
Identification of Supercooled Cloud Water by FY-4A Satellite and Validation by CALIPSO and Airborne Detection


Abstract
:
1. Introduction
2. Data
3. Methodology
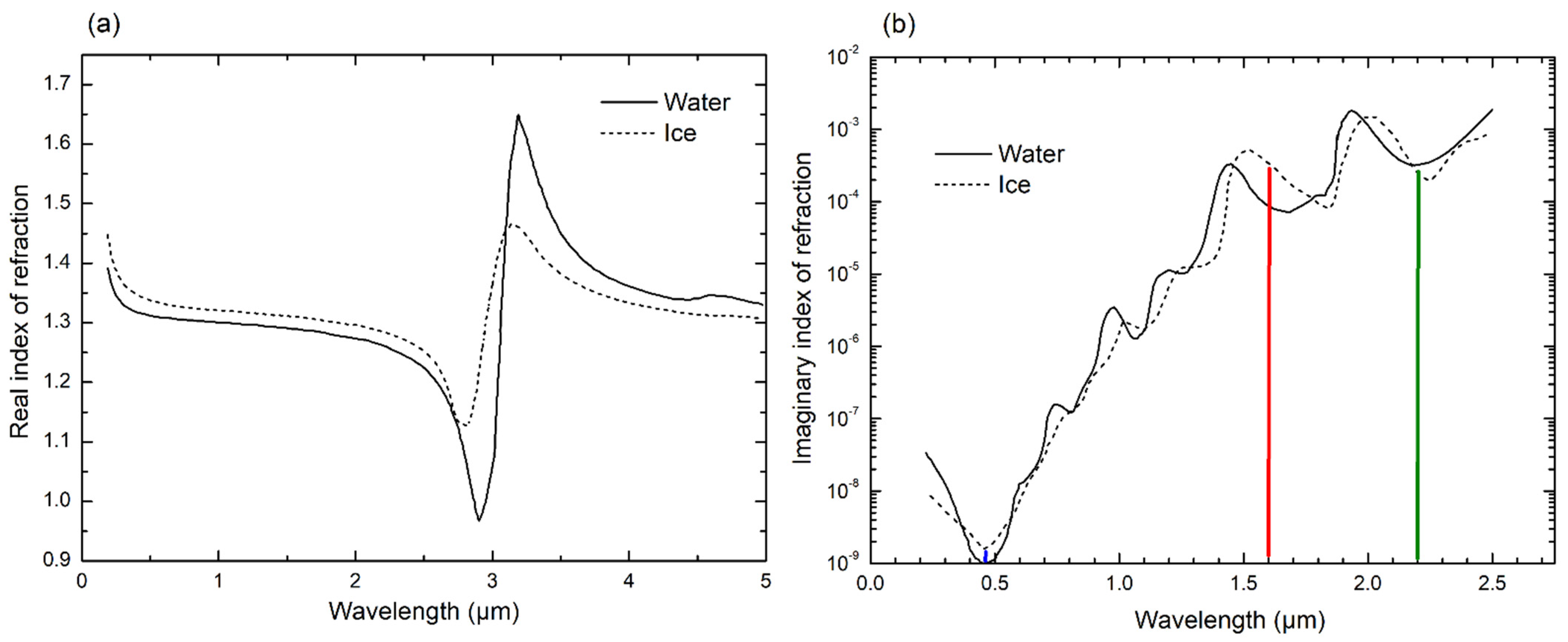
3.1. Multispectral Absorption Characteristics of Ice and Water
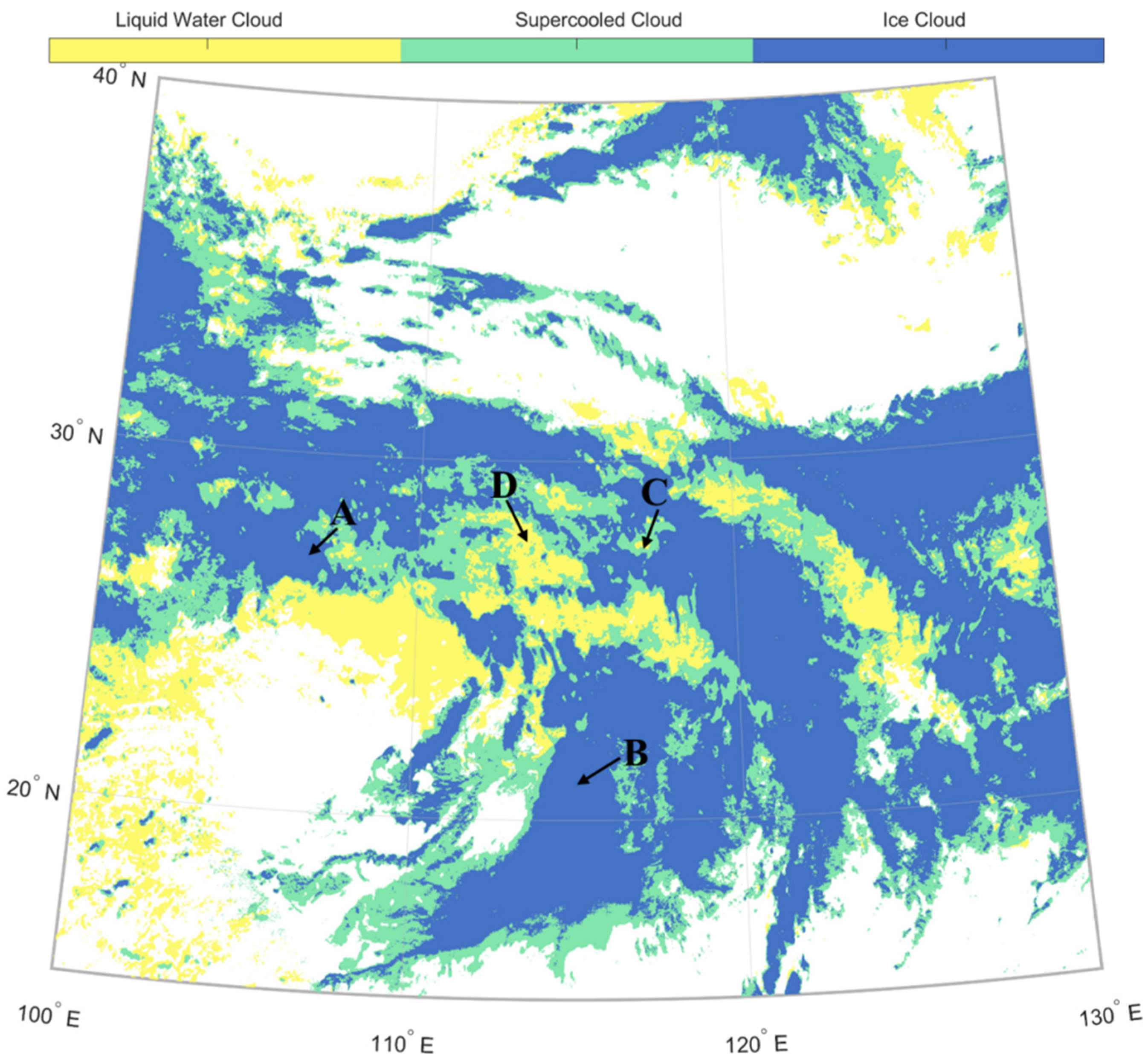
3.2. Multispectral Combined Cloud Phase Color Scheme
3.3. Cloud Phase Classification Based on K-Mean
4. Validation of Satellite-Retrieved Cloud Phase
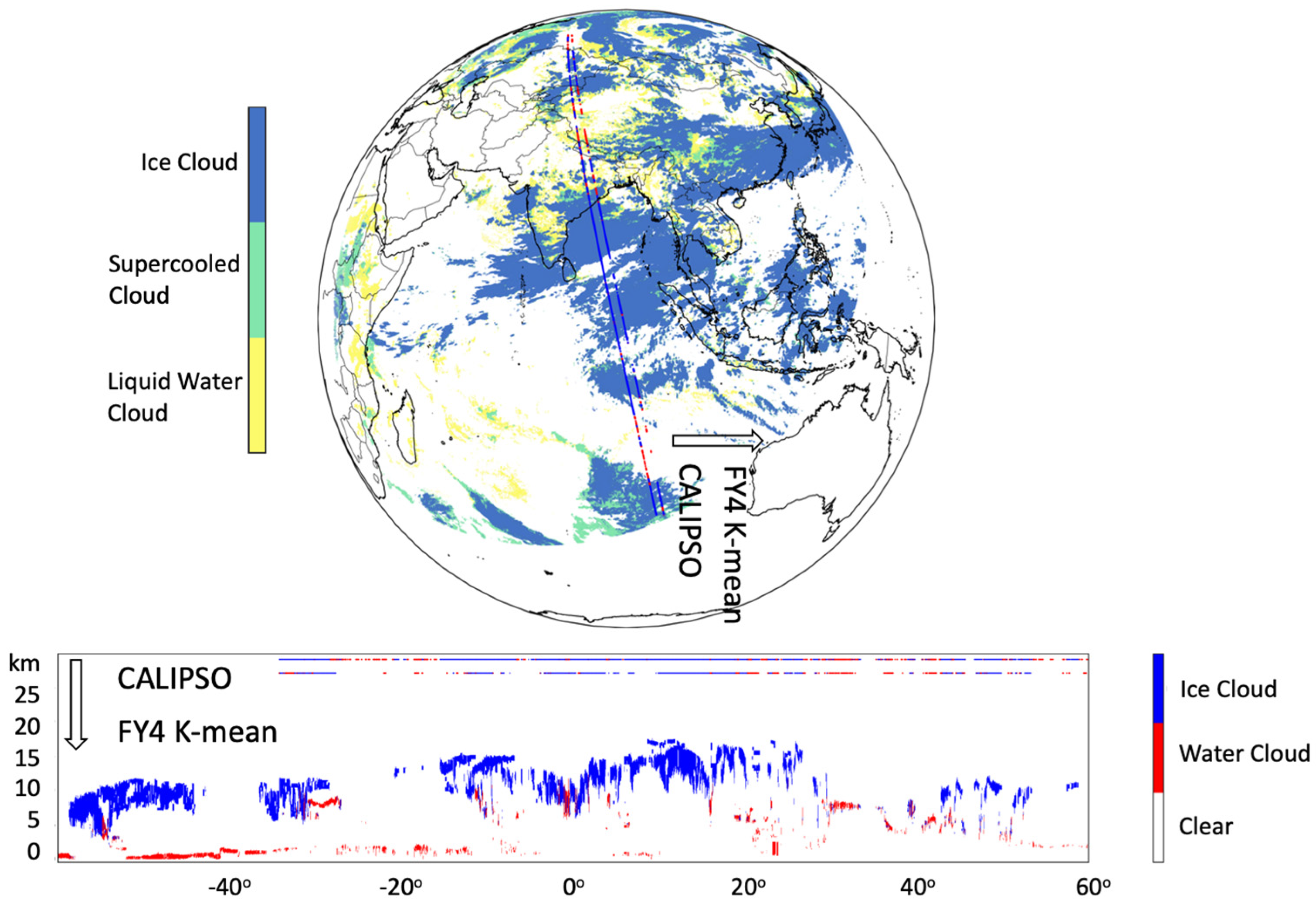
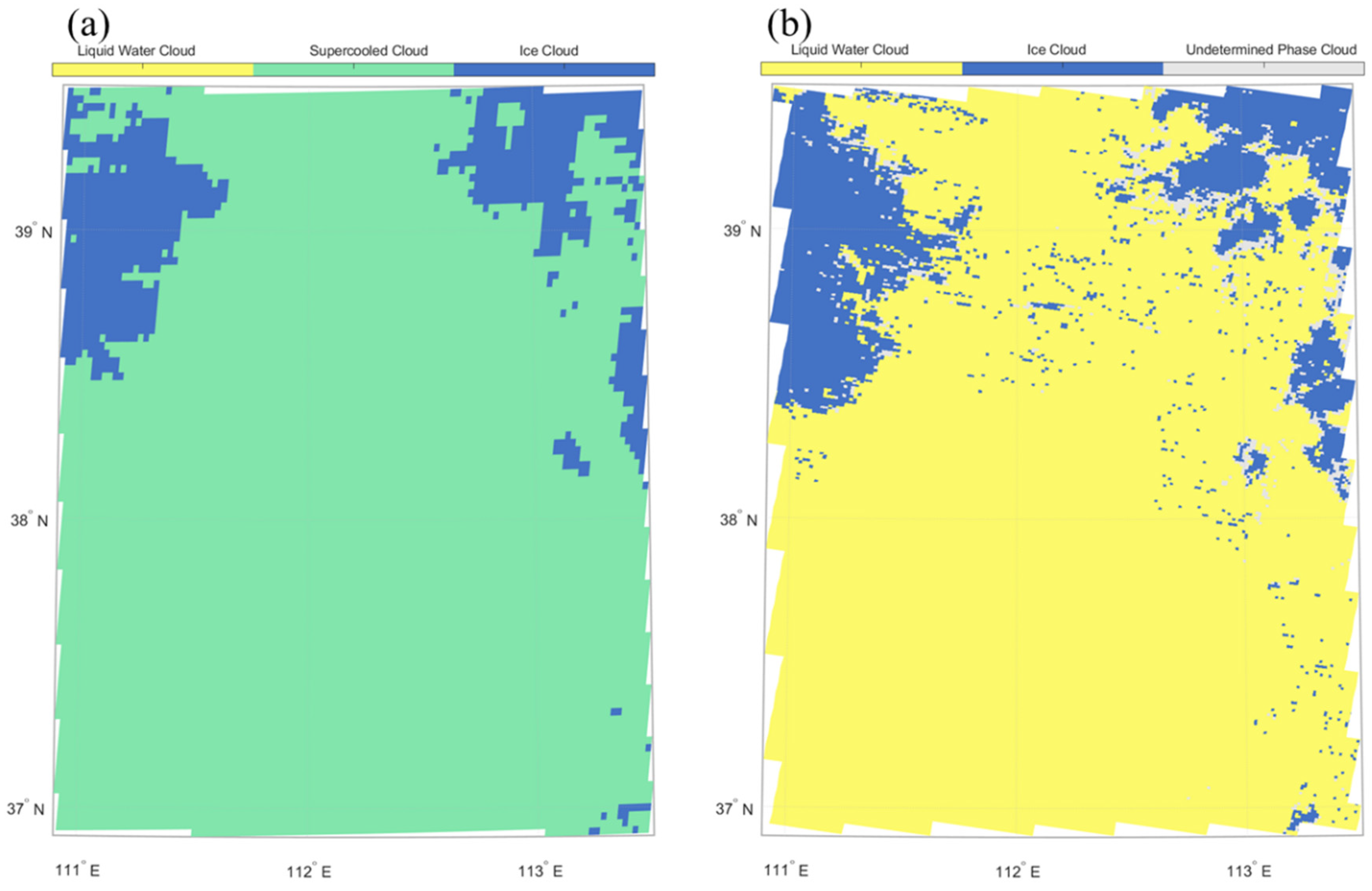
4.1. Validation against CALIPSO VFM Products
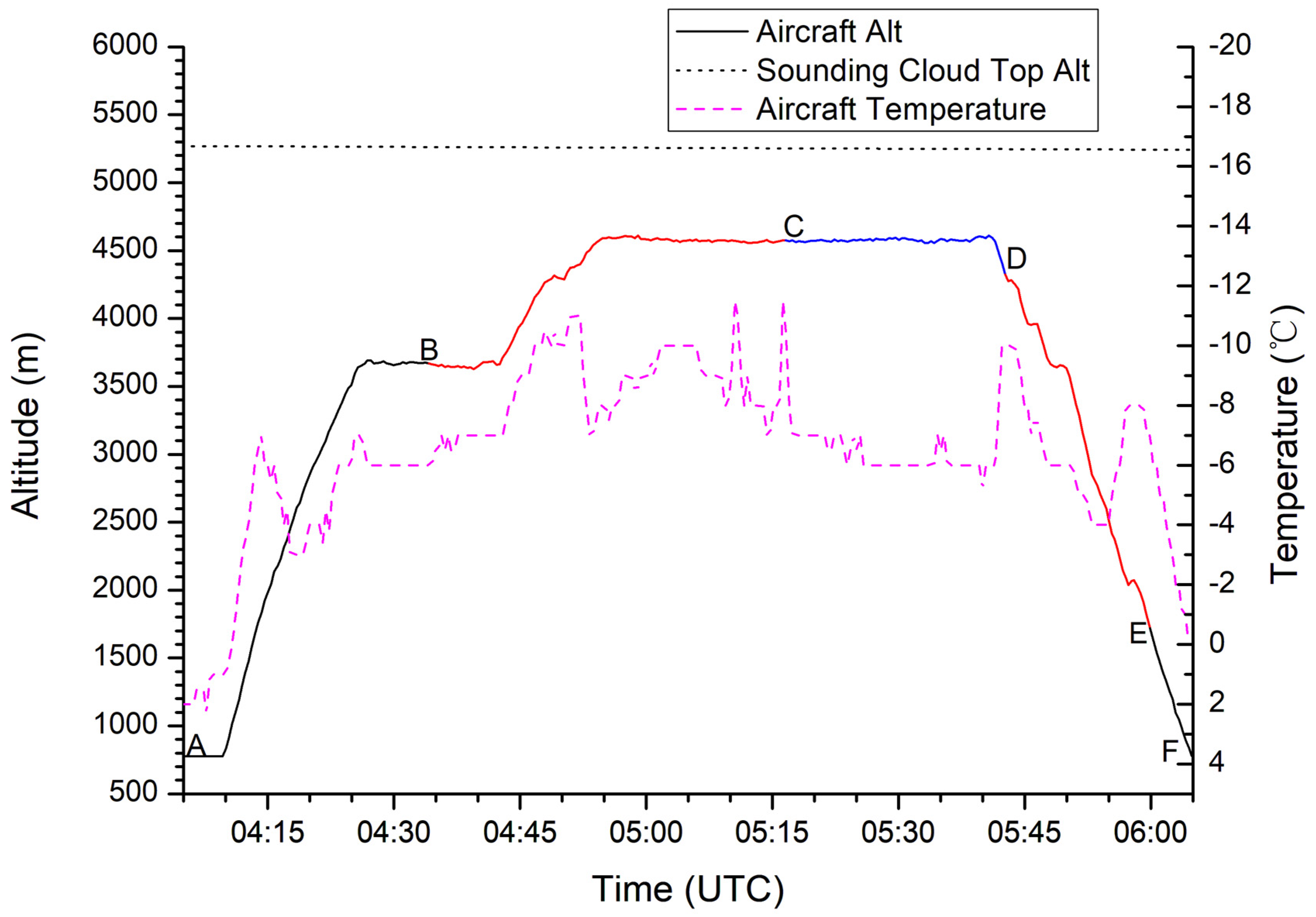
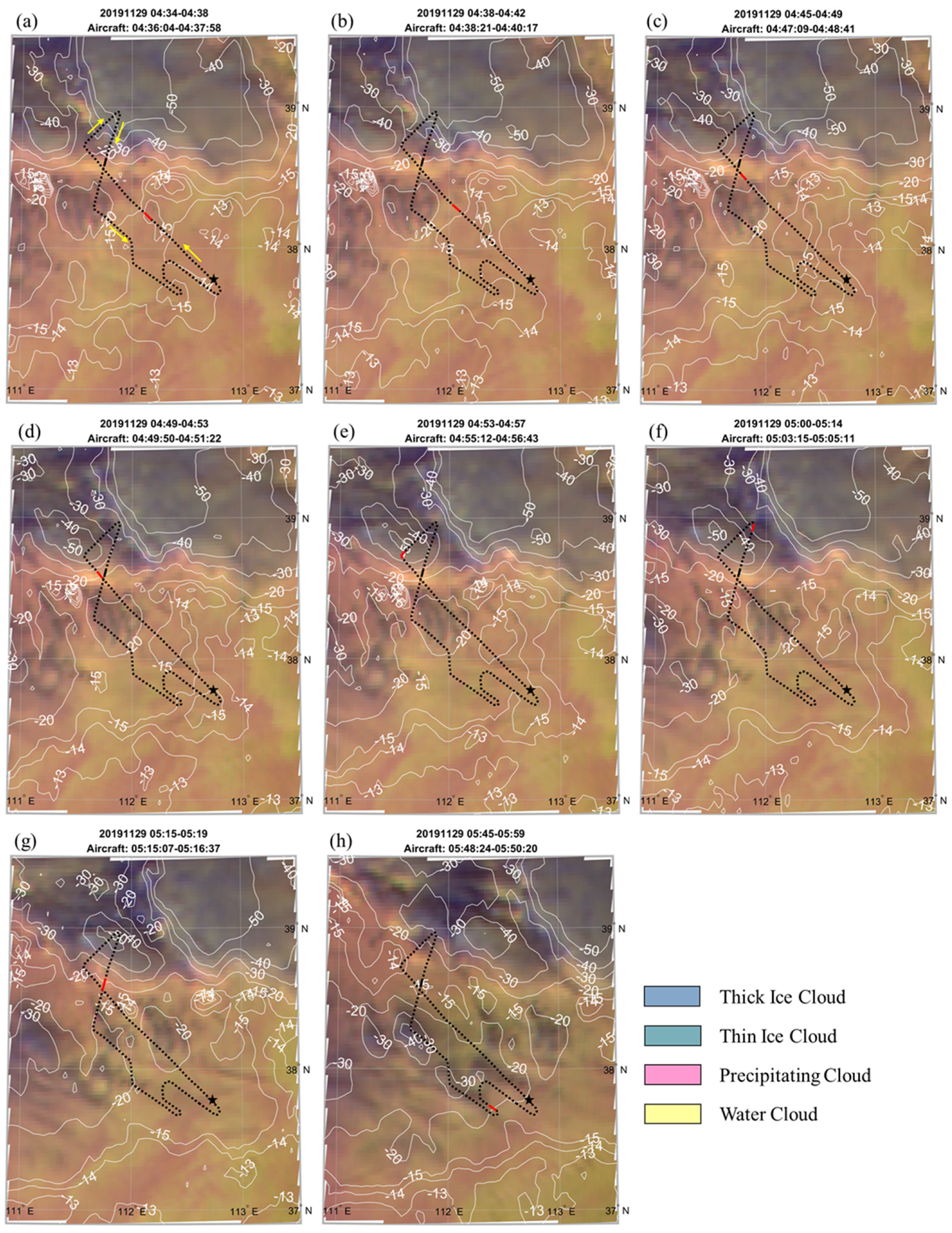
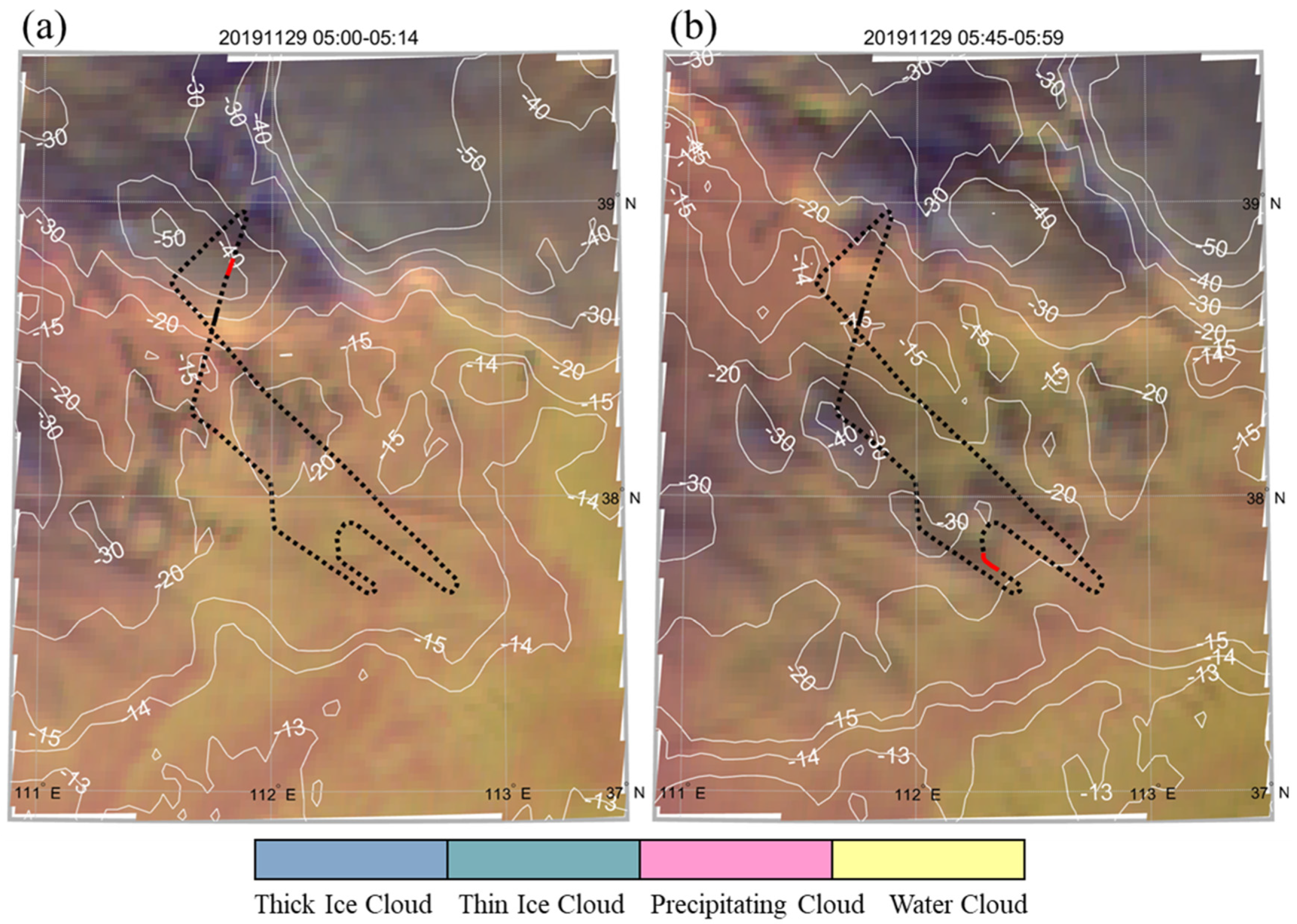
4.2. Validation against Aircraft Detections
4.3. Comparison with MODIS Cloud Phase Products
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schaefer, V.J. Production of ice crystals in a cloud of supercooled water droplets. Science 1946, 104, 457–459. [Google Scholar] [CrossRef] [PubMed]
- Lei, H.; Hong, Y.; Zhao, Z.; Xiao, H.; Guo, X. Advances in cloud and precipitation physics and weather modification in recent years. Chin. J. Atmos. Sci. 2008, 32, 967–974. [Google Scholar]
- Hong, Y. Research progress of stratiform cloud structure and precipitation mechanism and discussion on artificial precipitation problems. Clim. Environ. Res. 2012, 17, 937–950. [Google Scholar]
- Yang, W.; Zhou, Y.; Sun, J.; Wu, Z. Observational studies of distribution characteristics of supercooled cloud water during a westerly trough process. Acta. Meteor. Sinica. 2014, 72, 583–595. [Google Scholar]
- Yue, Z.; Yu, X.; Liu, G.; Wang, J.; Dai, J.; Li, J. Effect evaluation of an operational precipitation enhancement of cold cloud by aircraft. Acta Meteor. Sin. 2021, 79, 853–963. [Google Scholar]
- Ackerman, S.A.; Smith, W.L.; Spinhirne, J.D.; Revercomb, H.E. The 27-28 October 1986 FIRE IFO cirrus case study: Spectral properties of cirrus clouds in the 8-12 μm window. Mon. Wea. Rev. 1990, 118, 2377–2388. [Google Scholar] [CrossRef]
- Zhou, Z.; Bai, J.; Liu, J.; Ji, F.; Qi, L.; Li, W. The application of cloud phase recognition by MODIS spectral data. J. App. Meteor. Sci. 2005, 16, 678–684. [Google Scholar]
- Baum, B.A.; Soulen, P.F.; Strabala, K.I.; King, M.D.; Ackerman, S.A.; Menzel, W.P.; Yang, P. Remote sensing of cloud properties using MODIS airborne simulator imagery during SUCCESS: 2. Cloud thermodynamic phase. J. Geophys. Res. 2000, 105, 11781–11792. [Google Scholar] [CrossRef]
- Rossow, W.B.; Schiffer, R.A. Advances in understanding clouds from ISCCP. Bull. Amer. Meteor. Soc. 1999, 80, 2261–2287. [Google Scholar] [CrossRef]
- King, M.D.; Platnick, S.; Yang, P. Remote sensing of liquid water and ice cloud optical thickness and effective radius in the Arctic: Application of airborne multispectral MAS data. J. Atmos. Ocean. Technol. 2004, 21, 857–875. [Google Scholar] [CrossRef]
- Arking, A.; Childs, J.D. Retrieval of cloud cover parameters from multispectral satellite images. J. Appl. Meteor. 2003, 24, 322–333. [Google Scholar] [CrossRef]
- Liu, J.; Dong, C.; Zhu, Y.; Zhu, X.; Zhang, W. Thermodynamic phase analysis of cloud particles with FY-1C data. Chinese J. Atmos. Sci. 2003, 27, 901–908. [Google Scholar] [CrossRef]
- Liu, J.; Li, Y. Cloud phase detection algorithm for geostationary satellite data. J. Infrared Millim. Waves 2011, 30, 322–327. [Google Scholar] [CrossRef]
- Luo, S.; Liu, J.; Lu, N. Evaluation and analysis of the cloud phase product derived from FY-3A/VIRR. Meteor. Mon. 2013, 39, 623–632. [Google Scholar]
- Miller, S.D.; Noh, Y.-J.; Heidinger, A.K. Liquid-top mix-phase cloud detection from shortwave-infrared satellite radiometer observations: A physical basis. J. Geophys. Res. Atmos. 2014, 119, 8245–8267. [Google Scholar] [CrossRef]
- Noh, Y.-J.; Miller, S.D.; Heidinger, A.K.; Mace, G.G.; Protat, A.; Alexander, S.P. Satellite-based detection of daytime supercooled liquid-topped mixed-phase clouds over the southern ocean using the advanced Himawari imager. J. Geophys. Res. Atmos. 2019, 124, 2677–2701. [Google Scholar] [CrossRef]
- Wang, Z.; Letu, H.; Shang, H.; Zhao, C.; Li, J.; Ma, R. A Supercooled water cloud detection algorithm using Himawari-8 satellite measurements. J. Geophys. Res. Atmos. 2019, 124, 2724–2738. [Google Scholar] [CrossRef]
- Hu, J.; Rosenfeld, D.; Zhu, Y.; Lu, X.; Carlin, J. Multi-channel Imager Algorithm (MIA): A novel cloud-top phase classification algorithm. Atmos. Res. 2021, 261, 105767. [Google Scholar] [CrossRef]
- Gao, J.; Chen, J.; Tian, X. Ensemble-learning-based cloud phase classification method for Fengyun-4 remote sensing images. Infrared Technol. 2020, 42, 68–74. [Google Scholar] [CrossRef]
- Sheng, X.; Sun, L.; Zheng, Q. Simulated annealing optimized BP-ANN method for cloud thermodynamic phase retrieval. J. PLA Univ. Sci. Technol. 2008, 9, 98–102. [Google Scholar]
- Li, X.; Ma, J.; Liang, X. Retrieving cloud phase based on BP neural network. J. Atmos. Environ. Opt. 2010, 5, 299–304. [Google Scholar]
- Xiong, X.; Yang, C.; Ao, M.; Guo, J.; Zeng, D. A research on cloud phase detection based on BP neural network. Remote Sens. Technol. Appl. 2015, 30, 714–718. [Google Scholar]
- Jin, Z.; Zhang, L.; Liu, S.; Yi, F. Cloud detection and cloud phase retrieval based on BP neural network. Opt. Optoelectron. Technol. 2016, 14, 74–77. [Google Scholar]
- Yang, J.; Zhang, Z.; Wei, C.; Lu, F.; Guo, Q. Introducing the New Generation of Chinese Geostationary Weather Satellites, Fengyun-4. Bull. Am. Meteorol. Soc. 2017, 98, 1637–1658. [Google Scholar] [CrossRef]
- Hunt, W.H.; Winker, D.M.; Vaughan, M.A.; Powell, K.A.; Lucker, P.L.; Weimer, C. CALIPSO lidar description and performance assessment. J. Atmos. Ocean. Technol. 2009, 26, 1214–1228. [Google Scholar] [CrossRef]
- Hu, Y.; Winker, D.; Vaughan, M.; Lin, B.; Omar, A.; Trepte, C.; Flittner, D.; Yang, P.; Nasiri, S.L.; Baum, B.; et al. CALIPSO/CALIOP cloud phase discrimination algorithm. J. Atmos. Ocean. Technol. 2009, 26, 2293–2309. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Winker, D.; Yang, P.; Baum, B.; Poole, L.; Vann, L. Identification of cloud phase from PICASSO-CENA lidar depolarization: A multiple scattering sensitivity study. J. Quant. Spectrosc. Radiat. Transf. 2001, 70, 569–579. [Google Scholar] [CrossRef]
- Marchant, B.; Platnick, S.; Meyer, K.; Arnold, G.T.; Riedi, J. MODIS Collection 6 shortwave-derived cloud phase classification algorithm and comparisons with CALIOP. Atmos. Meas. Tech. 2016, 9, 1587–1599. [Google Scholar] [CrossRef] [Green Version]
- Cai, Z.; Cai, M.; Li, P.; Li, J.; Sun, H.; Gu, Y.; Gao, X. Aircraft observation research on macro and microphysics characteristics of continental cumulus cloud at different development stages. Chin. J. Atmos. Sci. 2019, 43, 1191–1203. [Google Scholar]
- Dong, X.; Zhao, C.; Huang, Z.; Mai, R.; Lv, F.; Xue, X.; Zhang, X.; Hou, S.; Yang, Y.; Yang, Y.; et al. Increase of precipitation by cloud seeding observed from a case study in November 2020 over Shijiazhuang, China. Atmos. Res. 2021, 262, 105766. [Google Scholar] [CrossRef]
- Kokhanovsky, A. Optical properties of terrestrial clouds. Earth-Sci. Rev. 2004, 64, 189–241. [Google Scholar] [CrossRef]
- Warren, S.G. Optical properties of ice and snow. Phil. Trans. R. Soc. A 2019, 377, 20180161. [Google Scholar] [CrossRef] [PubMed]
- Shi, G. Atmospheric Radiation, 1st ed.; Science Press: Beijing, China, 2007; pp. 134–141. [Google Scholar]
- Hansen, J.E.; Pollack, J.B. Near-infrared light scattering by terrestrial clouds. J. Atmos. Sci. 1970, 27, 265–281. [Google Scholar] [CrossRef]
- Curran, R.J.; Wu, M.-L.C. Skylab near-infrared observations of clouds indicating supercooled liquid water droplets. J. Atmos. Sci. 1982, 39, 635–647. [Google Scholar] [CrossRef]
- Pilewskie, P.; Twomey, S. Cloud phase discrimination by reflectance measurements near 1.6 and 2.2 μm. J. Atmos. Sci. 1987, 44, 3419–3420. [Google Scholar] [CrossRef]
- Lensky, I.M.; Rosenfeld, D. Clouds-aerosols-precipitation satellite analysis tool (CAPSAT). Atmos. Chem. Phys. 2008, 8, 6739–6753. [Google Scholar] [CrossRef] [Green Version]
- Arthur, D.; Vassilvitskii, S. K-Means++: The Advantages of Careful Seeding. In Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms, New Orleans, LA, USA, 7–9 January 2007; pp. 1027–1035. [Google Scholar]
- Jain, A.K. Fundamentals of Digital Image Processing; Prentice Hall: Hoboken, NJ, USA, 1989. [Google Scholar]
- Grosvenor, D.P.; Wood, R. The effect of solar zenith angle on MODIS cloud optical and microphysical retrievals within marine liquid water clouds. Atmos. Chem. Phys. 2014, 14, 7291–7321. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wavelength | 1.6 µm (Red) | 2.2 µm (Green) | 0.46 µm (Blue) |
|---|---|---|---|
| Reflectivity range | 0–40% | 0–40% | 0–100% |
| Type | A1.6 | A2.2 | A0.4 | Color |
|---|---|---|---|---|
| Deep ice clouds | 0.52 | 0.66 | 0.79 |  |
| Thin ice clouds | 0.48 | 0.69 | 0.73 |  |
| Precipitation clouds | 1 | 0.60 | 0.8 |  |
| Water clouds | 1 | 1 | 0.62 |  |
| Land | 0.47 | 0.19 | 0.12 |  |
| Sea | 0.03 | 0.02 | 0.12 |  |
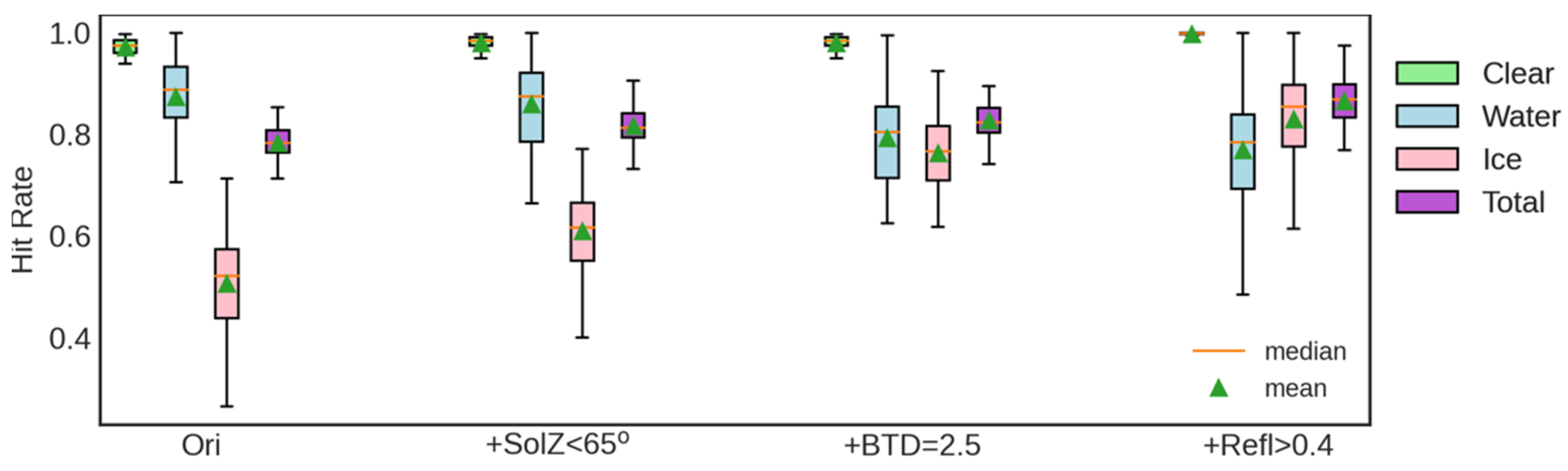
| Hit Rate | K-Mean | K-Mean +SolZ < 65° | K-Mean +SolZ < 65° +BTD = 2.5 | K-mean +SolZ < 65° +BTD = 2.5 +Refl0.46μm > 0.4 |
|---|---|---|---|---|
| Clear | 0.97 | 0.98 | 0.98 | 1.0 |
| Water | 0.87 | 0.86 | 0.79 | 0.77 |
| Ice | 0.51 | 0.61 | 0.76 | 0.83 |
| Total | 0.78 | 0.82 | 0.83 | 0.87 |
| Order | Satellite Scanning Time (UTC) | Airborne Detection Time (UTC) | Satellite Cloud Top Height (m) | Airborne Detection Height (m) | Flight Status | CIP Image (Frame) | Airborne Detected Phase (%) | Satellite-Identified Phase | Consistency |
|---|---|---|---|---|---|---|---|---|---|
| A | 04:34–04:38 | 04:36:04–04:37:58 | 5325 | 3645 | Level flight | 115 | Water clouds 97, ice clouds 3 | Water clouds | Consistent |
| B | 04:38–04:42 | 04:38:21–04:40:17 | 5272 | 3643 | Level flight | 110 | Water clouds 96, ice clouds 4 | Water clouds | Consistent |
| C | 04:45–04:49 | 04:47:09–04:48:41 | 5456 | 4186–4290 | ascending | 93 | Water clouds 99, ice clouds 1 | Water clouds | Consistent |
| D | 04:49–04:53 | 04:49:50–04:51:22 | 5227 | 4296–4379 | ascending | 93 | Water clouds 99, ice clouds 1 | Water clouds | Consistent |
| E | 04:53–04:57 | 04:55:12–04:56:43 | 8857 | 4593 | Level flight | 11 | Ice clouds 100 | Ice clouds | Consistent |
| F | 05:00–05:14 | 05:03:15–05:05:11 | 6550 | 4572 | Level flight | 22 | Ice clouds 100 | Ice clouds | Consistent |
| G | 05:15–05:19 | 05:15:07–05:16:37 | 5412 | 4568 | Level flight near cloud top | 41 | Water clouds 99, ice clouds 1 | Water clouds | Consistent |
| H | 05:45–05:59 | 05:48:24–05:50:20 | 5728 | 3649–3577 | Descending | 113 | Water clouds 94, ice clouds 6 | Water clouds | Consistent |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Zeng, Y.; Yu, X.; Liu, G.; Yue, Z.; Dai, J.; Feng, Q.; Liu, P.; Wang, J.; Zhu, Y. Identification of Supercooled Cloud Water by FY-4A Satellite and Validation by CALIPSO and Airborne Detection. Remote Sens. 2023, 15, 126. https://doi.org/10.3390/rs15010126
Xu X, Zeng Y, Yu X, Liu G, Yue Z, Dai J, Feng Q, Liu P, Wang J, Zhu Y. Identification of Supercooled Cloud Water by FY-4A Satellite and Validation by CALIPSO and Airborne Detection. Remote Sensing. 2023; 15(1):126. https://doi.org/10.3390/rs15010126
Chicago/Turabian StyleXu, Xiaohong, Yi Zeng, Xing Yu, Guihua Liu, Zhiguo Yue, Jin Dai, Qiujuan Feng, Pu Liu, Jin Wang, and Yannian Zhu. 2023. "Identification of Supercooled Cloud Water by FY-4A Satellite and Validation by CALIPSO and Airborne Detection" Remote Sensing 15, no. 1: 126. https://doi.org/10.3390/rs15010126
APA StyleXu, X., Zeng, Y., Yu, X., Liu, G., Yue, Z., Dai, J., Feng, Q., Liu, P., Wang, J., & Zhu, Y. (2023). Identification of Supercooled Cloud Water by FY-4A Satellite and Validation by CALIPSO and Airborne Detection. Remote Sensing, 15(1), 126. https://doi.org/10.3390/rs15010126