
Recomputation and Updating of MOLA Geolocation


Abstract
:1. Introduction
2. Data
3. Methods
4. Results
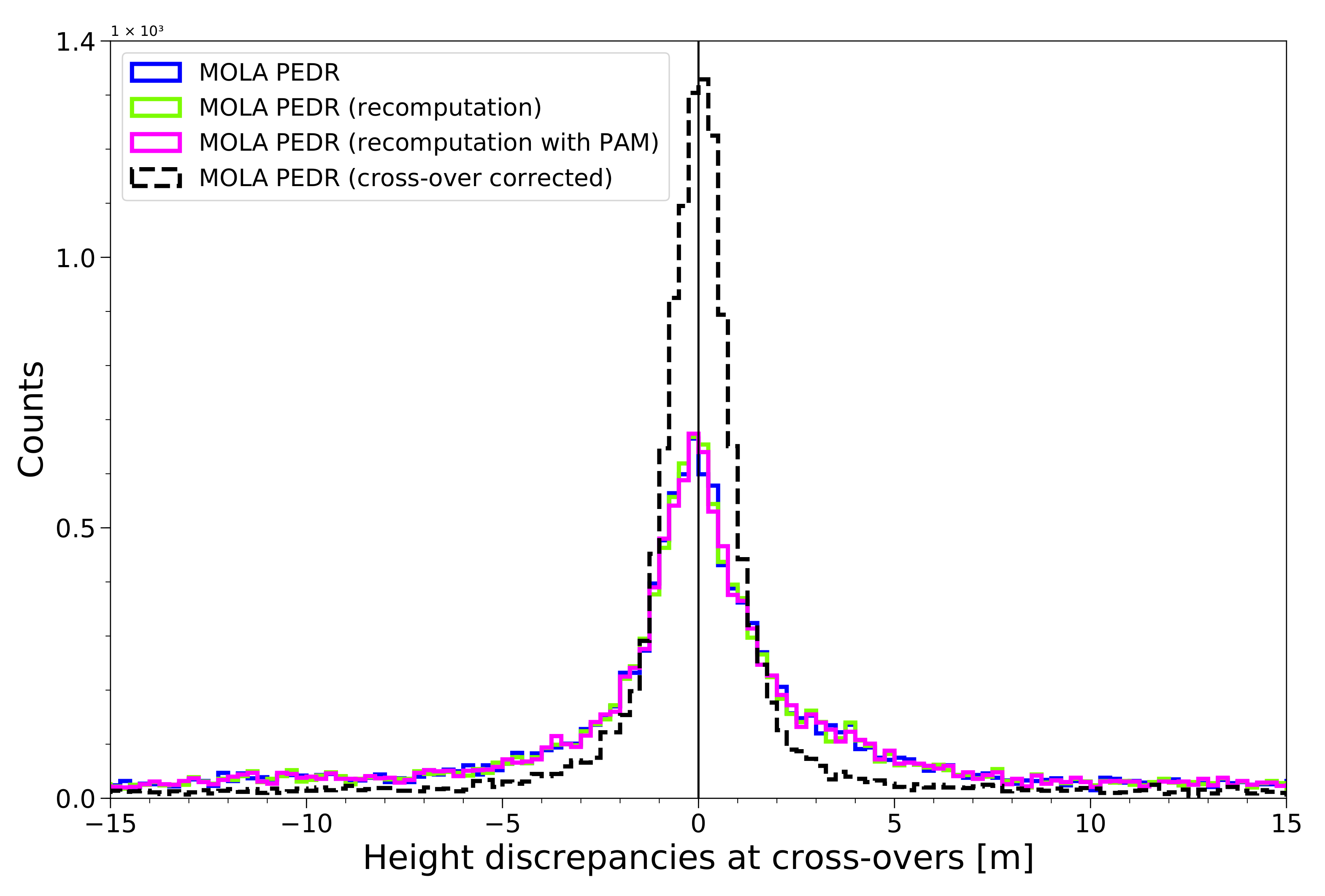
4.1. Recomputation of the PEDR Dataset
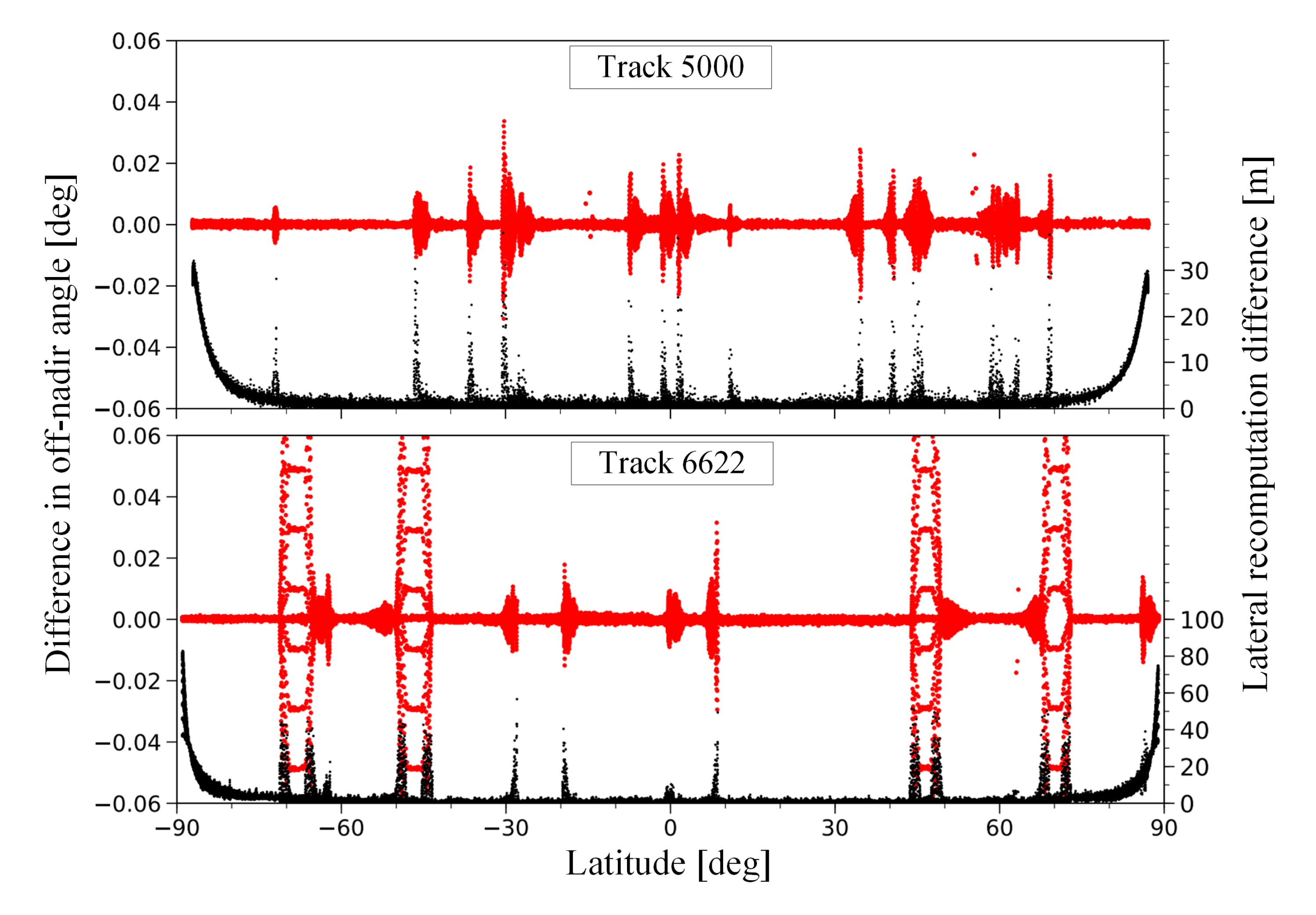
4.2. Impact of Pointing Aberration on Off-Nadir Profiles
4.3. Reprocessing of the PEDR Data
5. Discussion
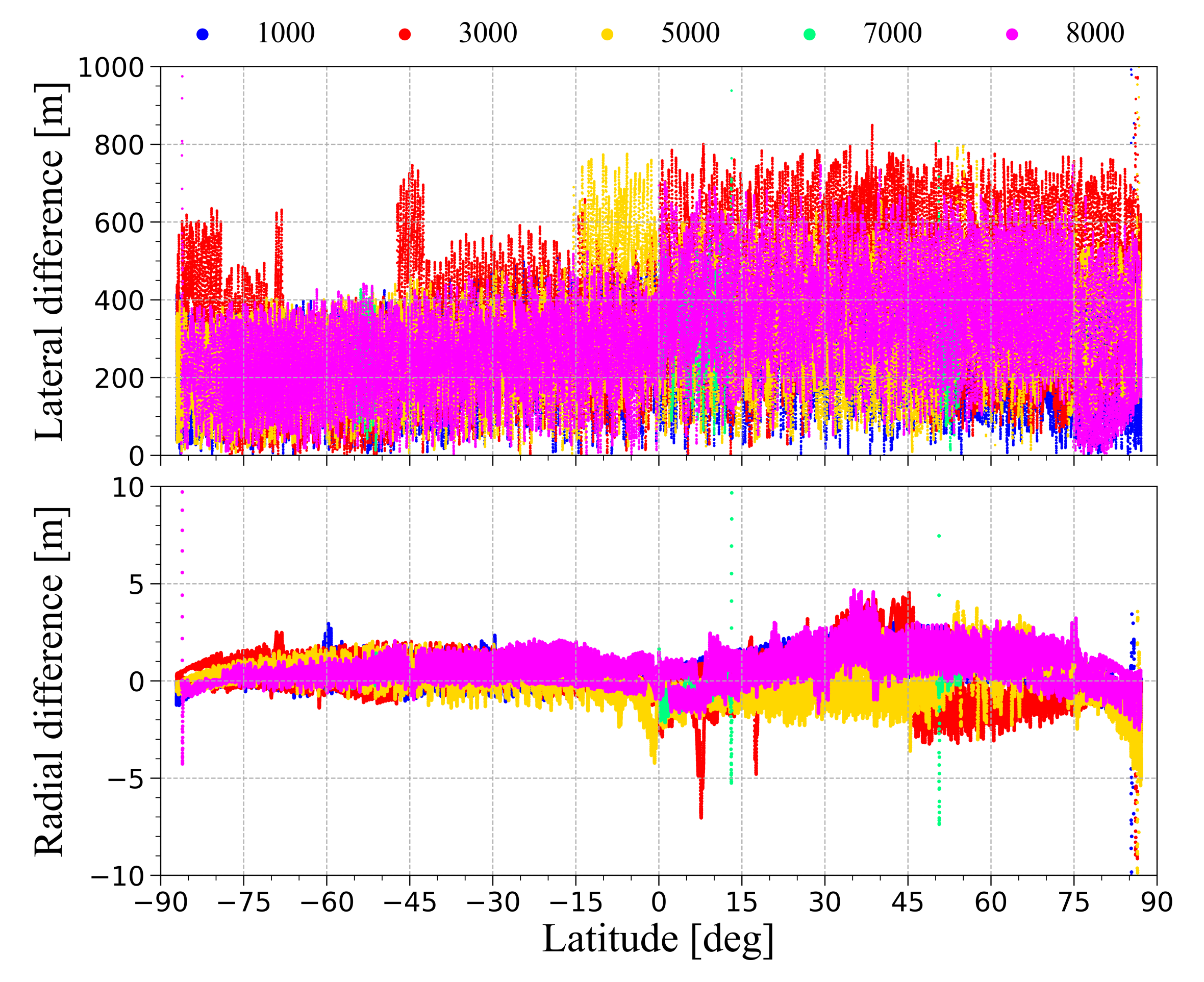
5.1. Dramatic Increases in Residuals Near the Poles
5.2. Spiky Deviations
5.3. Comparison of Different MGS Attitude Sources
5.4. Impact of the Updated MGS Orbit Model and Mars Rotational Model
5.5. Prospects for Further Improvement of MOLA Geolocation
5.5.1. Incorporation of a More Recent Mars Rotational Model
5.5.2. Post-Correction of Reprocessed MOLA Profiles
5.5.3. Waveform Simulation to Account for Pulse Saturation and Distortion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Perry, M.E.; Neumann, G.A.; Phillips, R.J.; Barnouin, O.S.; Ernst, C.M.; Kahan, D.S.; Solomon, S.C.; Zuber, M.T.; Smith, D.E.; Hauck, S.A.; et al. The low-degree shape of Mercury. Geophys. Res. Lett. 2015, 42, 6951–6958. [Google Scholar] [CrossRef] [Green Version]
- Smith, D.E.; Zuber, M.T.; Neumann, G.A.; Mazarico, E.; Lemoine, F.G.; Head, J.W., III; Lucey, P.G.; Aharonson, O.; Robinson, M.S.; Sun, X.; et al. Summary of the results from the Lunar Orbiter Laser Altimeter after seven years in lunar orbit. Icarus 2017, 283, 70–91. [Google Scholar] [CrossRef] [Green Version]
- Mazarico, E.; Barker, M.K.; Neumann, G.A.; Zuber, M.T.; Smith, D.E. Detection of the lunar body tide by the Lunar Orbiter Laser Altimeter. Geophys. Res. Lett. 2014, 41, 2282–2288. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Steinbrügge, G.; Stark, A.; Hussmann, H.; Sohl, F.; Oberst, J. Measuring tidal deformations by laser altimetry. A performance model for the Ganymede Laser Altimeter. Planet. Space Sci. 2015, 117, 184–191. [Google Scholar] [CrossRef]
- Steinbrügge, G.; Stark, A.; Hussmann, H.; Wickhusen, K.; Oberst, J. The performance of the BepiColombo Laser Altimeter (BELA) prior launch and prospects for Mercury orbit operations. Planet. Space Sci. 2018, 159, 84–92. [Google Scholar] [CrossRef]
- Smith, D.E.; Zuber, M.T.; Neumann, G.A. Seasonal variations of snow depth on Mars. Science 2001, 294, 2141–2146. [Google Scholar] [CrossRef] [Green Version]
- Aharonson, O.; Zuber, M.T.; Smith, D.E.; Neumann, G.A.; Feldman, W.C.; Prettyman, T.H. Depth, distribution, and density of CO2 deposition on Mars. J. Geophys. Res. Planets 2004, 109, E05004. [Google Scholar] [CrossRef] [Green Version]
- Rowlands, D.D.; Pavlis, D.E.; Lemoine, F.G.; Neumann, G.A.; Luthcke, S.B. The use of laser altimetry in the orbit and attitude determination of Mars Global Surveyor. Geophys. Res. Lett. 1999, 26, 1191–1194. [Google Scholar] [CrossRef] [Green Version]
- Mazarico, E.; Neumann, G.; Rowlands, D.; Smith, D. Geodetic constraints from multi-beam laser altimeter crossovers. J. Geod. 2010, 84, 343–354. [Google Scholar] [CrossRef]
- Stark, A.; Oberst, J.; Preusker, F.; Peale, S.J.; Margot, J.L.; Phillips, R.J.; Neumann, G.A.; Smith, D.E.; Zuber, M.T.; Solomon, S.C. First MESSENGER orbital observations of Mercury’s librations. Geophys. Res. Lett. 2015, 42, 7881–7889. [Google Scholar] [CrossRef] [Green Version]
- Barker, M.K.; Mazarico, E.; Neumann, G.A.; Zuber, M.T.; Haruyama, J.; Smith, D.E. A new lunar digital elevation model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera. Icarus 2016, 273, 346–355. [Google Scholar] [CrossRef] [Green Version]
- Xiao, H.; Stark, A.; Steinbrügge, G.; Thor, R.; Schmidt, F.; Oberst, J. Prospects for mapping temporal height variations of the seasonal CO2 snow/ice caps at the Martian poles by co-registration of MOLA Profiles. Planet. Space Sci. 2022, 214, 105446. [Google Scholar] [CrossRef]
- Neumann, G.A.; Abshire, J.B.; Aharonson, O.; Garvin, J.B.; Sun, X.; Zuber, M.T. Mars Orbiter Laser Altimeter pulse width measurements and footprint-scale roughness. Geophys. Res. Lett. 2003, 30, 1561. [Google Scholar] [CrossRef]
- Neumann, G.A.; Smith, D.E.; Zuber, M.T. Two Mars years of clouds detected by the Mars Orbiter Laser Altimeter. J. Geophys. Res. Planets 108, 5023. [CrossRef] [Green Version]
- Daly, M.G.; Barnouin, O.S.; Dickinson, C.; Seabrook, J.; Johnson, C.L.; Cunningham, G.; Haltigin, T.; Gaudreau, D.; Brunet, C.; Aslam, I.; et al. The OSIRIS-REx Laser Altimeter (OLA) investigation and instrument. Space Sci. Rev. 2017, 212, 899–924. [Google Scholar] [CrossRef]
- Hussmann, H. Laser Altimetry and Its Applications in Planetary Science. In Planetary Geodesy and Remote Sensing; CRC Press: Boca Raton, FL, USA, 2014; Chapter 3; pp. 51–75. [Google Scholar]
- Hussmann, H.; Lingenauber, K.; Kallenbach, R.; Enya, K.; Thomas, N.; Lara, L.M.; Althaus, C.; Araki, H.; Behnke, T.; Castro, J.M.; et al. The Ganymede laser altimeter (GALA): Key objectives, instrument design, and performance. CEAS Space J. 2019, 11, 381–390. [Google Scholar] [CrossRef]
- Thomas, N.; Hussmann, H.; Spohn, T.; Lara, L.M.; Christensen, U.; Affolter, M.; Bandy, T.; Beck, T.; Chakraborty, S.; Geissbuehler, U.; et al. The BepiColombo Laser Altimeter. Space Sci. Rev. 2021, 217, 25. [Google Scholar] [CrossRef]
- Oberst, J.; Wickhusen, K.; Gwinner, K.; Hauber, E.; Stark, A.; Elgner, S.; Grott, M.; Fanara, L.; Hussmann, H.; Steinbrügge, G.; et al. Planetary polar explorer—The case for a next-generation remote sensing mission to low Mars orbit. Exp. Astron. 2022, 1–17. [Google Scholar] [CrossRef]
- Zhou, H.; Chen, Y.; Hyyppä, J.; Li, S. An overview of the laser ranging method of space laser altimeter. Infrared Phys. Technol. 2017, 86, 147–158. [Google Scholar] [CrossRef]
- Xiao, H.; Stark, A.; Steinbrügge, G.; Hussmann, H.; Oberst, J. Processing of laser altimeter Time-of-Flight measurements to geodetic coordinates. J. Geod. 2021, 95, 1–23. [Google Scholar] [CrossRef]
- Luthcke, S.B.; Rebold, T.; Thomas, T.; Pennington, T. GEDI Waveform Geolocation for L1 and L2 Products (version 1.0). In Algorithm Theoretical Basis Documents (ATBD); Goddard Space Flight Center: Greenbelt, MD, USA, 2019; pp. 1–62. Available online: https://lpdaac.usgs.gov/documents/579/GEDI__WFGEO_ATBD_v1.0.pdf (accessed on 30 March 2022).
- Luthcke, S.; Thomas, T.; Pennington, T.; Rebold, T.; Nicholas, J.; Rowlands, D.; Gardner, A.; Bae, S. ICESat-2 pointing calibration and geolocation performance. Earth Space Sci. 2021, 8, e2020EA001494. [Google Scholar] [CrossRef]
- Neumann, G.A.; Rowlands, D.D.; Lemoine, F.G.; Smith, D.E.; Zuber, M.T. Crossover analysis of Mars Orbiter Laser Altimeter data. J. Geophys. Res. Planets 2001, 106, 23753–23768. [Google Scholar] [CrossRef] [Green Version]
- Gläser, P.; Haase, I.; Oberst, J.; Neumann, G.A. Co-registration of laser altimeter tracks with digital terrain models and applications in planetary science. Planet. Space Sci. 2013, 89, 111–117. [Google Scholar] [CrossRef] [Green Version]
- Stark, A.; Oberst, J.; Preusker, F.; Gwinner, K.; Peale, S.J.; Margot, J.L.; Phillips, R.J.; Zuber, M.T.; Solomon, S.C. Mercury’s rotational parameters from MESSENGER image and laser altimeter data: A feasibility study. Planet. Space Sci. 2015, 117, 64–72. [Google Scholar] [CrossRef] [Green Version]
- Stark, A.; Annibali, S.; Oberst, J.; Hussmann, H. Measurement of lunar rotation with Lunar Orbiter Laser Altimeter data. In Proceedings of the European Planetary Science Congress, Berlin, Germany, 16–21 September 2018. Abstract EPSC2018-931. [Google Scholar]
- Barker, M.K.; Mazarico, E.; Neumann, G.A.; Smith, D.E.; Zuber, M.T.; Head, J.W. Improved LOLA elevation maps for South Pole landing sites: Error estimates and their impact on illumination conditions. Planet. Space Sci. 2020, 105–119. [Google Scholar] [CrossRef]
- Parro, L.M.; Jimenezdiaz, A.; Mansilla, F.; Ruiz, J. Present-day heat flow model of Mars. Sci. Rep. 2017, 7, 45629. [Google Scholar] [CrossRef] [Green Version]
- Pardo-Igúzquiza, E.; Dowd, P. Fractal analysis of the Martian landscape: A study of kilometre-scale topographic roughness. Icarus 2022, 372, 114727. [Google Scholar] [CrossRef]
- Konopliv, A.S.; Yoder, C.F.; Standish, E.M.; Yuan, D.N.; Sjogren, W.L. A global solution for the Mars static and seasonal gravity, Mars orientation, Phobos and Deimos masses, and Mars ephemeris. Icarus 2006, 182, 23–50. [Google Scholar] [CrossRef]
- Archinal, B.A.; Acton, C.H.; A’Hearn, M.F.; Conrad, A.; Consolmagno, G.J.; Duxbury, T.; Hestroffer, D.; Hilton, J.L.; Kirk, R.L.; Klioner, S.A.; et al. Report of the IAU working group on cartographic coordinates and rotational elements: 2015. Celest. Mech. Dyn. Astron. 2018, 130, 22. [Google Scholar] [CrossRef]
- Smith, D.E.; Zuber, M.T.; Neumann, G.A. Mars Orbiter Laser Altimeter (MOLA) Precision Experiment Data Records (PEDR) Dataset Document. Available online: http://pds-geosciences.wustl.edu/mgs/mgs-m-mola-3-pedr-l1a-v1/mgsl_21xx/catalog/pedrds.cat (accessed on 7 September 2018).
- Acton, C.H.J. Ancillary data services of NASA’s Navigation and Ancillary Information Facility. Planet. Space Sci. 1996, 44, 65–70. [Google Scholar] [CrossRef]
- Seidelmann, P.K.; Abalakin, V.K.; Bursa, M.; Davies, M.E.; De Bergh, C.; Lieske, J.H.; Oberst, J.; Simon, J.L.; Standish, E.M.; Stooke, P.; et al. Report of the IAU/IAG working group on cartographic coordinates and rotational elements of the planets and satellites: 2000. Celest. Mech. Dyn. Astron. 2002, 82, 83–111. [Google Scholar] [CrossRef]
- Karney, C.F. Algorithms for geodesics. J. Geod. 2013, 87, 43–55. [Google Scholar] [CrossRef] [Green Version]
- Smith, D.E.; Neumann, G.A.; Arvidson, R.E.; Guinness, E.A.; Slavney, S. Mars Global Surveyor Laser Altimeter Mission Experiment Gridded Data Record (MEGDR). NASA Planetary Data System. Technical Report, MGS-M-MOLA-5-MEGDR-L3-V1.0. 2003. Available online: https://pds.nasa.gov/ds-view/pds/viewProfile.jsp?dsid=MGS-M-MOLA-5-MEGDR-L3-V1.0 (accessed on 30 March 2022).
- Konopliv, A.S.; Park, R.S.; Folkner, W.M. An improved JPL Mars gravity field and orientation from Mars orbiter and lander tracking data. Icarus 2016, 274, 253–260. [Google Scholar] [CrossRef]
- Neumann, G.A.; Cavanaugh, J.F.; Coyle, D.B.; McGarry, J.; Smith, D.E.; Sun, X.; Torrence, M.; Zagwodski, T.W.; Zuber, M.T. Laser ranging at interplanetary distances. In Proceedings of the 15th International Workshop on Laser Ranging, Canberra, Australia, 15–20 October 2006. [Google Scholar]
- Kuchynka, P.; Folkner, W.M.; Konopliv, A.S.; Parker, T.J.; Park, R.S.; Le Maistre, S.; Dehant, V. New constraints on Mars rotation determined from radiometric tracking of the Opportunity Mars Exploration Rover. Icarus 2014, 229, 340–347. [Google Scholar] [CrossRef]
- Jacobson, R.A.; Konopliv, A.S.; Park, R.S.; Folkner, W.M. The rotational elements of Mars and its satellites. Planet. Space Sci. 2018, 152, 107–115. [Google Scholar] [CrossRef]
- Malin, M.C.; Bell, J.F.; Cantor, B.A.; Caplinger, M.A.; Calvin, W.M.; Clancy, R.T.; Edgett, K.S.; Edwards, L.; Haberle, R.M.; James, P.B.; et al. Context camera investigation on board the Mars Reconnaissance Orbiter. J. Geophys. Res. Planets 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Thomas, N.; Cremonese, G.; Ziethe, R.; Gerber, M.; Brändli, M.; Bruno, G.; Erismann, M.; Gambicorti, L.; Gerber, T.; Ghose, K.; et al. The Color and Stereo Surface Imaging System (CaSSIS) for the ExoMars Trace Gas Orbiter. Space Sci. Rev. 2017, 212, 1897–1944. [Google Scholar] [CrossRef] [Green Version]
- McEwen, A.S.; Eliason, E.M.; Bergstrom, J.W.; Bridges, N.T.; Hansen, C.J.; Delamere, W.A.; Grant, J.A.; Gulick, V.C.; Herkenhoff, K.E.; Keszthelyi, L.; et al. Mars reconnaissance orbiter’s high resolution imaging science experiment (HiRISE). J. Geophys. Res. Planets 2007, 112, E05S02. [Google Scholar] [CrossRef] [Green Version]
- Steinbrügge, G.; Haynes, M.S.; Schroeder, D.M.; Scanlan, K.M.; Stark, A.; Young, D.A.; Grima, C.; Kempf, S.; Ng, G.; Buhl, D.; et al. Altimetry measurements from planetary radar sounders and application to SHARAD on Mars. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Abshire, J.B.; Sun, X.; Afzal, R.S. Mars Orbiter Laser Altimeter: Receiver model and performance analysis. Appl. Opt. 2000, 39, 2449–2460. [Google Scholar] [CrossRef] [Green Version]
- Aharonson, O.; Zuber, M.T.; Rothman, D.H. Statistics of Mars’ topography from the Mars Orbiter Laser Altimeter: Slopes, correlations, and physical models. J. Geophys. Res. Planets 2001, 106, 23723–23735. [Google Scholar] [CrossRef]
- Harding, D.J.; Carabajal, C.C. ICESat waveform measurements of within-footprint topographic relief and vegetation vertical structure. Geophys. Res. Lett. 2005, 32, L21S10. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Abshire, J.B.; Borsa, A.A.; Fricker, H.A.; Yi, D.; DiMarzio, J.P.; Paolo, F.S.; Brunt, K.M.; Harding, D.J.; Neumann, G.A. ICESAT/GLAS altimetry measurements: Received signal dynamic range and saturation correction. IEEE Trans. Geosci. Remote. Sens. 2017, 55, 5440–5454. [Google Scholar] [CrossRef] [PubMed]
- Budge, S.; Leishman, B.; Pack, R. Simulation and modeling of return waveforms from a ladar beam footprint in USU LadarSIM. In Proceedings of the Laser Radar Technology and Applications XI, International Society for Optics and Photonics, Orlando, FL, USA, 19 May 2006; Volume 6214, p. 62140. [Google Scholar] [CrossRef] [Green Version]
- Jacob, D.; Gatt, P.; Nichols, T. Overview of LMCT’s advanced ladar signal simulator (ALASS). In Proceedings of the Laser Radar Technology and Applications XIII, International Society for Optics and Photonics, Orlando, FL, USA, 17 April 2008; Volume 6950, p. 69500. [Google Scholar] [CrossRef]
- Steinvall, O.K.; Carlsson, T. Three-dimensional laser radar modeling. In Proceedings of the Laser Radar Technology and Applications VI, International Society for Optics and Photonics, Orlando, FL, USA, 19 September 2001; Volume 4377, pp. 23–34. [Google Scholar] [CrossRef]
- Kirk, R.L.; Mayer, D.P.; Fergason, R.L.; Redding, B.L.; Galuszka, D.M.; Hare, T.M.; Gwinner, K. Evaluating stereo Digital Terrain Model quality at Mars rover landing sites with HRSC, CTX, and HiRISE images. Remote Sens. 2021, 13, 3511. [Google Scholar] [CrossRef]
- Kim, J.R.; Muller, J.P. Very high resolution stereo DTM extraction and its application to surface roughness estimation over Martian surface. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 993–998. [Google Scholar]
- Tao, Y.; Muller, J.P.; Sidiropoulos, P.; Xiong, S.T.; Putri, A.; Walter, S.; Veitch-Michaelis, J.; Yershov, V. Massive stereo-based DTM production for Mars on cloud computers. Planet. Space Sci. 2018, 154, 30–58. [Google Scholar] [CrossRef]
- Brown, A.J.; Michaels, T.I.; Byrne, S.; Sun, W.; Titus, T.N.; Colaprete, A.; Wolff, M.J.; Videen, G.; Grund, C.J. The case for a modern multiwavelength, polarization-sensitive LIDAR in orbit around Mars. J. Quant. Spectrosc. Radiat. Transf. 2015, 153, 131–143. [Google Scholar] [CrossRef] [Green Version]
- Genova, A. ORACLE: A mission concept to study Mars’ climate, surface and interior. Acta Astronaut. 2020, 166, 317–329. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, H.; Stark, A.; Chen, H.; Oberst, J. Recomputation and Updating of MOLA Geolocation. Remote Sens. 2022, 14, 2201. https://doi.org/10.3390/rs14092201
Xiao H, Stark A, Chen H, Oberst J. Recomputation and Updating of MOLA Geolocation. Remote Sensing. 2022; 14(9):2201. https://doi.org/10.3390/rs14092201
Chicago/Turabian StyleXiao, Haifeng, Alexander Stark, Hao Chen, and Jürgen Oberst. 2022. "Recomputation and Updating of MOLA Geolocation" Remote Sensing 14, no. 9: 2201. https://doi.org/10.3390/rs14092201
APA StyleXiao, H., Stark, A., Chen, H., & Oberst, J. (2022). Recomputation and Updating of MOLA Geolocation. Remote Sensing, 14(9), 2201. https://doi.org/10.3390/rs14092201