
Time Series Analysis Methods and Detectability Factors for Ground-Based Imaging of the LCROSS Impact Plume

 , ,
, ,
Abstract
:
1. Introduction
2. Data
2.1. Astrophysical Research Consortium 3.5 m Telescope Agile Camera
2.2. Magdalena Ridge Observatory 2.4 m Telescope Two-Channel Dichroic PHOTGJON and PHOTDOC
2.3. 6.5 m Fred Lawrence Whipple Multiple Mirror Telescope Observatory 0.7 μm CCD47
2.4. New Mexico State University 1.0 m Telescope StellaCam Video
2.5. Tortugas Mountain Observatory 0.6 m Telescope Goodrich Video
3. Methodology
3.1. Coregistration Employing a PCA-Filtered Reference Image
3.2. Faint Lightcurve Detection by Cumulative Sequential Elimination of PCs
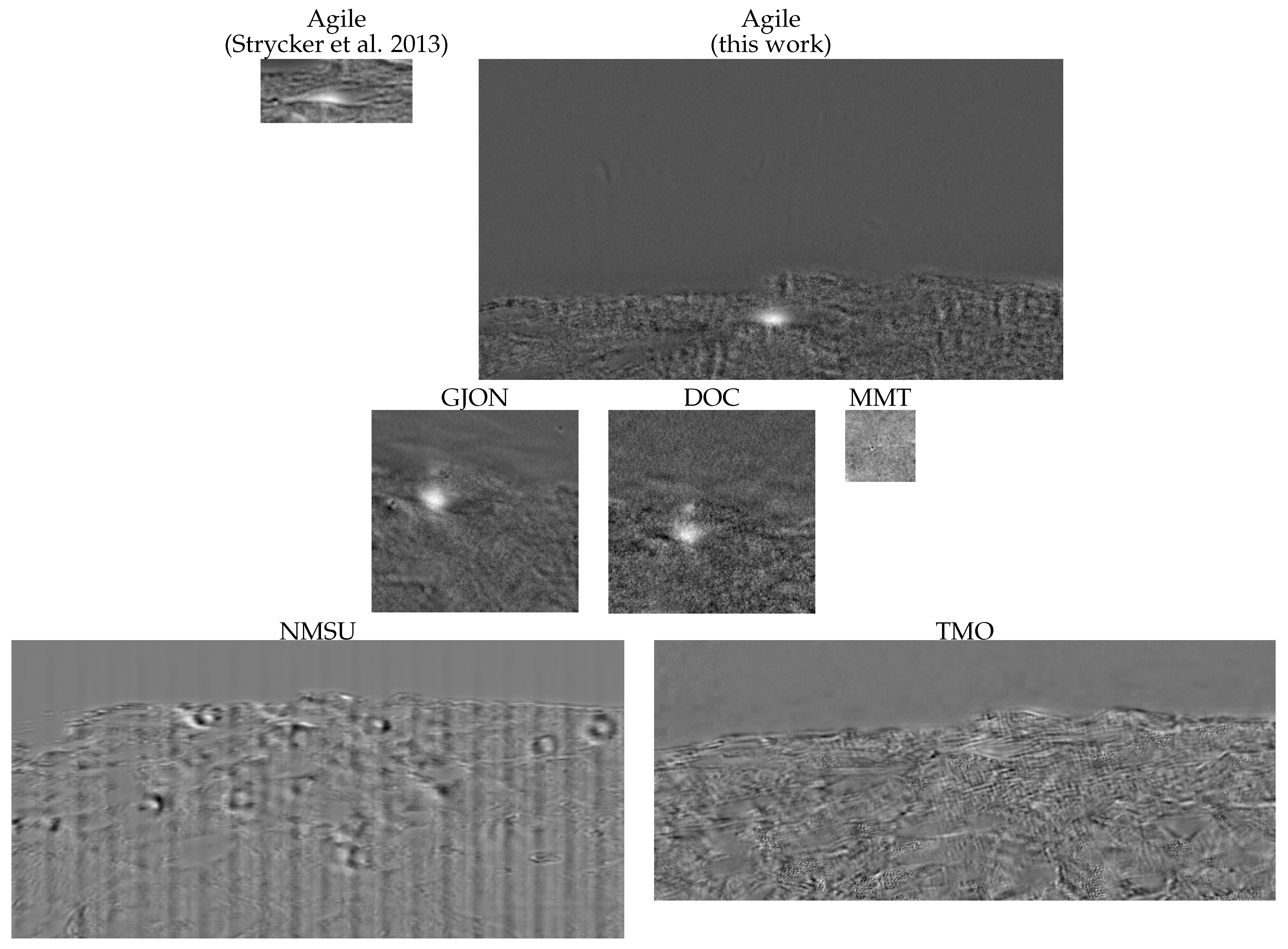
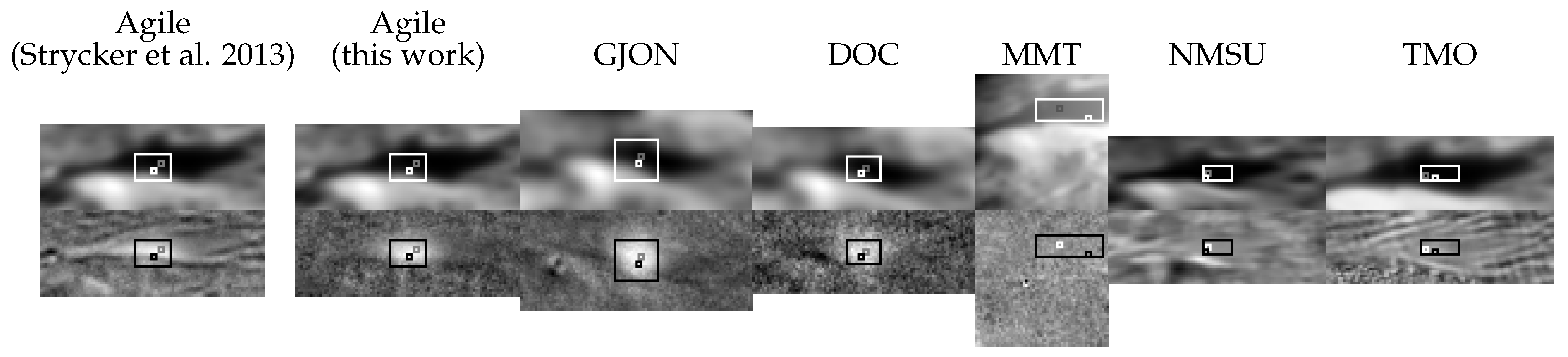
4. Results
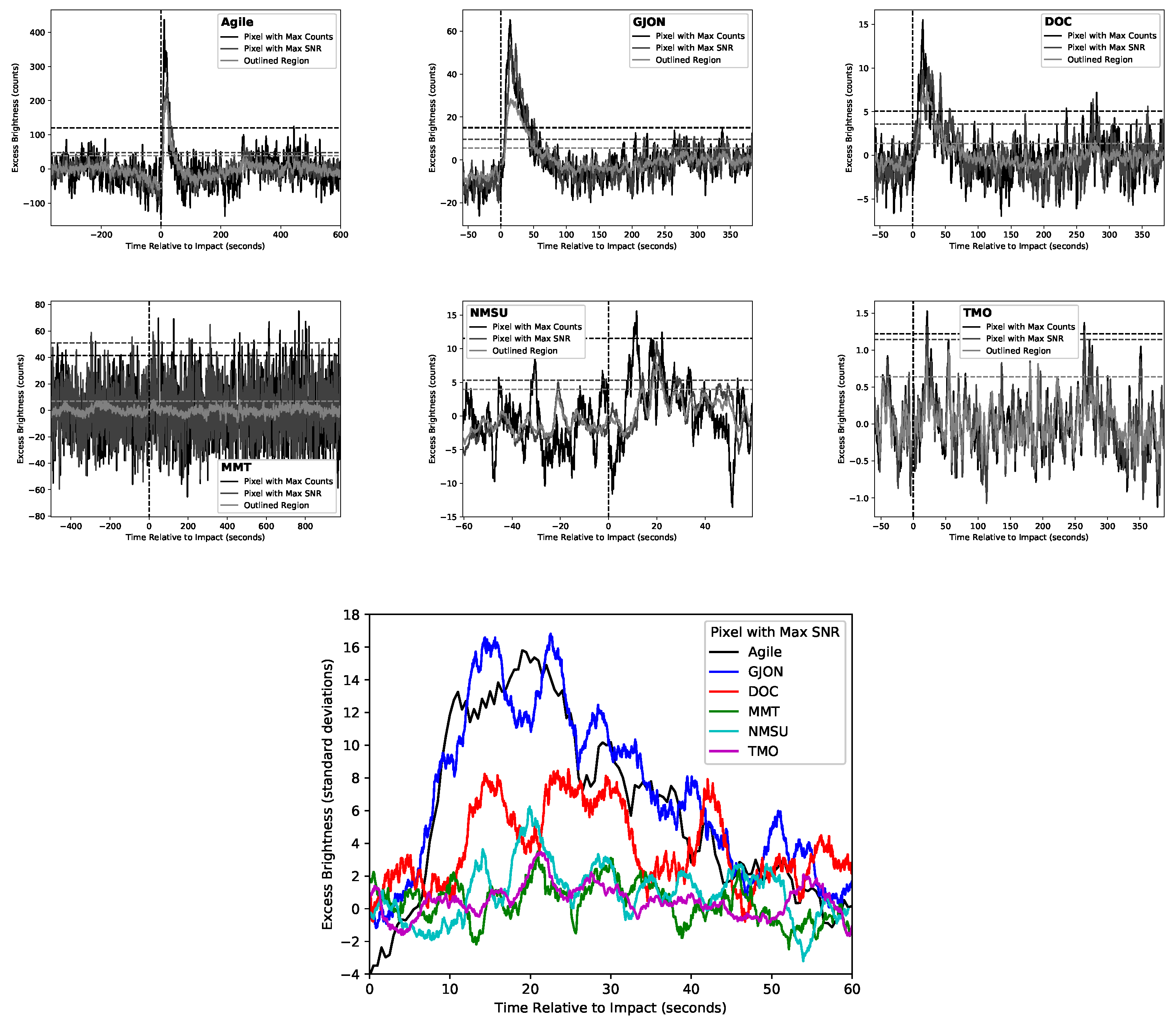
4.1. Plume Lightcurves
4.2. Non-Detections
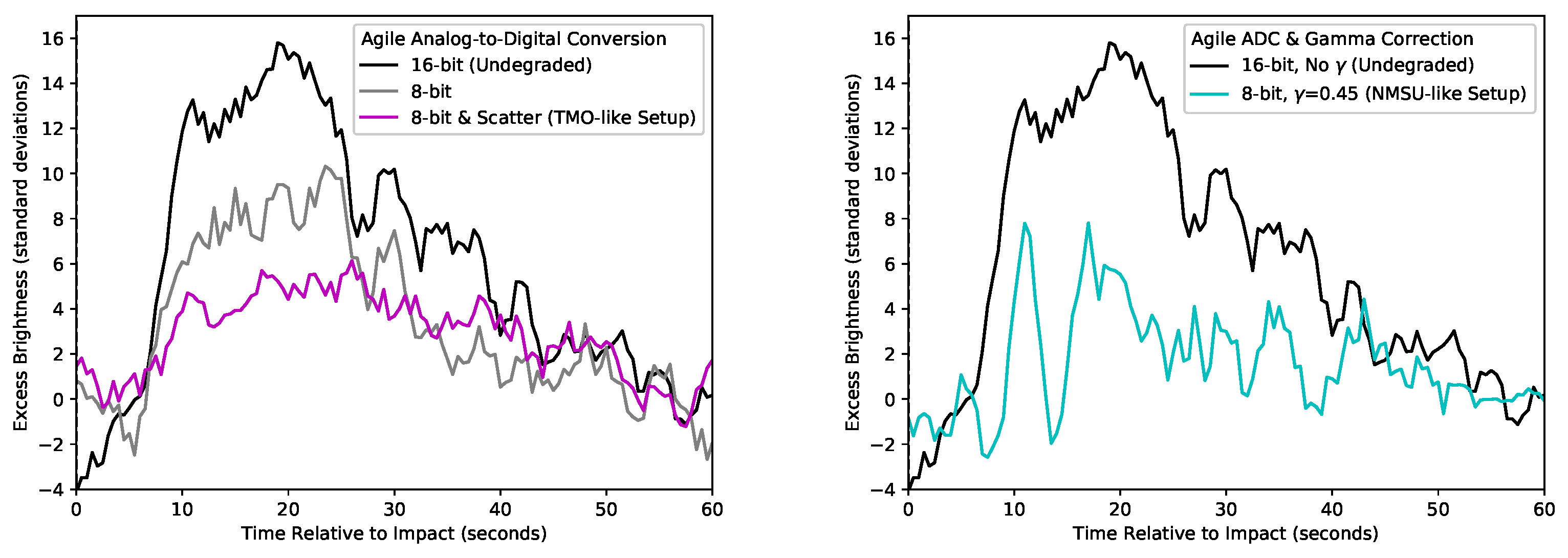
4.3. Lightcurve Retrievals from Degraded Detection Data
4.3.1. Effects of Scattered Light, Atmospheric Seeing, and Exposure Time
4.3.2. Effects of ADC Reduction to 8-Bit and Gamma Correction
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analog-to-Digital Conversion |
| APO | Apache Point Observatory |
| ARC | Astrophysical Research Consortium |
| CCD | Charge-Coupled Device |
| CSE | Cumulative Sequential Elimination |
| DOC | PHOTDOC |
| FFT | Fast Fourier Transform |
| FOV | Field Of View |
| FWHM | Full-Width-at-Half-Maximum |
| GJON | PHOTGJON |
| LCROSS | Lunar CRater Observation and Sensing Satellite |
| MMT | 6.5 m Fred Lawrence Whipple Multiple Mirror Telescope Observatory |
| MRO | Magdalena Ridge Observatory |
| NASA | National Aeronautics and Space Administration |
| NMSU | New Mexico State University |
| PC | Principal Component |
| PCA | Principal Component Analysis |
| PDS | Planetary Data System |
| PSF | Point Spread Function |
| PSR | Permanently Shadowed Region |
| SNR | Signal-to-Noise Ratio |
| TMO | Tortugas Mountain Observatory |
References
- Colaprete, A.; Schultz, P.; Heldmann, J.; Wooden, D.; Shirley, M.; Ennico, K.; Hermalyn, B.; Marshall, W.; Ricco, A.; Elphic, R.C.; et al. Detection of Water in the LCROSS Ejecta Plume. Science 2010, 330, 463. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schultz, P.H.; Hermalyn, B.; Colaprete, A.; Ennico, K.; Shirley, M.; Marshall, W.S. The LCROSS Cratering Experiment. Science 2010, 330, 468. [Google Scholar] [CrossRef] [PubMed]
- Feldman, W.C.; Maurice, S.; Binder, A.B.; Barraclough, B.L.; Elphic, R.C.; Lawrence, D.J. Fluxes of Fast and Epithermal Neutrons from Lunar Prospector: Evidence for Water Ice at the Lunar Poles. Science 1998, 281, 1496. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feldman, W.C.; Lawrence, D.J.; Elphic, R.C.; Vaniman, D.T.; Thomsen, D.R.; Barraclough, B.L.; Maurice, S.; Binder, A.B. Chemical information content of lunar thermal and epithermal neutrons. J. Geophys. Res. Planets 2000, 105, 20347–20364. [Google Scholar] [CrossRef]
- Feldman, W.C.; Maurice, S.; Lawrence, D.J.; Little, R.C.; Lawson, S.L.; Gasnault, O.; Wiens, R.C.; Barraclough, B.L.; Elphic, R.C.; Prettyman, T.H.; et al. Evidence for water ice near the lunar poles. J. Geophys. Res. Planets 2001, 106, 23231–23252. [Google Scholar] [CrossRef]
- Colaprete, A.; Elphic, R.C.; Heldmann, J.; Ennico, K. An Overview of the Lunar Crater Observation and Sensing Satellite (LCROSS). Space Sci. Rev. 2012, 167, 3–22. [Google Scholar] [CrossRef]
- Boazman, S.; Kereszturi, A.; Heather, D.; Sefton-Nash, E.; Orgel, C.; Tomka, R.; Houdou, B.; Lefort, X. Analysis of the Lunar South Polar Region for PROSPECT, NASA/CLPS. In Proceedings of the Europlanet Science Congress, Granada, Spain, 18–23 September 2022; p. EPSC2022-530. [Google Scholar] [CrossRef]
- Heldmann, J.L.; Colaprete, A.; Wooden, D.H.; Ackermann, R.F.; Acton, D.D.; Backus, P.R.; Bailey, V.; Ball, J.G.; Barott, W.C.; Blair, S.K.; et al. LCROSS (Lunar Crater Observation and Sensing Satellite) Observation Campaign: Strategies, Implementation, and Lessons Learned. Space Sci. Rev. 2012, 167, 93–140. [Google Scholar] [CrossRef] [Green Version]
- Heldmann, J.L.; Lamb, J.; Asturias, D.; Colaprete, A.; Goldstein, D.B.; Trafton, L.M.; Varghese, P.L. Evolution of the dust and water ice plume components as observed by the LCROSS visible camera and UV-visible spectrometer. Icarus 2015, 254, 262–275. [Google Scholar] [CrossRef]
- Killen, R.M.; Potter, A.E.; Hurley, D.M.; Plymate, C.; Naidu, S. Observations of the lunar impact plume from the LCROSS event. Geophys. Res. Lett. 2010, 37, L23201. [Google Scholar] [CrossRef]
- Chanover, N.J.; Miller, C.; Hamilton, R.T.; Suggs, R.M.; McMillan, R. Results from the NMSU-NASA Marshall Space Flight Center LCROSS observational campaign. J. Geophys. Res. Planets 2011, 116, E08003. [Google Scholar] [CrossRef]
- Hong, P.K.; Sugita, S.; Okamura, N.; Sekine, Y.; Terada, H.; Takatoh, N.; Hayano, Y.; Fuse, T.; Pyo, T.S.; Kawakita, H.; et al. A ground-based observation of the LCROSS impact events using the Subaru Telescope. Icarus 2011, 214, 21–29. [Google Scholar] [CrossRef]
- Strycker, P.D.; Chanover, N.J.; Miller, C.; Hamilton, R.T.; Hermalyn, B.; Suggs, R.M.; Sussman, M. Characterization of the LCROSS impact plume from a ground-based imaging detection. Nat. Commun. 2013, 4, 2620. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murtagh, F.; Heck, A. Multivariate Data Analysis; Springer: Berlin/Heidelberg, Germany, 1987; Volume 131, ISBN 978-94-009-3789-5. [Google Scholar] [CrossRef]
- Mukadam, A.S.; Owen, R.; Mannery, E.; MacDonald, N.; Williams, B.; Stauffer, F.; Miller, C. High-Speed Time-Series CCD Photometry with Agile. Publ. Astron. Soc. Pac. 2011, 123, 1423. [Google Scholar] [CrossRef]
- Young, E.F.; Young, L.A.; Olkin, C.B.; Buie, M.W.; Shoemaker, K.; French, R.G.; Regester, J. Development and Performance of the PHOT (Portable High-Speed Occultation Telescope) Systems. Publ. Astron. Soc. Pac. 2011, 123, 735. [Google Scholar] [CrossRef] [Green Version]
- Ennico, K.; Shirley, M.; Colaprete, A.; Osetinsky, L. The Lunar Crater Observation and Sensing Satellite (LCROSS) Payload Development and Performance in Flight. Space Sci. Rev. 2012, 167, 23–69. [Google Scholar] [CrossRef] [Green Version]
- Luchsinger, K.M.; Chanover, N.J.; Strycker, P.D. Water within a permanently shadowed lunar crater: Further LCROSS modeling and analysis. Icarus 2021, 354, 114089. [Google Scholar] [CrossRef]
- Southworth, J.; Hinse, T.C.; Jørgensen, U.G.; Dominik, M.; Ricci, D.; Burgdorf, M.J.; Hornstrup, A.; Wheatley, P.J.; Anguita, T.; Bozza, V.; et al. High-precision photometry by telescope defocusing—I. The transiting planetary system WASP-5. Mon. Not. R. Astron. Soc. 2009, 396, 1023–1031. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Set | Agile | GJON | DOC | MMT | NMSU | TMO |
|---|---|---|---|---|---|---|
| Wavelength | MSSS V | blue * | red * | 0.70 ± 0.02 μm | R | NIR |
| Neutral Density or U Filter | ND2.5 | U | U | ND2.5 | - | - |
| Lunagraph (to reduce scattered light) | Yes | - | - | - | - | - |
| ADC Resolution | 16-bit | 16-bit | 16-bit | 16-bit | 8-bit | 8-bit |
| ADC Gamma Correction | - | - | - | - | 0.45 | - |
| Telescope Diameter (m) | 3.5 | 2.4 | 2.4 | 6.5 | 1.0 | 0.6 |
| Adaptive Optics | - | - | - | Yes | - | - |
| Seeing Point Spread Function (arcsec) | 0.8–1.4 | 2 | 2 | 0.38 | 0.8–1.4 † | 1 ‡ |
| Image Scale (arcsec pixel−1) | 0.26 | 0.27 | 0.29 | 0.27 | 0.28–0.33 | 0.22 |
| Scale at Lunar Distance (km pixel−1) | 0.46 | 0.49 | 0.51 | 0.48 | 0.51–0.60 | 0.39 |
| Dimensions of Usable Image (pixels) | 466 × 256 | 165 × 161 | 165 × 162 | 56 × 57 | 643 × 313 | 652 × 273 |
| FOV at Lunar Distance (km) | 214 × 118 | 80 × 78 | 84 × 83 | 27 × 27 | 328 × 188 | 254 × 106 |
| Frame Integration Time (s) | 0.5 | 0.032 | 0.032 | 0.071 | 0.001 | 0.019 |
| Frame Cadence (s) | 0.5 | 0.034 | 0.034 | 0.079 | 0.033 | 0.033 |
| Total Observation Duration (s) | 968 | 442 | 442 | 1482 | 120 | 447 |
| Data Set | Agile | GJON | DOC | MMT | NMSU | TMO |
|---|---|---|---|---|---|---|
| Illuminated Surface (counts) | 58,325 | 10,359 | 1555 | 13,620 | 1520 | 228 |
| Full-frame Scattered Light (counts) | 4274 | 2204 | 341 | 8318 | 45 | 41 |
| Dynamic Range (counts) | 54,051 | 8155 | 1214 | 5302 | 1475 | 187 |
| SNR of Illuminated Surface | 232 | 90 | 35 | 73 | 38 | 14 |
| Dynamic Range/Full-frame Scattered Light | 12.6 | 3.7 | 3.6 | 0.6 | 33 | 4.6 |
| Wavelength Band (to indicate solar insolation) | V | visible | visible | 0.7 μm | R | J & H |
| Total Usable Frames | 1937 | 12,962 | 12,970 | 17,986 | 3598 | 13,406 |
| Detection | Non-Detection | |||||
|---|---|---|---|---|---|---|
| Data Set | Agile | GJON | DOC | MMT | NMSU | TMO |
| Total Number of Frames and, therefore, PCs | 1937 | 12,962 | 12,970 | 17,986 | 3598 | 13,406 |
| Highest PC Removed for PCA Filtering | 46 | 46 | 20 | 23 | 22 | 150 |
| Percent of PCs Removed for PCA Filtering | 2.37% | 0.35% | 0.15% | 0.13% | 0.61% | 1.12% |
| Excess Brightness of Plume Location † (counts) | 158.7 | 25.0 | 6.4 | 4.4 | 3.8 | 0.4 |
| Peak Plume Brightness ‡ (counts) | 436.6 | 65.2 | 15.5 | - | - | - |
| SNR of Plume Location † (standard deviations) * | 6.2 | 5.6 | 3.8 | 0.3 | 2.2 | 1.2 |
| Dynamic Range/Plume Brightness † | 341 | 326 | 190 | - | - | - |
| Dynamic Range/Peak Plume Brightness ‡ | 124 | 125 | 78 | - | - | - |
| Detection | Non-Detection | |||||
|---|---|---|---|---|---|---|
| Data Set | Agile | GJON | DOC | MMT | NMSU | TMO |
| Excess Brightness of Plume Location † (counts) | 158.7 | 25.0 | 6.4 | 4.4 | 3.8 | 0.4 |
| SNR of Plume Location † (standard deviations) | 6.2 | 5.6 | 3.8 | 0.3 | 2.2 | 1.2 |
| Dynamic Range/Plume Brightness † | 341 | 326 | 190 | - | - | - |
| Dynamic Range/Peak Plume Brightness | 124 | 125 | 78 | - | - | - |
| Dynamic Range/Full-frame Scattered Light | 12.6 | 3.7 | 3.6 | 0.6 | 33 | 4.6 |
| SNR of Illuminated Surface | 232 | 90 | 35 | 73 | 38 | 14 |
| ADC Resolution | 16-bit | 16-bit | 16-bit | 16-bit | 8-bit | 8-bit |
| ADC Gamma Correction | - | - | - | - | 0.45 | - |
| Wavelength Band (to indicate solar insolation) | V | visible | visible | 0.7 μm | R | J & H |
| Neutral Density or U Filter | ND2.5 | U | U | ND2.5 | - | - |
| Lunagraph (to reduce scattered light) | Yes | - | - | - | - | - |
| Telescope Diameter (m) | 3.5 | 2.4 | 2.4 | 6.5 | 1.0 | 0.6 |
| Adaptive Optics | - | - | - | Yes | - | - |
| Seeing Point Spread Function (arcsec) | 0.8–1.4 | 2 | 2 | 0.38 | 0.8–1.4 | 1 |
| Image Scale (arcsec pixel−1) | 0.26 | 0.27 | 0.29 | 0.27 | 0.28–0.33 | 0.22 |
| Image Scale at Lunar Distance (km pixel−1) | 0.46 | 0.49 | 0.51 | 0.48 | 0.51–0.60 | 0.39 |
| Dimensions of Usable Image (pixels) | 466 × 256 | 165 × 161 | 165 × 162 | 57 × 56 | 643 × 313 | 652 × 273 |
| FOV at Lunar Distance (km) | 214 × 118 | 80 × 78 | 84 × 83 | 27 × 27 | 328 × 188 | 254 × 106 |
| Frame Integration Time (s) | 0.5 | 0.032 | 0.032 | 0.071 | 0.001 | 0.019 |
| Frame Cadence (s) | 0.5 | 0.034 | 0.034 | 0.079 | 0.033 | 0.033 |
| Total Usable Frames | 1937 | 12,962 | 12,970 | 17,986 | 3598 | 13,406 |
| Total Observation Duration (s) | 968 | 442 | 442 | 1482 | 120 | 447 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Strycker, P.D.; Chanover, N.J.; Temme, R.L.; Schotte, J.M.; Mueller, P.L.; Karls, E.L. Time Series Analysis Methods and Detectability Factors for Ground-Based Imaging of the LCROSS Impact Plume. Remote Sens. 2023, 15, 37. https://doi.org/10.3390/rs15010037
Strycker PD, Chanover NJ, Temme RL, Schotte JM, Mueller PL, Karls EL. Time Series Analysis Methods and Detectability Factors for Ground-Based Imaging of the LCROSS Impact Plume. Remote Sensing. 2023; 15(1):37. https://doi.org/10.3390/rs15010037
Chicago/Turabian StyleStrycker, Paul D., Nancy J. Chanover, Ruth L. Temme, Jonathan M. Schotte, Payton L. Mueller, and Emily L. Karls. 2023. "Time Series Analysis Methods and Detectability Factors for Ground-Based Imaging of the LCROSS Impact Plume" Remote Sensing 15, no. 1: 37. https://doi.org/10.3390/rs15010037