
Low Observable Radar Target Detection Method within Sea Clutter Based on Correlation Estimation


Abstract
:
1. Introduction
- (1)
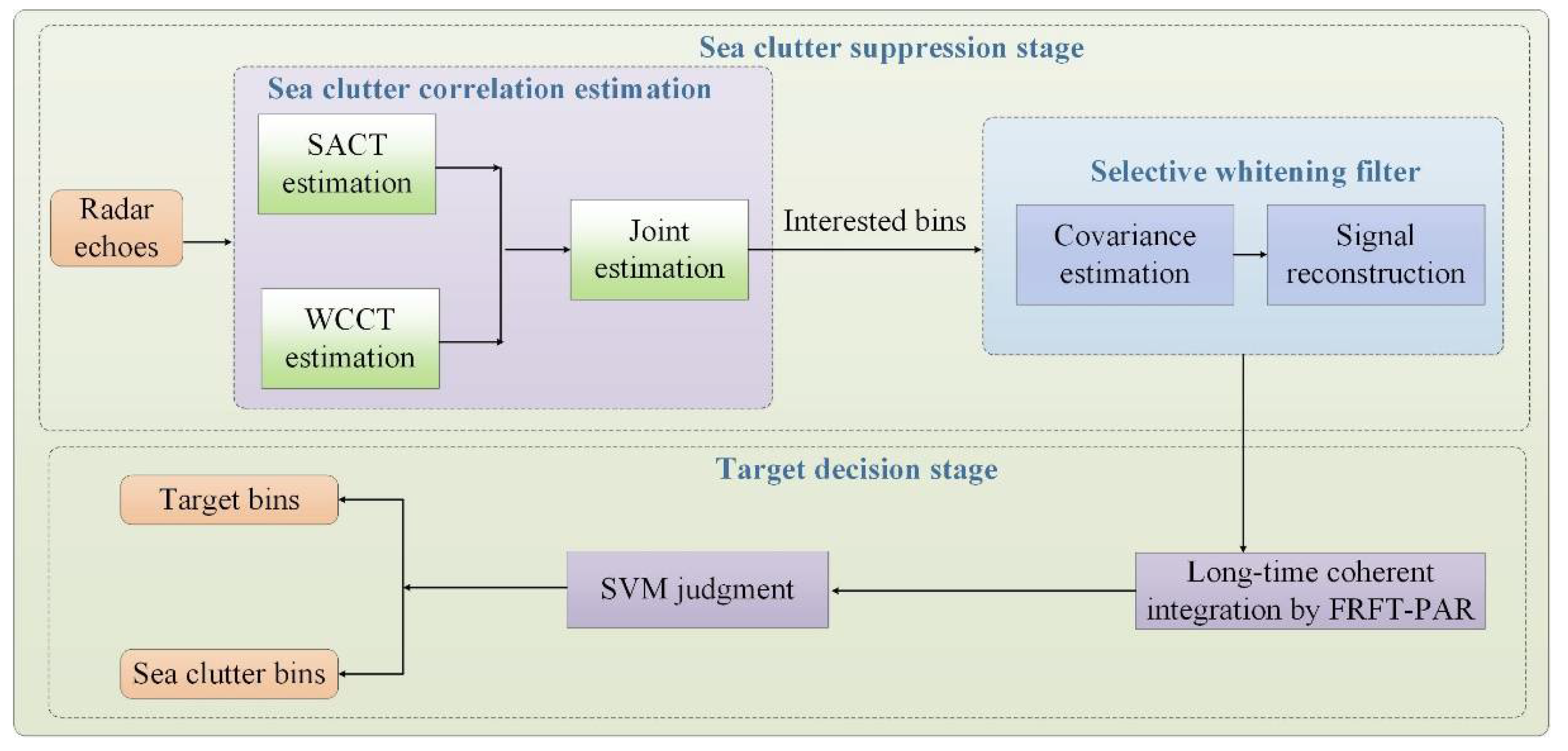
- A correlation estimation method of sea clutter based on correlation time is proposed. The correlation of sea clutter is evaluated by calculating the correlation time in both time and space domains. According to the estimation results, the sea clutter in different range bins is suppressed.
- (2)
- A selective whitening filter is proposed. In the selective whitening filter, the processing bins are selected adaptively according to the sea clutter correlation estimation results, which can facilitate the suppression of the sea clutter in the target echo components and reduce the computational load.
- (3)
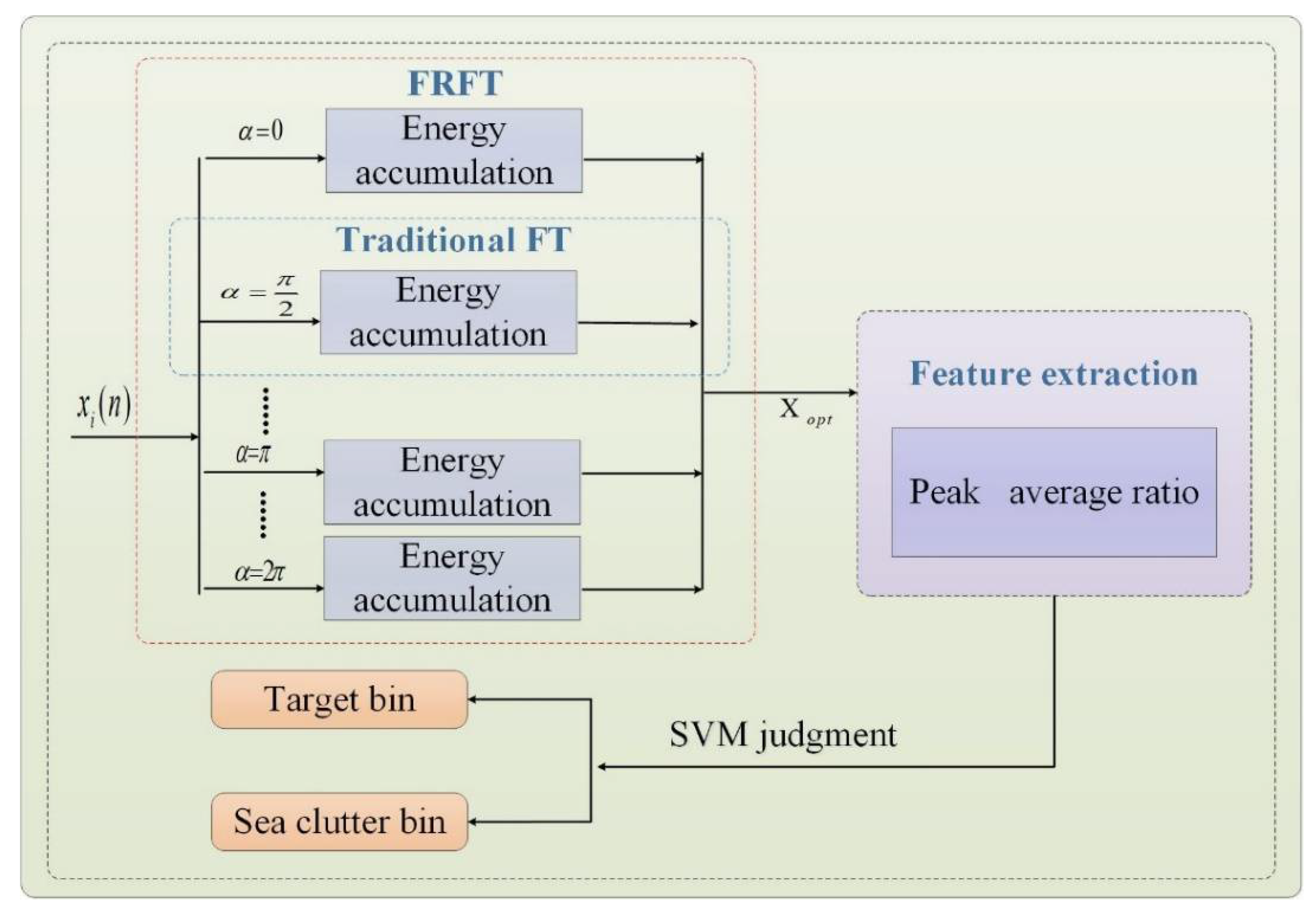
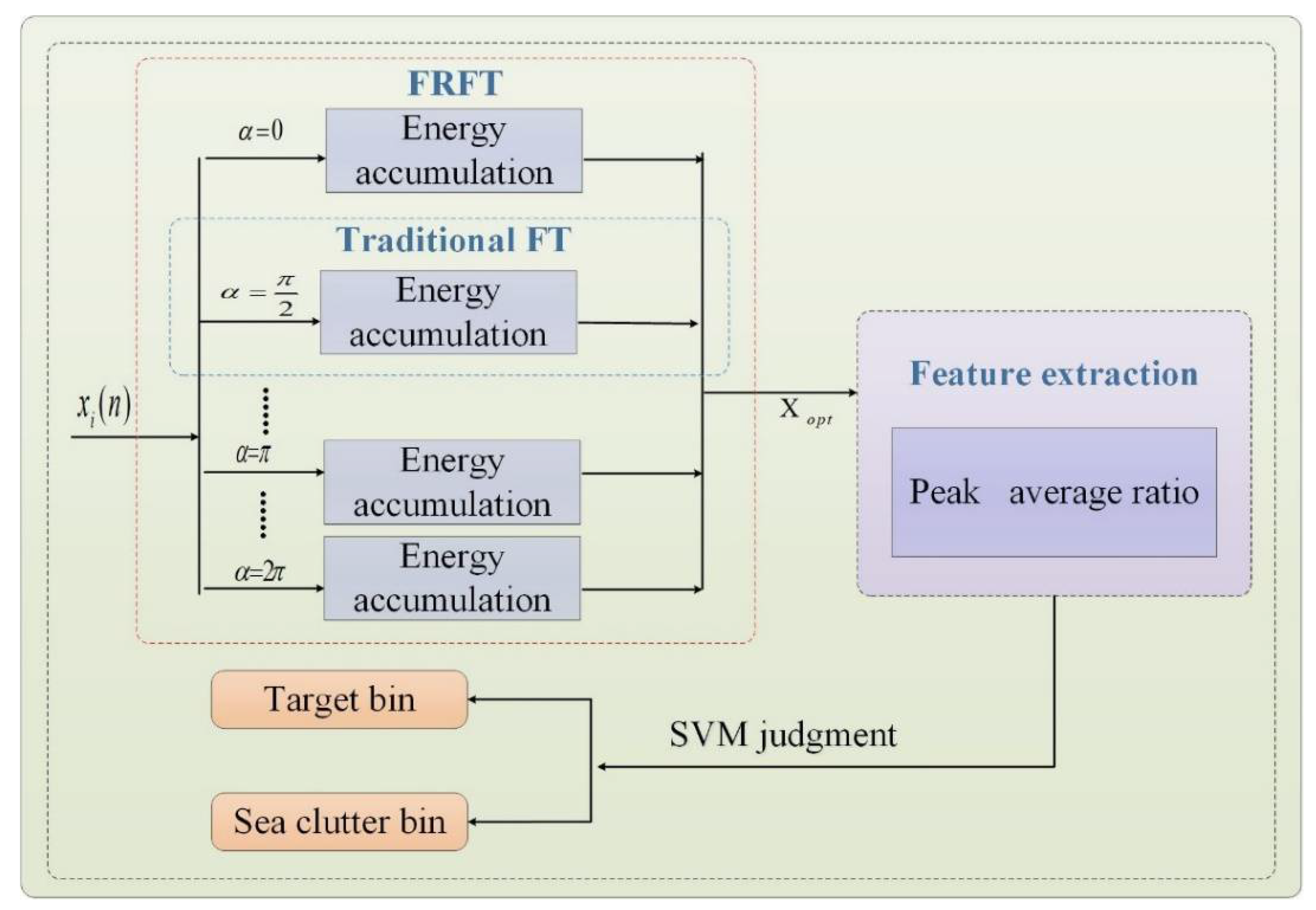
- The FRFT-PAR is presented to distinguish between the sea clutter and target, which is adopted to make better use of the energy accumulation characteristics and further suppress the interference of sea clutter.
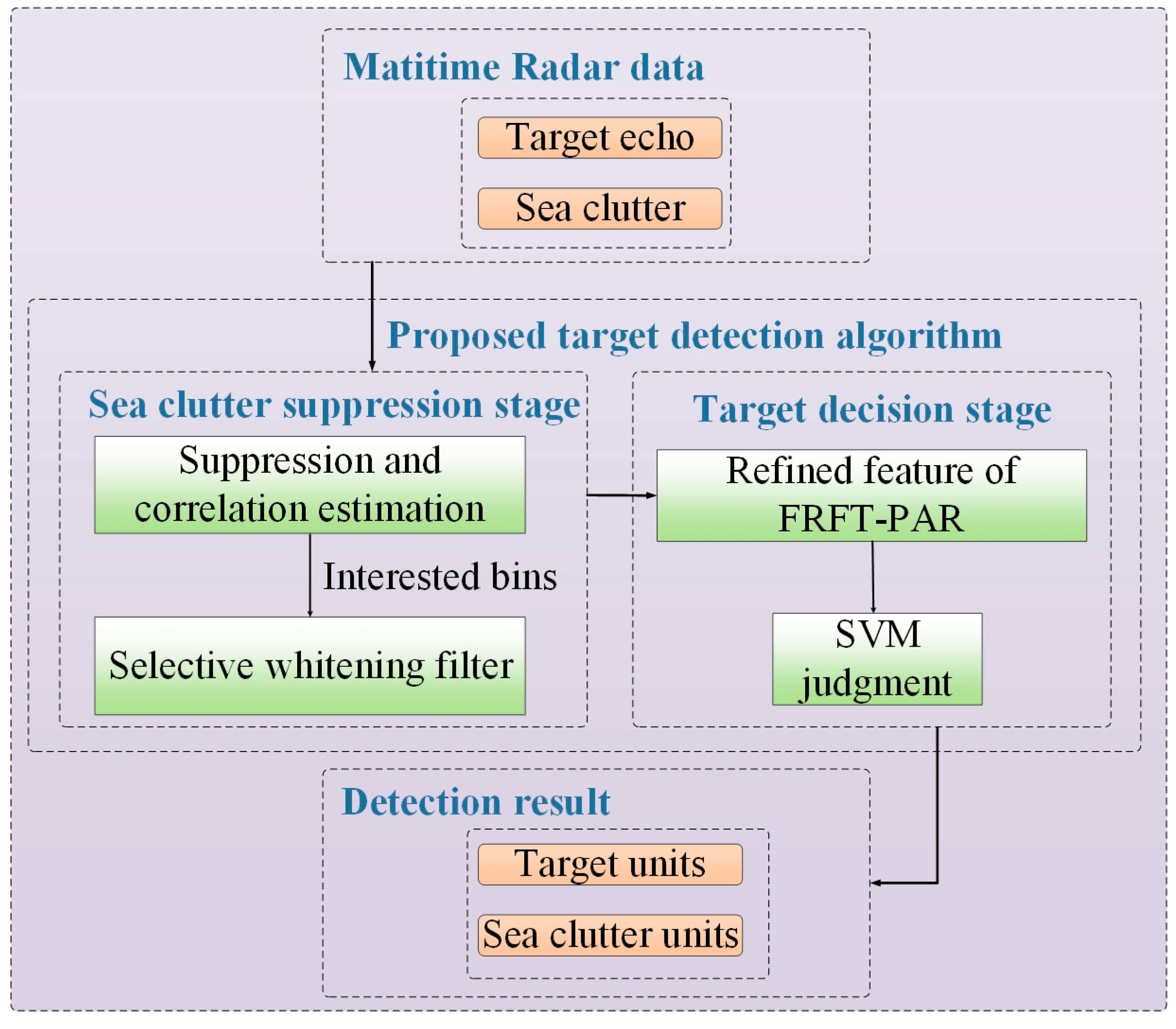
2. Material and Methods
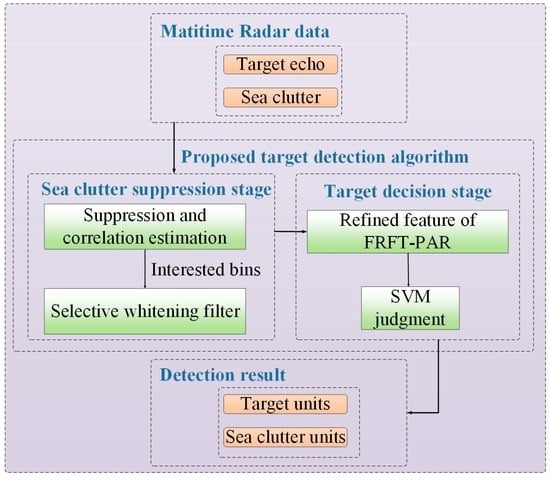
2.1. Sea Clutter Suppression Stage
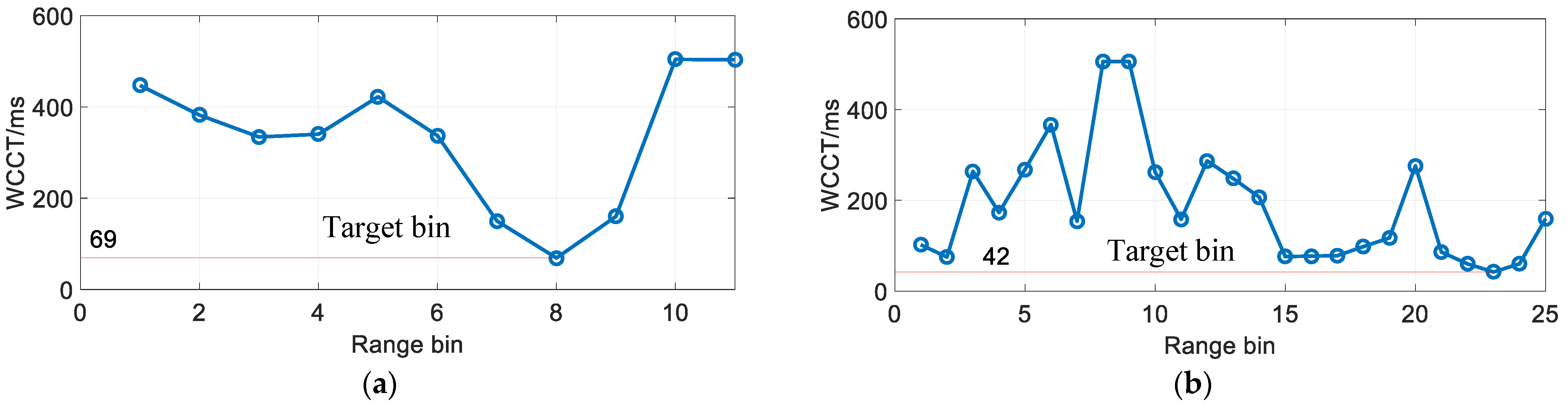
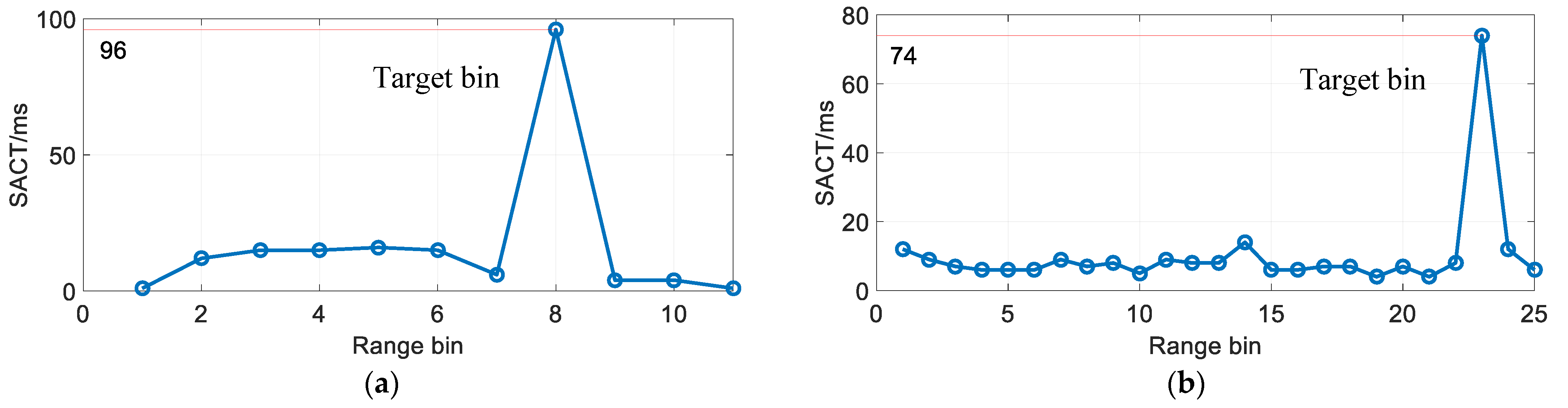
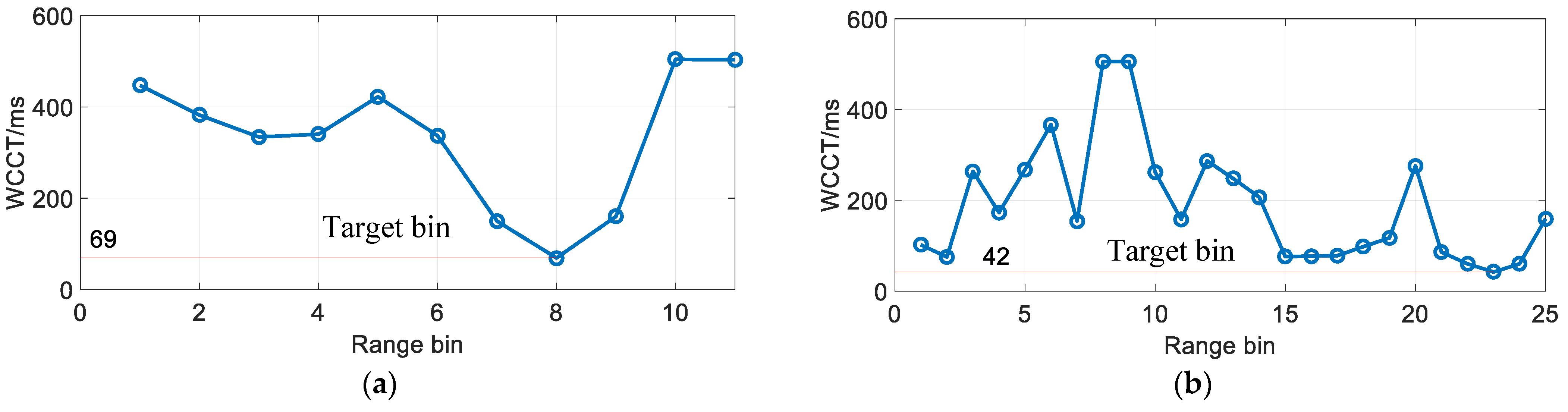
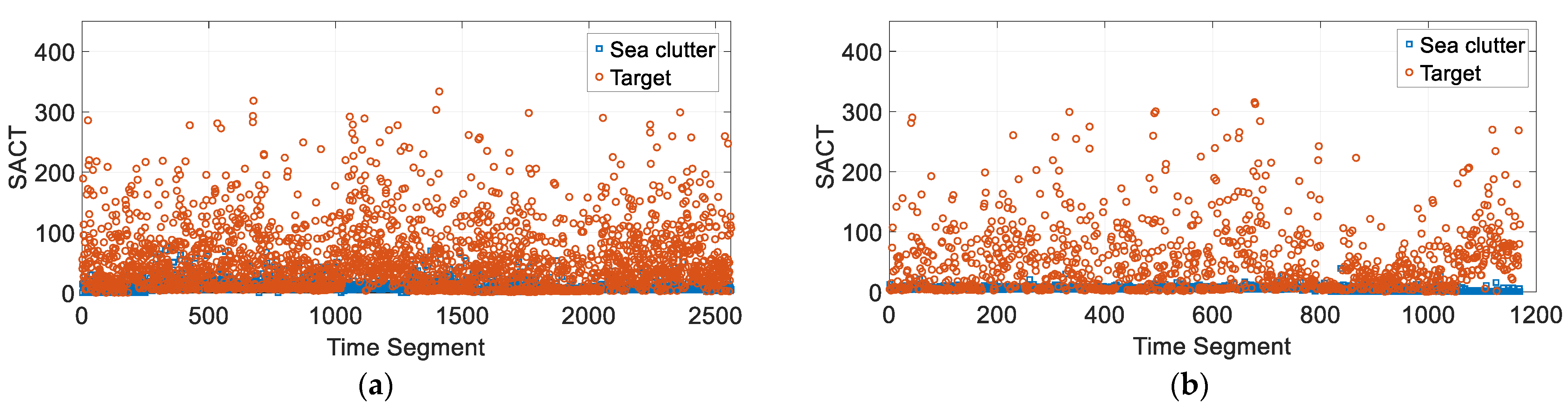
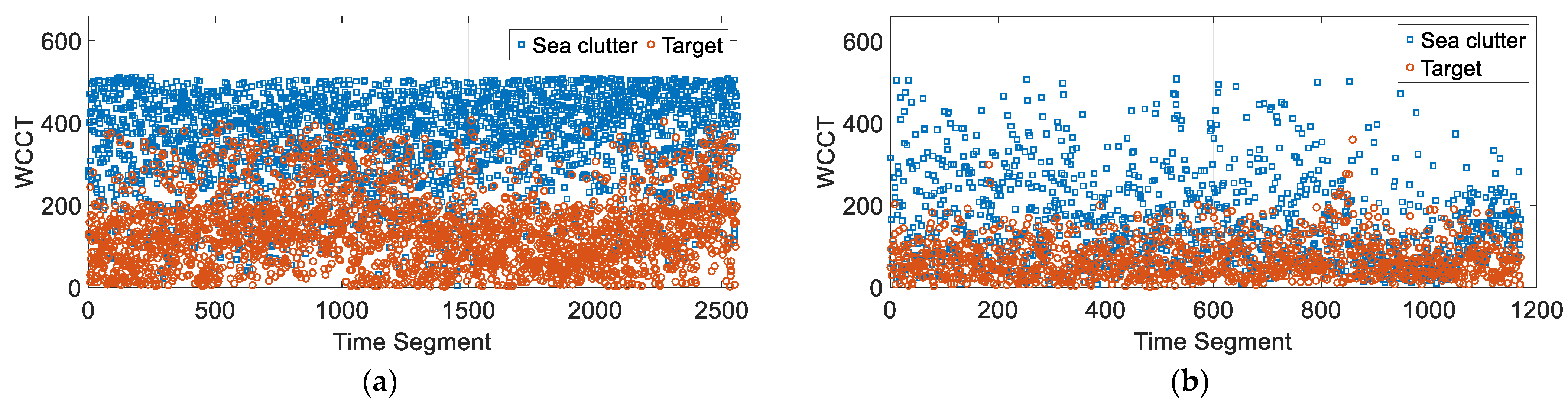
2.1.1. Correlation Time of Sea Clutter in Time and Space Domains
2.1.2. Sea Clutter Suppression Method Based on Correlation Time Estimation
- (1)
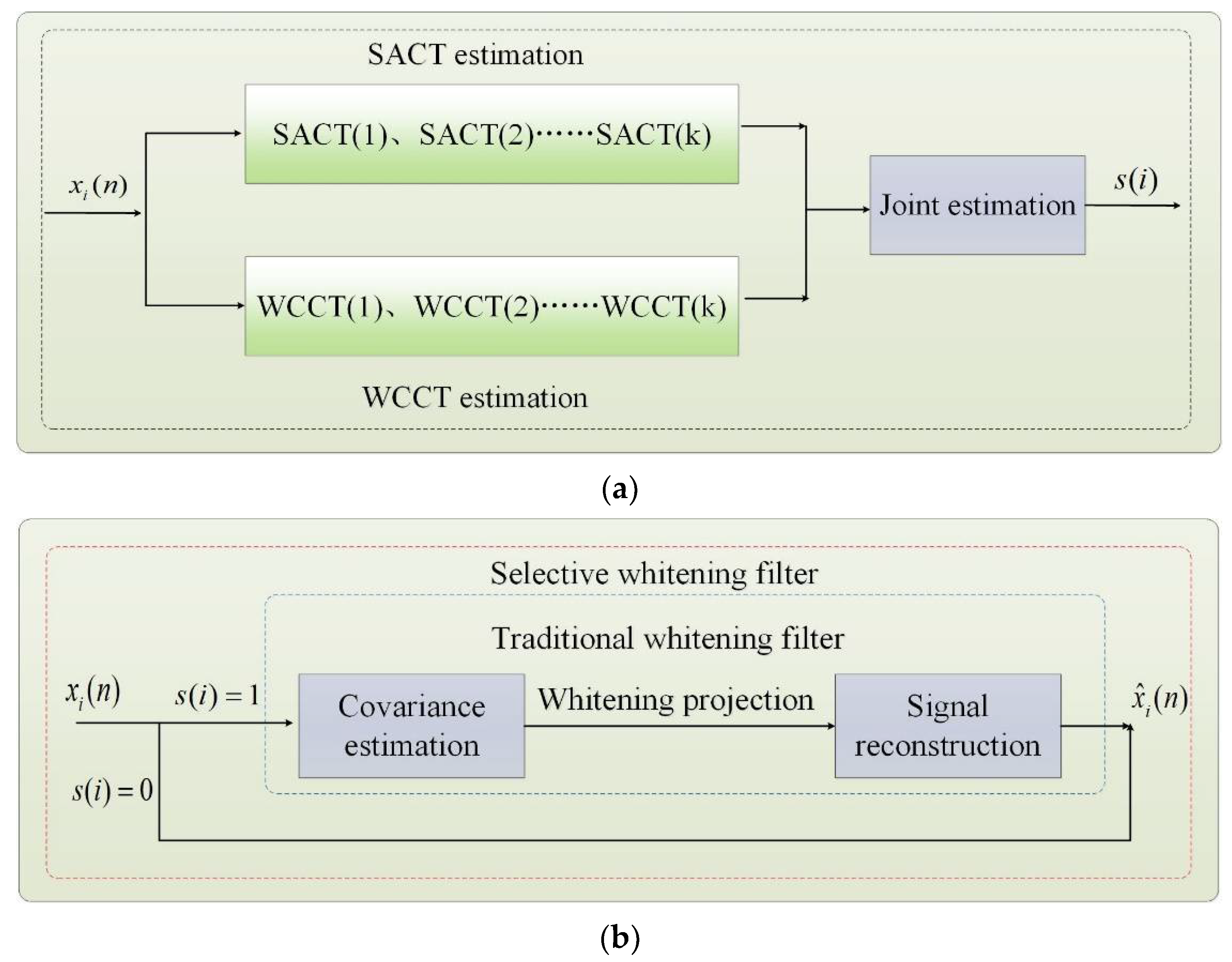
- Suppose the estimation result of a particular range bin satisfies . In that case, it is regarded that the auto-correlation between the echoes of this range bin is strong, and the cross-correlation between the echoes in the adjacent range bin is weak. It is considered an interested bin.
- (2)
- Suppose the estimation result of a certain range bin satisfies . In that case, it is regarded that the auto-correlation between the echoes of this range bin is weak, or the cross-correlation between the echoes in the adjacent range bin is strong. It is considered a sea clutter bin.
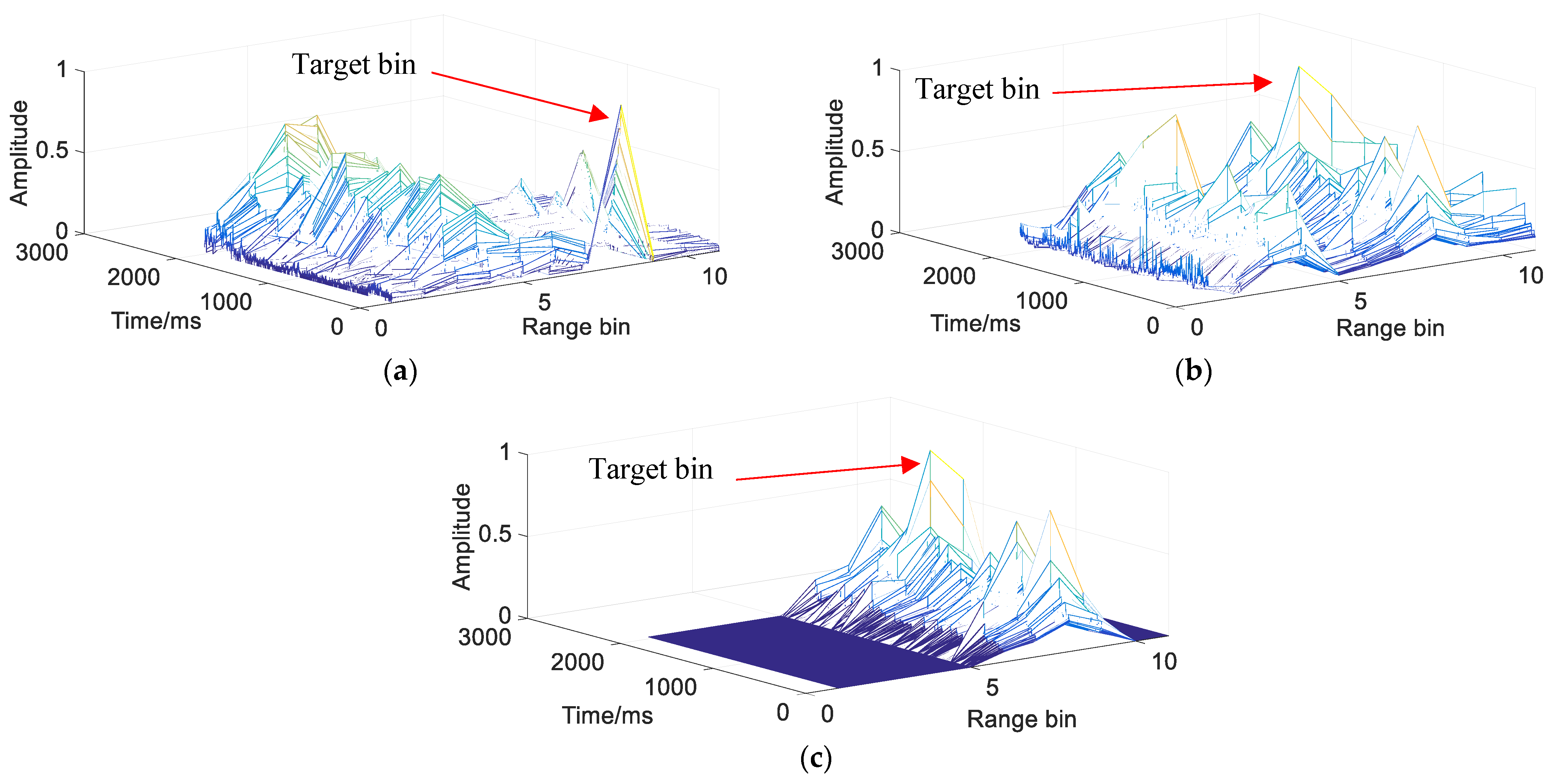
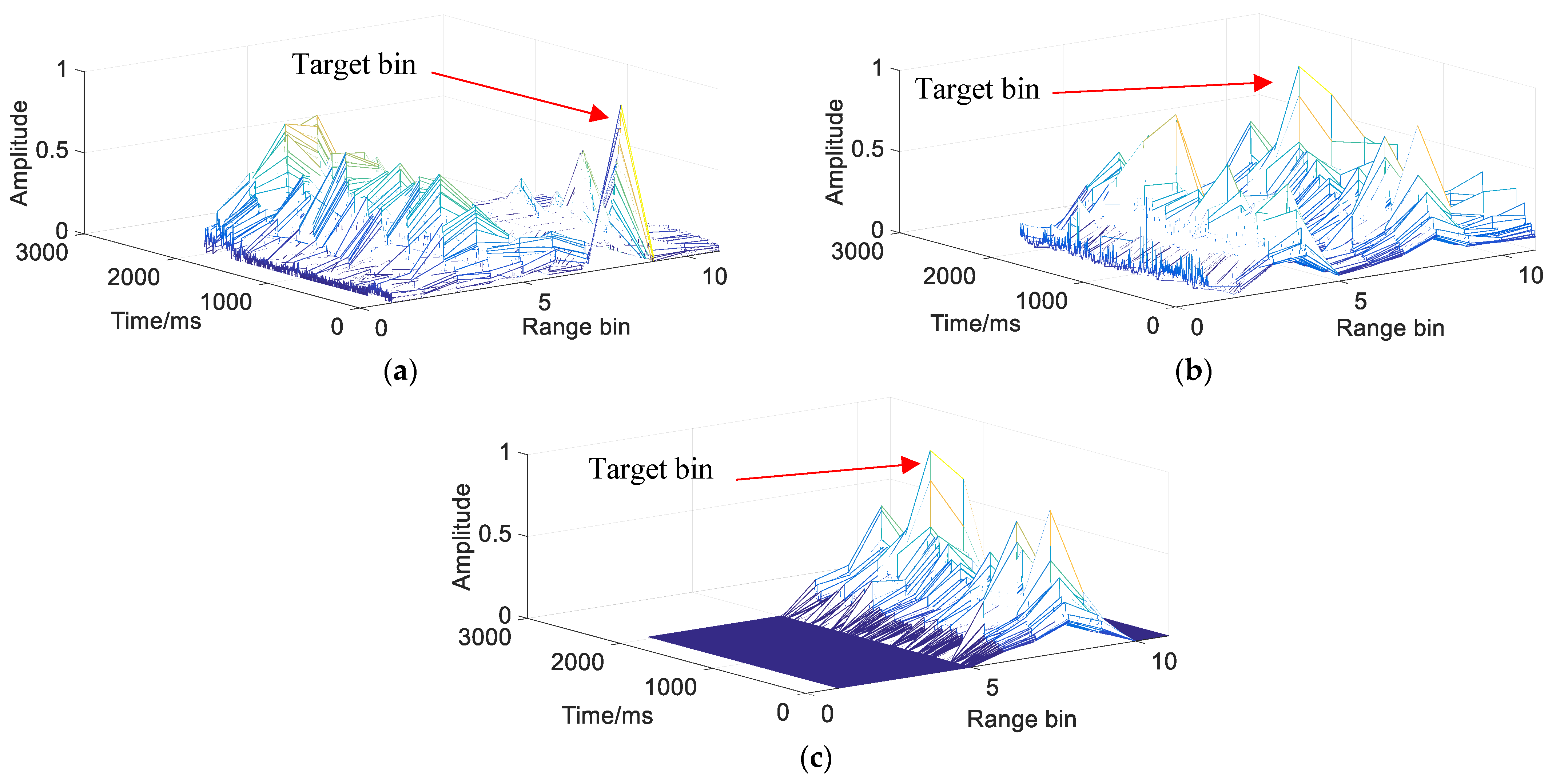
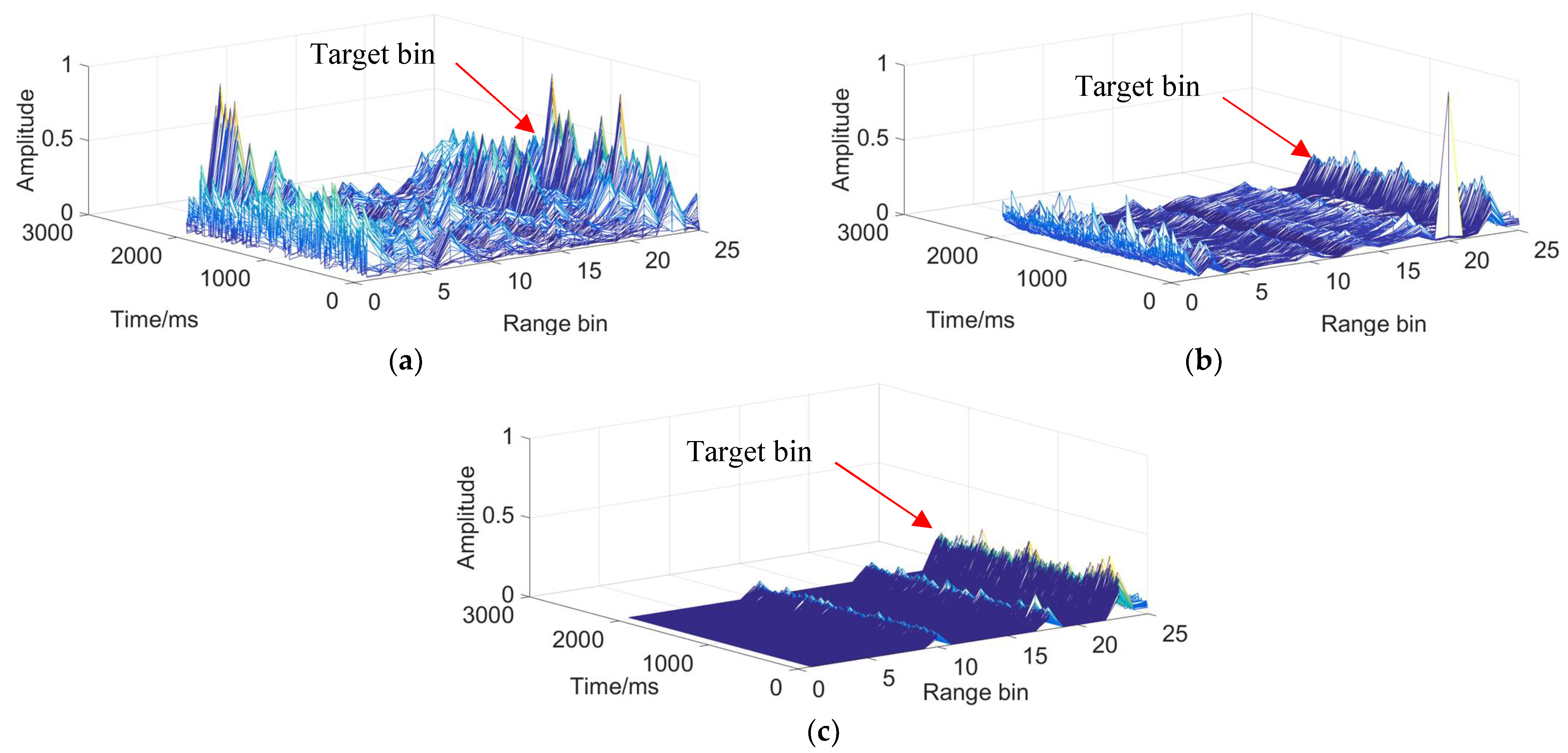
2.1.3. Selective Whitening Filter Based on Correlation Estimation
2.2. Target Decision Stage
3. Results
3.1. Dataset Description
3.2. Comparison with the Existing Algorithms
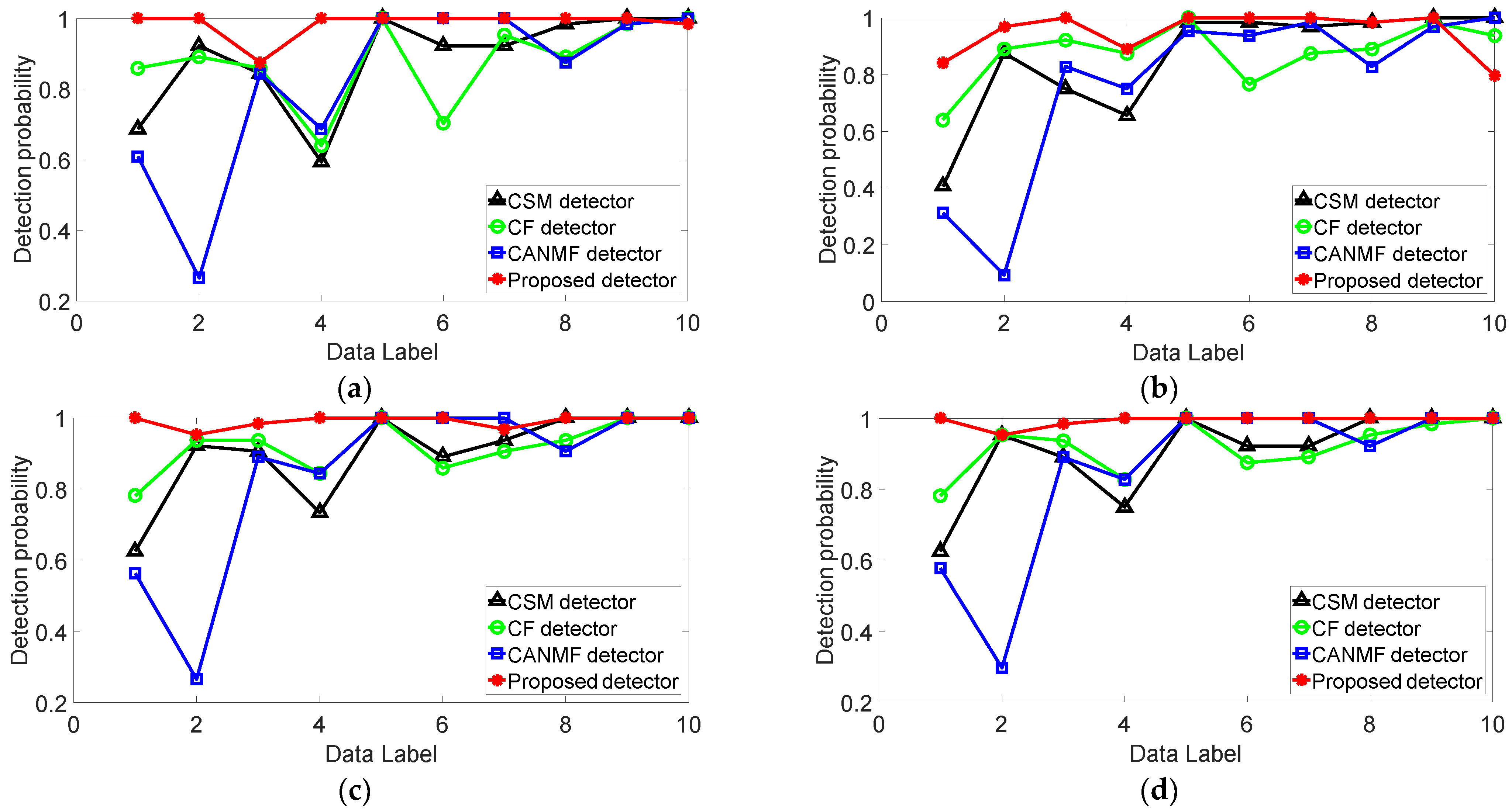
3.2.1. Detection Results on IPIX-1993 Dataset
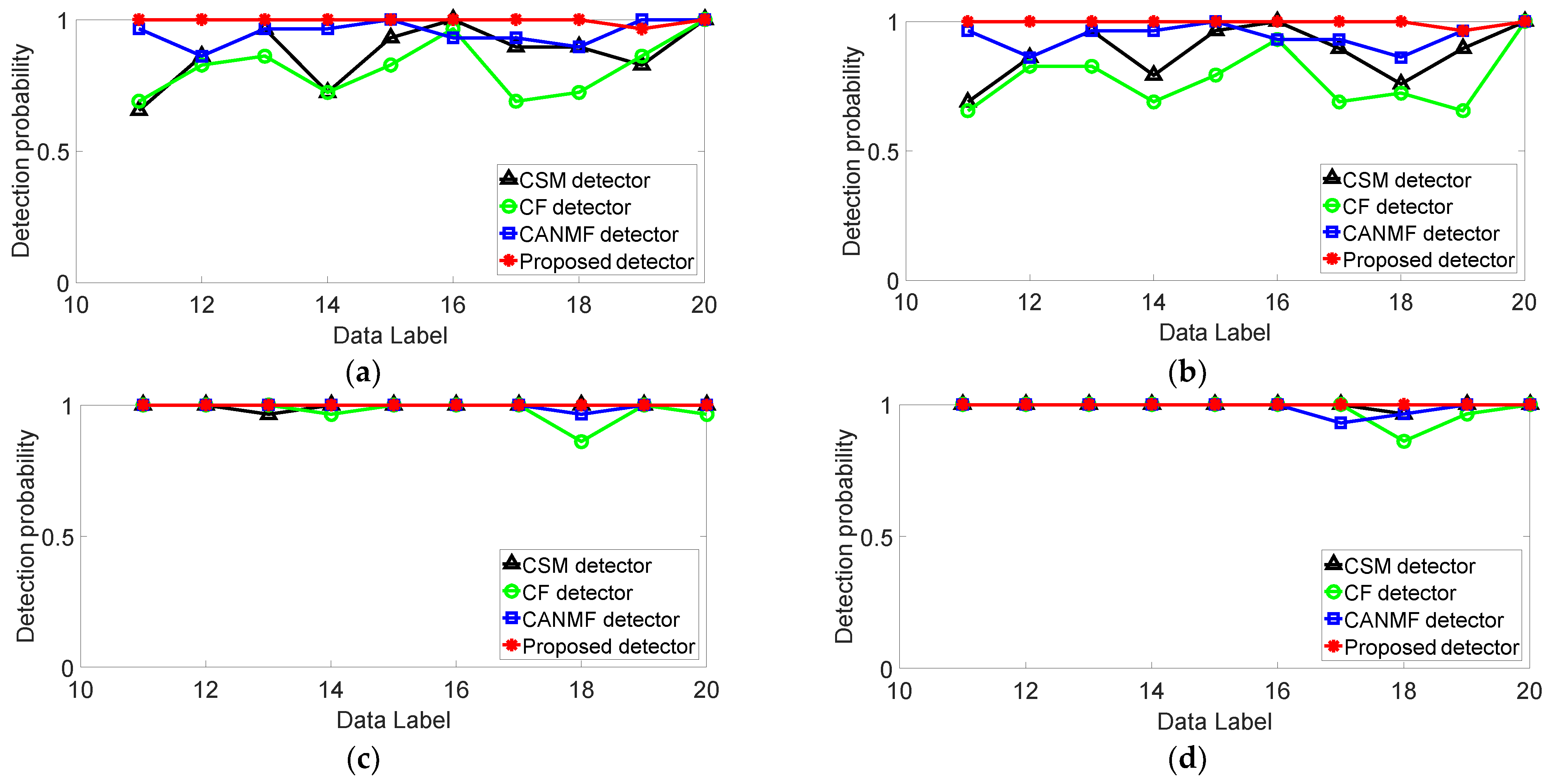
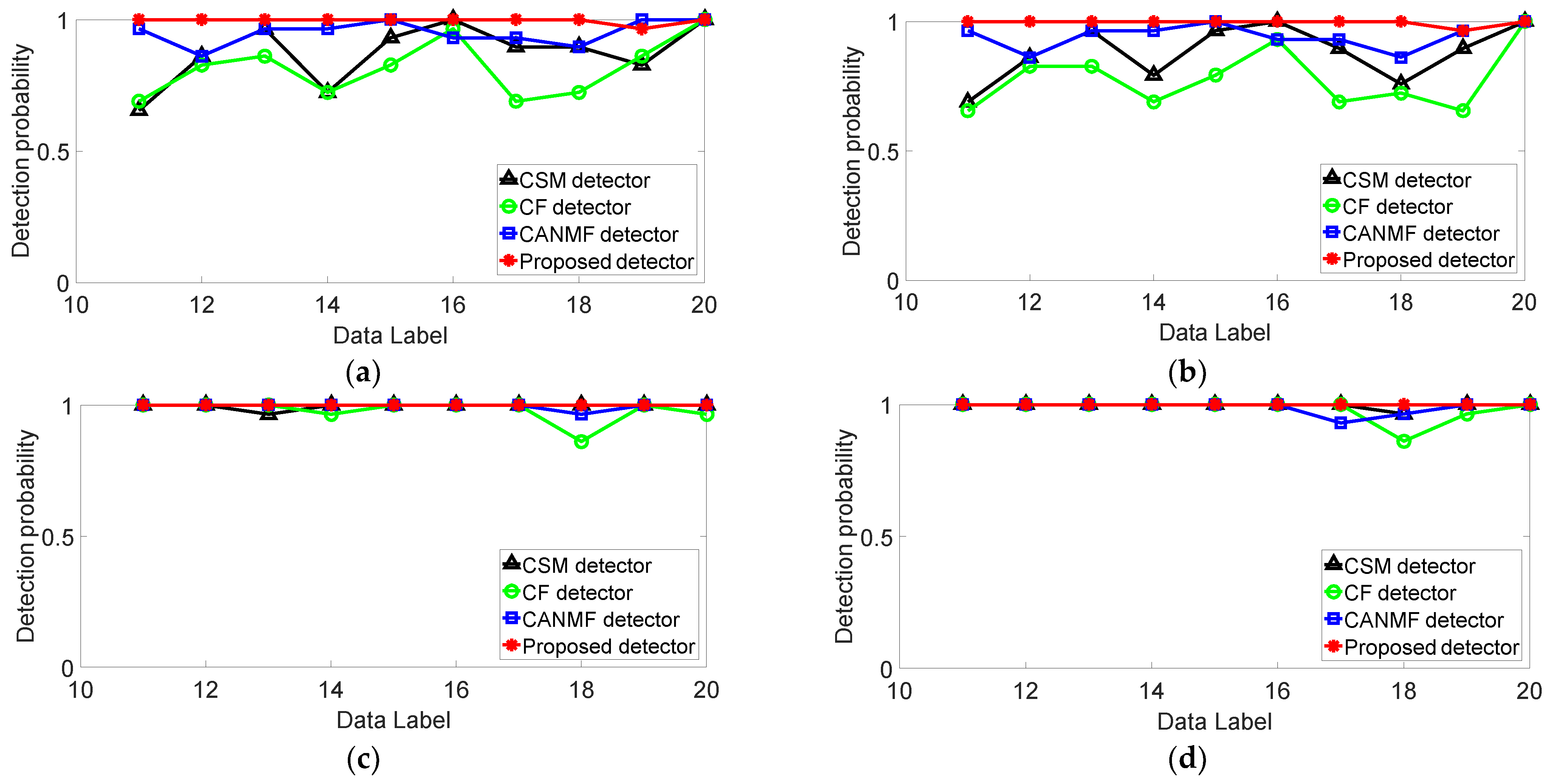
3.2.2. Detection Results on IPIX-1998 Dataset
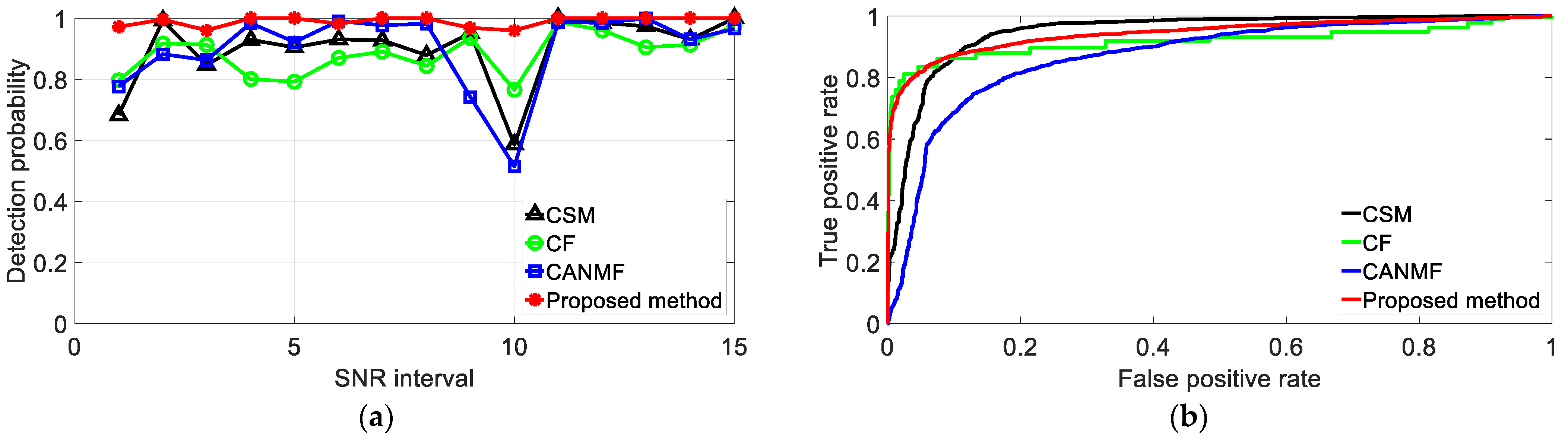
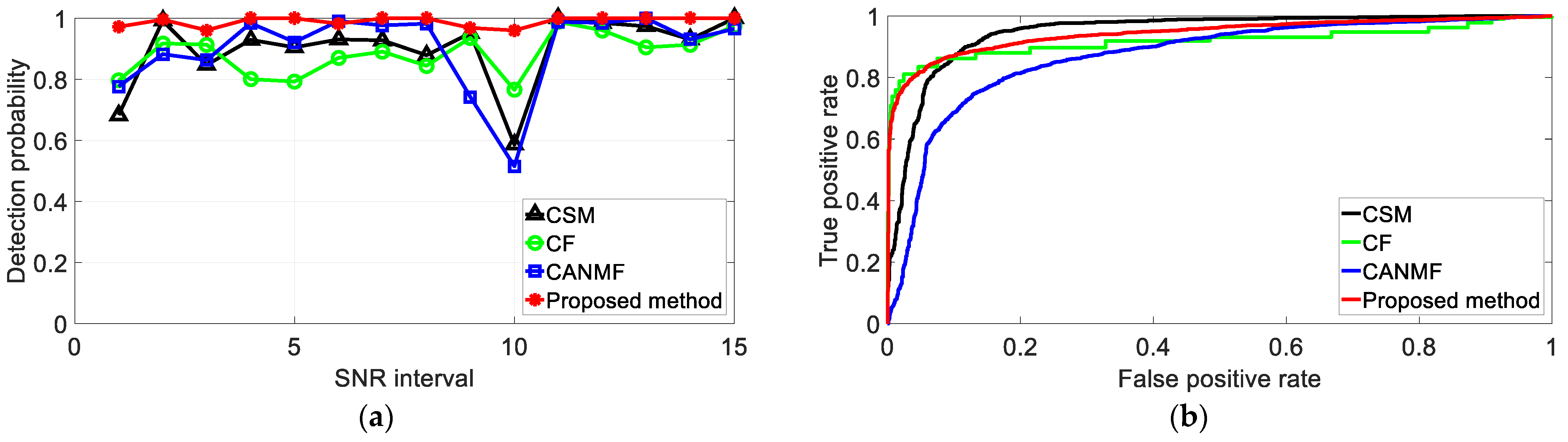
3.3. Comprehensive Experimental Results
4. Discussion
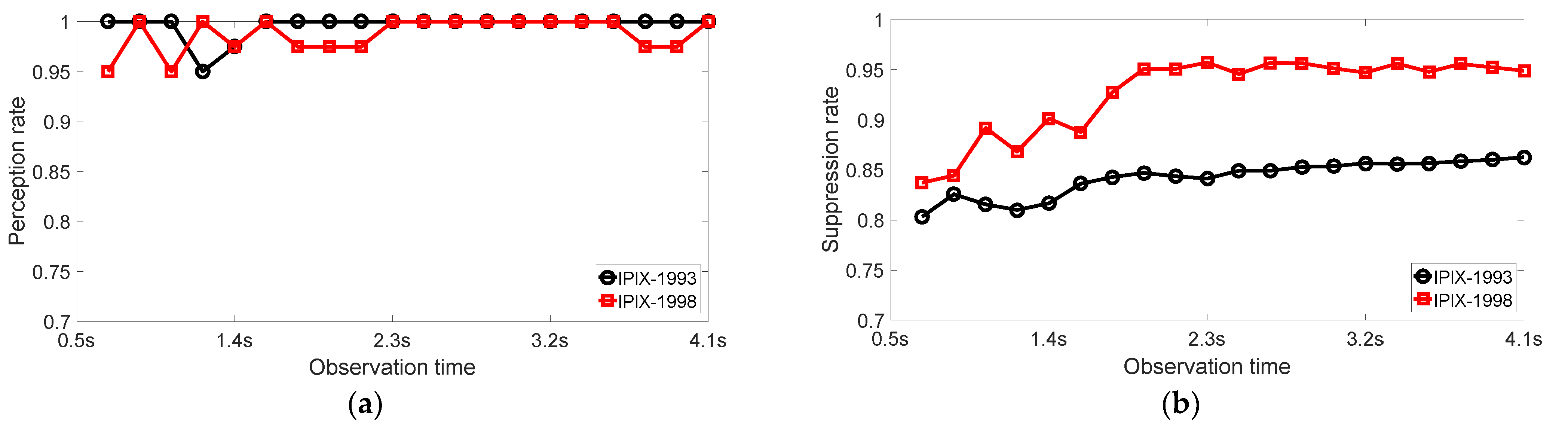
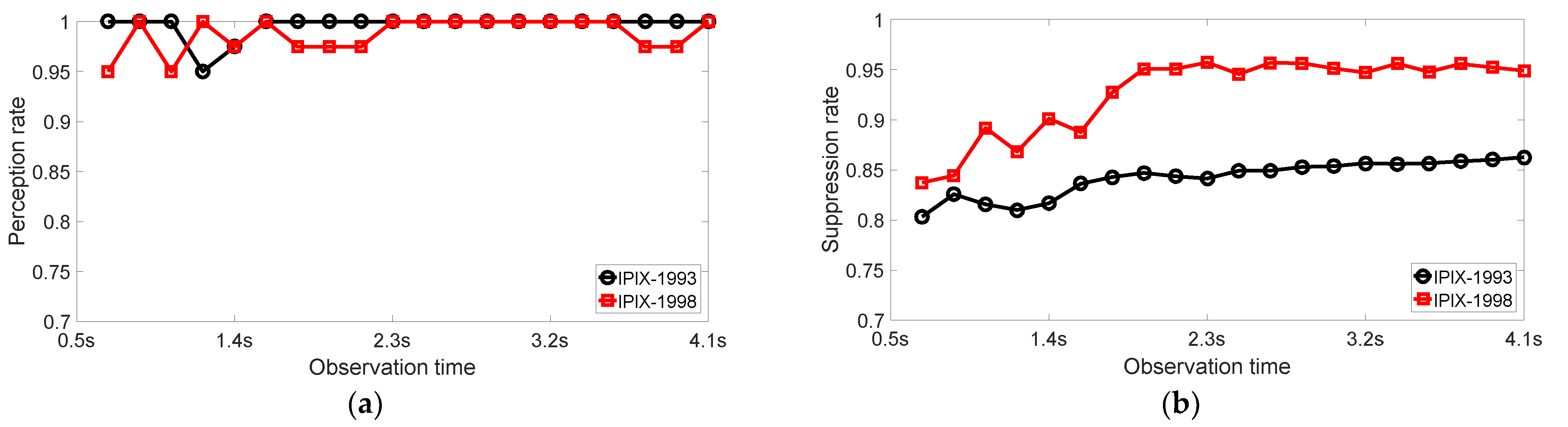
4.1. Validation of the Sea Clutter Suppression Method
4.2. Validation of the Sea Clutter Suppression Stage
4.3. Comparison of the Computational Complexity
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ma, L.; Wu, J.; Zhang, J.; Wu, Z.; Jeon, G.; Tian, M.; Zhang, Y. Sea Clutter Amplitude Prediction Using a Long Short-Term Memory Neural Network. Remote Sens. 2020, 11, 2826. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Xu, S.; Tang, S. CFAR Strategy Formulation and Evaluation Based on Fox’s H-function in Positive Alpha-Stable Sea Clutter. Remote Sens. 2020, 12, 1273. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Tang, J.; Zhou, H.; Xu, X.; Tian, Y.; Wen, B. Joint Ship Detection Based on Time-Frequency Domain and CFAR Methods with HF Radar. Remote Sens. 2021, 13, 1548. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Mu, X.; Wang, Z.; Liu, N.; Wang, G. Multi-Dimensional Automatic Detection of Scanning Radar Images of Marine Targets Based on Radar PPInet. Remote Sens. 2021, 13, 3856. [Google Scholar] [CrossRef]
- Yan, H.; Chen, C.; Jin, G.D.; Zhang, J.; Wang, X.; Zhu, D. Implementation of a Modified Faster R-CNN for Target Detection Technology of Coastal Defense Radar. Remote Sens. 2021, 13, 1703. [Google Scholar] [CrossRef]
- Fang, X.; Cao, Z.; Min, R.; Pi, Y. Radar Maneuvering Target Detection Based on Two Steps Scaling and Fractional Fourier Transform. Signal Process. 2019, 155, 1–13. [Google Scholar]
- Chen, X.; Guan, J.; Yu, X.; He, Y. Radar Micro-Doppler Signature Extraction and Detection Via Short-Time Sparse Time-Frequency Distribution. J. Electron. Inf. Technol. 2017, 39, 1017–1023. [Google Scholar]
- Chen, X.; Guan, J.; Bao, Z.; He, Y. Detection and Extraction of Target with Micromotion in Spiky Sea Clutter via Short-Time Fractional Fourier Transform. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1002–1018. [Google Scholar] [CrossRef]
- Liu, S.; Shan, T.; Tao, R.; Zhang, Y.; Zhang, G.; Zhang, F.; Wang, Y. Sparse Discrete Fractional Fourier Transform and Its Applications. IEEE Trans. Signal Process. 2014, 62, 6582–6595. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Yu, J.; Peng, Y.; Xia, X. Radon-Fourier Transform for Radar Target Detection, I: Generalized Doppler Filter Bank. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1186–1202. [Google Scholar] [CrossRef]
- Xu, J.; Zhou, X.; Qian, L.; Xia, X.; Long, T. Hybrid Integration for Highly Maneuvering Radar Target Detection Based on Generalized Radon-Fourier Transform. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2554–2561. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Liu, N.; He, Y. Maneuvering Target Detection via Radon-Fractional Fourier Transform-Based Long-Time Coherent Integration. IEEE Trans. Signal Process. 2014, 62, 939–953. [Google Scholar] [CrossRef]
- Luo, F.; Zhang, D.; Zhang, B. The Fractal Properties of Sea Clutter and Their Applications in Maritime Target Detection. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1295–1299. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Zhu, X. Target Detection in Sea Clutter Based on Multifractal Characteristics after Empirical Mode Decomposition. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1547–1551. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; He, Y.; Zhang, J. Detection of low observable moving target in sea clutter via fractal characteristics in fractional Fourier transform domain. IET Radar 2013, 7, 635–651. [Google Scholar] [CrossRef]
- Kammoun, A.; Couillet, R.; Pascal, F.; Alouini, M. Optimal Design of the Adaptive Normalized Matched Filter Detector Using Regularized Tyler Estimators. IEEE Trans. Aerosp. Electron. Syst. 2015, 52, 755–769. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Jian, T.; Su, F.; Qu, C.; Ping, D. Adaptive Detection Application of Covariance Matrix Estimator for Correlated Non-Gaussian Clutter. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 2108–2117. [Google Scholar] [CrossRef]
- Shui, P.; Li, D.; Xu, S. Tri-Feature-Based Detection of Floating Small Targets in Sea Clutter. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1416–1430. [Google Scholar] [CrossRef]
- Xu, S.; Shui, P.; Yan, X.; Cao, Y. Combined Adaptive Normalized Matched Filter Detection of Moving Target in Sea Clutter. Circuits Syst. Signal Process. 2017, 36, 2360–2383. [Google Scholar] [CrossRef]
- Stankovic, L.; Thayaparan, T.; Dakovic, M. Signal decomposition by using the S-method with application to the analysis of HF radar signals in sea-clutter. IEEE Trans. Signal Process. 2006, 54, 4332–4342. [Google Scholar] [CrossRef]
- Stankovic, L.; Mandic, D.; Dakovic, M.; Brajovic, M. Time-frequency decomposition of multivariate multicomponent signals. Signal Process. 2017, 142, 468–479. [Google Scholar] [CrossRef]
- Zuo, L.; Li, M.; Zhang, X.; Zhang, P.; Wu, Y. CFAR Detection of Range-Spread Targets Based on the Time-Frequency Decomposition Feature of Two Adjacent Returned Signals. IEEE Trans. Signal Process. 2013, 61, 6307–6319. [Google Scholar] [CrossRef]
- Lee, M.; Kim, J.; Ryu, B.; Kim, K.T. Robust Maritime Target Detector in Short Dwell Time. Remote Sens. 2021, 13, 1319. [Google Scholar] [CrossRef]
- Shi, S.; Shui, P. Sea-Surface Floating Small Target Detection by One-Class Classifier in Time-Frequency Feature Space. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6395–6411. [Google Scholar] [CrossRef]
- Liu, H.; Song, J.; Xiong, W.; Cui, Y.; Lv, Y.; Liu, J. Analysis of Amplitude Statistical and Correlation Characteristics of High Grazing Angle Sea-Clutter. J. Eng.-Joe 2019, 2019, 6829–6833. [Google Scholar] [CrossRef]
- Xiong, G.; Xi, C.; Li, D.; Yu, W. Cross Correlation Singularity Power Spectrum Theory and Application in Radar Target Detection within Sea Clutters. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3753–3766. [Google Scholar] [CrossRef]
- Choi, S.; Yang, H.; Song, J.; Jeon, H.; Chung, Y. Sea Clutter Covariance Matrix Estimation and Its Application to Whitening Filter. J. Electromagn. Eng. Sci. 2021, 21, 134–142. [Google Scholar] [CrossRef]
- De Miao, A.; Pallotta, L.; Li, J.; Stoica, P. Loading Factor Estimation Under Affine Constraints on the Covariance Eigenvalues With Application to Radar Target Detection. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1269–1283. [Google Scholar] [CrossRef]
- Conte, E.; De Miao, A.; Li, J. Mitigation Techniques for Non-Gaussian Sea Clutter. IEEE J. Ocean. Eng. 2004, 29, 284–302. [Google Scholar] [CrossRef]
- Greco, M.; Stinco, P.; Gini, F.; Rangaswamy, M. Impact of Sea Clutter Nonstationarity on Disturbance Covariance Matrix Estimation and CFAR Detector Performance. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1502–1513. [Google Scholar] [CrossRef]
- Li, Y.; Xie, P.; Tang, Z.; Jiang, T.; Qi, P. SVM-Based Sea-Surface Small Target Detection: A False-Alarm-Rate-Controllable Approach. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1225–1229. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | File Name |
WS (km/h) |
SWH (m) |
Angle (Degree) | Primary |
|---|---|---|---|---|---|
| 1 | 19931107_135603_starea17 | 9 | 2.2 | 9 | 8 |
| 2 | 19931107_145028_starea19 | - | - | - | 5 |
| 3 | 19931108_220902_starea26 | 9 | 1.1 | 97 | 6 |
| 4 | 19931109_191449_starea30 | 19 | 0.9 | 98 | 6 |
| 5 | 19931111_163625_starea54 | 20 | 0.7 | 8 | 7 |
| 6 | 19931118_023604_stareC0000280 | 10 | 1.6 | 130 | 7 |
| 7 | 19931118_035737_stareC0000283 | - | - | - | 8 |
| 8 | 19931118_162155_stareC0000310 | 33 | 0.9 | 30 | 6 |
| 9 | 19931118_162658_stareC0000311 | 33 | 0.9 | 40 | 6 |
| 10 | 19931118_174259_stareC0000320 | 28 | 0.9 | 30 | 6 |
| 11 | 19980204_163113_ANTSTEP6 | - | - | 165 | 23 |
| 12 | 19980204_202225_ANTSTEP21 | - | - | 165 | 23 |
| 13 | 19980204_202525_ANTSTEP22 | - | - | 180 | 6 |
| 14 | 19980205_171437_ANTSTEP41 | - | - | 180 | 6 |
| 15 | 19980205_180558_ANTSTEP46 | - | - | 180 | 6 |
| 16 | 19980212_195704_ANTSTEP65 | - | - | 180 | 6 |
| 17 | 19980223_164055_ANTSTEP82 | - | - | 165 | 30 |
| 18 | 19980223_173317_ANTSTEP91 | - | - | 165 | 31 |
| 19 | 19980223_173950_ANTSTEP92 | - | - | 165 | 28 |
| 20 | 19980304_184537_ANTSTEP204 | - | - | - | 21 |
| Interval Number | SNR Interval/dB | Data Label | Interval Number | SNR Interval/dB | Data Label |
|---|---|---|---|---|---|
| 1 | [−1, 2.02] | 4 | 9 | [11.3, 11.9] | 2, 7, 10 |
| 2 | [2.54, 3.05] | 8 | 10 | [11.9, 12.4] | 1 |
| 3 | [5.12, 5.64] | 3 | 11 | [12.4, 12.9] | 9 |
| 4 | [5.64, 6.16] | 6 | 12 | [14.4, 15] | 5, 13 |
| 5 | [6.68, 7.19] | 18 | 13 | [15, 15.5] | 15 |
| 6 | [7.19, 7.71] | 19 | 14 | [16, 16.5] | 12 |
| 7 | [9.26, 9.78] | 11, 17, 20 | 15 | [16.5, 17] | 16 |
| 8 | [10.3, 10.8] | 14 |
| Observation Time(s) | 0.512 s | 1.024 s | ||||||
| Polarizations | HH | HV | VH | VV | HH | HV | VH | VV |
| CSM detector | 0.743 | 0.726 | 0.819 | 0.837 | 0.793 | 0.779 | 0.846 | 0.861 |
| CF detector | 0.672 | 0.604 | 0.840 | 0.854 | 0.762 | 0.700 | 0.891 | 0.906 |
| CANMF detector | 0.843 | 0.784 | 0.894 | 0.884 | 0.873 | 0.820 | 0.907 | 0.905 |
| Proposed detector | 0.940 | 0.807 | 0.990 | 1.000 | 0.834 | 0.894 | 0.986 | 0.989 |
| Observation Time(s) | 2.048 s | 4.096 s | ||||||
| Polarizations | HH | HV | VH | VV | HH | HV | VH | VV |
| CSM detector | 0.855 | 0.866 | 0.881 | 0.900 | 0.929 | 0.904 | 0.896 | 0.903 |
| CF detector | 0.838 | 0.799 | 0.940 | 0.941 | 0.883 | 0.858 | 0.966 | 0.973 |
| CANMF detector | 0.895 | 0.854 | 0.926 | 0.925 | 0.932 | 0.896 | 0.945 | 0.947 |
| Proposed detector | 0.991 | 0.926 | 0.986 | 0.986 | 0.962 | 0.908 | 0.992 | 0.994 |
| Observation Time(s) | 0.512 s | 1.024 s | ||||||
| Polarizations | HH | HV | VH | VV | HH | HV | VH | VV |
| RFT detector | 0.522 | 0.476 | 0.773 | 0.795 | 0.534 | 0.491 | 0.815 | 0.833 |
| FRFT-FD detector | 0.694 | 0.688 | 0.779 | 0.848 | 0.846 | 0.852 | 0.893 | 0.913 |
| FRFT-PAR detector | 0.651 | 0.584 | 0.809 | 0.826 | 0.667 | 0.605 | 0.832 | 0.843 |
| Proposed detector | 0.940 | 0.807 | 0.990 | 1.000 | 0.834 | 0.894 | 0.986 | 0.989 |
| Observation Time(s) | 2.048 s | 4.096 s | ||||||
| Polarizations | HH | HV | VH | VV | HH | HV | VH | VV |
| RFT detector | 0.570 | 0.538 | 0.852 | 0.863 | 0.626 | 0.593 | 0.896 | 0.897 |
| FD detector | 0.489 | 0.413 | 0.623 | 0.591 | 0.232 | 0.156 | 0.278 | 0.245 |
| FRFT-PAR detector | 0.702 | 0.638 | 0.859 | 0.866 | 0.725 | 0.654 | 0.879 | 0.888 |
| Proposed detector | 0.991 | 0.926 | 0.986 | 0.986 | 0.962 | 0.908 | 0.992 | 0.994 |
| Method | Computation Complexity |
|---|---|
| CSM | |
| CF | |
| CANMF | |
| RFT | |
| FD | |
| FRFT-PAR | |
| Proposed method |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Z.; Li, Z.; Zhang, C.; Deng, J.; Qin, T. Low Observable Radar Target Detection Method within Sea Clutter Based on Correlation Estimation. Remote Sens. 2022, 14, 2233. https://doi.org/10.3390/rs14092233
Luo Z, Li Z, Zhang C, Deng J, Qin T. Low Observable Radar Target Detection Method within Sea Clutter Based on Correlation Estimation. Remote Sensing. 2022; 14(9):2233. https://doi.org/10.3390/rs14092233
Chicago/Turabian StyleLuo, Zefeng, Zhengzhou Li, Chao Zhang, Jiaqi Deng, and Tianqi Qin. 2022. "Low Observable Radar Target Detection Method within Sea Clutter Based on Correlation Estimation" Remote Sensing 14, no. 9: 2233. https://doi.org/10.3390/rs14092233
APA StyleLuo, Z., Li, Z., Zhang, C., Deng, J., & Qin, T. (2022). Low Observable Radar Target Detection Method within Sea Clutter Based on Correlation Estimation. Remote Sensing, 14(9), 2233. https://doi.org/10.3390/rs14092233