


Algorithm for the Reconstruction of the Ground Surface Reflectance in the Visible and Near IR Ranges from MODIS Satellite Data with Allowance for the Influence of Ground Surface Inhomogeneity on the Adjacency Effect and of Multiple Radiation Reflection

 , ,
, ,
Abstract
1. Introduction
2. Algorithm for Retrieval of the Surface Reflectance
2.1. Assumptions and Problem Formulation
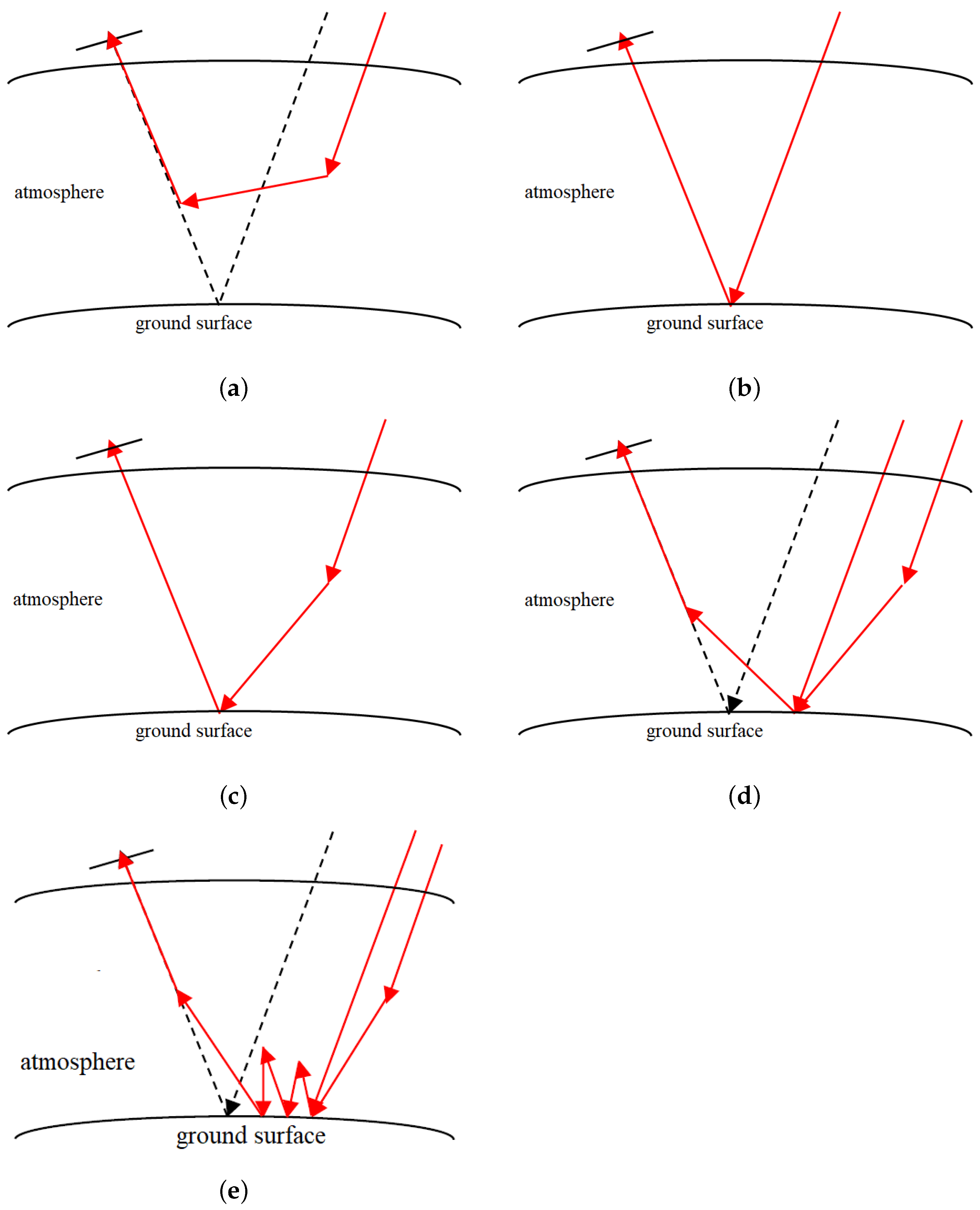
- The atmosphere is a scattering and absorbing aerosol-gas medium.
- The atmosphere is cloudless and vertically stratified into 32 uniform layers.
- The “atmosphere-ground surface” system is spherical, and refraction is ignored. The boundaries of the atmospheric layers are spheres.
- The source of radiation is the sun. There are no other sources.
- The ground surface is non-uniform and reflects radiation according to the Lambert law.
- The ground surface is uniform within a pixel.
- Local topography is ignored.
- The change in the illumination of the ground surface due to a change in the solar zenith angle is negligibly small.
- The radiative transfer is considered in the monochromatic approximation.
2.2. System of Equations to Be Solved
2.3. Additional Simplifications to Reduce the Computation Time
2.3.1. Use of Isoplanar Zones
2.3.2. Use of the Adjacency Effect Radius
2.3.3. Use of the Radius of Effect of Single Reflection on Ground Surface Illumination
2.3.4. Use of Approximations for
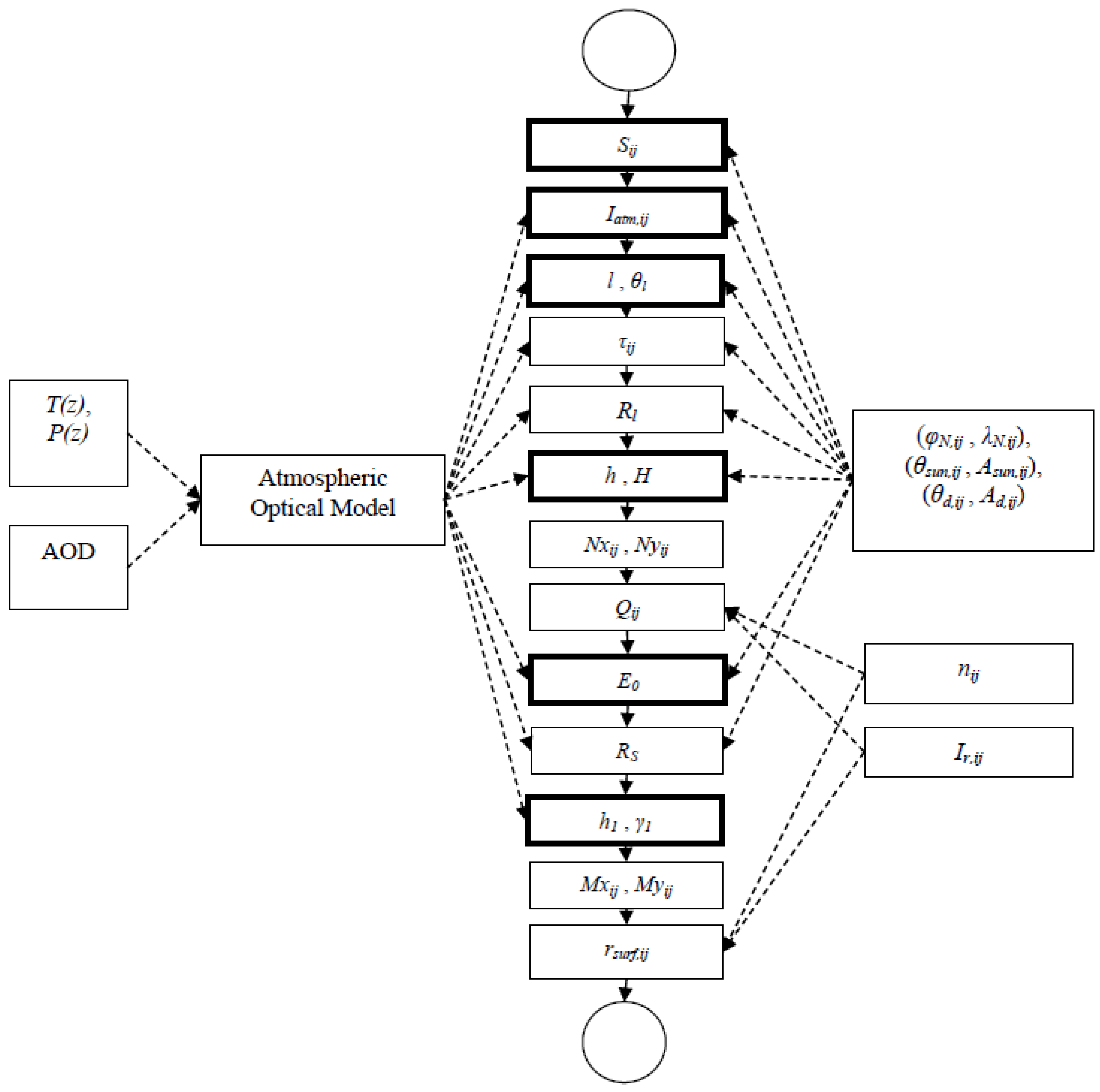
2.4. Block Diagram of the Algorithm
- Formation of the block of input data. Input data are the following: radiance received in the MODIS band (i is the pixel line number, j is the pixel column number); aerosol optical depth (AOD) of the atmosphere; vertical profiles of temperature and pressure ; cloud mask ; information about the mutual positions of observed pixels, the sun, and the satellite (pixel coordinates (), direction to the sun (), direction to the satellite ()). These data can be borrowed from MODIS thematic products MOD021_L2, MOD03_L2, MOD07_L2, MOD35_L2, and MOD08_D3.
- Construction of the atmospheric model. Satellite measurements of AOD, , and formed the basis for constructing the atmospheric model. Profiles of the aerosol extinction and scattering coefficients are set based on MODTRAN models [39] closest in the aerosol optical depth to MODIS data. Profiles of the molecular scattering coefficients are set based on the temperature and pressure profiles and the values of the molecular scattering coefficients from [40]. Profiles of the molecular absorption coefficients are constructed based on the vertical temperature and pressure profiles, the MODTRAN model of the gas composition of the atmosphere for mid-latitude summer, and absorption cross-sections of atmospheric gases from the HITRAN database [41]. The atmospheric models can be found in the Supplementary Materials [37]. The algorithm for construction of these models is described in Appendix A.
- Calculation of the areas . The image under consideration was divided into sections with respect to the closeness to the pixel centers. The algorithm for calculating the areas is described in the Supplementary Materials [37].
- Calculation of the radiance for the radiation non-interacting with the ground surface.
- Determination of the number l and angles of the boundaries of isoplanar zones (zones in which one PSF of the AE h can be used).
- Calculation of direct transmittance at the “observed pixel–receiver” path .
- Calculation of the AE radii for isoplanar zones .
- Calculation of for each isoplanar zone and its integral over the entire ground surface .
- Estimation of the number of pixels in an image (in image lines and columns ) within the AE radius for each pixel.
- Solution of system of linear algebraic Equation (8) for luminosity of observed pixels .
- Calculation of ground surface irradiance neglecting the reflected radiation .
- Calculation of the radii of additional irradiance of the ground surface by surface pixels.
- Calculation of and its integral .
- Estimation of the number of pixels in an image (in image lines and columns ) within the radius of additional irradiance formation for each pixel.
- Solution of system of nonlinear Equation (9) for surface reflectance .
2.5. Algorithm Reliability
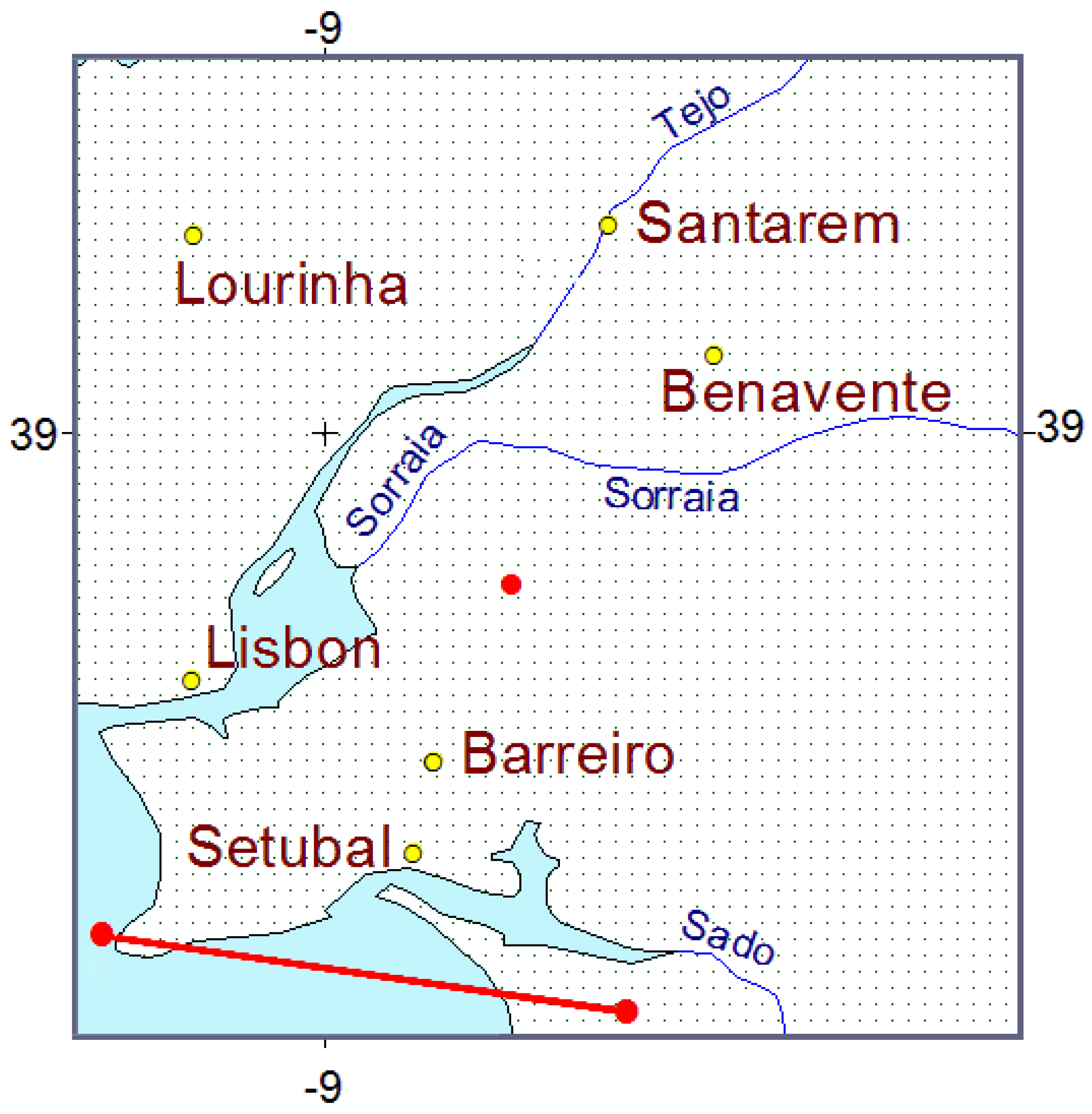
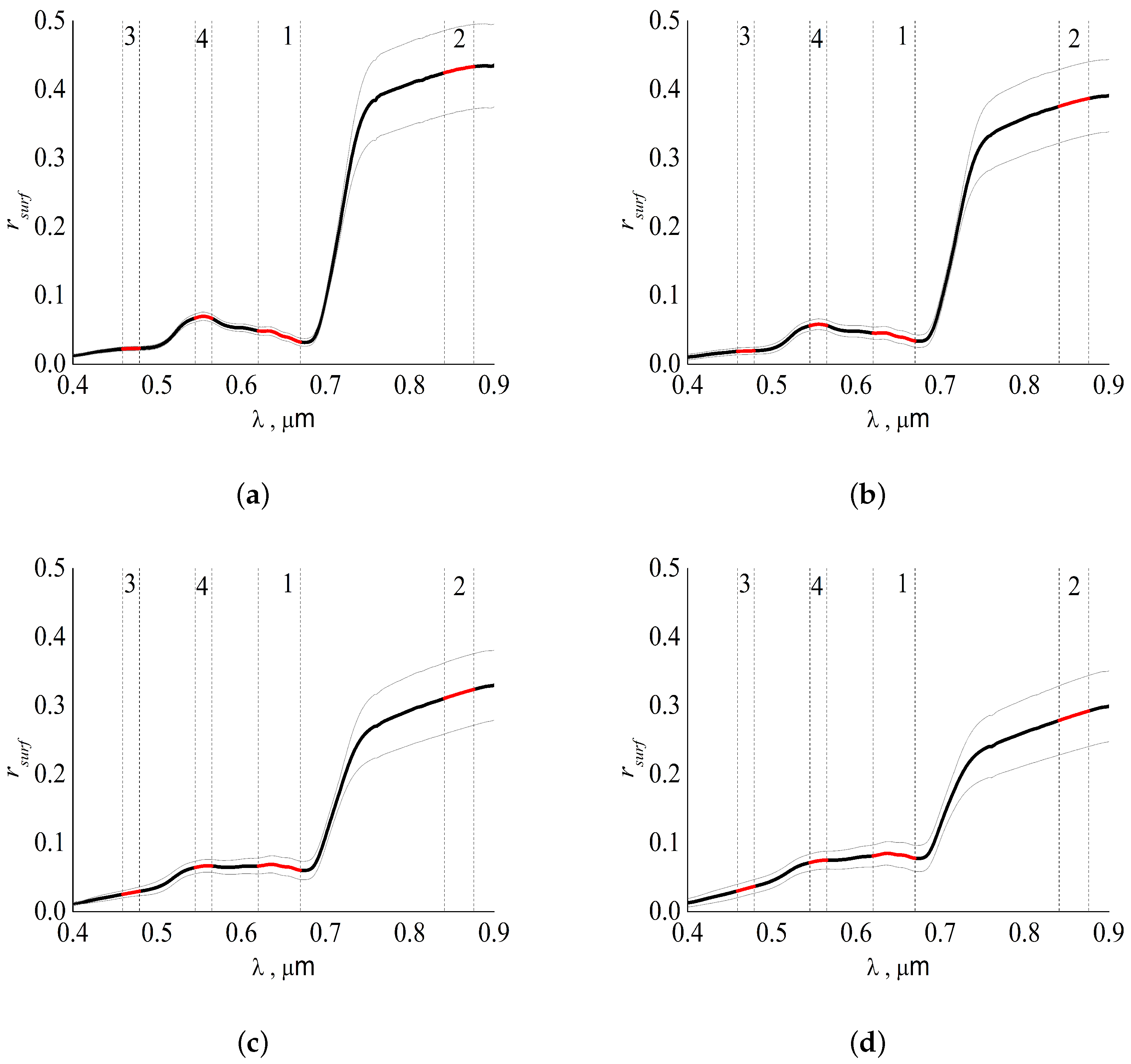
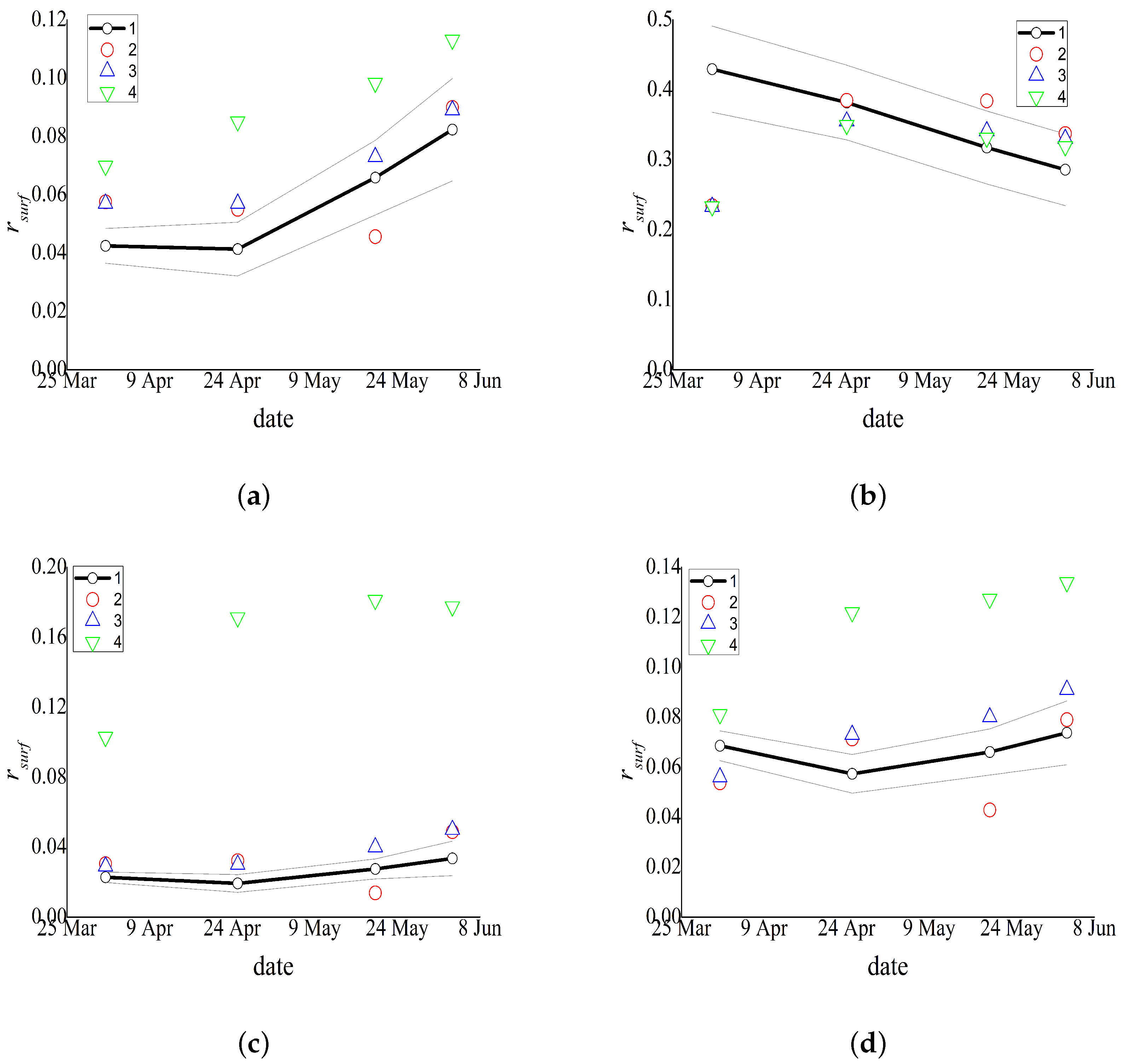
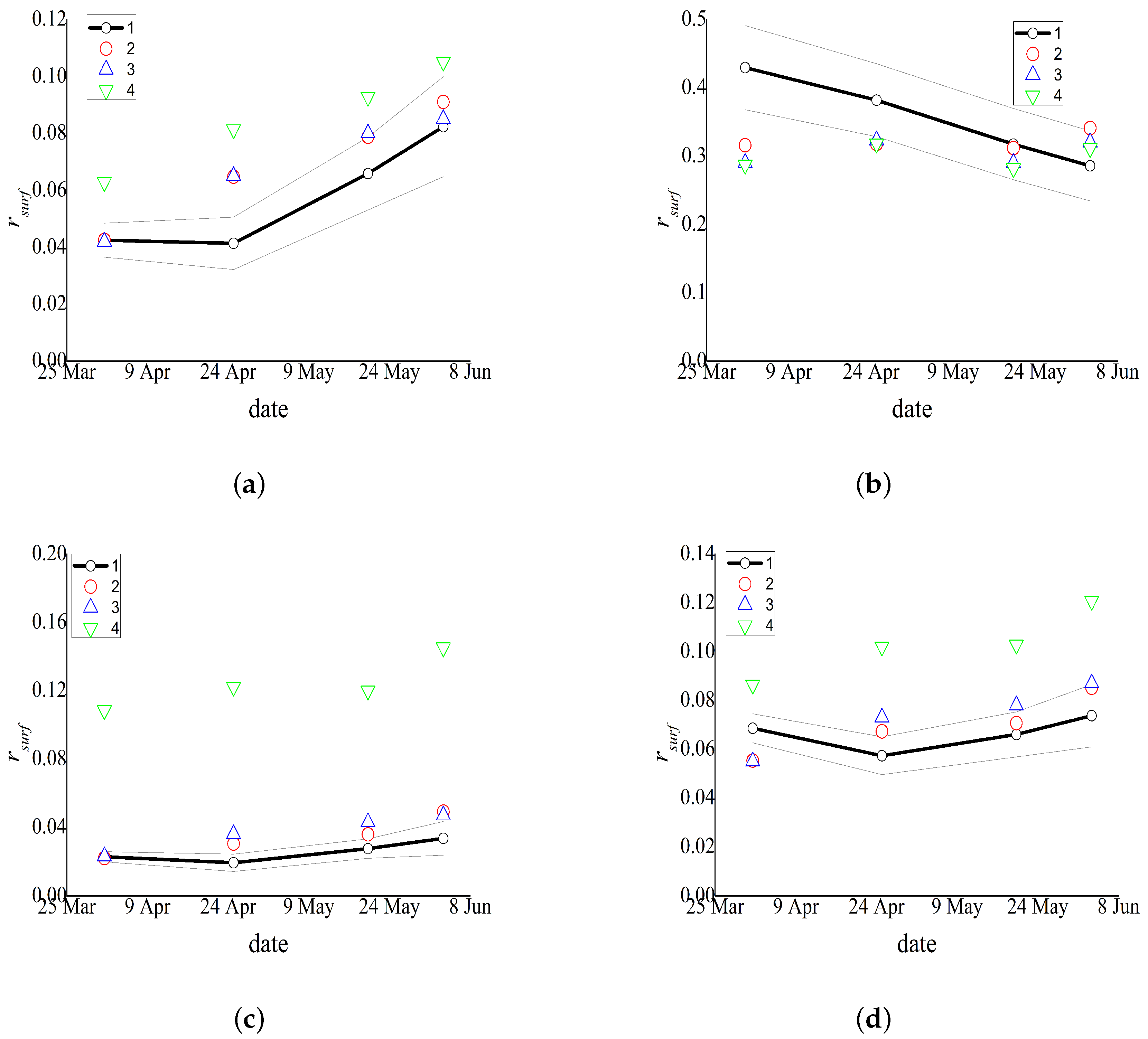
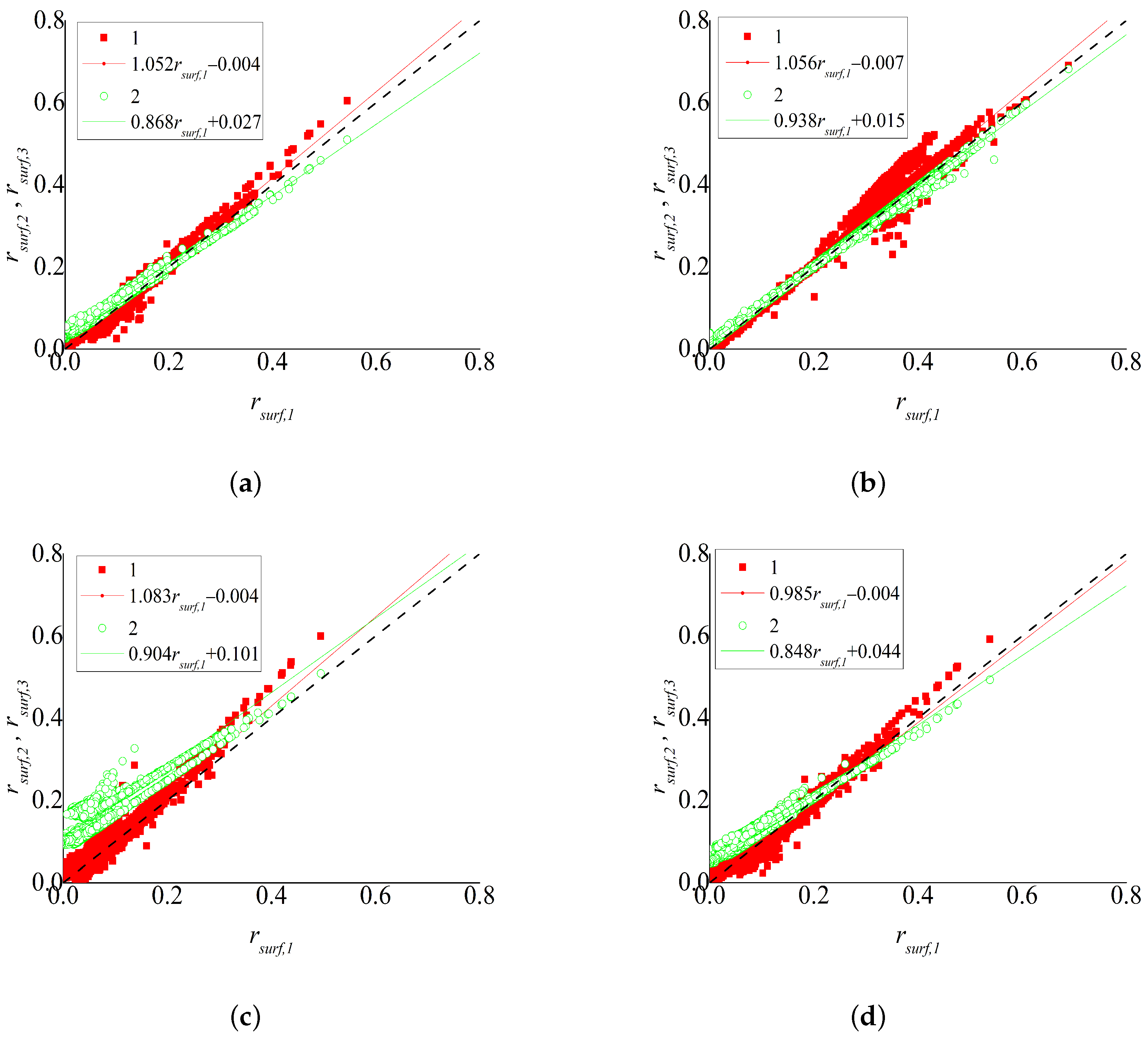
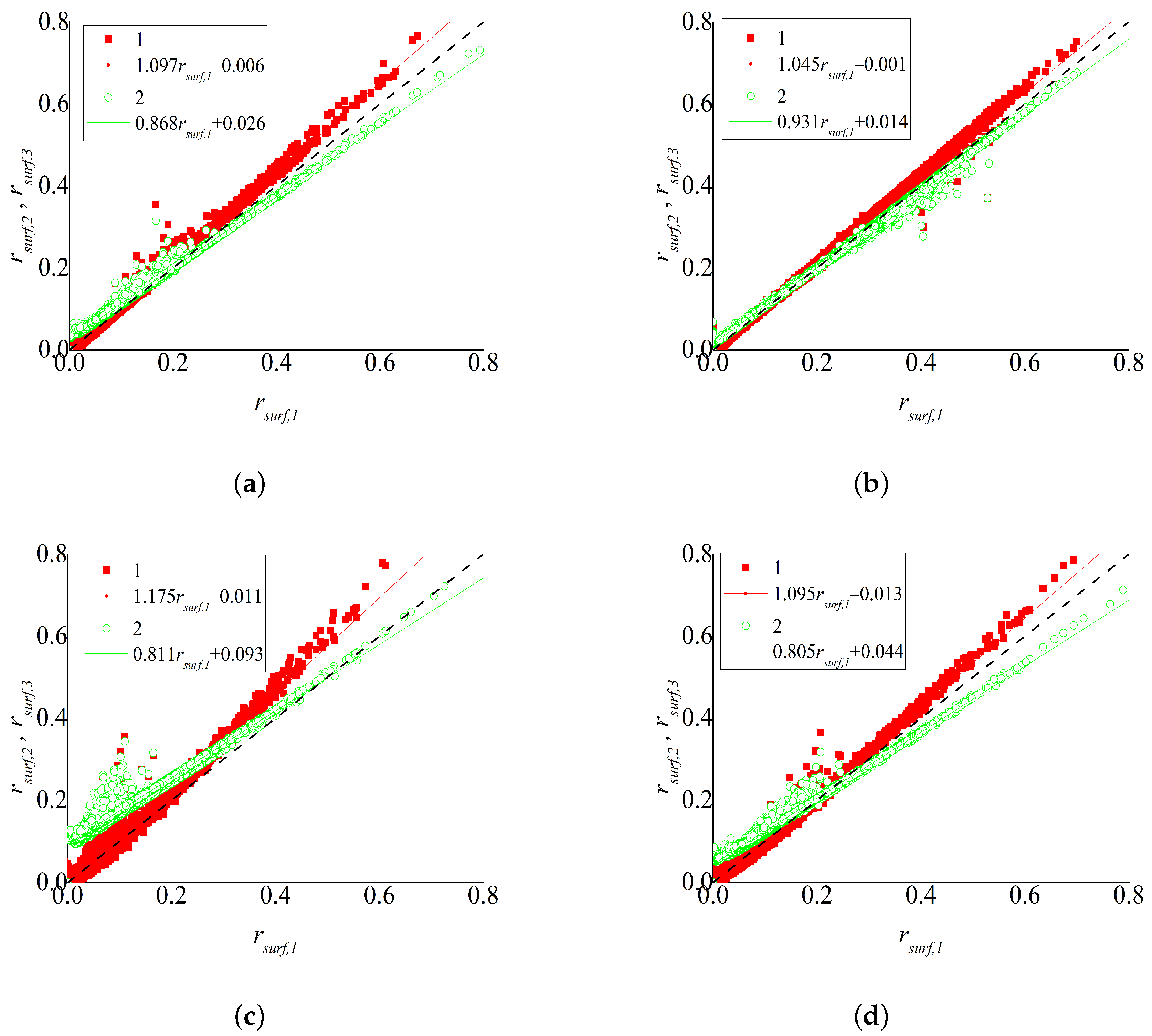
3. Algorithm Validation against Ground-Based Measurements
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Description of Atmospheric Models
Appendix B. Monte Carlo Algorithms
References
- Otterman, J.; Fraser, R.S. Adjacency effects on imaging by surface reflection and atmospheric scattering: Cross radiance to zenith. Appl. Opt. 1979, 18, 2852–2860. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Turbid wakes associated with offshore wind turbines observed with Landsat 8. Remote Sens. Environ. 2014, 145, 105–115. [Google Scholar] [CrossRef]
- Cox, C.; Munk, W. Measurement of the Roughness of the Sea Surface from Photographs of the Sun’s Glitter. J. Opt. Soc. Am. 1954, 44, 838–850. [Google Scholar] [CrossRef]
- Warren, M.A.; Simis, S.G.H.; Martinez-Vicente, V.; Poser, K.; Bresciani, M.; Alikas, K.; Spyrakos, E.; Giardino, C.; Ansper, A. Assessment of atmospheric correction algorithms for the Sentinel-2A MultiSpectral Imager over coastal and inland waters. Remote Sens. Environ. 2019, 225, 267–289. [Google Scholar] [CrossRef]
- Wang, J.; Wang, Y.; Lee, Z.; Wang, D.; Chen, S.; Lai, W. A revision of NASA SeaDAS atmospheric correction algorithm over turbid waters with artificial Neural Networks estimated remote-sensing reflectance in the near-infrared. ISPRS J. Photogramm. Remote Sens. 2022, 194, 235–249. [Google Scholar] [CrossRef]
- Tanre, D.; Herman, M.; Deschamps, P.Y.; de Leffe, A. Atmospheric modeling for space measurements of ground reflectances, including bidirectional properties. Appl. Opt. 1979, 18, 3587–3594. [Google Scholar] [CrossRef] [PubMed]
- Putsay, M. A simple atmospheric correction method for the short wave satellite images. International J. Remote Sens. 1992, 13, 1549–1558. [Google Scholar] [CrossRef]
- Berk, A.; Adler-Golden, S.M.; Ratkowski, A.J.; Felde, G.W.; Anderson, G.P.; Hoke, M.L.; Cooley, T.; Chetwynd, J.H.; Gardne, J.A.; Matthew, M.W.; et al. Exploiting MODTRAN radiation transport for atmospheric correction: The FLAASH algorithm. In Proceedings of the Fifth International Conference on Information Fusion. FUSION 2002 (IEEE Cat.No.02EX5997), Annapolis, MD, USA, 8–11 July 2002; pp. 798–803. [Google Scholar]
- Vermote, E.F.; Vermeulen, A. Atmospheric Correction Algorithm: Spectral Reflectances (MOD09). Algorithm Theoretical Background Document, Version 4.0. 1999. Available online: http://modis.gsfc.nasa.gov/data/atbd/atbd_mod08.pdf (accessed on 30 January 2023).
- Lyapustin, A.; Wang, Y.; Korkin, S.; Huang, D. MODIS Collection 6 MAIAC algorithm. Atmos. Meas. Tech. 2018, 11, 5741–5765. [Google Scholar] [CrossRef]
- Reinersman, P.N.; Carder, K.L. Monte Carlo simulation of the atmospheric point-spread function with an application to correction for the adjacency effect. Appl. Opt. 1995, 34, 4453–4471. [Google Scholar] [CrossRef]
- Katkovsky, L.V.; Martinov, A.O.; Siliuk, V.A.; Ivanov, D.A.; Kokhanovsky, A.A. Fast Atmospheric Correction Method for Hyperspectral Data. Remote Sens. 2018, 10, 1698. [Google Scholar] [CrossRef]
- Shi, H.; Xiao, Z. The 4SAILT Model: An Improved 4SAIL Canopy Radiative Transfer Model for Sloping Terrain. IEEE Trans. Geosci. Remote Sens. 2021, 59, 5515–5525. [Google Scholar] [CrossRef]
- Tanre, D.; Holben, B.N.; Kaufman, Y.J. Atmospheric correction algorithm for NOAA-AVHRR products: Theory and application. IEEE Trans. Geosci. Remote Sens. 1992, 30, 231–248. [Google Scholar] [CrossRef]
- Zimovaya, A.V.; Tarasenkov, M.V.; Belov, V.V. Radiation Polarization Effect on the Retrieval of the Earth’s Surface Reflection Coefficient from Satellite Data in the Visible Wavelength Range. Atmos. Ocean. Opt. 2018, 31, 131–136. [Google Scholar] [CrossRef]
- Kotchenova, S.Y.; Vermote, E.F.; Matarrese, R.; Klemm, F.J. Validation of a vector version of the 6S radiative transfer code for atmospheric correction of satellite data. Part I: Path radiance. Appl. Opt. 2006, 45, 6762–6774. [Google Scholar] [CrossRef]
- Cahalan, R.F.; Oreopoulos, L.; Wen, G.; Marshak, A.; Tsay, S.-C.; DeFelice, T. Cloud characterization and clear-sky correction from Landsat-7. Remote Sens. Environ. 2002, 78, 83–98. [Google Scholar] [CrossRef]
- Wen, G.; Marshak, A.; Cahalan, R.F.; Remer, L.A.; Kleidman, R.G. 3-D aerosol-cloud radiative interaction observed in collocated MODIS and ASTER images of cumulus cloud fields. J. Geophys. Res. 2007, 112, D13204. [Google Scholar] [CrossRef]
- Varnai, T.; Marshak, A. MODIS observations of enhanced clear sky reflectance near clouds. Geophys. Res. Lett. 2009, 36, L06807. [Google Scholar] [CrossRef]
- Marshak, A.; Evans, K.F.; Varnai, T.; Wen, G. Extending 3D near-cloud corrections from shorter to longer wavelengths. J. Quant. Spectrosc. Radiat. Transf. 2014, 147, 79–85. [Google Scholar] [CrossRef]
- Tarasenkov, M.V.; Engel, M.V.; Zonov, M.N.; Belov, V.V. Assessing the Cloud Adjacency Effect on Retrieval of the Ground Surface Reflectance from MODIS Satellite Data for the Baikal Region. Atmosphere 2022, 13, 2054. [Google Scholar] [CrossRef]
- Richter, R.; Schläpfer, D. ATCOR-2/3 User Guide; ReSe Applications Schläpfer: Wil, Switzerland, 2012; p. 203. [Google Scholar]
- Craig J., M. Performance assessment of ACORN atmospheric correction algorithm. In Proceedings of the SPIE 4725, Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery VIII, AeroSense 2002, Orlando, FL, USA, 2 August 2002. [Google Scholar] [CrossRef]
- Gao, B.-C.; Heidebrecht, K.B.; Goetz, A.F.H. Atmosphere Removal Program (ATREM) Version 3.1 Users Guide; Center for the Study of Earth from Space (CSES), Cooperative Institute for Research in Environmental Sciences (CIRES), University of Colorado: Boulder, CO, USA, 1996. [Google Scholar]
- Adler-Golden, S.M.; Matthew, M.W.; Bernstein, L.S.; Levine, R.Y.; Berk, A.; Richtsmeier, S.C.; Acharya, P.K.; Anderson, G.P.; Felde, J.W.; Gardner, J.A.; et al. Atmospheric correction for shortwave spectral imagery based on MODTRAN4. Proc. SPIE Imaging Spectrom. V 1999, 3753. [Google Scholar] [CrossRef]
- Qu, Z.; Kindel, B.C.; Goetz, A.F.H. The High Accuracy Atmospheric Correction for Hyperspectral Data (HATCH) model. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1223–1231. [Google Scholar]
- Tarasenkov, M.V.; Zimovaya, A.V.; Belov, V.V.; Engel, M.V. Retrieval of Reflection Coefficients of the Earth’s Surface from MODIS Satellite Measurements Considering Radiation Polarization. Atmos. Ocean. Opt. 2020, 33, 179–187. [Google Scholar] [CrossRef]
- Cerasoli, S.; Campagnolo, M.; Faria, J.; Nogueira, C.; Caldeira, M.D.C. On estimating the gross primary productivity of Mediterranean grasslands under different fertilization regimes using vegetation indices and hyperspectral reflectance. Biogeosciences 2018, 15, 5455–5471. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.O.; Breon, F.-M. Towards a Generalized Approach for Correction of the BRDF Effect in MODIS Directional Reflectances. IEEE Trans. Geosci. Remote Sens. 2009, 47, 898–908. [Google Scholar] [CrossRef]
- Roujean, J.-L.; Leroy, M.; Deschamps, P.-Y. A bidirectional reflectance model of the Earth’s surface for the correction of remote sensing data. J. Geophys. Res. 1992, 97, 20455–20468. [Google Scholar] [CrossRef]
- Rahman, H.; Pinty, B.; Verstraete, M.M. Coupled surface-atmosphere reflectance (CSAR) model: 2. Semiempirical surface model usable with NOAA advanced very high resolution radiometer data. J. Geophys. Res. 1993, 98, 20791–20801. [Google Scholar] [CrossRef]
- Verhoef, W.; Bach, H. Remote sensing data assimilation using coupled radiative transfer models. Phys. Chem. Earth Parts A/B/C 2003, 28, 3–13. [Google Scholar] [CrossRef]
- Maignan, F.; Breon, F.-M.; Lacaze, R. Bidirectional reflectance of Earth targets: Evaluation of analytical models using a large set of spaceborne measurements with emphasis on the Hot Spot. Remote Sens. Environ. 2004, 90, 210–220. [Google Scholar] [CrossRef]
- Mousivand, A.; Verhoef, W.; Menenti, M.; Gorte, B. Modeling Top of Atmosphere Radiance over Heterogeneous Non-Lambertian Rugged Terrain. Remote Sens. 2015, 7, 8019–8044. [Google Scholar] [CrossRef]
- Jia, W.; Pang, Y.; Tortini, R.; Schlapfer, D.; Li, Z.; Roujean, J.-L. A Kernel-Driven BRDF Approach to Correct Airborne Hyperspectral Imagery over Forested Areas with Rugged Topography. Remote Sens. 2020, 12, 33. [Google Scholar] [CrossRef]
- NOAA National Centers for Environmental Information. 2022: ETOPO 2022 15 Arc-Second Global Relief Model. NOAA National Centers for Environmental Information. Available online: https://data.noaa.gov/metaview/page?xml=NOAA/NESDIS/NGDC/MGG/DEM//iso/xml/etopo_2022.xml&view=getDataView&header=none (accessed on 30 January 2023).
- Supplementary Material. Available online: https://github.com/MarinaEngel/Atmosphere_2023 (accessed on 31 January 2023).
- Tarasenkov, M.V.; Belov, V.V.; Engel, M.V. Algorithm for reconstruction of the Earth surface reflectance from Modis satellite measurements in a turbid atmosphere. In Proceedings of the SPIE 10833, 24th International Symposium on Atmospheric and Ocean Optics: Atmospheric Physics, Tomsk, Russia, 2–5 July 2018; Volume 10833, pp. 1–16. [Google Scholar]
- Kneizys, F.X.; Robertson, D.C.; Abreu, L.W.; Acharya, P.; Anderson, G.P.; Rothman, L.S.; Chetwynd, J.H.; Selby, J.E.A.; Shettle, E.P.; Gallery, W.O.; et al. The MODTRAN 2/3 Report and LOWTRAN 7 Model; U.S. Air Force Geophysics Laboratory: Hanscom, MA, USA, 1996. [Google Scholar]
- Bucholtz, A. Rayleigh-scattering calculations for the terrestrial atmosphere. Appl. Opt. 1995, 34, 2765–2773. [Google Scholar] [CrossRef] [PubMed]
- HITRAN Database. Available online: https://hitran.org/ (accessed on 30 January 2023).
- Belov, V.V.; Tarasenkov, M.V. Statistical Modeling of the Point Spread Function in the Spherical Atmosphere and a Criterion for Detecting Image Isoplanarity Zones. Atmos. Ocean. Opt. 2010, 23, 441–447. [Google Scholar] [CrossRef]
- Marchuk, G.I.; Mikhailov, G.A.; Nazaraliev, M.A.; Darbinjan, R.A.; Kargin, B.A.; Elepov, B.S. The Monte Carlo Methods in Atmospheric Optics; Springer: Berlin/Heidelberg, Germany, 1980. [Google Scholar]
- Coulson, K.; Dave, J.; Sekera, Z. Tables Related to Radiation Emerging from a Planetary Atmosphere with Rayleigh Scattering; University of California Press: Berkeley, CA, USA, 1960; pp. 56–58. [Google Scholar]
- Mekler, Y.; Kaufman, Y.J. Contrast reduction by the atmosphere and retrieval of nonuniform surface reflectance. Appl. Opt. 1982, 21, 310–316. [Google Scholar] [CrossRef] [PubMed]
- Lenoble, J. Radiative Transfer in Scattering and Absorbing Atmospheres: Standard Computational Procedures; Deepak, A., Ed.; American Meteorological Society: Boston, MA, USA, 1985; p. 314. [Google Scholar]
- Lenoble, J. Modeling of the Influence of Snow Reflectance on Ultraviolet Irradiance for Cloudless Sky. Appl. Opt. 1998, 37, 2441–2447. [Google Scholar] [CrossRef]
- International Working Group on Polarized Radiative Transfer (IPRT). Available online: https://www.meteo.physik.uni-muenchen.de/~iprt/doku.php?id=start (accessed on 30 January 2023).
- Radiometric Calibration Network Portal. Available online: https://www.radcalnet.org/ (accessed on 30 January 2023).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Authors/Reference | |||||||
|---|---|---|---|---|---|---|---|---|
| Putsay | Tanre | Berk | Vermote | Lyapustin | Reinersman | Katkovskiy | Shi | |
| [7] | [6] | [8] | [9] | [10] | [11] | [12] | [13] | |
| Surface | Non- | Non- | Non- | Non- | ||||
| model | Lamb | Lamb | Lamb | Lamb | Lamb | Lamb | Lamb | Lamb |
| Adjacency | ||||||||
| effect | accurate | accurate | approx. | approx. | accurate | accurate | approx. | approx. |
| Multiple | ||||||||
| reflection | No | approx. | approx. | approx. | approx. | approx. | approx. | approx. |
| Molecular | ||||||||
| absorption | accurate | accurate | accurate | accurate | accurate | accurate | approx. | accurate |
| Polarization | No | No | No | Yes | Yes | No | No | No |
| Topography | No | No | No | No | No | No | No | Yes |
| MODIS Band | ||||||||
|---|---|---|---|---|---|---|---|---|
| Date | 1 | 2 | 3 | 4 | ||||
| SD | SD | SD | SD | |||||
| 1 April 2016 | 0.0425 | 0.0060 | 0.4295 | 0.0616 | 0.0228 | 0.0030 | 0.0686 | 0.0059 |
| 25 April 2016 | 0.0414 | 0.0092 | 0.3818 | 0.0533 | 0.0192 | 0.0051 | 0.0573 | 0.0077 |
| 20 May 2016 | 0.0659 | 0.0128 | 0.3175 | 0.0521 | 0.0275 | 0.0057 | 0.0661 | 0.0092 |
| 3 June 2016 | 0.0823 | 0.0176 | 0.2857 | 0.0512 | 0.0336 | 0.0098 | 0.0737 | 0.0127 |
| MODIS Band | Date | Proposed Algorithm | MOD09 Algorithm | Algorithm without Atmospheric Correction |
|---|---|---|---|---|
| 1 | 1 April 2016 | 0.015 | 0.015 | 0.027 |
| 1 | 25 April 2016 | 0.014 | 0.016 | 0.044 |
| 1 | 20 May 2016 | −0.020 | 0.007 | 0.032 |
| 1 | 3 June 2016 | 0.008 | 0.007 | 0.031 |
| 2 | 1 April 2016 | −0.195 | −0.197 | −0.196 |
| 2 | 25 April 2016 | 0.003 | −0.027 | −0.032 |
| 2 | 20 May 2016 | 0.067 | 0.024 | 0.014 |
| 2 | 3 June 2016 | 0.052 | 0.044 | 0.033 |
| 3 | 1 April 2016 | 0.008 | 0.006 | 0.080 |
| 3 | 25 April 2016 | 0.013 | 0.011 | 0.152 |
| 3 | 20 May 2016 | −0.014 | 0.012 | 0.154 |
| 3 | 3 June 2016 | 0.015 | 0.016 | 0.144 |
| 4 | 1 April 2016 | −0.015 | −0.013 | 0.012 |
| 4 | 25 April 2016 | 0.014 | 0.016 | 0.065 |
| 4 | 20 May 2016 | −0.023 | 0.014 | 0.061 |
| 4 | 3 June 2016 | 0.005 | 0.017 | 0.060 |
| MODIS Band | Date | Proposed Algorithm | MOD09 Algorithm | Algorithm without Atmospheric Correction |
|---|---|---|---|---|
| 1 | 1 April 2016 | 9.00 | −4.80 | 0.020 |
| 1 | 25 April 2016 | 0.023 | 0.024 | 0.040 |
| 1 | 20 May 2016 | 0.013 | 0.014 | 0.027 |
| 1 | 3 June 2016 | 0.009 | 0.003 | 0.023 |
| 2 | 1 April 2016 | −0.114 | −0.140 | −0.142 |
| 2 | 25 April 2016 | −0.064 | −0.059 | −0.064 |
| 2 | 20 May 2016 | −0.006 | −0.028 | −0.035 |
| 2 | 3 June 2016 | 0.055 | 0.034 | 0.026 |
| 3 | 1 April 2016 | −0.001 | 2.20 | 0.086 |
| 3 | 25 April 2016 | 0.011 | 0.017 | 0.103 |
| 3 | 20 May 2016 | 0.008 | 0.015 | 0.092 |
| 3 | 3 June 2016 | 0.016 | 0.013 | 0.112 |
| 4 | 1 April 2016 | −0.013 | −0.014 | 0.018 |
| 4 | 25 April 2016 | 0.010 | 0.016 | 0.045 |
| 4 | 20 May 2016 | 0.005 | 0.012 | 0.037 |
| 4 | 3 June 2016 | 0.011 | 0.013 | 0.047 |
| MODIS | No Correction | Proposed Algorithm | ||||
|---|---|---|---|---|---|---|
| Band | r | SD | r | SD | ||
| AQUA | ||||||
| 1 | 0.997 | 0.008 | 0.014 | 0.997 | 0.007 | 0.006 |
| 2 | 0.999 | 0.006 | 0.009 | 0.994 | 0.009 | 0.017 |
| 3 | 0.975 | 0.014 | 0.081 | 0.987 | 0.012 | 0.009 |
| 4 | 0.993 | 0.009 | 0.025 | 0.994 | 0.007 | 0.007 |
| TERRA | ||||||
| 1 | 0.986 | 0.010 | 0.010 | 0.984 | 0.006 | 0.004 |
| 2 | 0.999 | 0.005 | 0.003 | 0.985 | 0.015 | 0.007 |
| 3 | 0.734 | 0.052 | 0.060 | 0.948 | 0.009 | 0.005 |
| 4 | 0.948 | 0.018 | 0.020 | 0.963 | 0.008 | 0.006 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tarasenkov, M.V.; Belov, V.V.; Engel, M.V.; Zimovaya, A.V.; Zonov, M.N.; Bogdanova, A.S. Algorithm for the Reconstruction of the Ground Surface Reflectance in the Visible and Near IR Ranges from MODIS Satellite Data with Allowance for the Influence of Ground Surface Inhomogeneity on the Adjacency Effect and of Multiple Radiation Reflection. Remote Sens. 2023, 15, 2655. https://doi.org/10.3390/rs15102655
Tarasenkov MV, Belov VV, Engel MV, Zimovaya AV, Zonov MN, Bogdanova AS. Algorithm for the Reconstruction of the Ground Surface Reflectance in the Visible and Near IR Ranges from MODIS Satellite Data with Allowance for the Influence of Ground Surface Inhomogeneity on the Adjacency Effect and of Multiple Radiation Reflection. Remote Sensing. 2023; 15(10):2655. https://doi.org/10.3390/rs15102655
Chicago/Turabian StyleTarasenkov, Mikhail V., Vladimir V. Belov, Marina V. Engel, Anna V. Zimovaya, Matvei N. Zonov, and Alexandra S. Bogdanova. 2023. "Algorithm for the Reconstruction of the Ground Surface Reflectance in the Visible and Near IR Ranges from MODIS Satellite Data with Allowance for the Influence of Ground Surface Inhomogeneity on the Adjacency Effect and of Multiple Radiation Reflection" Remote Sensing 15, no. 10: 2655. https://doi.org/10.3390/rs15102655
APA StyleTarasenkov, M. V., Belov, V. V., Engel, M. V., Zimovaya, A. V., Zonov, M. N., & Bogdanova, A. S. (2023). Algorithm for the Reconstruction of the Ground Surface Reflectance in the Visible and Near IR Ranges from MODIS Satellite Data with Allowance for the Influence of Ground Surface Inhomogeneity on the Adjacency Effect and of Multiple Radiation Reflection. Remote Sensing, 15(10), 2655. https://doi.org/10.3390/rs15102655