ||
| MESMA_MST_SRM | 99.2094 | 99.5901 | |||
| Koruk Lake | Large | HC | 96.4586 | 96.0782 | 2.97% |
| MEAN_MST_SRM | 96.3385 | 95.9702 | 3.10% | ||
| MESMA_MS_SRM | 97.8155 | 98.8887 | 1.54% | ||
| MESMA_ST_SRM | 98.9866 | 99.1716 | 0.34% | ||
| MESMA_MST_SRM | 99.3254 | 99.5352 |
| Result Statistic | β | 0 | 0.1 | 1 | 10 | 100 | 1000 | 2500 | 5000 | |
|---|---|---|---|---|---|---|---|---|---|---|
| α | ||||||||||
| OA | 0 | 95.5896 | 95.5896 | 95.5921 | 95.5897 | 95.6162 | 95.6508 | 95.6601 | 95.6628 | |
| 0.1 | 95.5896 | 95.5896 | 95.5896 | 95.5897 | 95.6162 | 95.6508 | 95.6601 | 95.6653 | ||
| 1 | 95.5896 | 95.5896 | 95.5896 | 95.5897 | 95.6163 | 95.6533 | 95.6601 | 95.6653 | ||
| 10 | 95.6024 | 95.6024 | 95.6024 | 95.6000 | 95.6290 | 95.6633 | 95.6626 | 95.6653 | ||
| 100 | 95.8253 | 95.8253 | 95.8253 | 95.8193 | 95.7825 | 95.6953 | 95.6774 | 95.6754 | ||
| 1000 | 93.8795 | 93.8867 | 92.5871 | 93.6866 | 94.1810 | 95.9334 | 95.7849 | 95.7354 | ||
| 8000 | 92.8053 | 93.2300 | 93.2627 | 93.3254 | 95.1838 | 96.9842 | 97.3166 | 96.1024 | ||
| 10,000 | 89.5710 | 89.7332 | 89.7345 | 89.8613 | 93.1512 | 96.0437 | 97.0149 | 96.2980 | ||
| PULC | 0 | 96.4538 | 96.4538 | 96.4564 | 96.4541 | 96.4849 | 96.5313 | 96.5385 | 96.5418 | |
| 0.1 | 96.4538 | 96.4538 | 96.4538 | 96.4541 | 96.4849 | 96.5313 | 96.5385 | 96.5444 | ||
| 1 | 96.4538 | 96.4538 | 96.4538 | 96.4541 | 96.4850 | 96.5339 | 96.5385 | 96.5444 | ||
| 10 | 96.4674 | 96.4674 | 96.4674 | 96.4650 | 96.4958 | 96.5419 | 96.5412 | 96.5444 | ||
| 100 | 96.7003 | 96.7003 | 96.7003 | 96.6945 | 96.6631 | 96.5764 | 96.5573 | 96.5552 | ||
| 1000 | 95.7443 | 95.7517 | 94.7810 | 95.6305 | 96.0654 | 96.8272 | 96.6762 | 96.6237 | ||
| 8000 | 94.6713 | 94.5858 | 94.6237 | 95.2057 | 96.9237 | 97.1753 | 97.7965 | 97.0087 | ||
| 10,000 | 90.7241 | 90.6791 | 90.6807 | 90.8499 | 94.6768 | 97.7813 | 97.7104 | 97.2219 | ||
| Zoom Factor | Methods | OA(%) | PULC(%) |
|---|---|---|---|
| 3 | HC | 84.6631 | 85.2712 |
| MEAN_MST_SRM | 92.1497 | 92.6145 | |
| MESMA_MS_SRM | 94.5014 | 95.1588 | |
| MESMA_ST_SRM | 97.0728 | 97.8206 | |
| MESMA_MST_SRM | 97.7431 | 98.4702 | |
| 6 | HC | 84.4461 | 84.8558 |
| MEAN_MST_SRM | 91.3524 | 92.1102 | |
| MESMA_MS_SRM | 93.6517 | 94.0979 | |
| MESMA_ST_SRM | 96.1812 | 96.6301 | |
| MESMA_MST_SRM | 97.3166 | 97.7965 | |
| 15 | HC | 84.7554 | 85.2854 |
| MEAN_MST_SRM | 87.0484 | 87.6874 | |
| MESMA_MS_SRM | 93.0802 | 93.6677 | |
| MESMA_ST_SRM | 96.2258 | 96.9416 | |
| MESMA_MST_SRM | 96.4091 | 97.1303 | |
| 30 | HC | 84.8182 | 85.4167 |
| MEAN_MST_SRM | 86.3342 | 86.9416 | |
| MESMA_MS_SRM | 87.9559 | 88.6381 | |
| MESMA_ST_SRM | 96.0514 | 96.9457 | |
| MESMA_MST_SRM | 96.1906 | 97.0985 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Chu, Q.; Wang, L.; Yu, M. Water Body Super-Resolution Mapping Based on Multiple Endmember Spectral Mixture Analysis and Multiscale Spatio-Temporal Dependence. Remote Sens. 2022, 14, 2050. https://doi.org/10.3390/rs14092050
Yang X, Chu Q, Wang L, Yu M. Water Body Super-Resolution Mapping Based on Multiple Endmember Spectral Mixture Analysis and Multiscale Spatio-Temporal Dependence. Remote Sensing. 2022; 14(9):2050. https://doi.org/10.3390/rs14092050
Chicago/Turabian StyleYang, Xiaohong, Qiannian Chu, Lizhe Wang, and Menghui Yu. 2022. "Water Body Super-Resolution Mapping Based on Multiple Endmember Spectral Mixture Analysis and Multiscale Spatio-Temporal Dependence" Remote Sensing 14, no. 9: 2050. https://doi.org/10.3390/rs14092050
APA StyleYang, X., Chu, Q., Wang, L., & Yu, M. (2022). Water Body Super-Resolution Mapping Based on Multiple Endmember Spectral Mixture Analysis and Multiscale Spatio-Temporal Dependence. Remote Sensing, 14(9), 2050. https://doi.org/10.3390/rs14092050