
A Machine Learning Strategy Based on Kittler’s Taxonomy to Detect Anomalies and Recognize Contexts Applied to Monitor Water Bodies in Environments

 , ,
, ,  , ,
, , 
Abstract
:1. Introduction
1.1. Kittler’s Taxonomy and Anomaly Detection
1.2. Contextualizing the Problem
1.3. The Proposal
2. Background
2.1. Theoretical Foundation
2.1.1. Domain and Image Time Series
2.1.2. Classifier
2.1.3. Incongruence
2.1.4. Outlier and Anomaly
2.1.5. DMS
2.1.6. Transfer Learning and Domain Adaptation
2.2. Related Work
2.2.1. Research on Outlier Detection
2.2.2. Research on Anomaly Detection
2.2.3. Research on Incongruence
3. Materials and Methods
3.1. Introducing the Machine Learning Strategy based on Kittler’s Taxonomy
3.2. Materials
3.3. Study Area
3.4. Method
3.4.1. Data Preprocessing
Adding Bands 1–7 of Landsat 8 Scene as Raster Layers
Building Band Composition R(4)G(3)B(2)
Performing Histogram Stretching, Choosing the Coordinate Reference System, and Adding Band 8
Performing Pan-Sharpening
Performing Histogram Stretching and Computing Second-Order Image Statistics
Performing Sampling or Domain Adaptation
End of Data Preprocessing
3.4.2. Learning and Classification
Importing Models or Performing Training, Validation, and Test of Classifiers
Creating Image Contextual and Non-Contextual Classifications
- Boost classifier
- (1)
- Definition of training sets.
- (2)
- Initialization of weights.
- (3)
- Training loop.For t = 1,2, ..., T (T is the maximum training number):
- (a)
- The training of a simple linear classifier hj is performed for each feature j. A simple linear classifier is a classifier restricted to use a single feature. The simple linear classifier is represented by Equation (15) [46], for which the value of the jth feature of the sample xi is denoted by xi,j. Moreover, the threshold value of the jth feature of the sample xi is expressed by θi,j, and the direction of the inequality sign is decided by pj {−1, 1}. The error εt is evaluated regarding Dt(xi, yi), in accordance to Equation (16) [46].
- (b)
- The weak classifier ht with the lowest error εt is chosen.
- (c)
- The loop stops for εt ≥ 1/2.
- (d)
- the weight αt is calculated for εt < 1/2. The αt is the weight assigned to the classifier ht. Equation (17) represents the weight αt.
- (e)
- (4)
- Output of the final classifier.
- DT classifier
Subtracting Images and Establishing Chronology
End of Learning and Classification
4. Results
4.1. Experimental Results
4.2. Interpretation of the Results
4.2.1. Accuracy, Recall, Precision, and F-Measure
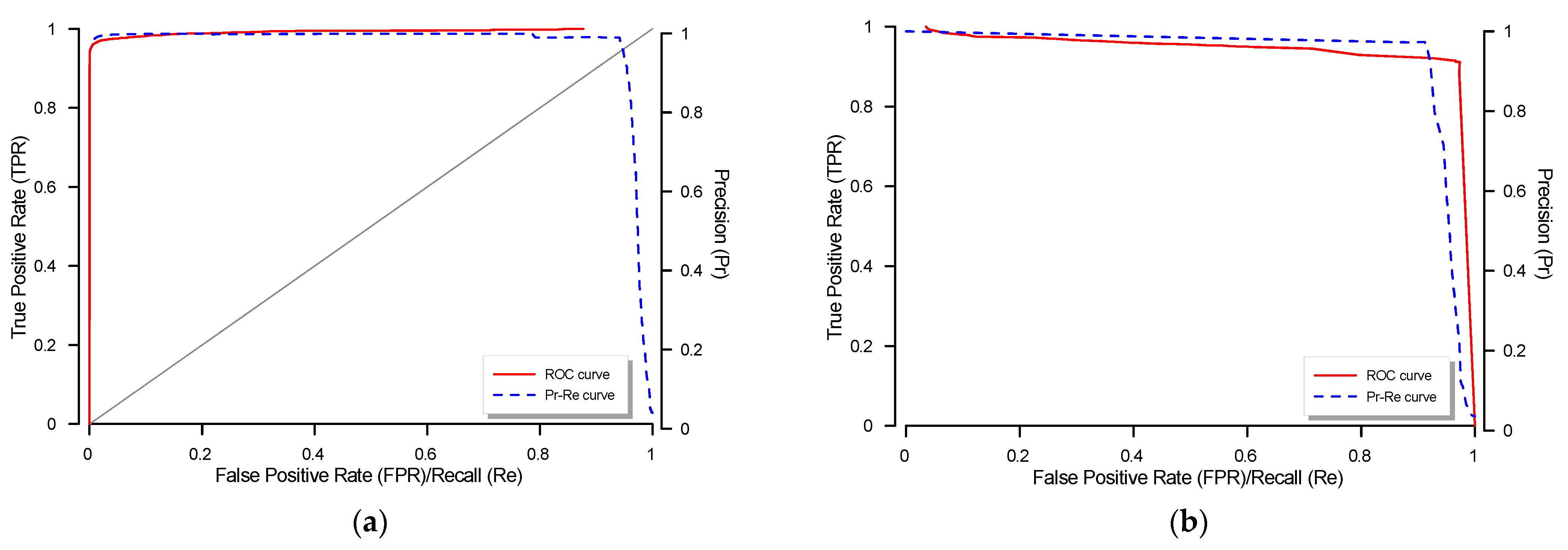
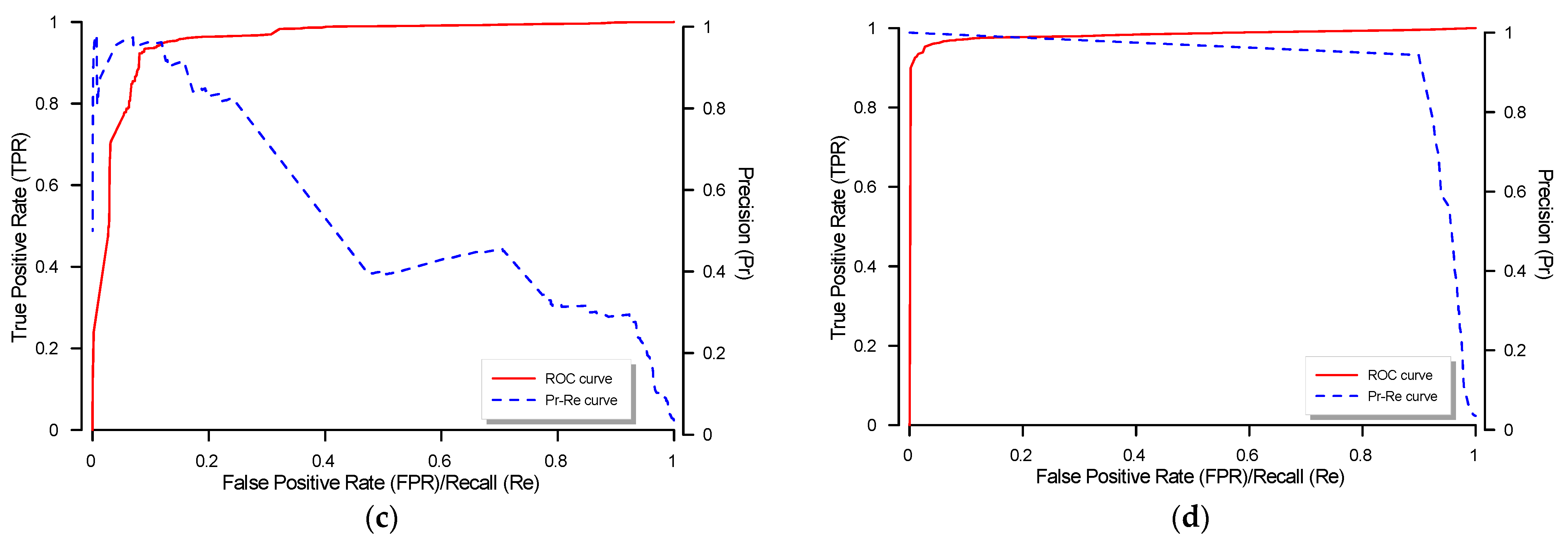
4.2.2. Receiver Operating Characteristic and Precision-Recall Curves and Area under Curve Measurements
4.2.3. Overall Accuracy, Kappa Coefficient, and Its Variance
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Parameters
References
- Nazeer, M.; Nichol, J.E. Combining Landsat TM/ETM+ and HJ-1 A/B CCD sensors for monitoring coastal water quality in Hong Kong. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1898–1902. [Google Scholar] [CrossRef]
- Ha, N.T.T.; Koike, K.; Nhuan, M.T.; Canh, B.D.; Thao, N.T.P.; Parsons, M. Landsat 8/OLI two bands ratio algorithm for Chlorophyll-A concentration mapping in hypertrophic waters: An application to West Lake in Hanoi (Vietnam). IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4919–4929. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, W.-N.; Tian, Y.Q.; Yu, Q. Estimation of colored dissolved organic matter from Landsat-8 imagery for complex inland water: Case study of Lake Huron. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2201–2212. [Google Scholar] [CrossRef]
- Kotchi, S.O.; Brazeau, S.; Turgeon, P.; Pelcat, Y.; Légaré, J.; Lavigne, M.-P.; Essono, F.N.; Fournier, R.A.; Michel, P. Evaluation of Earth observation systems for estimating environmental determinants of microbial contamination in recreational waters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3730–3741. [Google Scholar] [CrossRef]
- Chang, N.-B.; Vannah, B.; Yang, Y.J. Comparative sensor fusion between hyperspectral and multispectral satellite sensors for monitoring microcystin distribution in Lake Erie. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2426–2442. [Google Scholar] [CrossRef]
- Li, Z.; Liu, H.; Luo, C.; Li, P.; Li, H.; Xiong, Z. Industrial wastewater discharge retrieval based on stable nighttime light imagery in China from 1992 to 2010. Remote Sens. 2014, 6, 7566–7579. [Google Scholar] [CrossRef] [Green Version]
- Shoujing, Y.; Qiao, W.; Chuanqing, W.; Xiaoling, C.; Wandong, M.; Huiqin, M. A robust anomaly based change detection method for time series remote sensing images. In IOP Conference Series: Earth and Environmental Science; IOP Publishing Ltd.: Bristol, UK, 2014; Volume 17, p. 012059. [Google Scholar]
- Zhou, Z.-G.; Tang, P.; Zhou, M. Detecting Anomaly Regions in Satellite Image Time Series Based on Seasonal Autocorrelation Analysis. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing Spatial Information Science (XXIII ISPRS Congress), Prague, Czech Republic, 12–19 July 2016; pp. 303–310. [Google Scholar]
- Chandola, V.; Vatsavai, R.R. A Gaussian Process Based Online Change Detection Algorithm For Monitoring Periodic Time Series. In Proceedings of the 2011 SIAM International Conference on Data Mining, Society for Industrial and Applied Mathematics, Mesa, AZ, USA, 28–30 April 2011; pp. 95–106. [Google Scholar] [CrossRef] [Green Version]
- Committee on Developments in the Science of Learning; Committee on Learning Research and Educational Practice & National Research Council. How People Learn: Brain, Mind, Experience, and School, Expanded ed.; National Academy Press: Washington, DC, USA, 2000. [Google Scholar]
- Mustard, J.F.; Sunshine, J.M. Spectral analysis for earth science: Investigations using remote sensing data. Remote Sens. Earth Sci. Man. Remote Sens. 1999, 3, 251–307. [Google Scholar]
- Verstraete, M.M.; Pinty, B. Designing optimal spectral indexes for remote sensing applications. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1254–1265. [Google Scholar] [CrossRef]
- Brezonik, P.L.; Olmanson, L.G.; Finlay, J.C.; Bauer, M.E. Factors affecting the measurement of CDOM by remote sensing of optically complex inland waters. Remote Sens. Environ. 2015, 157, 199–215. [Google Scholar] [CrossRef]
- Xie, X.; Li, B. A Unified Framework of Multiple Kernels Learning for Hyperspectral Remote Sensing Big Data. J. Inf. Hiding Multimed. Signal. Process. 2016, 7, 296–303. [Google Scholar]
- Li, Y.; Li, J.; Pan, J.-S. Hyperspectral Image Recognition Using SVM Combined Deep Learning. J. Internet Technol. 2019, 20, 851–859. [Google Scholar]
- Sublime, J.; Kalinicheva, E. Automatic post-disaster damage mapping using deep-learning techniques for change detection: Case study of the Tohoku tsunami. Remote Sens. 2019, 11, 1123. [Google Scholar] [CrossRef] [Green Version]
- Tan, C.; Sun, F.; Kong, T.; Zhang, W.; Yang, C.; Liu, C. A Survey on Deep Transfer Learning. In Proceedings of the 27th International Conference on Artificial Neural Networks, 4–7 October 2018, Rhodes, Greece; Springer: Cham, Switzerland, 2018; pp. 270–279. [Google Scholar]
- Lu, J.; Behbood, V.; Hao, P.; Zuo, H.; Xue, S.; Zhang, G. Transfer learning using computational intelligence: A survey. Knowl. Based Syst. 2015, 80, 14–23. [Google Scholar] [CrossRef]
- Shao, L.; Zhu, F.; Li, X. Transfer learning for visual categorization: A survey. IEEE Trans. Neural Netw. Learn. Syst. 2014, 26, 1019–1034. [Google Scholar] [CrossRef] [PubMed]
- Cook, D.; Feuz, K.D.; Krishnan, N.C. Transfer learning for activity recognition: A survey. Knowl. Inf. Syst. 2013, 36, 537–556. [Google Scholar] [CrossRef] [Green Version]
- Sun, S. A survey of multi-view machine learning. Neural Comput. Appl. 2013, 23, 2031–2038. [Google Scholar] [CrossRef]
- Xu, Q.; Yang, Q. A survey of transfer and multitask learning in bioinformatics. J. Comput. Sci. Eng. 2011, 5, 257–268. [Google Scholar] [CrossRef] [Green Version]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2010, 22, 1345–1359. [Google Scholar] [CrossRef]
- Taylor, M.E.; Stone, P. Transfer learning for reinforcement learning domains: A survey. J. Mach. Learn. Res. 2009, 10, 1633–1685. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Ma, L.; Crawford, M.M.; Tian, J. Local manifold learning-based k-Nearest-Neighbor for hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4099–4109. [Google Scholar] [CrossRef]
- Kittler, J.; Christmas, W.; de Campos, T.; Windridge, D.; Yan, F.; Illingworth, J.; Osman, M. Domain anomaly detection in machine perception: A system architecture and taxonomy. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 845–859. [Google Scholar] [CrossRef] [Green Version]
- Ponti, M.; Kittler, J.; Riva, M.; de Campos, T.; Zor, C. A decision cognizant Kullback–Leibler divergence. Pattern Recognit. 2017, 61, 470–478. [Google Scholar] [CrossRef] [Green Version]
- Kittler, J.; Zor, C. Delta divergence: A novel decision cognizant measure of classifier incongruence. IEEE Trans. Cybern. 2018, 99, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Kittler, J.; Zor, C. A Measure of Surprise for Incongruence Detection. In Proceedings of the 2nd International Conference on Intelligent Signal Processing (ISP), London, UK, 1–2 December 2015; IET: London, UK, 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Dias, M.A.; Silva, E.A.d.; Azevedo, S.C.d.; Casaca, W.; Statella, T.; Negri, R.G. An incongruence-based anomaly detection strategy for analyzing water pollution in images from remote sensing. Remote Sens. 2020, 12, 43. [Google Scholar] [CrossRef] [Green Version]
- Chandola, V.; Banerjee, A.; Kumar, V. Outlier detection: A survey. ACM Comput. Surv. (CSUR) 2007, 14, 1–83. [Google Scholar]
- Gupta, M.; Gao, J.; Aggarwal, C.C.; Han, J. Outlier detection for temporal data: A survey. IEEE Trans. Knowl. Data Eng. 2013, 26, 2250–2267. [Google Scholar] [CrossRef]
- Zimek, A.; Schubert, E.; Kriegel, H.P. A survey on unsupervised outlier detection in high-dimensional numerical data. Stat. Anal. Data Min. ASA Data Sci. J. 2012, 5, 363–387. [Google Scholar] [CrossRef]
- Gogoi, P.; Bhattacharyya, D.K.; Borah, B.; Kalita, J.K. A survey of outlier detection methods in network anomaly identification. Comput. J. 2011, 54, 570–588. [Google Scholar] [CrossRef] [Green Version]
- Niu, Z.; Shi, S.; Sun, J.; He, X. A Survey of Outlier Detection Methodologies and Their Applications. In Proceedings of the International Conference on Artificial Intelligence and Computational Intelligence, Taiyuan, China, 24–25 September 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 380–387. [Google Scholar]
- Hodge, V.; Austin, J. A survey of outlier detection methodologies. Artif. Intell. Rev. 2004, 22, 85–126. [Google Scholar] [CrossRef] [Green Version]
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly detection: A survey. ACM Comput. Surv. (CSUR) 2009, 41, 1–72. [Google Scholar] [CrossRef]
- Weinshall, D.; Zweig, A.; Hermansky, H.; Kombrink, S.; Ohl, F.W.; Anemuller, J.; Bach, J.-H.; Gool, L.V.; Nater, F.; Pajdla, T.; et al. Beyond novelty detection: Incongruent events, when general and specific classifiers disagree. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1886–1901. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, C.H. Handbook of Pattern Recognition and Computer Vision, 5th ed.; World Scientific: Singapore, 2015. [Google Scholar]
- Jahne, B. Computer Vision and Applications: A Guide for Students and Practitioners, 1st ed.; Elsevier: London, UK, 2000. [Google Scholar]
- Li, M.; Zang, S.; Zhang, B.; Li, S.; Wu, C. A review of remote sensing image classification techniques: The role of spatio-contextual information. Eur. J. Remote Sens. 2014, 47, 389–411. [Google Scholar] [CrossRef]
- Schowengerdt, R.A. Remote Sensing: Models and Methods for Image Processing, 3rd ed.; Elsevier: London, UK, 2006. [Google Scholar]
- Richards, J.A.; Jia, X. Remote Sensing Digital Image Analysis, 1st ed.; Springer: Berlin, Germany, 1999. [Google Scholar]
- Asht, S.; Dass, R. Pattern recognition techniques: A review. Int. J. Comput. Sci. Telecommun. 2012, 3, 25–29. [Google Scholar]
- Shen, L.; Li, C. Water Body Extraction from Landsat ETM+ Imagery Using Adaboost Algorithm. In Proceedings of the IEEE 2010 18th International Conference on Geoinformatics, Beijing, China, 18–20 June 2010. [Google Scholar] [CrossRef]
- Blanzieri, E.; Melgani, F. Nearest Neighbor Classification of remote sensing images with the maximal margin principle. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1804–1811. [Google Scholar] [CrossRef]
- Swain, P.H.; Hauska, H. The decision tree classifier: Design and potential. IEEE Trans. Geosci. Electron. 1977, 15, 142–147. [Google Scholar] [CrossRef]
- Yi-Bin, L.; Ying-Ying, W.; Xue-Wen, R. Improvement of ID3 Algorithm Based on Simplified Information Entropy and Coordination Degree. In Proceedings of the Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; IEEE: Toulouse, France, 2017; pp. 1526–1530. [Google Scholar] [CrossRef]
- Earth Resources Observation and Science (EROS) Center. Landsat Data Dictionary. Available online: https://www.usgs.gov/centers/eros/science/landsat-data-dictionary#image_quality_landsat_8 (accessed on 30 March 2022).
- Tan, P.-N.; Steinbach, M.; Karpatne, A.; Kumar, V. Introduction to Data Mining, 2nd ed.; Pearson Education: Noida, India, 2018. [Google Scholar]
- OTB Development Team. The Orfeo ToolBox Cookbook, a Guide for Non-Developers Updated for OTB-5.6.0. 2011. Available online: https://www.orfeo-toolbox.org/packages/archives/Doc/CookBook-5.6.0.pdf (accessed on 30 March 2022).
- Tuia, D.; Persello, C.; Bruzzone, L. Domain adaptation for the classification of remote sensing data: An overview of recent advances. IEEE Geosci. Remote Sens. Mag. 2016, 4, 41–57. [Google Scholar] [CrossRef]
- Gretton, A.; Borgwardt, K.M.; Rasch, M.J.; Schölkopf, B.; Smola, A. A kernel two-sample test. J. Mach. Learn. Res. 2012, 13, 723–773. [Google Scholar]
- Liu, Q.; Klucik, R.; Chen, C.; Grant, G.; Gallaher, D.; Lv, Q.; Shang, L. Unsupervised detection of contextual anomaly in remotely sensed data. Remote Sens. Environ. 2017, 202, 75–87. [Google Scholar] [CrossRef]
- Bhaduri, K.; Das, K.; Votava, P. Distributed Anomaly Detection Using Satellite Data from Multiple Modalities. In Proceedings of the 2010 Conference on Intelligent Data Understanding, CIDU 2010, Mountain View, CA, USA, 5–6 October 2010. [Google Scholar]
- Bormann, K.J.; McCabe, M.F.; Evans, J.P. Satellite based observations for seasonal snow cover detection and characterization in Australia. Remote Sens. Environ. 2012, 123, 57–71. [Google Scholar] [CrossRef]
- Che, X.; Feng, M.; Sexton, J.; Channan, S.; Sun, Q.; Ying, Q.; Liu, J.; Wang, Y. Landsat-based estimation of seasonal water cover and change in arid and semi-arid Central Asia (2000–2015). Remote Sens. 2019, 11, 1323. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Fan, R.; Yang, X.; Wang, J.; Latif, A. Extraction of urban water bodies from high-resolution remote-sensing imagery using deep learning. Water 2018, 10, 585. [Google Scholar] [CrossRef] [Green Version]
- Natesan, S.; Armenakis, C.; Benari, G.; Lee, R. Use of UAV-borne spectrometer for land cover classification. Drones 2018, 2, 16. [Google Scholar] [CrossRef] [Green Version]
- Yang, K.; Li, M.; Liu, Y.; Cheng, L.; Huang, Q.; Chen, Y. River detection in remotely sensed imagery using Gabor Filtering and path opening. Remote Sens. 2015, 7, 8779–8802. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, G.W.; Goulart, F.F.; Ranieri, B.D.; Coelho, M.S.; Dales, K.; Boesche, N.; Bustamante, M.; Carvalho, F.A.; Carvalho, D.C.; Dirzo, R.; et al. Deep into the mud: Ecological and socio-economic impacts of the dam breach in Mariana, Brazil. Braz. J. Nat. Conserv. 2016, 14, 35–45. [Google Scholar] [CrossRef]
- Mielke, C.; Boesche, N.K.; Rogass, C.; Kaufmann, H.; Gauert, C.; de Wit, M. Spaceborne mine waste mineralogy monitoring in South Africa, applications for modern push-broom missions: Hyperion/OLI and EnMAP/Sentinel-2. Remote Sens. 2014, 6, 6790–6816. [Google Scholar] [CrossRef] [Green Version]
- Rosell-Melé, A.; Moraleda-Cibrián, N.; Cartró-Sabaté, M.; Colomer-Ventura, F.; Mayor, P.; Orta-Martínez, M. Oil pollution in soils and sediments from the Northern Peruvian Amazon. Sci. Total Environ. 2018, 610, 1010–1019. [Google Scholar] [CrossRef]
- QGIS Development Team. Available online: https://www.qgis.org/ (accessed on 25 April 2018).
- USGS—The United States Geological Survey, “Earth Explorer”. Available online: https://earthexplorer.usgs.gov/ (accessed on 25 April 2018).
- Gonzales, R.C.; Woods, R.E. Digital Image Processing, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- QGIS Project. QGIS User Guide Release 2.18. 2019. Available online: https://docs.qgis.org/2.18/pdf/en/QGIS-2.18-UserGuide-en.pdf (accessed on 30 March 2022).
- Vivone, G.; Alparone, L.; Chanussot, J.; Mura, M.D.; Garzelli, A.; Licciardi, G.A.; Restaino, R.; Wald, L. A critical comparison among pansharpening algorithms. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2565–2586. [Google Scholar] [CrossRef]
- Reinhard, E.; Shirley, P.; Ashikhmin, M.; Troscianko, T. Second Order Image Statistics in Computer Graphics. In Proceedings of the 1st Symposium on Applied Perception in Graphics and Visualization (APGV’04), Los Angeles, CA, USA, 7–8 August 2004; pp. 99–106. [Google Scholar]
- OTB Development Team. The On-Line Orfeo ToolBox Cookbook, a Guide for Non-Developers Updated for OTB-3.10. 2011. Available online: https://www.orfeo-toolbox.org/packages/doc/tests-rfc-52/cookbook-3b41671/Applications/app_TrainImagesClassifier.html (accessed on 25 April 2018).
- Chen, C.; Yang, B.; Song, S.; Peng, X.; Huang, R. Automatic clearance anomaly detection for transmission line corridors utilizing UAV-Borne LIDAR Data. Remote Sens. 2018, 10, 613. [Google Scholar] [CrossRef] [Green Version]
- Congalton, R.G.; Mead, R.A. A review of three discrete multivariate analysis techniques used in assessing the accuracy of remotely sensed data from error matrices. IEEE Trans. Geosci. Remote Sens. 1986, GE-24, 169–174. [Google Scholar] [CrossRef]
- Marzano, F.S.; Scaranari, D.; Montopoli, M.; Vulpiani, G. Supervised classification and estimation of hydrometeors from C-Band dual-polarized radars: A Bayesian approach. IEEE Trans. Geosci. Remote Sens. 2008, 46, 85–98. [Google Scholar] [CrossRef]
- Indu, J.; Kumar, D.N. Evaluation of precipitation retrievals from orbital data products of TRMM over a subtropical basin in India. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6429–6442. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Bernardo, N.; do Carmo, A.; Park, E.; Alcântara, E. Retrieval of suspended particulate matter in inland waters with widely differing optical properties using a semi-analytical scheme. Remote Sens. 2019, 11, 2283. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Du, Q. A survey on representation-based classification and detection in hyperspectral remote sensing imagery. Pattern Recognit. Lett. 2016, 83, 115–123. [Google Scholar] [CrossRef]
- Zhang, J. Advancements of outlier detection: A survey. ICST Trans. Scalable Inf. Syst. 2013, 13, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Frontera-Pons, J.; Veganzones, M.A.; Pascal, F.; Ovarlez, J.P. Hyperspectral anomaly detectors using robust estimators. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 720–731. [Google Scholar] [CrossRef] [Green Version]
- Matteoli, S.; Diani, M.; Theiler, J. An overview of background modeling for detection of targets and anomalies in hyperspectral remotely sensed imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2317–2336. [Google Scholar] [CrossRef]
- Matteoli, S.; Veracini, T.; Diani, M.; Corsini, G. Models and methods for automated background density estimation in hyperspectral anomaly detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 51, 2837–2852. [Google Scholar] [CrossRef]
- Matteoli, S.; Diani, M.; Corsini, G. A tutorial overview of anomaly detection in hyperspectral images. IEEE Aerosp. Electron. Syst. Mag. 2010, 25, 5–28. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Issue | Study | |
|---|---|---|
| [31] | Ours | |
| Type of anomaly investigated | Unexpected structure and structural components | Component model drift |
| Main context analyzed | Spatial | Temporal |
| Applicable to time series | No | Yes |
| Number of Landsat 8 images studied with resolution of 15,705 × 15,440 (height and width in pixels) | One | Eight |
| Analyze drift | No | Yes |
| Number of images analyzed with resolution of 151 × 193 (height and width in pixels) | 8400 | 67,200 |
| Seasons of the year studied (regarding the Southern Hemisphere) | Spring | Spring, summer, fall, and winter |
| Presence in the scene of effects caused by an environmental disaster registered in the image used to create the main models for classifications | Yes | No |
| Years studied | 2015 | 2013, 2014, 2015, 2016, 2017, 2018, 2019, and 2020 |
| Atmospheric conditions | Stable | Variable |
| Year of the reference image | 2015 | 2013 |
| Perform domain adaptation | No | Yes |
| Condition of the land cover analyzed | Stable | Variable |
| Number of samplings related to the domains studied | One per domain | One for all domains |
| Year of the image in which the sampling was performed | 2015 | 2013 |
| Perform transfer learning | No | Yes |
| Presence of changes in the scene caused by human activities | Unnoticeable | Multiple |
| Modeling | Two particular models per domain | Two main models for all domains (they are adapted to each domain) |
| Angle of incidence of the sunlight | Single | Multiple |
| Number of years needed to finish the study with success | Two | Three |
| Landsat 8 Image (Scene) | Date of the: Image Acquisition/ Environmental Disaster |
|---|---|
| LC08_L1TP_217074_20130903_20170502_01_T1 | 3 September 2013 None |
| LC08_L1TP_217074_20140805_20170420_01_T1 | 5 August 2014 None |
| LC08_L1TP_217074_20151112_20170402_01_T1 | 12 November 2015 5 November 2015 |
| LC08_L1TP_217074_20160810_20170322_01_T1 | 10 August 2016 None |
| LC08_L1TP_217074_20170829_20170914_01_T1 | 29 August 2017 None |
| LC08_L1TP_217074_20181222_20181227_01_T1 | 22 December 2018 None |
| LC08_L1TP_217074_20190904_20190917_01_T1 | 4 September 2019 None |
| LC08_L1TP_217074_20200501_20200509_01_T1 | 1 May 2020 None |
| Landsat 8 Band Used. | Wavelength | Resolution |
|---|---|---|
| Band 1—Coastal Aerosol | 0.43–0.45 µm | 30 m |
| Band 2—Blue | 0.45–0.51 µm | 30 m |
| Band 3—Green | 0.53–0.59 µm | 30 m |
| Band 4—Red | 0.64–0.67 µm | 30 m |
| Band 5—Near Infrared (NIR) | 0.85–0.88 µm | 30 m |
| Band 6—SWIR 1 | 1.57–1.65 µm | 30 m |
| Band 7—SWIR 2 | 2.11–2.29 µm | 30 m |
| Element of Equation | Meaning |
|---|---|
| MS | Multispectral image |
| Pan-sharpened image | |
| Multispectral image interpolated at the scale of the panchromatic image | |
| K | Subscript k indicates the kth spectral band |
| g = [g1,…, gk,….,gN] | Vector of injection gains |
| P | Histogram-matched panchromatic image |
| w = [w1,…, wi,…, wN] | Weight vector |
| Congruent Event | Incongruent Event | |
|---|---|---|
| Detection congruent | TP = 8367 | FP = 0 |
| Detection incongruent | FN = 33 | TN = 0 |
| Congruent Event | Incongruent Event | |
|---|---|---|
| Detection congruent | TP = 8349 | FP = 0 |
| Detection incongruent | FN = 51 | TN = 0 |
| Congruent Event | Incongruent Event | |
|---|---|---|
| Detection congruent | TP = 8228 | FP = 2 |
| Detection incongruent | FN = 104 | TN = 66 |
| Congruent Event | Incongruent Event | |
|---|---|---|
| Detection congruent | TP = 8361 | FP = 0 |
| Detection incongruent | FN = 39 | TN = 0 |
| Congruent Event | Incongruent Event | |
|---|---|---|
| Detection congruent | TP = 8328 | FP = 0 |
| Detection incongruent | FN = 72 | TN = 0 |
| Congruent Event | Incongruent Event | |
|---|---|---|
| Detection congruent | TP = 8318 | FP = 0 |
| Detection incongruent | FN = 82 | TN = 0 |
| Congruent Event | Incongruent Event | |
|---|---|---|
| Detection congruent | TP = 8301 | FP = 0 |
| Detection incongruent | FN = 99 | TN = 0 |
| Congruent Event | Incongruent Event | |
|---|---|---|
| Detection congruent | TP = 8302 | FP = 0 |
| Detection incongruent | FN = 98 | TN = 0 |
| Landsat 8 Scene | Accuracy | Precision | Recall | F-Measure |
|---|---|---|---|---|
| LC08_L1TP_217074_20130903_20170502_01_T1 | 99.61% | 100% | 99.61% | 99.81% |
| LC08_L1TP_217074_20140805_20170420_01_T1 | 99.39% | 100% | 99.39% | 99.69% |
| LC08_L1TP_217074_20151112_20170402_01_T1 | 98.74% | 99.98% | 98.75% | 99.36% |
| LC08_L1TP_217074_20160810_20170322_01_T1 | 99.54% | 100% | 99.54% | 99.77% |
| LC08_L1TP_217074_20170829_20170914_01_T1 | 99.14% | 100% | 99.14% | 99.57% |
| LC08_L1TP_217074_20181222_20181227_01_T1 | 99.02% | 100% | 99.02% | 99.51% |
| LC08_L1TP_217074_20190904_20190917_01_T1 | 98.82% | 100% | 98.82% | 99.41% |
| LC08_L1TP_217074_20200501_20200509_01_T1 | 98.83% | 100% | 98.83% | 99.41% |
| Results obtained averaging the values of this table (2014–2020) | 99.07% | 99.99% | 99.07% | 99.53% |
| Study | Accuracy | Precision | Recall | F-Measure |
|---|---|---|---|---|
| [31] | 99.76% | 100.00% | 99.76% | 99.88% |
| [58] | 99.59% | ---------- | ---------- | ---------- |
| [57] | 99.20% | 91.85% | 53.55% | 67.66% |
| [59] | 99.14% | ---------- | ---------- | ---------- |
| Ours | 99.07% | 99.99% | 99.07% | 99.53% |
| [7] | 98.49% | 83.84% | 83.66% | 83.76% |
| [56] | 98.00% | ---------- | ---------- | ---------- |
| [55] | 91.20% | 98.10% | 95.7% | 96.88% |
| [8] | 88.68% | 90.62% | 79.62% | 84.76% |
| [16] | 84.00% | 63.00% | 81.00% | 70.88% |
| [60] | 81.18% | ---------- | ---------- | ---------- |
| [9] | 78.00% | 82.00% | 75.00% | 78.34% |
| Measure | 2014 | 2015 | 2016 | |
|---|---|---|---|---|
| Boost | OA | 0.95576344 | 0.98661989 | 0.94951084 |
| Kappa | 0.58219884 | 0.8214931 | 0.5424097 | |
| Var.Kapp | 1.3828607 × 10−5 | 1.0082267 × 10−5 | 1.3873299 × 10−5 | |
| DT | OA | 0.96155206 | 0.84809506 | 0.93850362 |
| Kappa | 0.61801729 | 0.26374463 | 0.49920605 | |
| Var.Kapp | 0.000013833488 | 0.0000062081885 | 0.000012732607 | |
| Significance | p-value (two-sided) | 0.00000000000244 | 0.00000000000000 | 0.000000000000 |
| test for kappa | Significant? | Yes: Boost < DT | Yes: Boost > DT | Yes: Boost > DT |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dias, M.A.; Marinho, G.C.; Negri, R.G.; Casaca, W.; Muñoz, I.B.; Eler, D.M. A Machine Learning Strategy Based on Kittler’s Taxonomy to Detect Anomalies and Recognize Contexts Applied to Monitor Water Bodies in Environments. Remote Sens. 2022, 14, 2222. https://doi.org/10.3390/rs14092222
Dias MA, Marinho GC, Negri RG, Casaca W, Muñoz IB, Eler DM. A Machine Learning Strategy Based on Kittler’s Taxonomy to Detect Anomalies and Recognize Contexts Applied to Monitor Water Bodies in Environments. Remote Sensing. 2022; 14(9):2222. https://doi.org/10.3390/rs14092222
Chicago/Turabian StyleDias, Maurício Araújo, Giovanna Carreira Marinho, Rogério Galante Negri, Wallace Casaca, Ignácio Bravo Muñoz, and Danilo Medeiros Eler. 2022. "A Machine Learning Strategy Based on Kittler’s Taxonomy to Detect Anomalies and Recognize Contexts Applied to Monitor Water Bodies in Environments" Remote Sensing 14, no. 9: 2222. https://doi.org/10.3390/rs14092222
APA StyleDias, M. A., Marinho, G. C., Negri, R. G., Casaca, W., Muñoz, I. B., & Eler, D. M. (2022). A Machine Learning Strategy Based on Kittler’s Taxonomy to Detect Anomalies and Recognize Contexts Applied to Monitor Water Bodies in Environments. Remote Sensing, 14(9), 2222. https://doi.org/10.3390/rs14092222