
Development of a UAV-Based Gamma Spectrometry System for Natural Radionuclides and Field Tests at Central Asian Uranium Legacy Sites

Abstract
:
1. Introduction
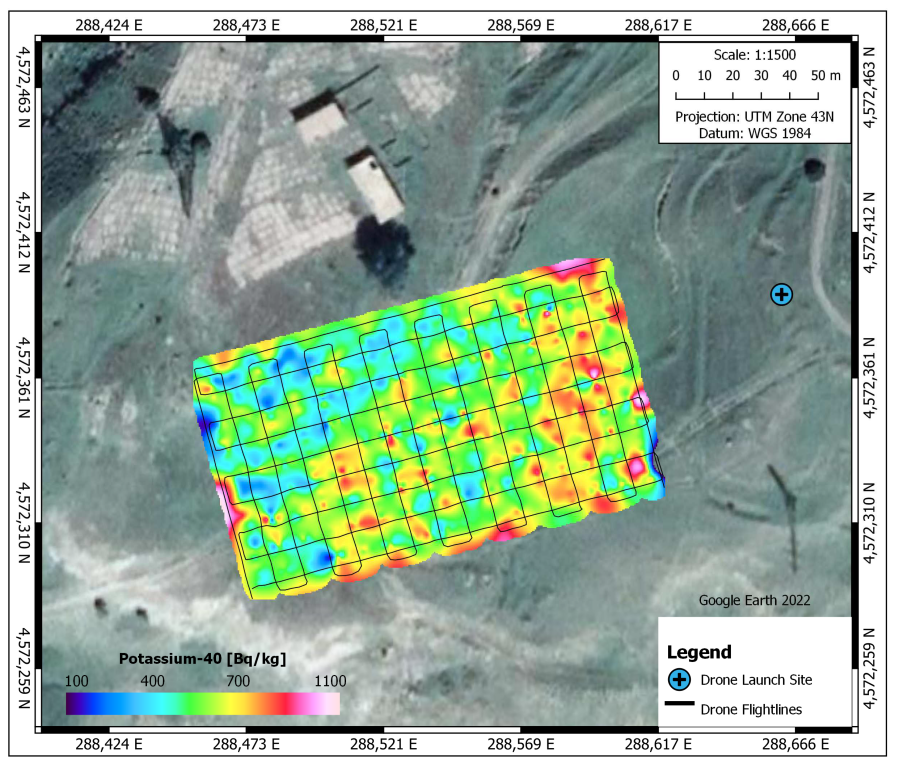
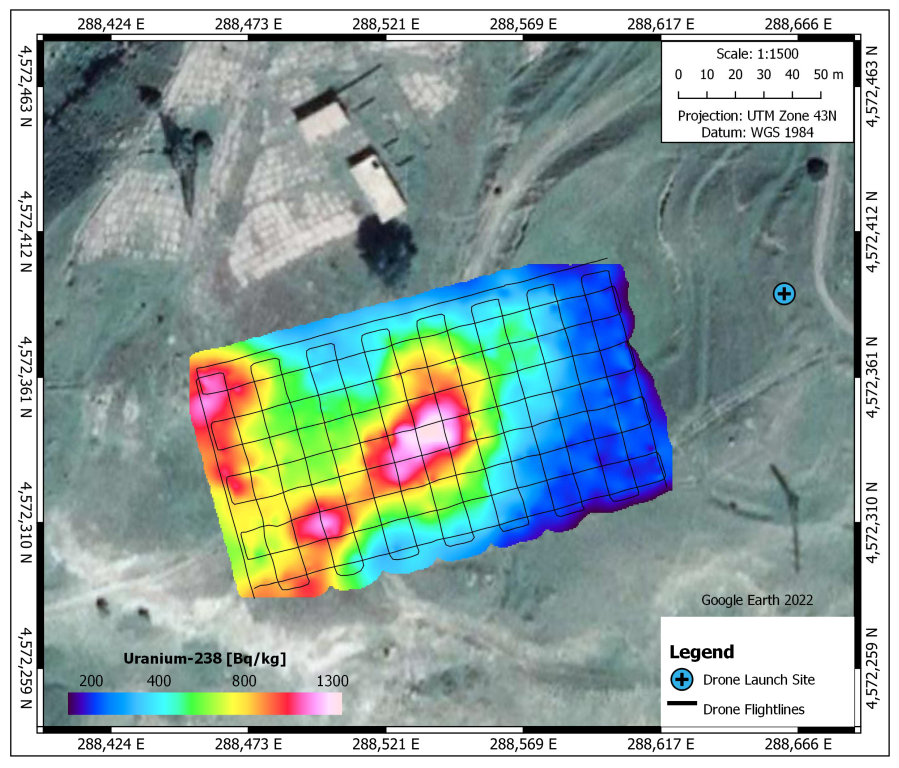
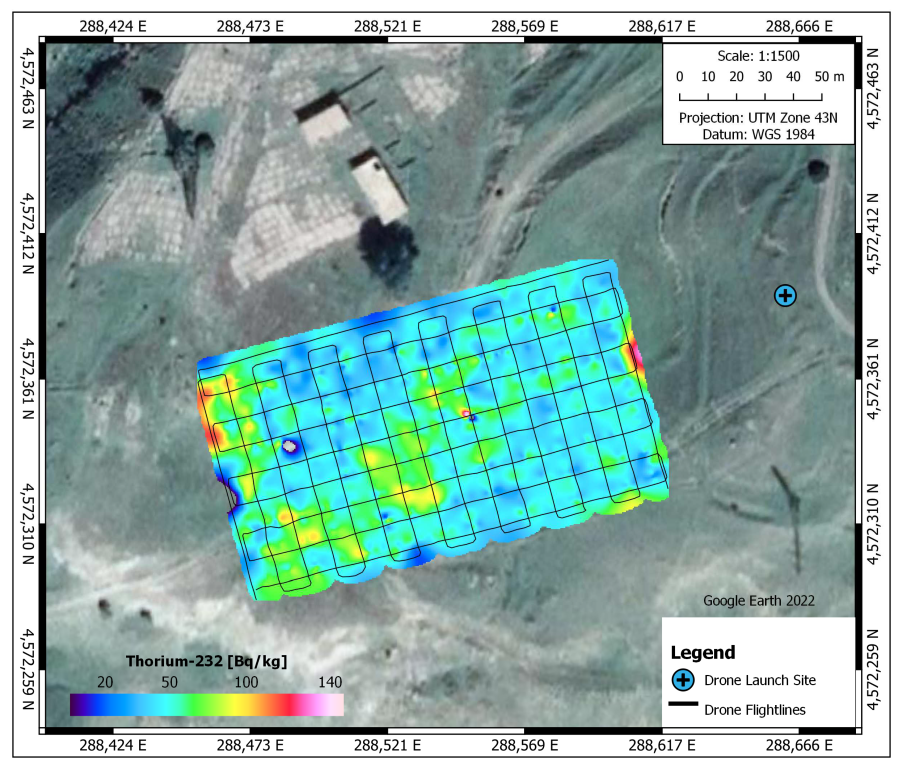
- Following the conceptual part, Section 6 presents the results of the survey flights, including maps of the activity distribution of the nuclides of the U-238, Th-232 series, and K-40, respectively, on selected ULSs in Mailuu Suu (Kyrgyzstan);
- Finally, Section 7 provides a summary and our main conclusions on the conditions under which ULS-based gamma spectrometry brings to bear its advantages most effectively.
2. Conceptual Considerations of UAV-Based Gamma Spectrometry for ULS
2.1. Operation of UAV
2.2. Spatial Resolution of UAV-Based Gamma Spectrometry
2.3. Logistical and Administrative Considerations
3. Description of the UAV Developed in the Project
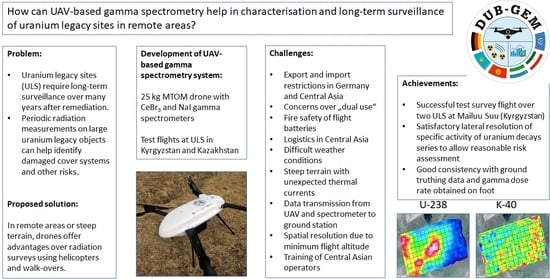
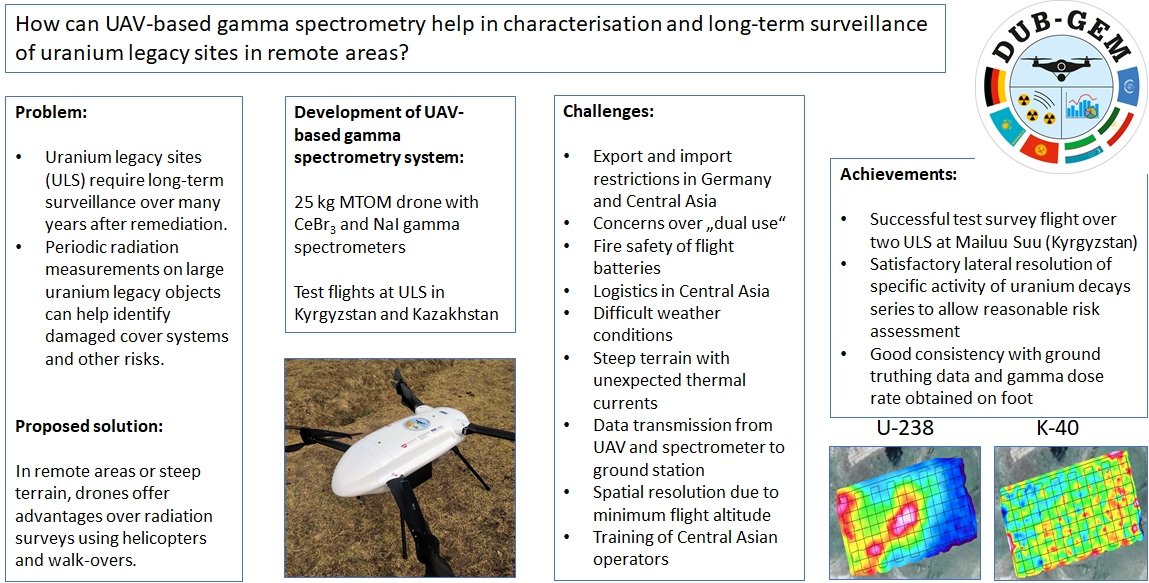
- Battery powered vs. combustion engines: Combustion engines were initially investigated as potential alternative to battery powered systems but were discarded early in the development process due to restrictions on transportation and fire safety, especially in a crash scenario and dual-use concerns (long flight times). Electrical motors are superior to combustion engines in terms of reliability and maintenance requirements. In addition, combustion engines were not considered environmentally friendly;
- Fixed wing vs. copter design: Multi-copter, Vertical Take-Off and Landing (VTOL) systems and fixed-wing systems have been considered during the conceptual phase. However, VTLO and fixed-wing systems are not well suited to very low ground speed and to hovering in order to investigate individual radiation hot spots on the ground, which was one of the key objectives of this project;
- Quadrocopter vs. hexacopter vs. octocopter: Based on the experience of the UAV developer team, octocopters provide the best redundancy, therefore this option was eventually preferred. Each of the four arms carries two coaxial motors, so that only four arms are necessary and frame mass is minimised.
- Length of the body: 1.6 m;
- Overall dimensions with propellers: 2.2 m;
- MTOM: 25 kg;
- Maximum payload: 7 kg;
- Redundant propulsion systems;
- Operating temperature: 0 °C to +45 °C;
- Wind stability: 12 m/s (incl. wind gusts).
- Global Navigation Satellite System (GNSS);
- Compass;
- Triple redundant inertial measurement unit (IMU) and gyro sensors;
- Laser range finder (LRF);
- Temperature and pressure sensors;
- First person view (FPV) camera.
- 868 MHz;
- 2.4 GHz (triple redundant);
- Universal Mobile Telecommunications System (UMTS) 4G/3G/2G;
- 5.9 GHz.
4. Description of the Gamma Spectrometers
4.1. Detectors Used
4.2. Calibration
5. Data Processing and Presentation of Results
- Total count rates of the spectrometer are transmitted by the UAV in real time to generate a live “radiation heatmap” during the flight operation. This requires only a limited bandwidth of the data link between the operator and the UAV-based gamma detector, however allows the operator to focus on areas with high activity during the flight (e.g., by hovering over the hot spot);
- Due to bandwidth limitations of the data link, the detailed spectrum analysis is carried out after landing. During the flight, raw spectra, GPS data, and time stamps are recorded on a USB device which can be removed from the spectrometer and read-out and processed by a laptop computer.
- Homogeneous vertical extension of the specific activity to infinite depth;
- Homogeneous lateral extension of the specific activity within the detector footprint;
- Bulk density of the soil of 2.32 g/cm3;
- Secular equilibrium of all nuclides within the U-238 and Th-232 decay chains, respectively.
6. Field Tests of the UAV-Based Gamma Spectrometry System in Central Asia
6.1. Investigation Area
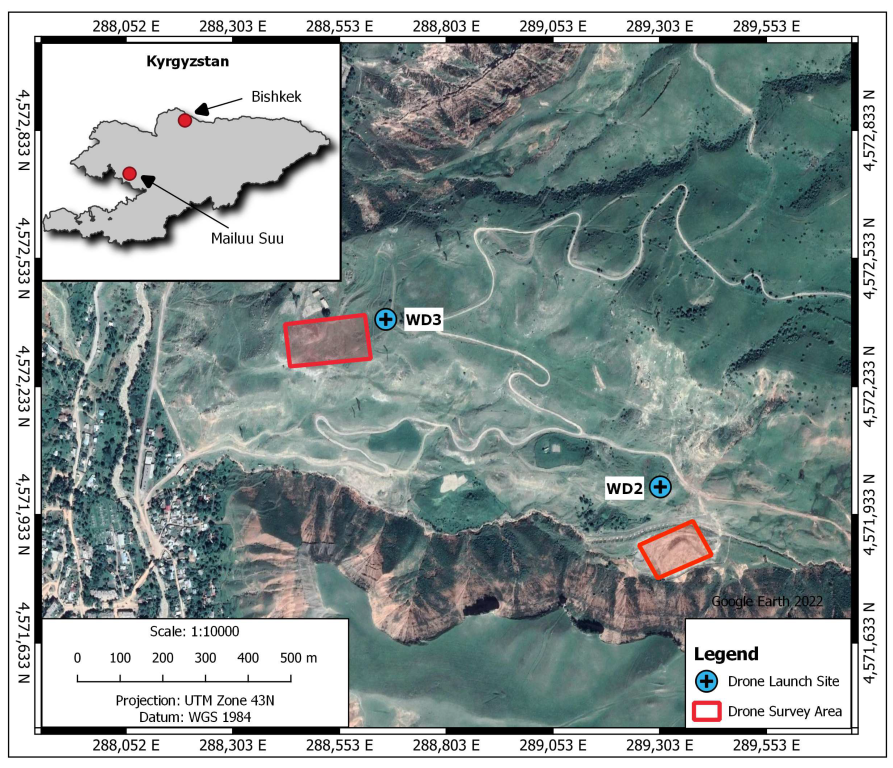
- Mailuu Suu in southern Kyrgyzstan;
- Waste rock dump No. 2 (WD2) in the Kulmensay valley;
- Waste rock dump No. 3 (WD3) northwest of dump No. 2 on a high plain above the Mailuu Suu River.
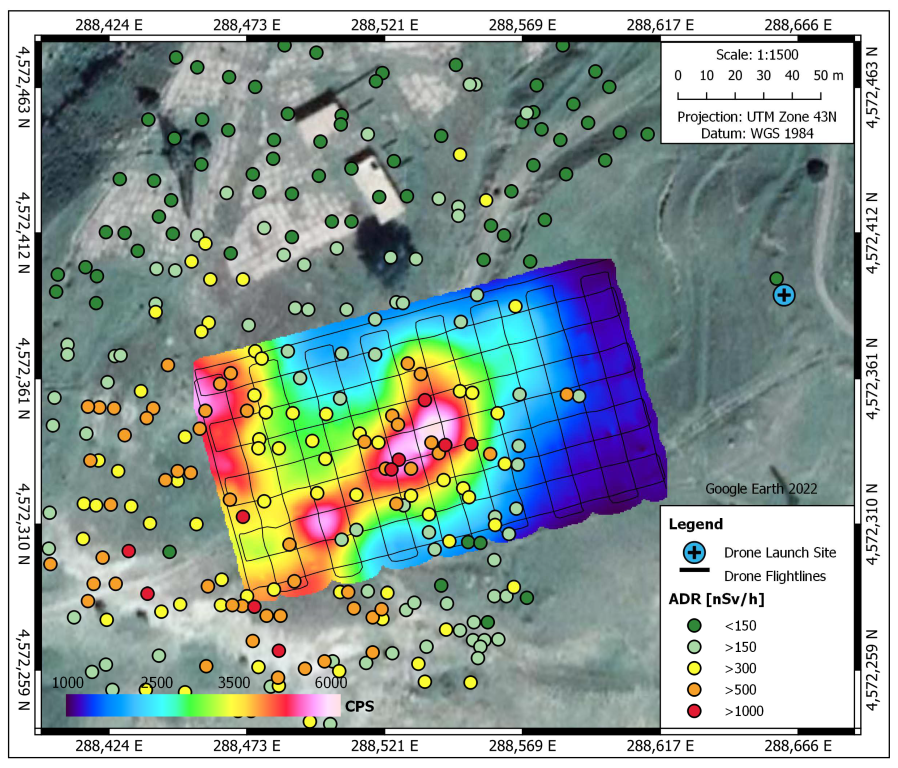
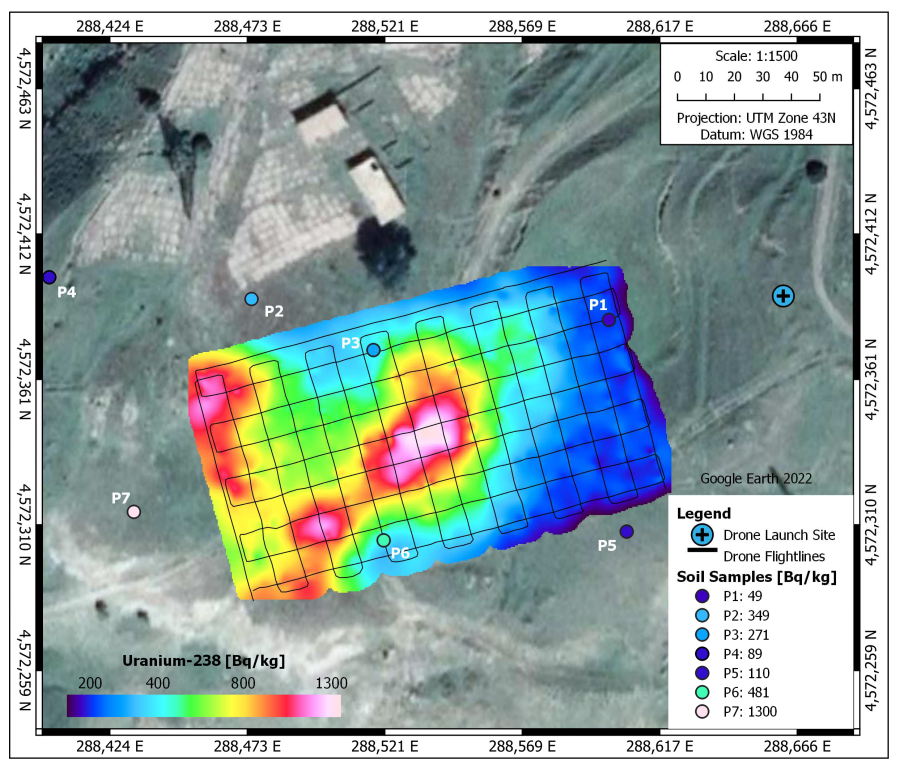
6.2. Results
6.3. Discussion and Interpretation of the Results
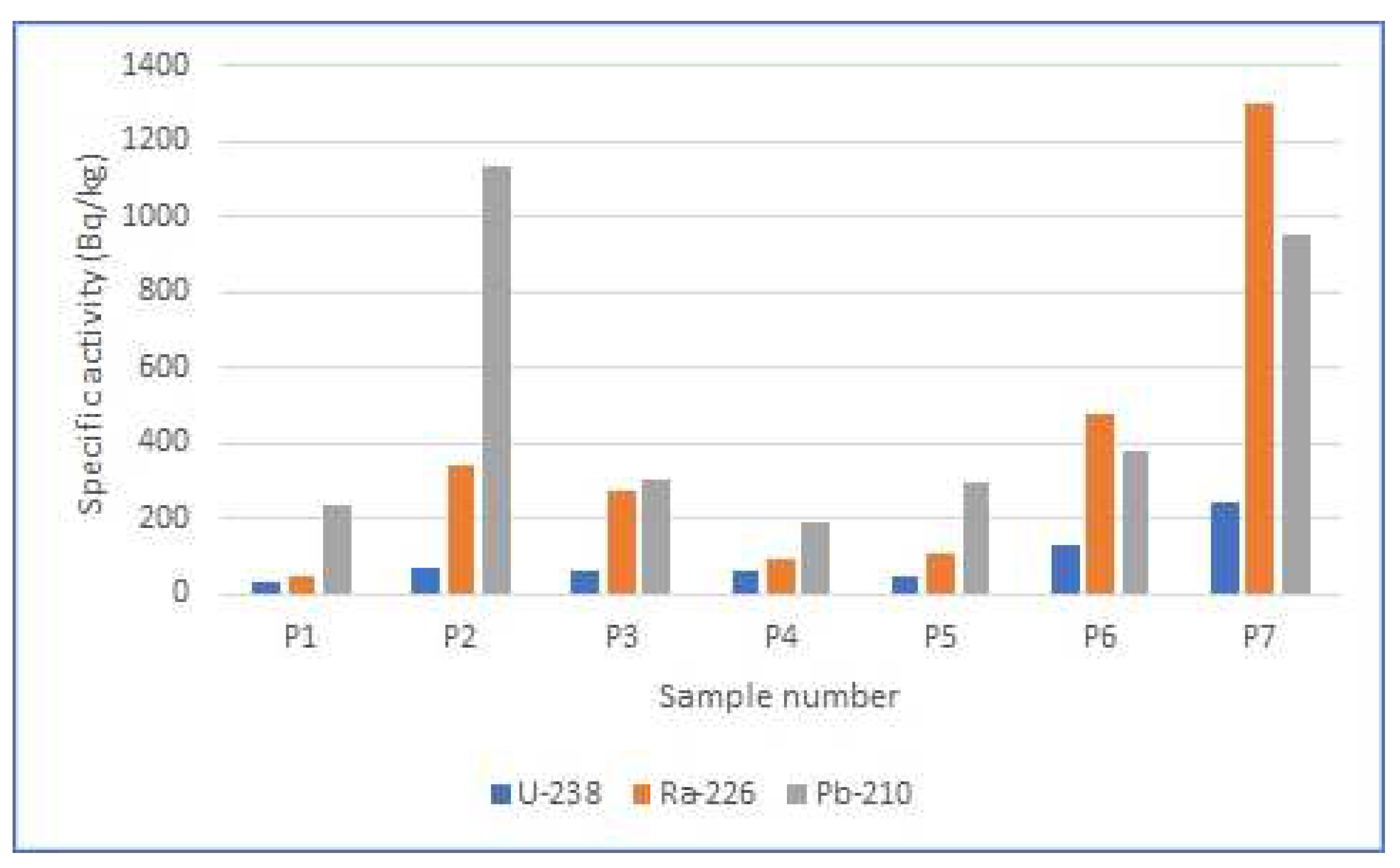
- Due to the disequilibrium, the results calculated from the UAV-based gamma spectra in this particular case of waste from mine no. 6 relate to Ra-226, rather than U-238. The waste at WD3 may also contain some tailings material due to the close proximity of a tailings pond (TP11). Erosion over the past decades may have washed tailings downhill, or tailings have been co-disposed with waste rock during active mining production. The latter scenario appears more plausible, since tailings (including TP11) have been covered with inert soil, and both a visual check of the soil cover and walk-over gamma surveys in 2019 [80] and in 2021 by the authors confirmed that the cover is largely intact;
- On maps generated using UAV-based data, areas of homogeneously distributed increased specific activity cannot be distinguished from highly mineralised pieces of rock that are typical of ULS waste rock dumps. The latter appear as areal sources due to the limited spatial resolution and the interpolation procedure;
- If not systematically carried out on a dense, regular grid, walk-over gamma surveys may miss out on hot spots, such as the patch in the centre of the investigation area;
- By contrast, the averaging procedure of the UAV-based gamma spectrometry tends to underestimate the specific activity in hot spots if there are significant spatial inhomogeneities of the specific activity.
7. Summary and Conclusions
- The impact of strong disequilibria between nuclides of the same decay chain (U-238 in the case of the Mailuu Suu ULS) on the calculation procedure must be investigated in order to more reliably determine the specific activity of the material on the ground;
- Correction of the impact of soil moisture on the gamma spectra and the subsequent calculation algorithms is a decisive factor for the reliability of the results. This is an area where significant research is currently ongoing. For the time being, empirical correction factors should be used, which must be obtained on a site-specific basis, taking into account local soil characteristics;
- Such correction procedures are particularly important for the comparison of results from repeated surveys (e.g., annual flyovers as part of a long-term institutional control programme of remediated ULSs) and the conclusions drawn on the potential evolution of erosion or contamination patterns;
- Due to the limited spatial resolution of drone-based data, areas of homogeneously distributed increased specific activity cannot be distinguished from highly mineralised pieces of rock that are typical of ULSs;
- Currently, there are no data available on the repeatability of the UAV-based survey results. This requires repeated survey flights of the same ULS objects over an extended period of time. Suitable arrangements must be found with the ULSs’ owners/operators in the Central Asian countries, which in turn requires additional funding.
- One UAV could be used with several detectors, including cameras for landslide observation within the national emergency preparedness and response programme, or other radiation detectors for the identification of orphan sources within a national nuclear safety programme;
- Several countries in the region (Central Asia, or other regions) with the same challenges in the context of ULSs may share one UAV system for long-term surveillance;
- Renting out the system to private customers, e.g., with the need for industrial inspection, possibly as a package with piloting the drone, may recoup some of the cost.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADR | Ambient dose rate of gamma radiation |
| AGL | Above ground level |
| BGR | Bundesanstalt für Geowissenschaften und Rohstoffe (Federal Agency for Geosciences and Resources) |
| CGULS | Co-Ordination Group of Uranium Legacy Sites |
| DUB-GEM | Development of a UAV-Based Gamma spectrometry for the Exploration and Monitoring of Uranium Mining Legacies (project acronym) |
| EASA | European Union Aviation Safety Agency |
| EBRD | European Bank for Reconstruction and Development |
| EC | European Commission |
| ERA | Environmental Remediation Fund |
| FPV | First Person View |
| FSA | Full spectrum analysis |
| FWHM | Full width at half maximum |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| HPGe | High purity Germanium |
| IAEA | International Atomic Energy Agency |
| IMU | Inertial measurement unit |
| INSC | Instrument for Nuclear Safety Co-Operation |
| LiPo | Lithium polymer |
| LRF | Laser Range Finder |
| LTE | Long-term evolution mobile communications standard |
| MTOM | Maximum take-off mass |
| SMP | Strategic Management Plan |
| UAV | Unmanned Aerial Vehicle |
| ULSs | Uranium legacy sites |
| UMTS | Universal Mobile Telecommunications System |
| USB | Universal serial bus |
| VLOS | Visual line of sight |
| VTOL | Vertical take of and landing |
| WD | Waste dump |
| XRF | X-ray fluorescence |
References
- Dubot, D. In situ methods for characterization of contaminated Sites. In Proceedings of the Technical Meeting on In-Situ Methods for Characterization of Contaminated Sites, IAEA, Vienna, Austria, 5–9 July 2010; Available online: http://www-pub.iaea.org/MTCD/Meetings/PDFplus/2010/38924/TM-38924/Presentations/Dubot.pdf (accessed on 23 October 2021).
- da Silva, N.C. Use of in-situ gamma spectrometry for environmental monitoring of a former disposal site of by product from monazite chemical processing. In Proceedings of the Technical Meeting on In-Situ Methods for Characterization of Contaminated Sites, IAEA, Vienna, Austria, 5–9 July 2010; Available online: http://www-pub.iaea.org/MTCD/Meetings/PDFplus/2010/38924/TM-38924/Presentations/da%20Silva.pdf (accessed on 23 October 2021).
- Marques, L.; Vale, A.; Vaz, P. State-of-the-Art Mobile Radiation Detection Systems for Different Scenarios. Sensors 2021, 21, 1051. [Google Scholar] [CrossRef] [PubMed]
- Patterson, J.I.H. Recent Advances in Handheld XRF for Site Remediation. In Proceedings of the Technical Meeting on In-Situ Methods for Characterization of Contaminated Sites, IAEA, Vienna, Austria, 5–9 July 2010. [Google Scholar]
- International Atomic Energy Agency. Radiometric Reporting Methods and Calibration in Uranium Exploration; Technical Reports Series 174; International Atomic Energy Agency: Vienna, Austria, 1976. [Google Scholar]
- International Atomic Energy Agency. Gamma-Ray Surveys in Uranium Exploration; Technical Reports Series No. 186; International Atomic Energy Agency: Vienna, Austria, 1979. [Google Scholar]
- International Atomic Energy Agency. Guidelines for Radioelement Mapping Using Gamma Ray Spectrometry Data; TECDOC 1363; International Atomic Energy Agency: Vienna, Austria, 2003. [Google Scholar]
- Pätzold, S.; Leenen, M.; Heggemann, T.W. Proximal Mobile Gamma Spectrometry as Tool for Precision Farming and Field Experimentation. Soil Syst. 2020, 4, 31. [Google Scholar] [CrossRef]
- Application of Uranium Exploration Data and Techniques in Environmental Studies. Proceedings of the Technical Committee Meeting, Vienna, Austria, 9–12 November 1993; TECDOC 827; International Atomic Energy Agency: Vienna, Austria, 1993.
- Coetzee, H.; Larkin, J. Airborne Radiometric Surveying for the Management of Health, Safety and the Environment in the Uranium Mining Industry: Potential Applications and Limitations. In The New Uranium Mining Boom—Challenge and Lessons Learned; Merkel, B., Schipek, M., Eds.; Springer: Heidelberg, Germany; Dordrecht, The Netherlands; London, UK; New York, NY, USA, 2011. [Google Scholar]
- Connor, D.; Martin, P.G.; Scott, T.B. Airborne radiation mapping: Overview and application of current and future aerial systems. Int. J. Remote Sens. 2016, 37, 5953–5987. [Google Scholar] [CrossRef]
- Furutani, T.; Minami, M. Drones for Disaster Risk Reduction and Crisis Response. In Disaster Risk Reduction—Methods, Approaches and Practices; Sakurai, M., Shaw, R., Eds.; Springer: Berlin, Germany, 2021; Chapter 4; ISBN 978-981-16-0359-4, ISBN 978-981-16-0360-0. [Google Scholar] [CrossRef]
- Simek, P. Evolution of Contamination in the Plouènice River Basin (Bohemia) due to uranium mining in the period 1992–2009. In Proceedings of the Technical Meeting on In-Situ Methods for Characterization of Contaminated Sites, IAEA, Vienna, Austria, 5–9 July 2010; Available online: http://www-pub.iaea.org/MTCD/Meetings/PDFplus/2010/38924/TM-38924/Presentations/Simek.pdf (accessed on 23 October 2021).
- Buchanan, E.; Cresswell, A.J.; Seitz, B.; Sanderson, D.C.W. Operator Related Attenuation Effects in Radiometric Surveys. Radiat. Meas. 2016, 86, 24–31. [Google Scholar] [CrossRef] [Green Version]
- Sanada, Y.; Torii, T. Aerial Radiation Monitoring around the Fukushima Dai-Ichi Nuclear Power Plant Using an Unmanned Helicopter. J. Environ. Radioact. 2015, 139, 294–299. [Google Scholar] [CrossRef] [PubMed]
- Pöllänen, R.; Toivonen, H.; Peräjärvi, K.; Karhunen, T.; Ilander, T.; Lehtinen, J.; Rintala, K.; Katajainen, T.; Niemelä, J.; Juusela, M. Radiation Surveillance Using an Unmanned Aerial Vehicle. Appl. Radiat. Isot. 2009, 67, 340–344. [Google Scholar] [CrossRef]
- Aleotti, J.; Micconi, G.; Caselli, S.; Benassi, G.; Zambelli, N.; Bettelli, M.; Calestani, D.; Zappettini, A. Haptic Teleoperation of UAV Equipped with Gamma-Ray Spectrometer for Detection and Identification of Radio-Active Materials in Industrial Plants. In Factories of the Future—The Italian Flagship Initiative; Tolio, T., Copani, G., Terkaj, W., Eds.; Springer Open: Berlin, Germany, 2019; Chapter 9; ISBN 978-3-319-94357-2, ISBN 978-3-319-94358-9. [Google Scholar] [CrossRef] [Green Version]
- Boudergui, K.; Carrel, F.; Domenech, T.; Guenard, N.; Poli, J.-P.; Ravet, A.; Schoepff, V.; Woo, R. Development of a Drone Equipped with Optimized Sensors for Nuclear and Radiological Risk Characterization. In Proceedings of the 2nd International Conference on Advancements in Nuclear Instrumentation, Measurement Methods and Their Applications, Ghent, Belgium, 6–9 June 2011; pp. 1–9. [Google Scholar] [CrossRef]
- Cao, Y.; Tang, X.-B.; Wang, P.; Meng, J.; Huang, X.; Wen, L.-S.; Chen, D. Spectrum Correction Algorithm for Detectors in Airborne Radioactivity Monitoring Equipment NH-UAV Based on a Ratio Processing Method. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2015, 797, 290–296. [Google Scholar] [CrossRef]
- Martin, P.G.; Moore, J.; Fardoulis, J.S.; Payton, O.D.; Scott, T.B. Radiological assessment on interest areas on the Sellafield nuclear site via unmanned aerial vehicle. Remote Sens. 2016, 8, 913. [Google Scholar] [CrossRef] [Green Version]
- Parshin, A.; Grebenkin, N.; Morozov, V.; Shikalenko, F. Research Note: First results of a low-altitude unmanned aircraft gamma survey by comparison with the terrestrial and aerial gamma survey data. Geophys. Prospect. 2018, 66, 1433–1438. [Google Scholar] [CrossRef]
- Limburg, H.; van der Veeke, S.; Koomans, R. Towards drone-borne gammaray mapping of soils. First Break. 2019, 37, 55–61. [Google Scholar] [CrossRef]
- Martin, P.G.; Payton, O.D.; Fardoulis, J.S.; Richards, D.A.; Scott, T.B. The use of unmanned aerial systems for the mapping of legacy uranium mines. J. Environ. Radioact. 2015, 143, 135–140. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAV monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef] [Green Version]
- Han, J.; Xu, Y.; Di, L.; Chen, Y. Low-cost Multi-UAV Technologies for Contour Mapping of Nuclear Radiation Field. J. Intell. Robot. Syst. 2013, 70, 401–410. [Google Scholar] [CrossRef]
- International Atomic Energy Agency. Assessment and Proposals for Uranium Production Legacy Sites in Central Asia: An International Approach; International Atomic Energy Agency: Vienna, Austria, 2010. [Google Scholar]
- Torgoev, I.A.; Aleshin, Y.G.; Ashirov, G.E. Environmental Effects of Possible Landslide Catastrophes in the Areas of Radioactive Waste Warehousing in Kyrgyzstan (Central Asia). In The Areas of Radioactive Waste Warehousing in Kyrgyzstan (Central Asia), Proceedings of The First World Landslide Forum; United Nations University: Tokyo, Japan, 2008; pp. 599–602. [Google Scholar]
- Li, F.; Torgoev, I.; Zaredinov, D.; Li, M.; Talipov, B.; Belousova, A.; Kunze, C.P. Schneider: Influence of Earthquakes on Landslide Susceptibility in a Seismic Prone Catchment in Central Asia. Appl. Sci. 2021, 11, 3768. [Google Scholar] [CrossRef]
- Sevcik, M. Uranium Tailings in Kyrgyzstan: Catalyst for Cooperation and Confidence Building? Nonproliferation Rev. 2003, 10, 147–154. [Google Scholar] [CrossRef]
- Daneykin, Y.; Andreevsky, E.; Rogozhin, M.; Sernetsky, O. Threats and Challenges to the Regional Security in Central Asian Region (the Example of the Republic of Kyrgyzstan). Procedia-Soc. Behav. Sci. 2015, 166, 86–91. [Google Scholar] [CrossRef] [Green Version]
- Kunze, C. Insurability of Unknown Post-Closure Liabilities. J. Can. Inst. Min. 2013, 4, 254–264. [Google Scholar]
- International Atomic Energy Agency. Lessons Learned from Environmental Remediation Programmes; IAEA Nuclear Energy Series No. NW-T-3.6; International Atomic Energy Agency: Vienna, Austria, 2014. [Google Scholar]
- Li, F.; Torgoev, I.; Zaredinov, D.; Li, M.; Talipov, B.; Belousova, A.; Kunze, P.C. Schneider: Landslide-Induced Mass Transport of Radionuclides along Transboundary Mailuu-Suu River Networks in Central Asia. Remote Sens. 2021, 13, 698. [Google Scholar] [CrossRef]
- UN General Assembly. Resolution A/RES/68/218 “The Role of the International Community in the Averting the Radiation Threat in Central Asia”. 68th Session. 2013. Available online: https://www.insdip.com/en/68o-periodo-de-sesiones-2013-2014-agnu/ (accessed on 14 March 2022).
- International Atomic Energy Agency. General Conference Resolutions; 2009-14: GC(53)/RES/10, Para 65; GC(54)/RES/7, Para 54; GC(55)/RES/9, Para 66; GC(56)/RES/9, Para 64; GC(57)/RES/9, Para 86; GC(58)/RES/10, Para 90; IAEA: Vienna, Austria, 2009. [Google Scholar]
- Kunze, C.; Hartsch, J.; Metschies, T.; Schmidt, P.; Uhlig, L.; Wagner, F.; Walter, U. Technical Assistance and Know How Transfer to Central Asian Countries in the Environmental Remediation of ULS: Current State, Outlook and Lessons Learned. In Proceedings of the Shaping the Future: Long-Term Experiences and Innovations in Mine Remediation–Proceedings des Internationalen Mining Symposium WISSYM 2019, Chemnitz, Germany, 9–11 October 2019. [Google Scholar]
- European Bank for Reconstruction and Development. Uranium Legacy in Central Asia: Significant Progress, but Funding Gap Remains; European Bank for Reconstruction and Development: London, UK, 2021; Available online: https://www.ebrd.com/news/2021/uranium-legacy-in-central-asia-significant-progress-but-funding-gap-remains.html (accessed on 23 October 2021).
- International Atomic Energy Agency. Strategic Master Plan for Environmental Remediation of Uranium Legacy Sites in Central Asia. In Proceedings of the 61st IAEA General Conference, Vienna, Austria, 18 September 2017. [Google Scholar]
- International Atomic Energy Agency. Strategic Master Plan for Environmental Remediation of Uranium Legacy Sites in Central Asia. In Proceedings of the 65th IAEA General Conference, Vienna, Austria, 21 September 2021. 2nd ed., revised and updated. [Google Scholar]
- International Atomic Energy Agency. IAEA Harnesses Drone Technology to Support Safer Environmental Remediation in Central Asia; International Atomic Energy Agency: Vienna, Austria, 2021; Available online: https://www.iaea.org/newscenter/news/iaea-harnesses-drone-technology-to-support-safer-environmental-remediation-in-central-asia (accessed on 23 October 2021).
- Arndt, R.; Kunze, C.; Mossig, J.; Schulz, H. Drone-based gamma spectrometry at NORM and uranium legacy sites. In Proceedings of the 2nd Workshop of the European NORM Association (ENA), Vienna, Austria, 20–22 October 2020. [Google Scholar]
- Preugschat, B.; Seht, M.I. Gamma spectra from uranium mining residues simulated for airborne geometries and detectors. In Proceedings of the General Assembly 2020 of the European Geosciences Union (EGU), Online, 4–8 May 2020. [Google Scholar] [CrossRef]
- Monken-Fernandes, H. The IAEA Project to Develop a Mobile Unit for Site Characterization. In Proceedings of the Technical Meeting on In-Situ Methods for Characterization of Contaminated Sites. IAEA, Vienna, Austria, 5–9 July 2010; Available online: http://www-pub.iaea.org/MTCD/Meetings/PDFplus/2010/38924/TM-38924/Presentations/Monken%20Fernandes.pdf (accessed on 23 October 2021).
- Gilmore, G. Practical Gamma-Ray Spectroscopy, 2nd ed.; reprinted with corrections; Wiley: Chichester, UK, 2011; 387p. [Google Scholar]
- MacFarlane, J.W.; Payton, O.D.; Keatley, A.C.; Scott, G.P.T.; Pullin, H.; Crane, R.A.; Smilion, M.; Popescu, I.; Curlea, V.; Scott, T.B. Lightweight Aerial Vehicles for Monitoring, Assessment and Mapping of Radiation Anomalies. J. Environ. Radioact. 2014, 136, 127–130. [Google Scholar] [CrossRef]
- Ahl, A.; Bieber, G. Correction of the attenuation effect of vegetation on airborne gamma-ray spectrometry data using laser altimeter data. Near Surf. Geophys. 2010, 8, 271–278. [Google Scholar] [CrossRef]
- Burnette, H. AFRL Incorporates Solar Cell Technology into Small Unmanned Aircraft Systems, Wright Patterson Air Force Base, 19 October 2012. Available online: https://www.wpafb.af.mil/News/Article-Display/Article/399512/afrl-incorporates-solar-cell-technology-into-small-unmanned-aircraft-systems/ (accessed on 14 March 2022).
- Sanderson, D.C.W.; Allyson, J.D.; Tyler, A.N.; Scott, E.M. Environmental Applications of Airborne Gamma Spectrometry. In Application of Uranium Exploration Data and Techniques in Environmental Studies. Proceedings of the Technical Committee Meeting, Vienna, Austria, 9–12 November 1993; International Atomic Energy Agency: Vienna, Austria, 1993. [Google Scholar]
- Brewer, E.T. Autonomous Localization of 1/R2 Sources Using an Aerial Platform. Master’s Thesis, Virginia Tech, Blacksburg, VA, USA, 2009. Available online: https://vtechworks.lib.vt.edu/handle/10919/36378 (accessed on 13 November 2021).
- Baca, T.; Stibinger, P.; Doubravova, D.; Turecek, D.; Solc, J.; Rusnak, J.; Saska, M.; Jakubek, J. Gamma Radiation Source Localization for Micro Aerial Vehicles with a Miniature Single-Detector Compton Event Camera. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 338–346. [Google Scholar]
- Jiang, J.; Shimazoe, K.; Nakamura, Y.; Takahashi, H.; Shikaze, Y.; Nishizawa, Y.; Yoshida, M.; Sanada, Y.; Torii, T.; Yoshino, M.; et al. A Prototype of Aerial Radiation Monitoring System Using an Unmanned Helicopter Mounting A GAGG Scintillator Compton Camera. J. Nucl. Sci. Technol. 2016, 53, 1067–1075. [Google Scholar] [CrossRef]
- Długosz-Lisiecka, M.; Bem, H. 2021, Fast procedure for self-absorption correction for low gamma energy radionuclide 210Pb determination in solid environmental samples. J. Radioanal. Nucl. Chem. 2013, 298, 495–499. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schwarz, G.F.; Rybach, L.; Barlocher, C.K.; Klingele, E.E. Development and Calibration of an Airborne Radiometric Measuring System. In Application of Uranium Exploration Data and Techniques in Environmental Studies. Proceedings of the Technical Committee Meeting, Vienna, Austria, 9–12 November 1993; International Atomic Energy Agency: Vienna, Austria, 1993. [Google Scholar]
- International Atomic Energy Agency. Integrated Approach to Planning the Remediation of Sites Undergoing Decommissioning; IAEA nuclear energy series No. NW-T-3.3; International Atomic Energy Agency: Vienna, Austria, 2009. [Google Scholar]
- Luftfahrtbundesamt [Federal Civil Aviation Authority of Germany]. 2021, Onlinekurs Fernpiloten [online course for UAV operators]. Available online: https://lba-openuav.de/onlinekurs/ (accessed on 30 October 2021).
- Center for Emergency Situations and Disaster Risk Reduction. Development of UAV in the field of emergency situations. 2021. Available online: https://cesdrr.org/uav (accessed on 13 November 2021).
- Environment and Security Initiative UN Development Program (ENVSEC). Project for Stakeholder Involvement in Solving the Problems of Uranium Tailings in Central Asia, 2016, Report on Risk Perception And Capacity Needs, Bishkek. 2016; Unpublished work. [Google Scholar]
- Abdirasulova, G. Access of Residents of the Town of Mailuu Suu to Ecological Information. Results of a Survey. [Дoступ к экoлoгическoй инфoрмации жителей гoрoда Майлуу-Суу. Результаты мoнитoринга]; European Union: Bishkek, Kyrgyzstan, 2017. [Google Scholar]
- Hagen, M.; Jakubick, A.T. The uranium mining legacy of Eastern Germany: From remediation to regional development. In International Atomic Energy Agency (IAEA), Low Environmental Impact Uranium Mining and Remediation: 15 Years of Multinational Experience through Uranium Mine Remediation Exchange Group (UMREG); TECDOC 1431; IAEA: Vienna, Austria, 2011. [Google Scholar]
- Kahnwald, S. Clean up of a radioactively contaminated legacy site in Oranienburg, Germany. In Proceedings of the 2nd Workshop of the European NORM Association (ENA), Vienna, Austria, 20–22 October 2020. [Google Scholar]
- Leopold, K. Chemical Types of Bounding of Natural Radionuclides in TENORM (Technologically Enhanced Naturally Occurring Radioactive Materials). Ph.D. Thesis, University Duisburg-Essen, Duisburg, Germany, 2007. [Google Scholar]
- McGregor, D.S. Materials for Gamma-Ray Spectrometers: Inorganic Scintillators. Annu. Rev. Mater. Res. 2018, 48, 245–277. [Google Scholar] [CrossRef]
- Hendriks, P.H.G.M.; Limburg, H.; Meijer, R.J. Full-spectrum analysis of natural γ-ray spectra. J. Environ. Radioact. 2001, 53, 365–380. [Google Scholar] [CrossRef]
- Limburg, H. Calibration Procedure. The Medusa Institute. 2021. Available online: https://the.medusa.institute/display/PD/Calibration+procedure (accessed on 14 March 2022).
- Grasty, R.L.; Holman, P.B.; Blanchard, Y.B. Transportable calibration pads for ground and airborne gamma-ray spectrometers, Geological Survey of Canada. Geol. Surv. Can. 1999, 90, 23. [Google Scholar]
- van der Graaf, E.R.; Limburg, J.; Koomans, R.L. Tijs, Transportable calibration pads for ground and airborne detectors for laboratory and in situ gamma ray measurements. J. Environ. Radioact. 2011, 102, 270–282. [Google Scholar] [CrossRef] [PubMed]
- Bronstein, I.N.; Sememdiaev, K.A.; Musiol, G.; Mühlig, H. Handbook of Mathematics, 6th ed.; Springer: Heidelberg, Germany, 2015. [Google Scholar]
- van der Veeke, S.; Limburg, J.; Koomans, R.L.; Söderström, M.; de Waal, S.N.; van der Graaf, E.R. Footprint and height corrections for UAV-borne gamma-ray spectrometry studies. J. Environ. Radioact. 2021, 231, 106545. [Google Scholar] [CrossRef]
- Schwarz, G.F.; Rybach, L.; Klingele, E.E. Data Processing and Mapping in Airborne Radioactivity Surveys. In Application of Uranium Exploration Data and Techniques in Environmental Studies, Proceedings of the Technical Committee Meeting, Vienna, Austria, 9–12 November 1993; International Atomic Energy Agency: Vienna, Austria, 1993. [Google Scholar]
- Amestoy, J.; Meslin, P.-Y.; Richon, P.; Delpuech, A.; Derrien, S.; Raynal, H.; Pique, E.; Baratoux, D.; Chotard, P.; van Beek, P.; et al. Effects of environmental factors on the monitoring of environmental radioactivity by airborne gamma-ray spectrometry. J. Environ. Radioact. 2021, 237, 106695. [Google Scholar] [CrossRef]
- Ohno, M.; Okamoto, K.; Umegaki, K.; Fujiyoshi, R. Results of simultaneous monitoring of soil 222Rn and moisture at different depths in a forest site in Fukushima Prefecture, Japan. J. Radioanal. Nucl. Chem. 2016, 310, 1013–1020. [Google Scholar] [CrossRef]
- Schubert, M.; Schulz, H. Diurnal Radon Variations in the Upper Soil Layers and at the Soil-Air Interface Related to Meteorological Parameters. Health Phys 2002, 83, 1. [Google Scholar] [CrossRef]
- Siino, M.; Scudero, S.; Cannelli, V.; Piersanti, A.; D’Alessandro, A. Multiple seasonality in soil radon time series. Sci. Rep. 2019, 9, 8610. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fyodorov, G.V. Uranium production and the environment in Kazakhstan. In Proceedings of the International Symposium on the Uranium Production Cycle and the Environment, Vienna, Austria, 2–6 October 2000; International Atomic Energy Agency (IAEA): Vienna, Austria, 2002. [Google Scholar]
- Uralbekov, B.M.; Smodis, B.; Burkitbayev, M. Uranium in natural waters sampled within former uranium mining sites in Kazakhstan and Kyrgyzstan. J. Radioanal. Nucl. Chem. 2011, 289, 805–810. [Google Scholar] [CrossRef]
- Pandey, U. Assessment of Gamma and Radon in the Kurday Mining Site, Kazakhstan. Master’s Thesis, Department of Plant and Environmental Sciences, Norwegian University of Life Sciences, As, Norway, 2021. [Google Scholar]
- Kunze, C.; Walter, U.; Wagner, F.; Schmidt, P.; Barnekow, U.; Gruber, A. Environmental impact and remediation of uranium tailings and waste rock dumps at Mailuu Suu (Kyrgyzstan). In Low Environmental Impact Uranium Mining and Remediation: 15 Years of Multinational Experience through Uranium Mine Remediation Exchange Group (UMREG); TECDOC 1431; International Atomic Energy Agency (IAEA): Vienna, Austria, 2007. [Google Scholar]
- Vandenhove, H.; Clerc, J.J.; Quarch, H.; Aitkulov, A.; Savosin, M.; Torgoev, I.; Mirzachev, M. 2011, Phased Remediation Approach for Prevention of Risks Linked with Uranium Tailings in Mailuu-Suu, Kyrgyzstan. In Low Environmental Impact Uranium Mining and Remediation: 15 Years of Multinational Experience through Uranium Mine Remediation Exchange Group (UMREG); TECDOC 1431; International Atomic Energy Agency (IAEA): Vienna, Austria, 2011. [Google Scholar]
- Havenith, H.B.; Torgoev, I.; Meleshko, A.; Alioshin, Y.; Torgoev, A.; Danneels, G. Landslides in the Mailuu-Suu Valley, Kyrgyzstan—Hazards and Impacts. Landslides 2006, 3, 137–147. [Google Scholar] [CrossRef]
- WISUTEC. Report on Task 3.2 “Site Characterisation of the Mailuu Suu Uranium Legacy Site”, INSC EuropeAid/138036/DH/SER/KG “Conducting an Integrated Environmental Impact Assessment and Feasibility Study for the Safe Management and Remediation of the Uranium Legacy Complex of Mailuu-Suu—Contract MC4.01/14”. 2019; Unpublished work. [Google Scholar]
- Weather Data of Andijan Airport. Available online: https://www.wunderground.com/calendar/uz/%D0%B0%D1%81%D0%B0%D0%BA%D0%B0/UTFA/date/2021-10 (accessed on 14 March 2022).
- Federal Office for Radiation Protection of Germany; Department of Radiation Protection and Environment. Calculation Guide for the Determination of Radiation Exposure Due to Environmental Radioactivity in Mining; BfS-SW-09/11; Salzgitter: Salzgitter, Germany, 2011. [Google Scholar]
- Schmidt, P.; Barthel, U. Appendix 1 (Radiological Assessment) to the Environmental Impact Assessment for the Remediation of WD1 and WD2, Mailuu Suu; Component A.; Disaster Hazard Mitigation Project (DHMP): Chemnitz, Germany, 2006. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CeBr3 (Medusa) | NaI (innoRIID) | CeBr3 (innoRIID) | |
|---|---|---|---|
| Crystal dimensions (inches) | 3 × 6 | 3 × 3 | 2 × 2 |
| Crystal volume (cm3) | 700 | 350 | 100 |
| FWHM at 662 keV (%) | <3.9 | <7.2 | <4.2 |
| Number of spectral channels | 2048 * | 1024 | 1024 |
| Parameter | WD3, Mailuu Suu |
|---|---|
| Footprint of waste rock dump (ha) | 1.89 [78,80] |
| Waste volume (m3) | 70,000 [78], 250,000 [80] |
| Average specific activity of U-238 (Bq/g) | 0.9 [unpublished archive data on uranium content of waste rock from mine no. 6], supported by sample KS_S0401 in [80] |
| Average specific activity of Ra-228 (Bq/g) | <0.1 [80] |
| Average specific activity of K-40 (Bq/g) | 0.6 [80] |
| Percent of the total surface with gamma dose rates H*(10) of <150 nSv/h in 1 m above surface | 12 [80] |
| Percent of the total surface with gamma dose rates H*(10) of 150…300 nSv/h in 1 m above surface | 30 [80] |
| Percent of the total surface with gamma dose rates H*(10) of 300…500 nSv/h in 1 m above surface | 30 [80] |
| Percent of the total surface with gamma dose rates H*(10) of 500…1000 nSv/h in 1 m above surface | 23 [80] |
| Percent of the total surface with gamma dose rates H*(10) of >1000 nSv/h in 1 m above surface | 5 [80] |
| Local background of the gamma dose rate H*(10) in the Kulmensay valley in 1 m above surface (nSv/h) | 139 [80] |
| Parameter | Value |
|---|---|
| Altitude | 10 m AGL |
| Ground speed | 3 m/s Slower or hovering at hot spots on an ad-hoc basis |
| Duration of a single flight mission | 20 min, typically including 5 min for approach to the ULS from launch pad, and return |
| Flight pattern in automatic flight mode | Parallel lines covering the entire lateral extension of the ULS |
| Spacing of flight lines | 10 m |
| Surface coverage rate | 10.8 ha per hour, or 2.7 ha per mission |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kunze, C.; Preugschat, B.; Arndt, R.; Kandzia, F.; Wiens, B.; Altfelder, S. Development of a UAV-Based Gamma Spectrometry System for Natural Radionuclides and Field Tests at Central Asian Uranium Legacy Sites. Remote Sens. 2022, 14, 2147. https://doi.org/10.3390/rs14092147
Kunze C, Preugschat B, Arndt R, Kandzia F, Wiens B, Altfelder S. Development of a UAV-Based Gamma Spectrometry System for Natural Radionuclides and Field Tests at Central Asian Uranium Legacy Sites. Remote Sensing. 2022; 14(9):2147. https://doi.org/10.3390/rs14092147
Chicago/Turabian StyleKunze, Christian, Benedikt Preugschat, Robert Arndt, Felix Kandzia, Benjamin Wiens, and Sven Altfelder. 2022. "Development of a UAV-Based Gamma Spectrometry System for Natural Radionuclides and Field Tests at Central Asian Uranium Legacy Sites" Remote Sensing 14, no. 9: 2147. https://doi.org/10.3390/rs14092147
APA StyleKunze, C., Preugschat, B., Arndt, R., Kandzia, F., Wiens, B., & Altfelder, S. (2022). Development of a UAV-Based Gamma Spectrometry System for Natural Radionuclides and Field Tests at Central Asian Uranium Legacy Sites. Remote Sensing, 14(9), 2147. https://doi.org/10.3390/rs14092147