
A Novel Edge Detection Method for Multi-Temporal PolSAR Images Based on the SIRV Model and a SDAN-Based 3D Gaussian-like Kernel


Abstract
:1. Introduction
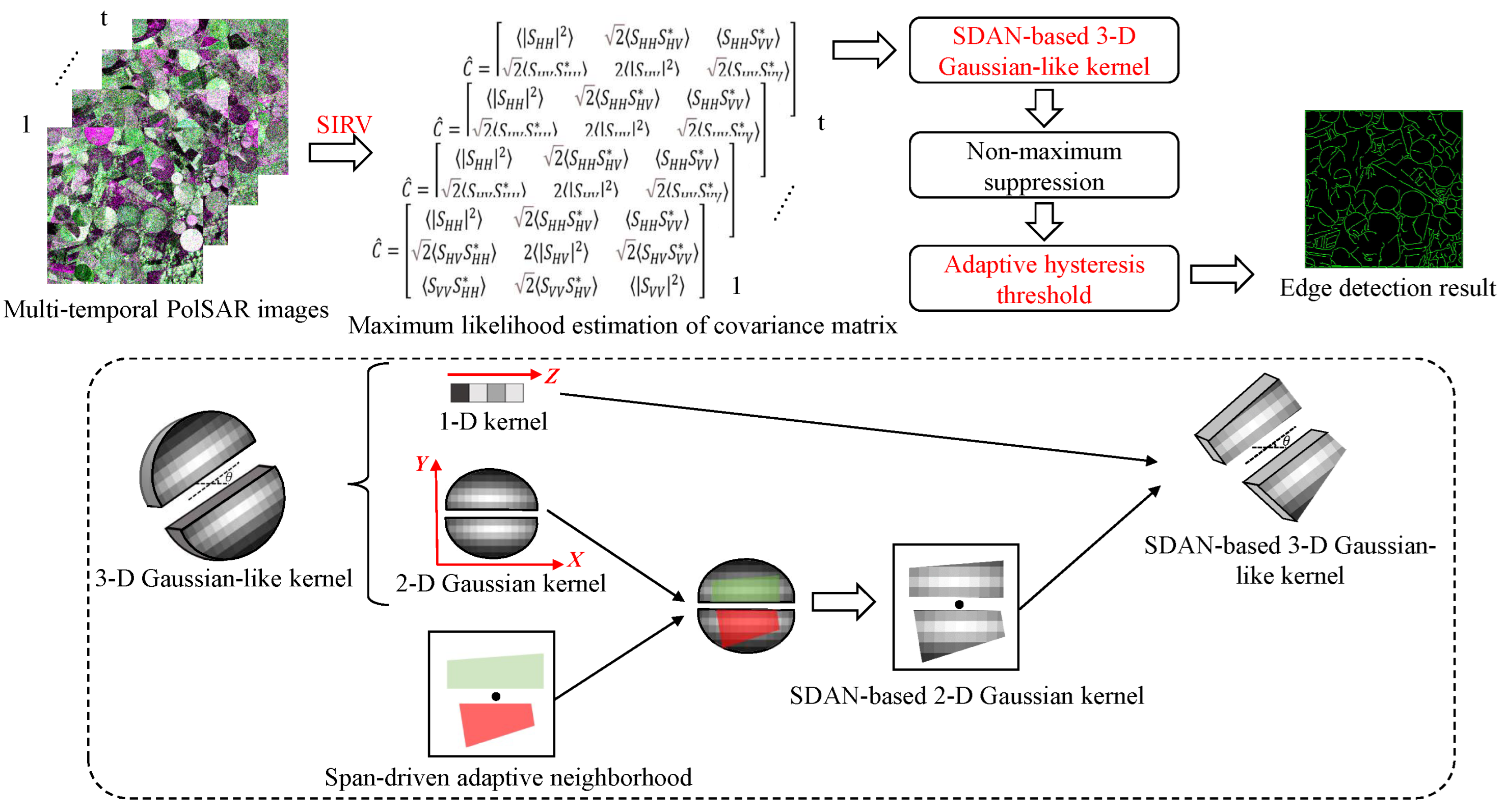
2. Methodology
- (1)
- The Wishart distribution is not suitable for heterogeneous regions of PolSAR images, thus failing to accurately estimate the ACM.
- (2)
- The rectangular window does not ensure all internal pixels are homogeneous, which also leads to an inaccurate ACM estimation.
- (3)
- The rectangular kernel assigns equal weight to all pixels, which ignores the important fact that the information contained in the pixels near the centre pixel is more important than that at other pixels.
- (4)
- The method requires the use of hysteresis thresholds to eliminate noise edges, and the values of the hysteresis thresholds usually need to be adjusted repeatedly by experiment, increasing the difficulty of hyperparameter estimation.
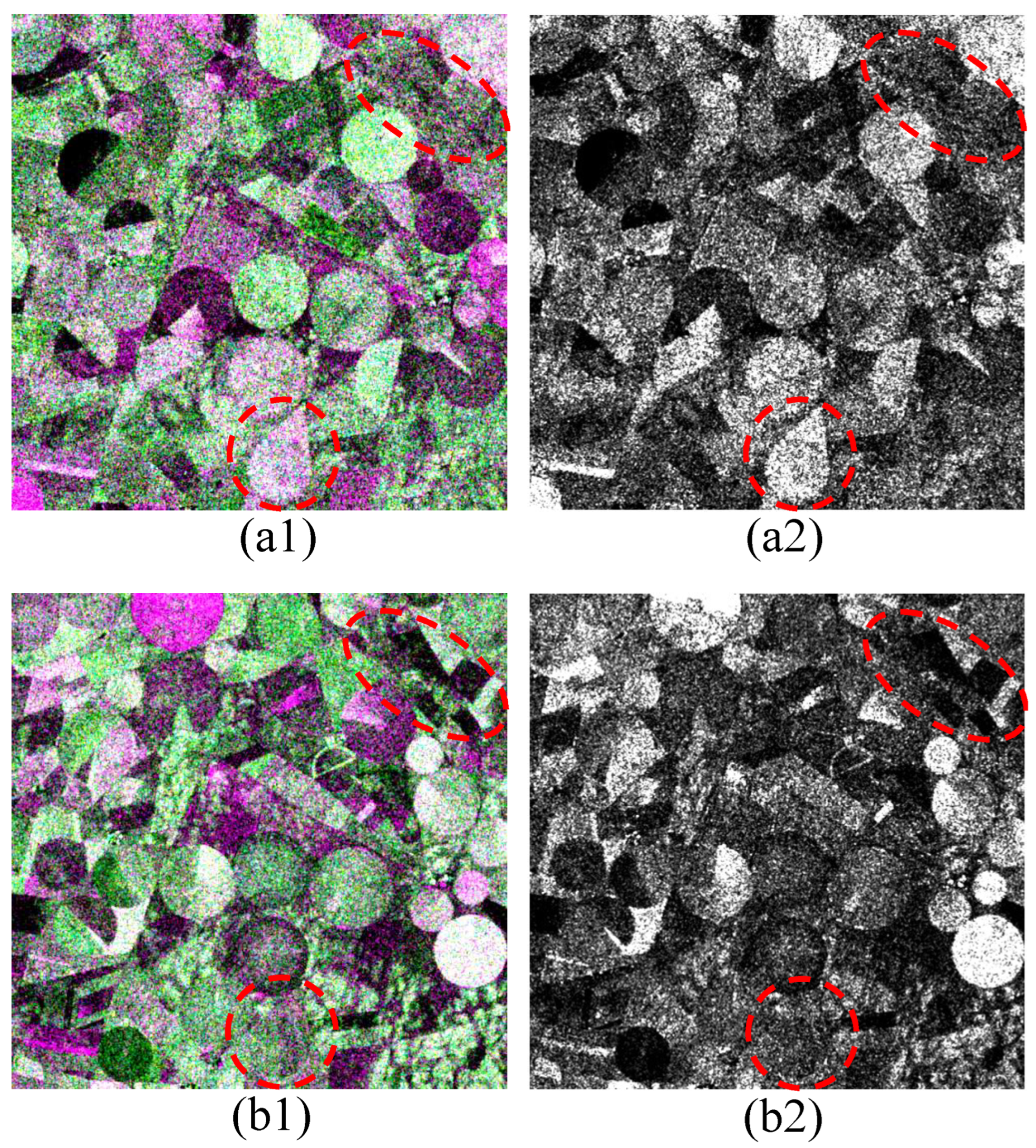
2.1. SIRV-Based PolSAR Representation
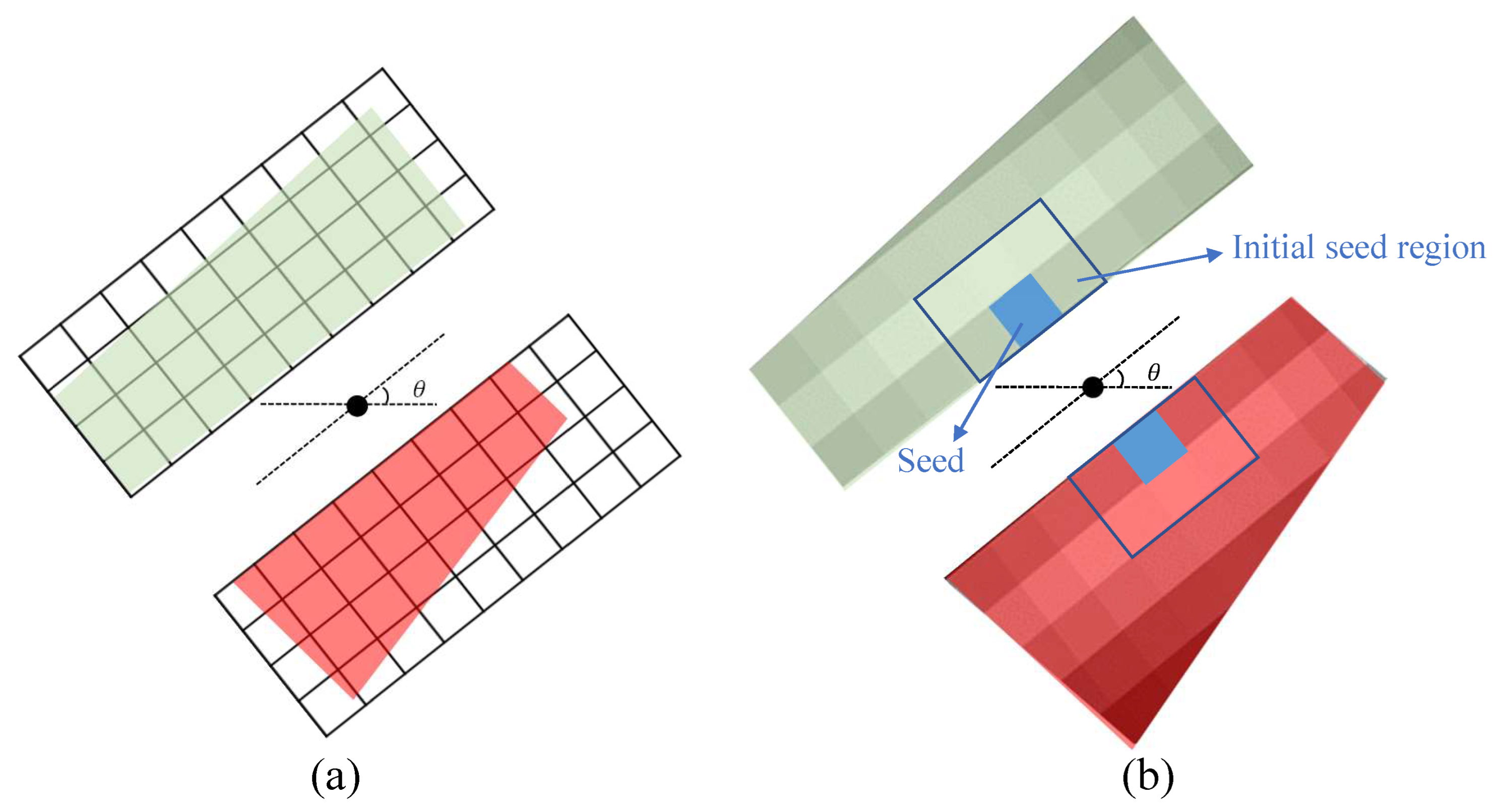
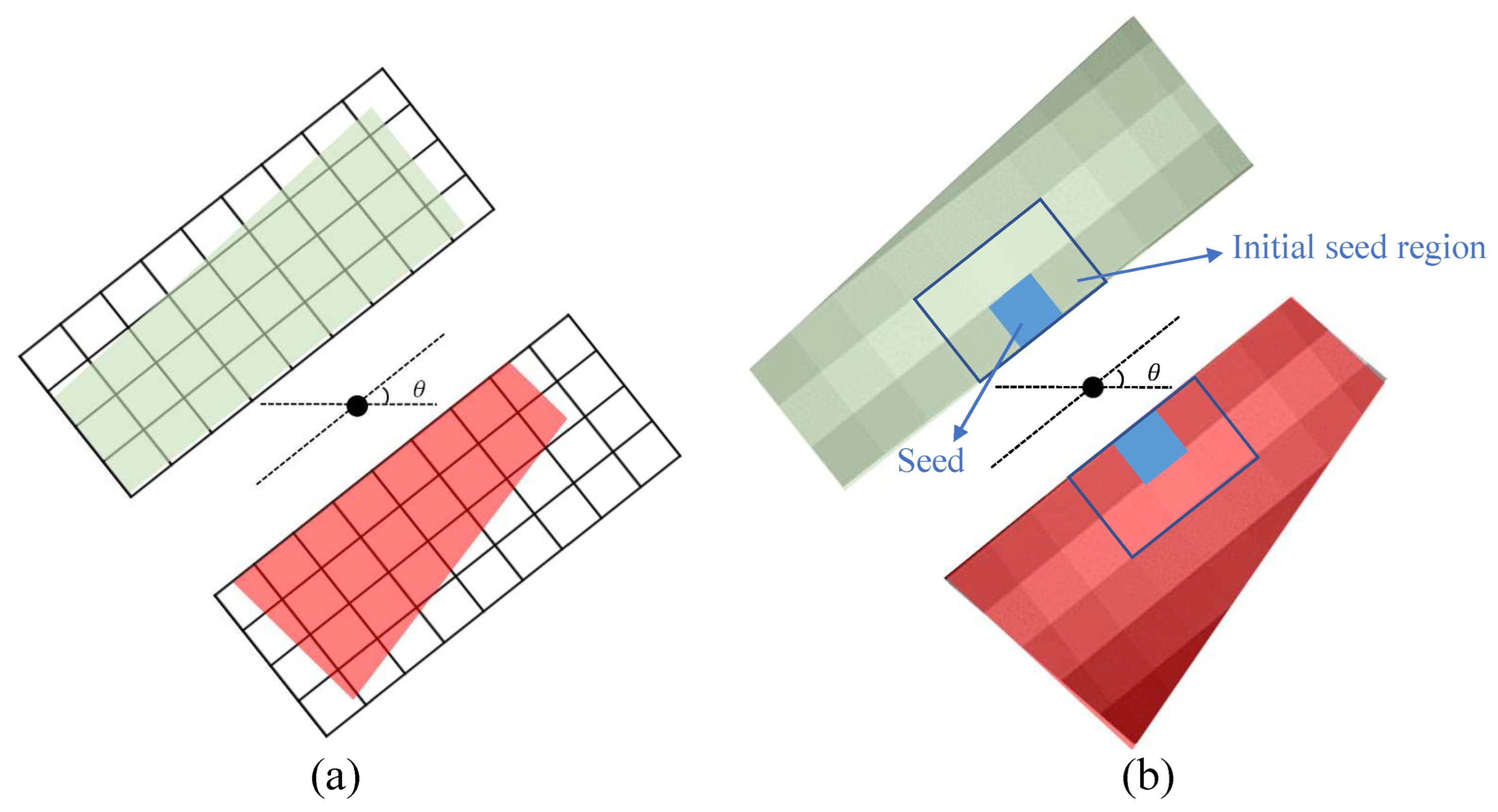
2.2. SDAN-Based Spatial Support
2.3. SDAN-Based 3D Gaussian-like Kernel
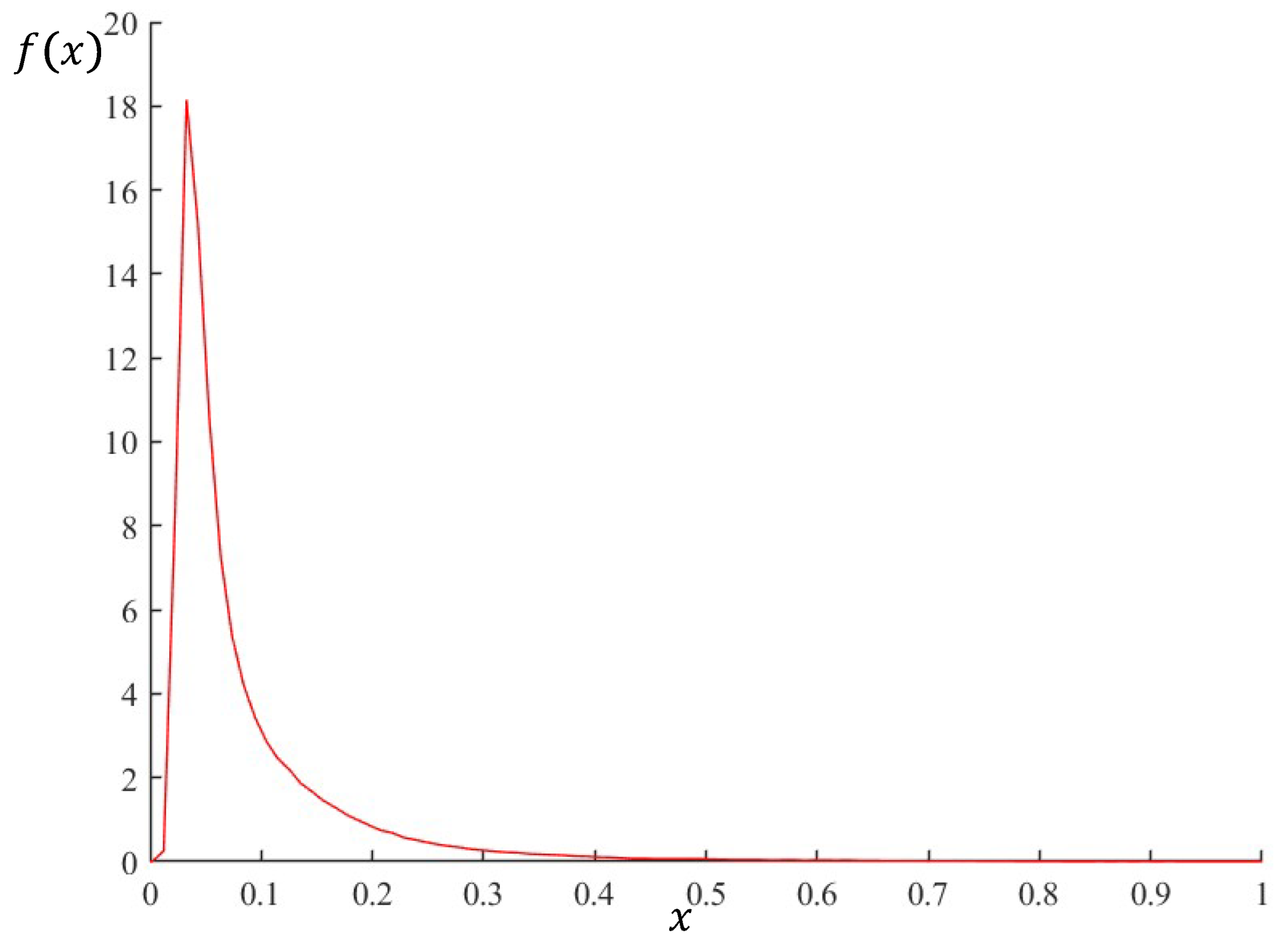
2.4. Adaptive Hysteresis Threshold
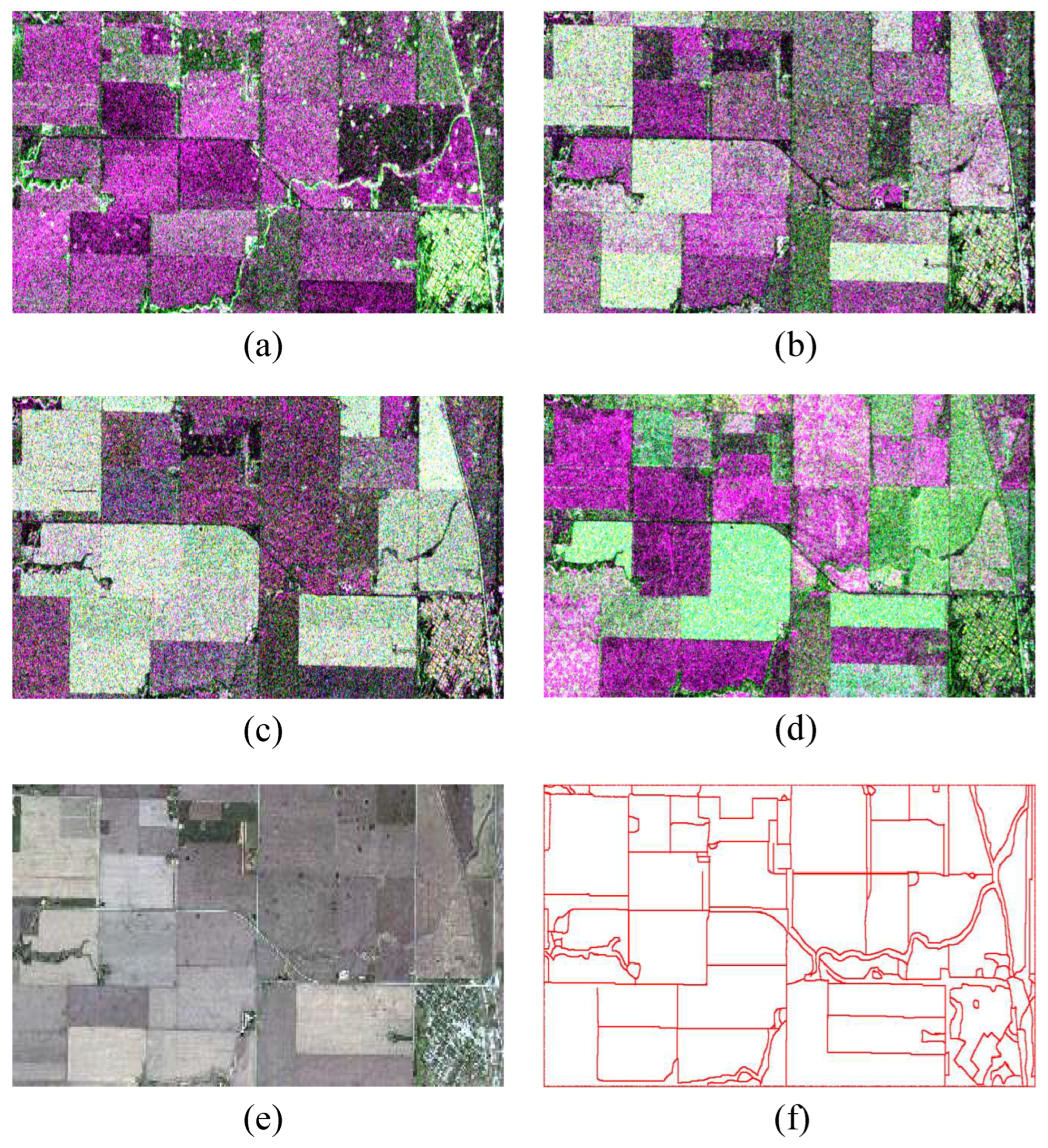
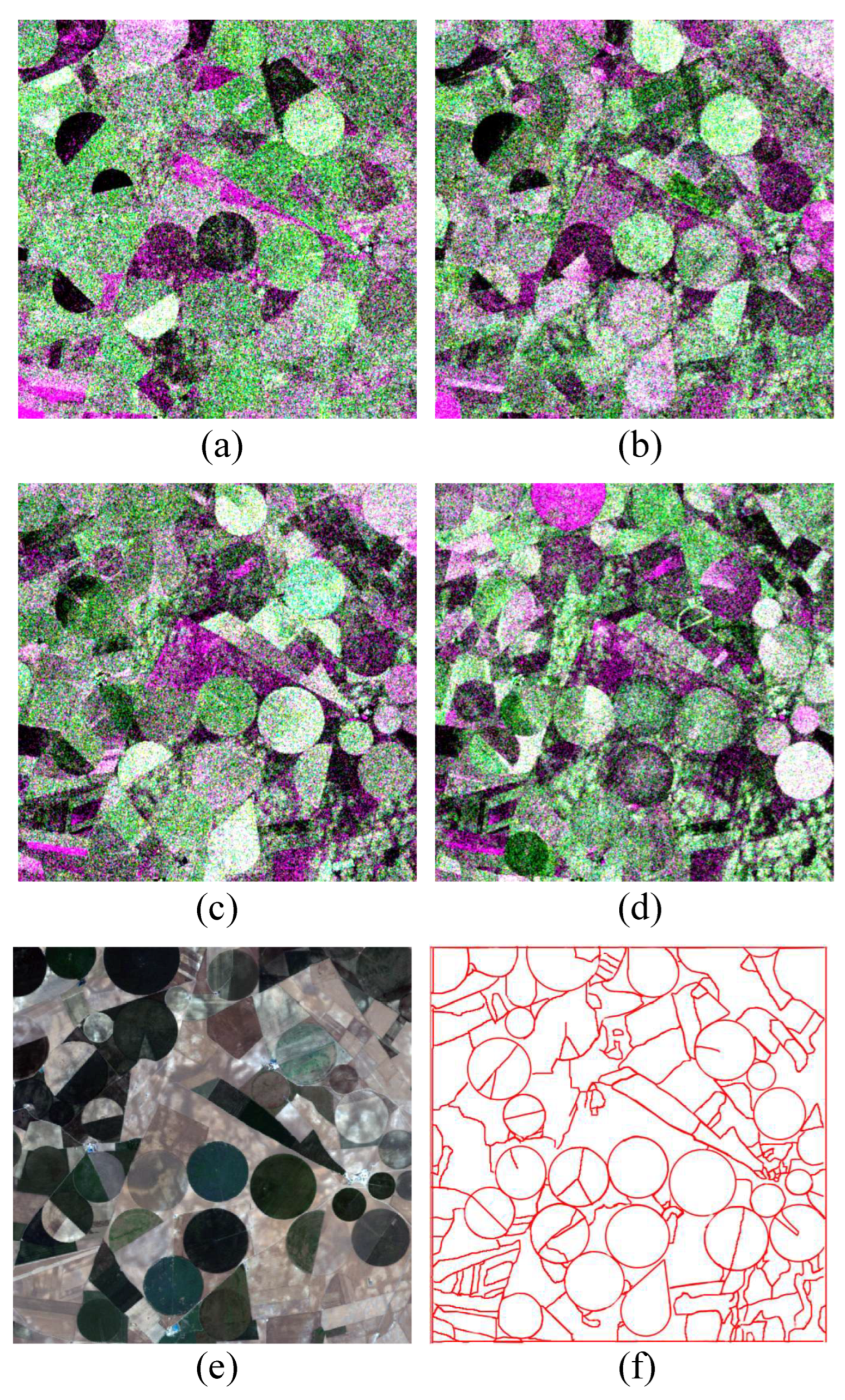
3. Experimental Results
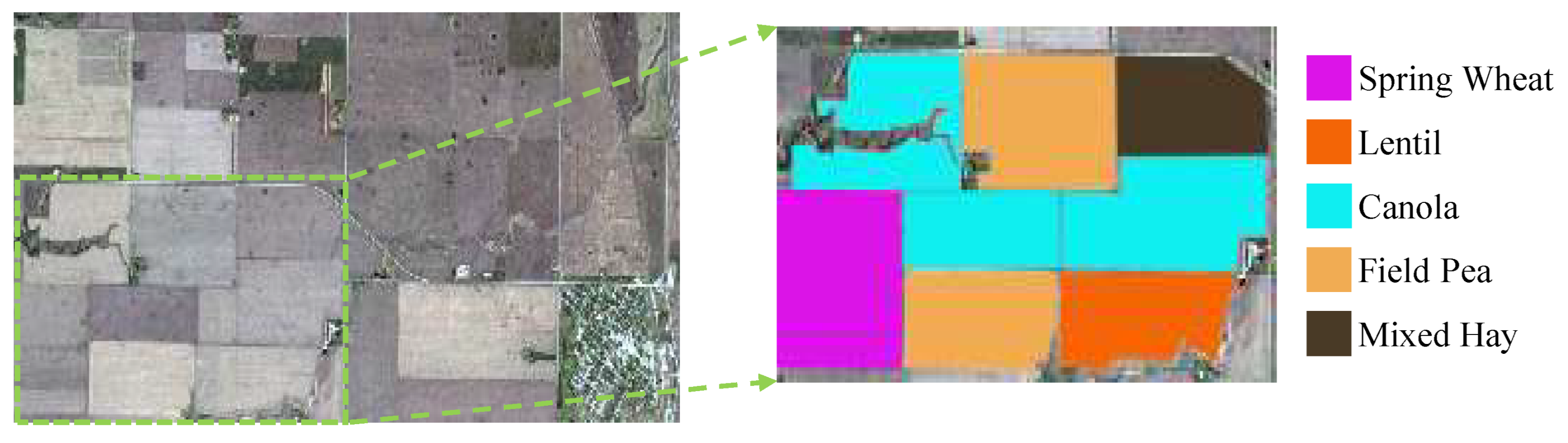
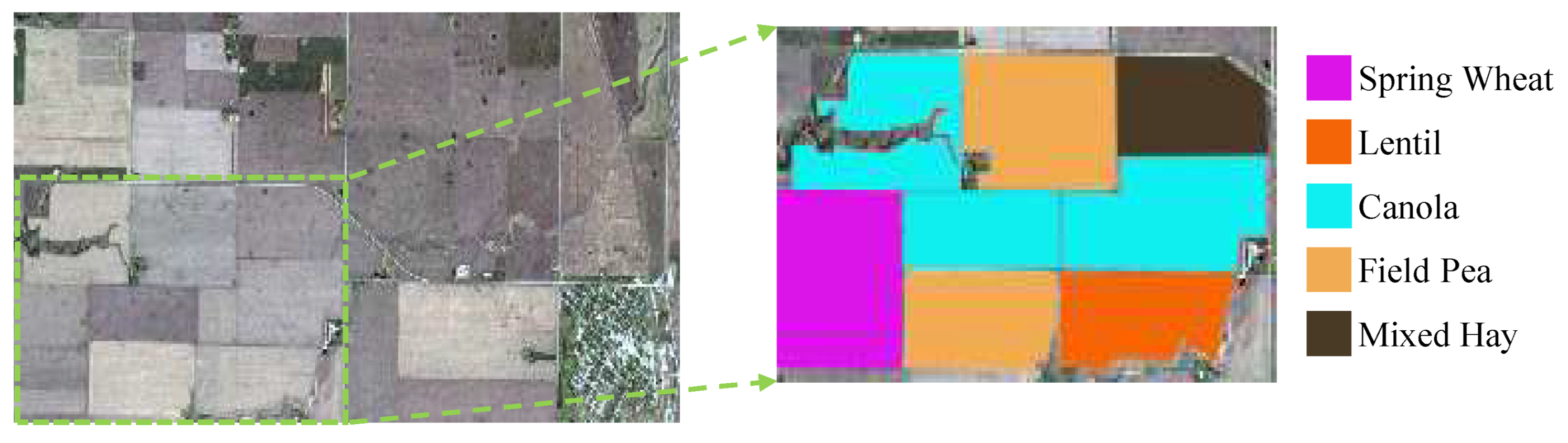
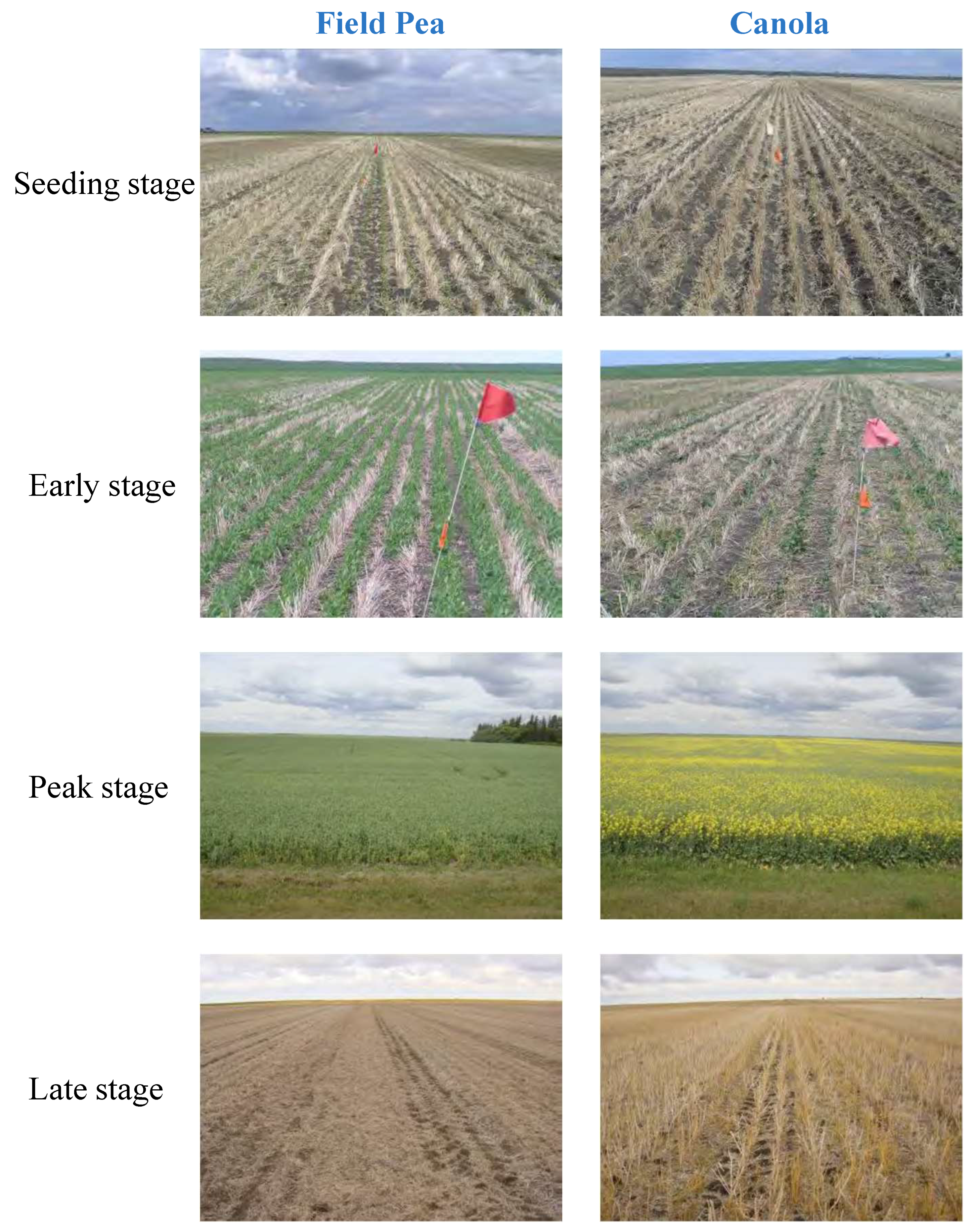
3.1. Data Description and Parameter Settings
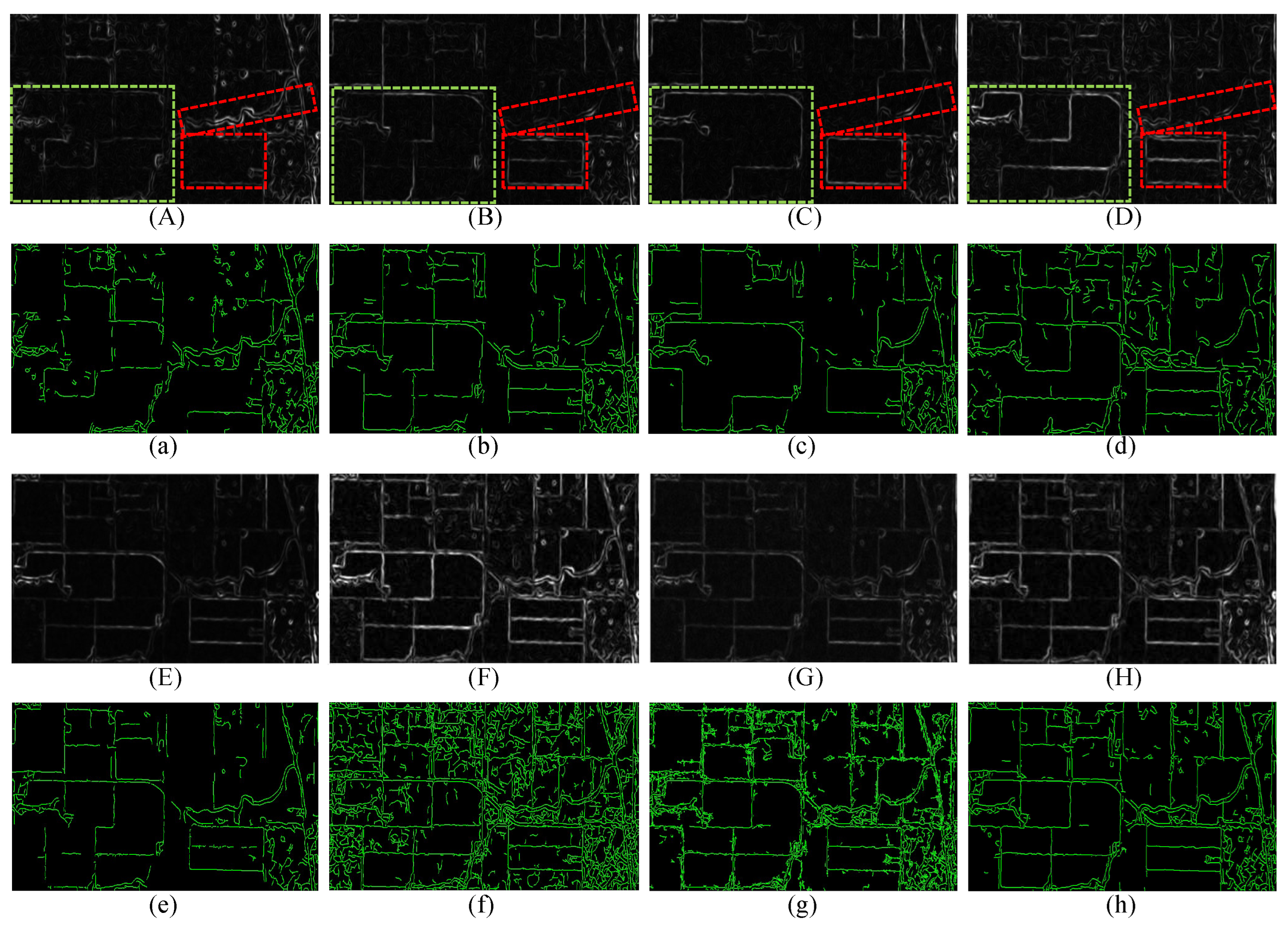
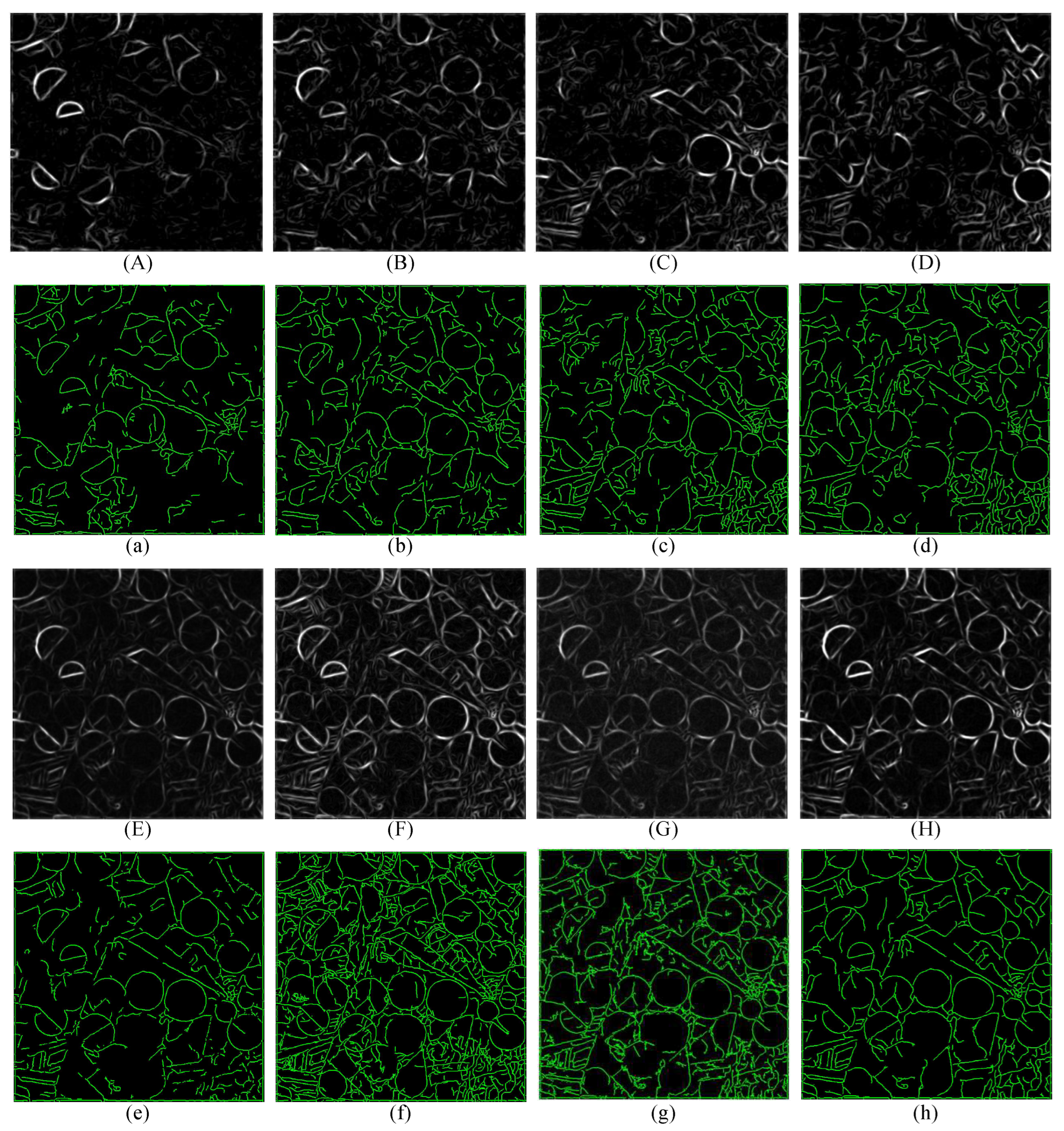
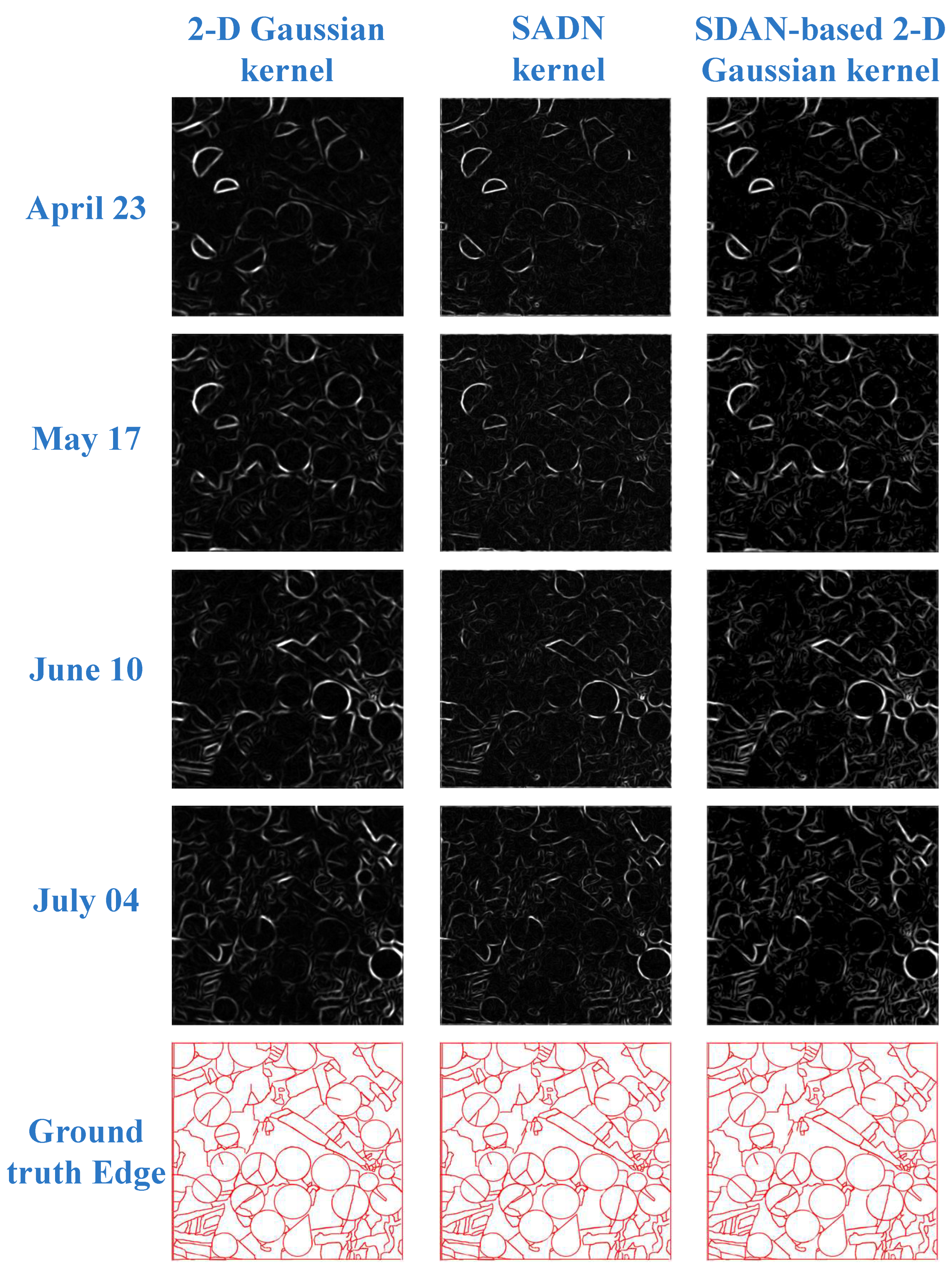
3.2. Edge Detection Reuslts
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cheng, J.; Zhang, F.; Xiang, D.; Yin, Q.; Zhou, Y. PolSAR image classification with multiscale superpixel-based graph convolutional network. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–14. [Google Scholar] [CrossRef]
- Xiang, D.; Wang, W.; Tang, T.; Guan, D.; Quan, S.; Liu, T.; Su, Y. Adaptive statistical superpixel merging with edge penalty for PolSAR image segmentation. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2412–2429. [Google Scholar] [CrossRef]
- Lang, F.; Yang, J.; Li, D. Adaptive-window polarimetric SAR image speckle filtering based on a homogeneity measurement. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5435–5446. [Google Scholar] [CrossRef]
- Cheng, J.; Xiang, D.; Yin, Q.; Zhang, F. A Novel Crop Classification Method Based on the Tensor-GCN for Time-Series PolSAR Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Sun, Y.; Lei, L.; Guan, D.; Wu, J.; Kuang, G.; Liu, L. Image regression with structure cycle consistency for heterogeneous change detection. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Schou, J.; Skriver, H.; Nielsen, A.A.; Conradsen, K. CFAR edge detector for polarimetric SAR images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 20–32. [Google Scholar] [CrossRef]
- Shui, P.L.; Cheng, D. Edge detector of SAR images using Gaussian-Gamma-shaped bi-windows. IEEE Geosci. Remote Sens. Lett. 2012, 9, 846–850. [Google Scholar] [CrossRef]
- Xiang, D.; Ban, Y.; Wang, W.; Tang, T.; Su, Y. Edge detector for polarimetric SAR images using SIRV model and gauss-shaped filter. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1661–1665. [Google Scholar] [CrossRef]
- Wang, W.; Xiang, D.; Ban, Y.; Zhang, J.; Wan, J. Enhanced edge detection for polarimetric SAR images using a directional span-driven adaptive window. Int. J. Remote Sens. 2018, 39, 6340–6357. [Google Scholar] [CrossRef]
- Jin, R.; Yin, J.; Zhou, W.; Yang, J. Improved multiscale edge detection method for polarimetric SAR images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1104–1108. [Google Scholar] [CrossRef]
- Sharma, R.; Panigrahi, R.K. CFAR-based adaptive PolSAR speckle filter. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4895–4905. [Google Scholar] [CrossRef]
- Deng, S.; Zhang, J.; Li, P.; Huang, G. Edge detection from polarimetric SAR images using polarimetric whitening filter. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 448–451. [Google Scholar]
- Nascimento, A.D.; Horta, M.M.; Frery, A.C.; Cintra, R.J. Comparing edge detection methods based on stochastic entropies and distances for PolSAR imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 7, 648–663. [Google Scholar] [CrossRef]
- De Borba, A.A.; Marengoni, M.; Frery, A.C. Fusion of evidences in intensity channels for edge detection in PolSAR images. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1–5. [Google Scholar] [CrossRef]
- Shi, J.; Jin, H.; Xiao, Z. A novel hybrid edge detection method for polarimetric SAR images. IEEE Access 2020, 8, 8974–8991. [Google Scholar] [CrossRef]
- Barnard, T.J.; Weiner, D.D. Non–Gaussian clutter modeling with generalized spherically invariant random vectors. IEEE Trans. Signal Process. 1996, 44, 2384–2390. [Google Scholar] [CrossRef]
- Heydari, S.S.; Mountrakis, G. Effect of classifier selection, reference sample size, reference class distribution and scene heterogeneity in per-pixel classification accuracy using 26 Landsat sites. Remote Sens. Environ. 2018, 204, 648–658. [Google Scholar] [CrossRef]
- Vasile, G.; Ovarlez, J.P.; Pascal, F.; Tison, C. Coherency matrix estimation of heterogeneous clutter in high-resolution polarimetric SAR images. IEEE Trans. Geosci. Remote Sens. 2009, 48, 1809–1826. [Google Scholar] [CrossRef]
- Yao, K. A representation theorem and its applications to spherically-invariant random processes. IEEE Trans. Inf. Theory 1973, 19, 600–608. [Google Scholar]
- Gao, H.; Wang, C.; Xiang, D.; Ye, J.; Wang, G. TSPol-ASLIC: Adaptive superpixel generation with local iterative clustering for time-series quad-and dual-polarization SAR data. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–15. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Wu, W.; Guo, H.; Li, X. Urban area human-made target detection for PolSAR data based on a nonzero-mean statistical model. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1782–1786. [Google Scholar] [CrossRef]
- Shi, L.; Zhang, L.; Yang, J.; Zhang, L.; Li, P. Supervised graph embedding for polarimetric SAR image classification. IEEE Geosci. Remote Sens. Lett. 2012, 10, 216–220. [Google Scholar] [CrossRef]
- Ren, Y.; Yang, J.; Zhao, L.; Li, P.; Shi, L. SIRV-based high-resolution PolSAR image speckle suppression via dual-domain filtering. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5923–5938. [Google Scholar] [CrossRef]
- Xiang, D.; Ban, Y.; Wang, W.; Su, Y. Adaptive superpixel generation for polarimetric SAR images with local iterative clustering and SIRV model. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3115–3131. [Google Scholar] [CrossRef]
- Magnier, B.; Abdulrahman, H.; Montesinos, P. A review of supervised edge detection evaluation methods and an objective comparison of filtering gradient computations using hysteresis thresholds. J. Imaging 2018, 4, 74. [Google Scholar] [CrossRef]
- Medina-Carnicer, R.; Carmona-Poyato, A.; Muñoz-Salinas, R.; Madrid-Cuevas, F.J. Determining hysteresis thresholds for edge detection by combining the advantages and disadvantages of thresholding methods. IEEE Trans. Image Process. 2009, 19, 165–173. [Google Scholar] [CrossRef]
- Wei, Q.R.; Feng, D.Z.; Xie, H. Edge detector of SAR images using crater-shaped window with edge compensation strategy. IEEE Geosci. Remote Sens. Lett. 2015, 13, 38–42. [Google Scholar] [CrossRef]
- Quan, S.; Xiang, D.; Xiong, B.; Kuang, G. Edge detection for PolSAR images integrating scattering characteristics and optimal contrast. IEEE Geosci. Remote Sens. Lett. 2019, 17, 257–261. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Kernel | Precision | Recall |
|---|---|---|---|
| 15 May | SDAN-based 2D Gaussian kernel | 0.76 | 0.35 |
| 18 June | SDAN-based 2D Gaussian kernel | 0.69 | 0.55 |
| 26 July | SDAN-based 2D Gaussian kernel | 0.72 | 0.38 |
| 12 September | SDAN-based 2D Gaussian kernel | 0.58 | 0.62 |
| Multi-temporal PolSAR images | SDAN-based 3D mean kernel | 0.81 | 0.58 |
| SDAN-based 3D maximum kernel | 0.47 | 0.82 | |
| SDAN-based 3D RMS kernel | 0.68 | 0.80 | |
| SDAN-based 3D Gaussian-like kernel | 0.84 | 0.79 |
| Date | Kernel | Precision | Recall |
|---|---|---|---|
| 23 April | SDAN-based 2D Gaussian kernel | 0.69 | 0.42 |
| 17 May | SDAN-based 2D Gaussian kernel | 0.76 | 0.65 |
| 10 June | SDAN-based 2D Gaussian kernel | 0.72 | 0.67 |
| 4 July | SDAN-based 2D Gaussian kernel | 0.71 | 0.63 |
| Multi-temporal PolSAR images | SDAN-based 3D mean kernel | 0.90 | 0.60 |
| SDAN-based 3D maximum kernel | 0.63 | 0.86 | |
| SDAN-based 3D RMS kernel | 0.88 | 0.83 | |
| SDAN-based 3D Gaussian-like kernel | 0.94 | 0.82 |
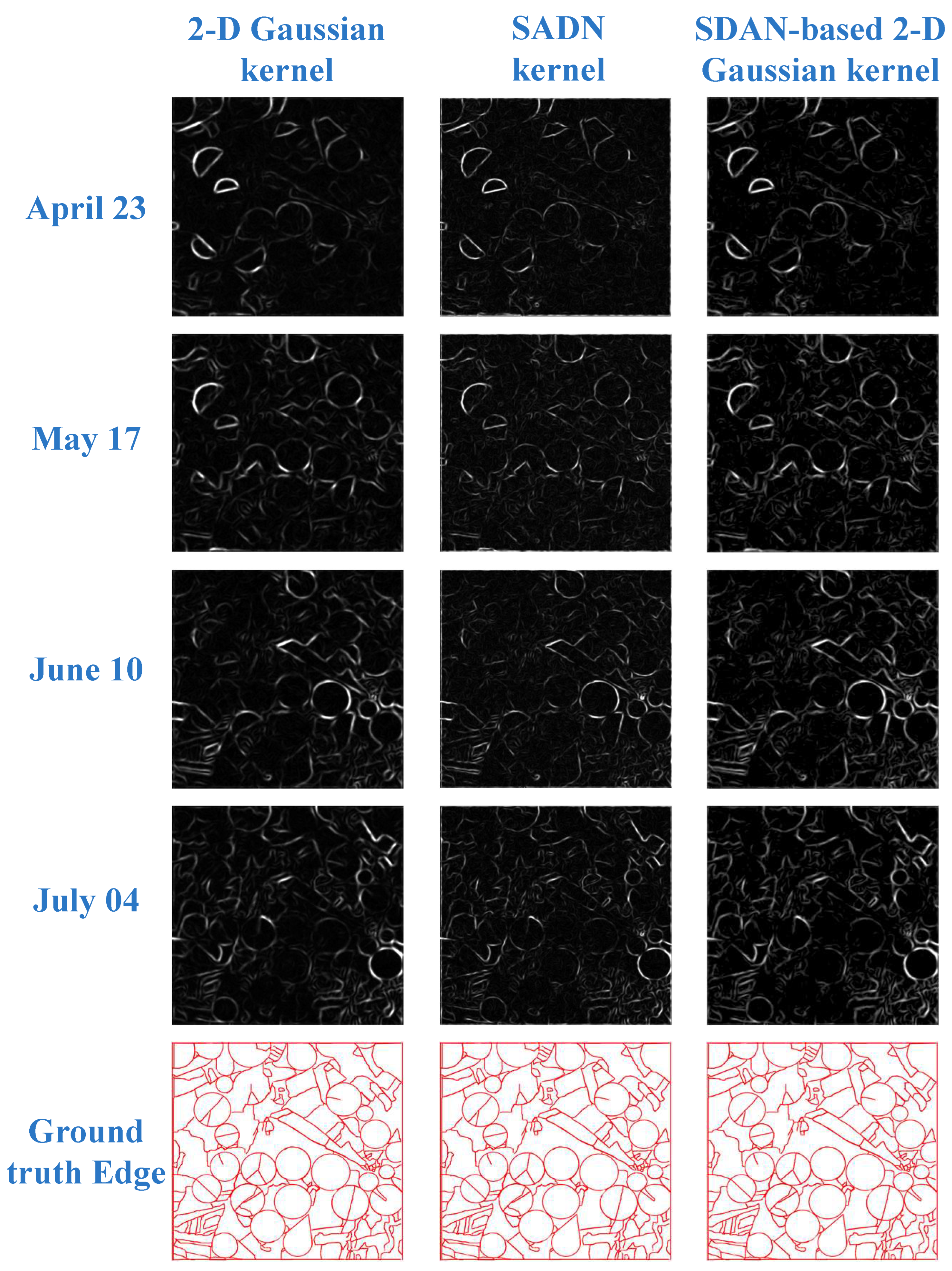
| Method | 23 April | 17 May | 10 June | 4 July | ||||
|---|---|---|---|---|---|---|---|---|
| Precision | Recall | Precision | Recall | Precision | Recall | Precision | Recall | |
| 2D Gaussian kernel | 0.68 | 0.39 | 0.73 | 0.52 | 0.71 | 0.61 | 0.71 | 0.55 |
| SDAN kernel | 0.62 | 0.40 | 0.69 | 0.60 | 0.68 | 0.63 | 0.64 | 0.58 |
| SDAN-based 2D Gaussian kernel | 0.69 | 0.42 | 0.76 | 0.65 | 0.72 | 0.67 | 0.71 | 0.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, X.; Guan, D.; Li, B.; Chen, Z.; Pan, L. A Novel Edge Detection Method for Multi-Temporal PolSAR Images Based on the SIRV Model and a SDAN-Based 3D Gaussian-like Kernel. Remote Sens. 2023, 15, 2685. https://doi.org/10.3390/rs15102685
Zheng X, Guan D, Li B, Chen Z, Pan L. A Novel Edge Detection Method for Multi-Temporal PolSAR Images Based on the SIRV Model and a SDAN-Based 3D Gaussian-like Kernel. Remote Sensing. 2023; 15(10):2685. https://doi.org/10.3390/rs15102685
Chicago/Turabian StyleZheng, Xiaolong, Dongdong Guan, Bangjie Li, Zhengsheng Chen, and Lefei Pan. 2023. "A Novel Edge Detection Method for Multi-Temporal PolSAR Images Based on the SIRV Model and a SDAN-Based 3D Gaussian-like Kernel" Remote Sensing 15, no. 10: 2685. https://doi.org/10.3390/rs15102685
APA StyleZheng, X., Guan, D., Li, B., Chen, Z., & Pan, L. (2023). A Novel Edge Detection Method for Multi-Temporal PolSAR Images Based on the SIRV Model and a SDAN-Based 3D Gaussian-like Kernel. Remote Sensing, 15(10), 2685. https://doi.org/10.3390/rs15102685