1. Introduction
Building matching (BM) is the task of determining the corresponding data of buildings in query data from a database with given geographic labels and other information, which can be applied to the real-time positioning of unmanned aerial vehicles (UAV) [
1,
2,
3], visual pose estimation [
4,
5,
6], and 3D reconstruction [
7] in remote sensing. The most common data type used for BM is images. Image-based retrieval methods for BM (e.g., [
8,
9,
10,
11]) attempt to identify similar database images that depict the same landmarks as the query image. Typically, the retrieved images are ranked according to a given similarity metric (e.g., the L1 norm distance between Bag-of-Words vectors [
12], L2 norm distance between the compact representation and vector [
13,
14]) to obtain the BM result. In localization tasks, the position of the best-matching database image is usually treated as the position of the query image, or the positions of the top N images are fused to obtain the position of the query image [
15,
16,
17]. With the rapid development of deep learning, various end-to-end deep methods have been studied, significantly improving the accuracy of BM.
Although the above methods have led to achievements, it is well-understood that their BM accuracy is largely dependent on the quality and quantity of images in the database. Specifically, if the images of the corresponding area in the database have significant differences from the matching image in terms of shooting angles and lighting conditions, accurate BM cannot be achieved in the given area. The images in the database are downloaded in bulk from the network. On the one hand, the number of images of tourist attractions or landmarks in the network is much higher than that of ordinary buildings, which leads to a highly uneven distribution of BM accuracy. When the building image to be matched appears infrequently in the network, it is not easy to obtain accurate matching results. On the other hand, for large-scale maps [
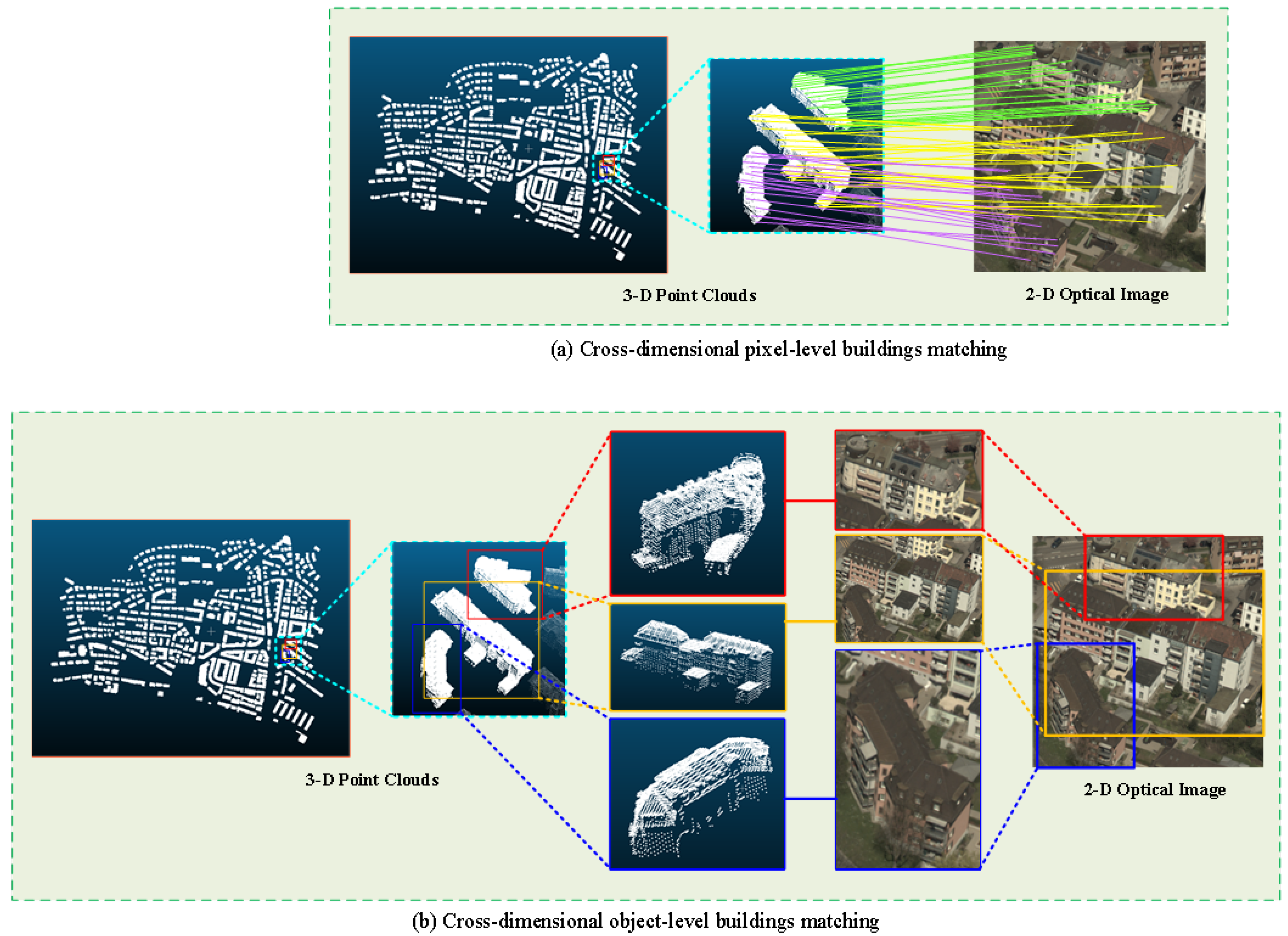
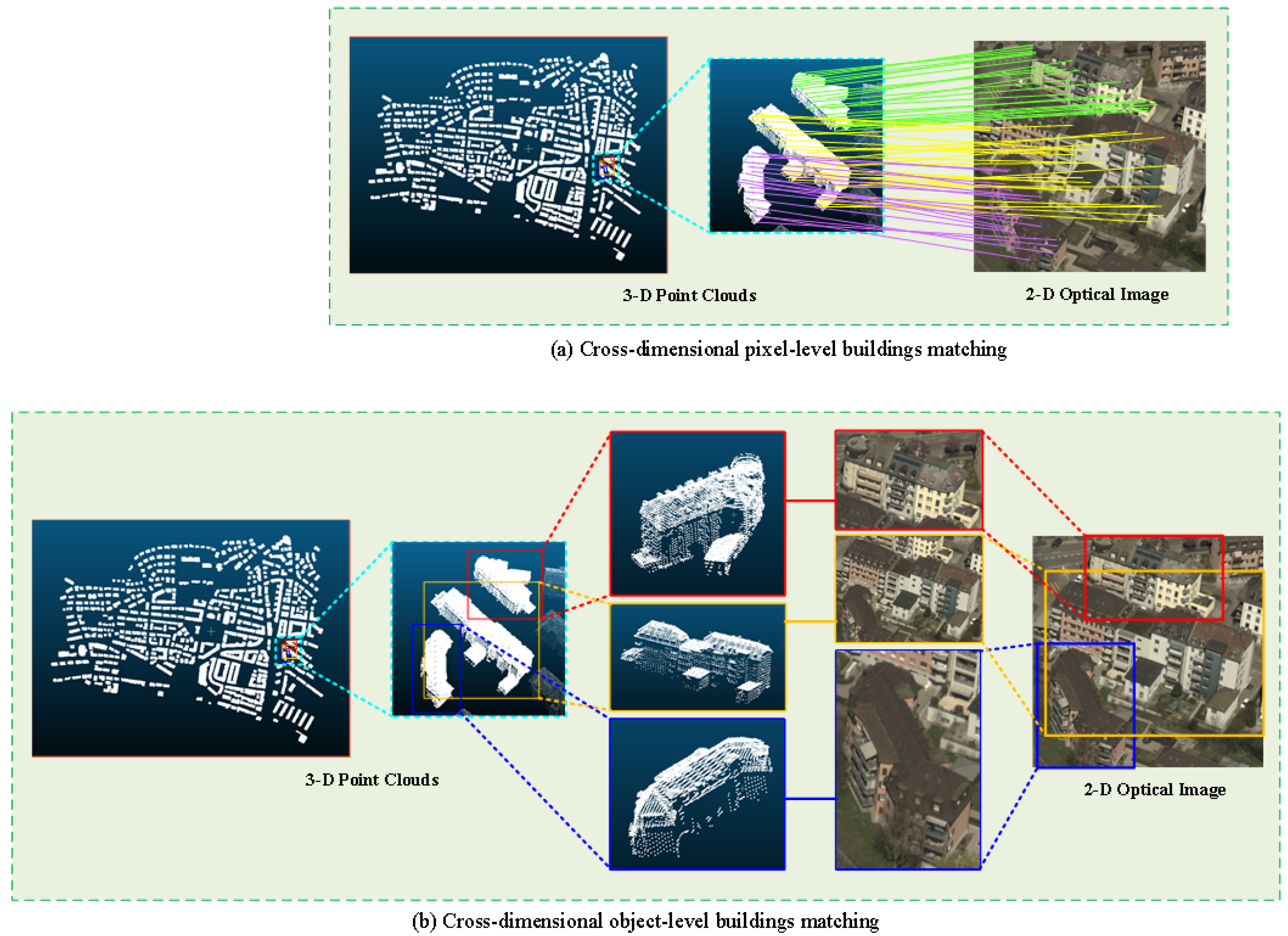
18], this method requires a large number of images in the database as a support, which requires high computing power and storage resources. When the target carrier of the localization task is an unmanned aerial vehicle that has lost network control signals, it will be difficult to complete BM without the support of ground data resources and computing resources. Compared with two-dimensional image data, three-dimensional point cloud data composed of coordinates do not have the problem of the shooting angle and light conditions and do not require the storage a large amount of image data in the database. Therefore, compared with the image-matching positioning method, the image-point-cloud-matching method requires less computing power and storage resources at the terminal. Secondly, the image-point-cloud-matching method is not affected by the quality and quantity of images in the database, reducing the possibility of erroneous matching caused by the problem of data imbalance in the database. Therefore, in order to overcome the serious dependence of the localization task on the image database and reduce the demand for computing and storage resources for BM-based localization tasks, the pixel-level cross-dimensional matching method for 2D optical images and 3D point clouds provides a promising strategy, as shown in
Figure 1a.
The current cross-dimensional data pixel-level matching methods can be divided into three categories. The typical process of the first category is to first recover the 3D structure of the scene [
19,
20], usually reconstructed from images taken at equal intervals using motion structure (SfM) [
21,
22] and multi-view systems (MVS) [
23] as the input. Each 3D point is triangulated using multiple 2D local features (such as SIFT [
24]) and associated with the corresponding image descriptor. Then, the pixel-level cross-dimensional correspondence between the local feature descriptor in the query image and the 3D point descriptor is found [
15]. These pixel-level descriptors are homogeneous, because the points inherit the descriptors of the corresponding pixels in the reconstructed 3D scene [
25]. The second category of methods identifies associations between different-dimensional data by mapping descriptors from different domains to a shared latent space. However, they only construct block-by-block descriptors, which typically lead to coarse-grained matching results. Instead, 3DTNet [
26] takes 2D and 3D local patches as the input and extracts 2D features from 2D patches using unique 3D descriptors that help it to learn 3D patches. However, 3DTNet is only used for 3D matching. The network uses 2D features as auxiliary information to render 3D features more discriminative. Recently, learning descriptors that allow for direct matching and retrieval between 2D and 3D local patches have been proposed with 2D3DMatch-Net [
27] and LCD [
28]. Other research has established a connection between 2D and 3D features for specific applications, such as object pose estimation. Additionally, some methods achieve cross-dimensional matching through registration, such as that described in [
29], by converting registration problems into classification and inverse camera projection optimization problems using relative rigid transformation for cross-dimensional matching. The authors of [
30] proposed a method that uses a two-stage approach to align two inputs of data in a virtual reference coordinate system (virtual alignment) and then compare and align the data to complete the matching. However, even if accurate descriptors can be extracted from 2D images and 3D point clouds, the above two categories of methods still cannot establish accurate pixel-level cross-dimensional matching relationships. There are two reasons for this phenomenon. Firstly, due to the sparsity of point clouds, local point descriptors can be mapped to many pixel descriptors in 2D images, increasing matching ambiguity. To address this problem, Liu et al. [
30] proposed a large-scale camera positioning method based on 2D–3D data matching, adding a disambiguation module that uses global contextual information to solve the problem of matching ambiguity. Secondly, as 2D images are usually a 2D mapping of the appearance of the scene [
31], while 3D point clouds encode the structure of the scene, there are significant differences between the attributes of 2D images and 3D point clouds, and the descriptor loss functions of existing 2D or 3D local feature descriptions [
32,
33,
34] cannot achieve accurate convergence in cross-dimensional matching tasks. Therefore, it is important to perform object-level cross-dimensional data matching for more effective solutions to the above problems.
In the task of matching building images and point clouds, object-level cross-dimensional data-matching methods match the building objects in the images and the point clouds as the core, as shown in
Figure 1b. Compared with pixel-level matching methods, object-level matching methods extract joint descriptors from the data containing global information of the targets and map them to the descriptor space for matching. The global feature extraction method, which focuses on the overall target effectively, alleviates the problem of fuzzy matching caused by the sparsity of point clouds, and the descriptor space solves the problem of attribute differences in cross-dimensional data, reducing the dependence of traditional image-based positioning methods on large amounts of image data. This concept provides new ideas for various fields, such as the precise self-positioning of drones in the state of control signal loss, urban management, smart city construction, high-quality building shape reconstruction, and so on. The core of this method lies in the choice of the descriptor space. By choosing a better descriptor space, one can obtain more accurate cross-dimensional matching results. The authors of [
35] proposed a joint global embedding method for 3D shapes and images to solve retrieval tasks. By directly binding handcrafted 3D descriptors to learned image descriptors, cross-dimensional descriptors for object-level retrieval tasks were generated. The authors of [
36] proposed a deep-learning-based cross-dimensional object-level descriptor space occupancy probability descriptor (SOPD) which uses the occupancy probability of each unit space of the object as the cross-dimensional descriptor.
In this study, we designed a plug-and-play Joint Descriptor Extraction Module (JDEM) to extract our proposed new joint descriptors, called Symbolic Distance Descriptors (SDD). The SDD utilize the 3D geometric invariance of building objects, using features that contain their 3D structural information as descriptors. This not only overcomes the inherent differences in attributes between 2D and 3D data but also reduces the fuzzy matching caused by the similarity between pixel-level descriptors. In addition, we propose Multi-View Adaptive Loss (MAL) to improve the adaptability of the image encoder module to images taken from different angles and to enhance the robustness of the joint descriptors. To achieve cross-dimensional BM, a corresponding database is required. Although Yan et al. [
36] proposed a 2D–3D object-level building-matching data set, only its 3D point clouds were obtained from the real world. We constructed a fully real-world 2D–3D cross-dimensional object-level building-matching data set called 2D-3D-CDOBM. The data set contains multi-angle optical images, point clouds, and the corresponding 3D models for over 400 buildings. We conducted extensive experiments on our data set to verify that our proposed descriptors can accurately perform cross-dimensional object-level matching tasks.
The important contributions of this paper are as follows:
A novel cross-dimensional object-level BM method based on the SDD is proposed. The method compensates for the modal differences between 2D optical images and 3D point clouds in object-level building data.
A plug-and-play JDEM is proposed. JDEM utilizes the three-dimensional geometric invariance of objects in the real physical world to obtain the same domain features by mapping the different dimensional data of objects to a three-dimensional space.
MAL is proposed to reduce the distance of descriptors extracted from images of the same object from different angles in the SDD space. The loss function improves the adaptability of the image encoder module to images from different angles.
2. Materials and Methods
This section describes the details of the proposed descriptor, SDD (
Section 2.1), the algorithm structure of the proposed cross-dimensional matching method (
Section 2.2), the used loss function (
Section 2.3), the proposed data used for the training, verification, and testing of the algorithm (
Section 2.4), evaluation metrics (
Section 2.5), and the training platform and parameter settings (
Section 2.6).
2.1. SDD
Under ideal conditions, the imaging mechanism of 2D images can be simplified to a pinhole imaging model in which the captured object is projected onto the photosensitive element through the pinhole. Therefore, the images can be regarded as the projection of the 3D world scene to the 2D space. The image data format is h × v, where h is the number of horizontal pixels, and v is the number of vertical pixels. However, in the projection process, the loss of information is likely to occur due to the positional relationship, such as the incomplete structure of the occluded object in the image caused by the occlusion relationship.
While 3D point clouds are usually obtained via LiDAR scanning, by emitting a laser beam towards an object, LiDAR receives the laser radiation reflected by the scene and produces a continuous analog signal. At last, LiDAR restores this to a point cloud of the object scene [
37,
38]. The data form of the point cloud is shown in (1):
where
x,
y, and
z are the relative position coordinates of the points
pi in the point cloud in the world’s physical coordinate system. LiDAR is an active sensor, and the number of point clouds generated by it is positively correlated with the LiDAR scanning time. The point density at the top of the building is higher than that on the sides of the building. Therefore, the matching of the 2D images and the 3D point clouds requires effort.
However, neither 2D images nor 3D point clouds are naturally generated. They are both derived from the 3D physical world via mapping or projection through corresponding sensors. Although the data formats are different, both are embodiments of the 3D physical world object containing the corresponding 3D information, that is, the 3D geometric invariance. According to this characteristic, by extracting 3D geometric descriptors from 2D images and 3D point clouds, one can repair their missing information and map descriptors extracted from different dimensional data to the same descriptor space. Therefore, the key to the cross-dimensional matching method is descriptor extraction.
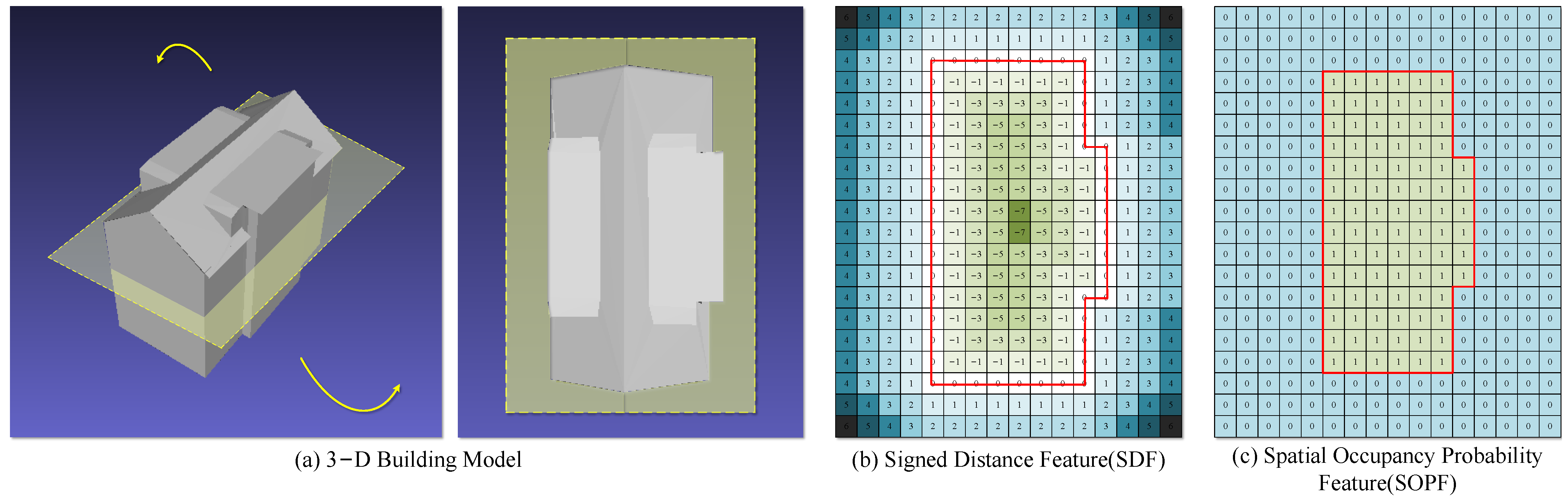
Our method uses the SDD as a cross-domain descriptor extracted from different dimensional data. The SDD is a descriptor obtained via sampling of the Symbol Distance Feature (SDF) [
39] at the threshold τ. SDF is a three-dimensional feature that describes the distance from any point in the normalized metric space to the model boundary, as shown in
Figure 2b. If the sampling point is within the boundary, its SDF feature for the current sampling point is set to negative. Conversely, if the point is outside the boundary, its SDF feature is set to positive. The farther the sampling point is from the boundary, the greater the modulus of SDF will be. Since SDF is a description of distance, the threshold τ is usually set to zero.
Similar to the SDD, [
36] the Spatial Occupancy Probability Feature (SOPF) is used to describe the three-dimensional structure of the building, that is, the probability of the current sampling point being inside the model. Therefore, the SOPF of the sampling points outside the model surface is set to 0, and that inside is set to 1 (100%), as shown in
Figure 2c. Similarly, the SOPD also uses the threshold τ
1 to sample the SOPF, and the threshold τ
1 is usually set to 0.5 (50%). Compared with classification problems, deep learning networks have a better adaptability to regression problems. Therefore, compared with the SOPD, the network has a more significant learning ability and better learning effect for the SDD, which is also reflected in the experimental section (
Section 3).
2.2. Cross-Dimensional Matching Method
There are many mature image feature extraction methods, such as VGG [
40] and ResNet [
41], and many mature point cloud feature extraction methods, such as PointNet [
42] and PointNet++ [
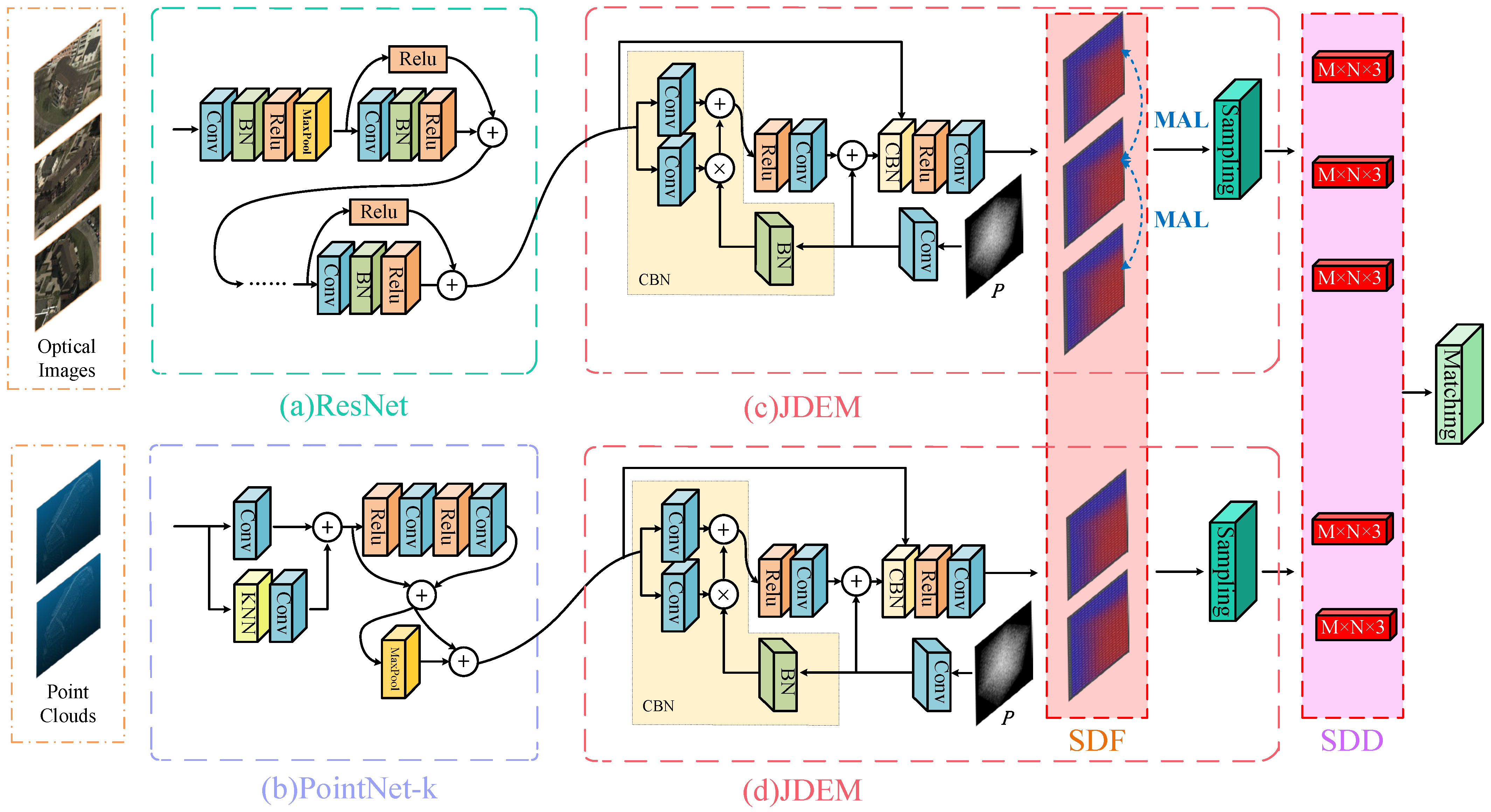
43]. In deep learning, the above encoder completes the front-end feature extraction function. The mapping relationship between the data and feature vectors of different modes is established. At this time, the formal unification task for different modal data features is completed. However, although these features contain information on different modal data, they cannot fully reflect the three-dimensional geometric invariance of the object. Therefore, we propose a plug-and-play JDEM module which can extract the SDD for cross-modal data matching after inserting the JDEM module. The classification results can be obtained through a linear layer after extracting the SDD.
A diagram of the structure of the cross-dimensional data matching method is shown in
Figure 3. Overall, our cross-dimensional matching method consists of two parts: the front-end traditional feature encoders and JDEM. The feature vector extracted by the front-end encoder and the random sampling point
P are used as the input for the JDEM, and the SDD feature value satisfying the threshold requirement in the random sampling point
P is used as an output to realize the mapping from a one-dimensional feature vector to a three-dimensional space descriptor. In the training process, it is necessary to input the sampling point
P randomly. On the one hand, this can reduce the demand for memory; on the other hand, it can improve the network’s generalization ability. In the training iteration process, the sampling point
P is obtained by sampling the normalized coordinate points corresponding to the ground truth of the building SDF. The method compares the SDD value corresponding to the sampling point
P obtained through the network’s prediction with the ground truth and calculates the loss function to guide the network’s training. It is worth noting that the SDD is a three-dimensional descriptor that can be visualized to facilitate the observation of the network training process and results.
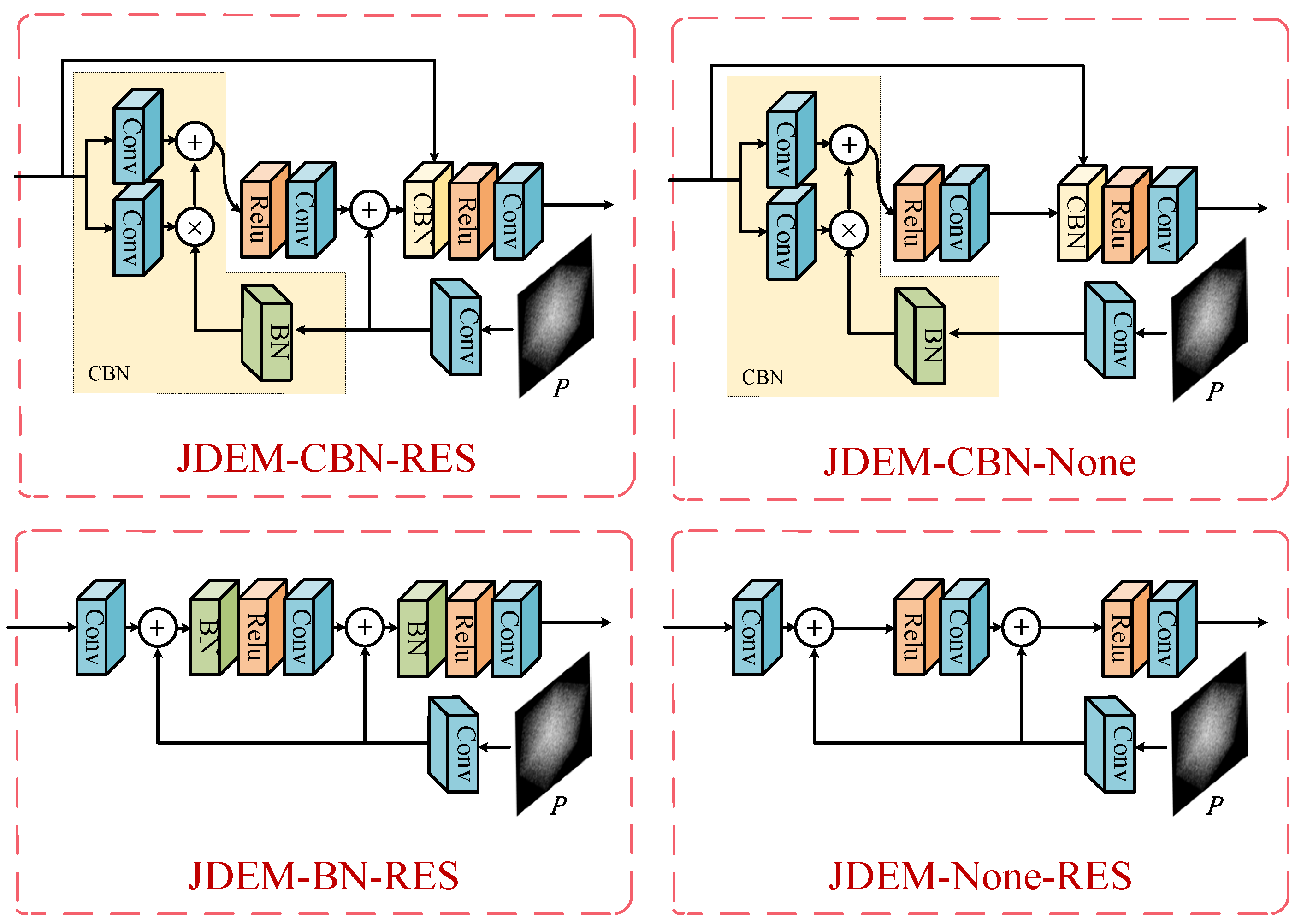
Specifically, in order to verify the optimal encoder combination for our cross-dimensional matching method, we used the ResNet and PointNet series as the front-end image and point cloud encoder, respectively. ResNet18/34/50/101/152 refers to different network depths. The difference between PointNet and PointNet-k is whether or not the Knn module is added. After adding the Knn module, the point cloud will be searched for the nearest
k points in each point space before entering the encoder. Then, these
k + 1 points are merged and input into the encoder to improve the regional generalization of the encoder. Inspired by OccNet [
44], we designed several different JDEM modules. The whole encoder combination is shown in
Table 1, and the structures of the different JDEM modules are shown in
Figure 4.
2.3. Loss Function
The fusion of multiple loss functions is used to calculate our loss function. The overall objective function
L is a multi-task objective function divided into multistage weight loss and MAL. Multistage weight loss was proposed by the authors of [
45].
2.3.1. Multistage Weight Loss
Multistage weight loss is a function that calculates the difference between the SDD extracted from the image or point cloud and the ground truth. Ground truth is the SDF obtained by calculating the distance between the point and the model boundary in which the point is sampled from the unit space, and the model is the normalized 3D model of the buildings.
Compared with the typical method for calculating feature loss, which treats each position in the metric space uniformly, as for the L1 norm showed in (2), multistage weight loss focuses more on the selection of the boundary points on the model surface and gives greater attention to the points near the model surface. In contrast, the points far from the model surface are appropriately ignored, as shown in (3). In this way, the network’s learning ability for building structures can be enhanced, and the SDD extraction effect can be optimized. At the same time, although points far away from the model’s surface receive less attention than others, they are less challenging to learn; thus, there is no negative impact on the results.
where
In is the image,
Fβ is the SDF feature extraction network,
GT is ground truth,
N is the number of images.
where
In is the image;
Fβ is the SDF feature extraction network;
GT is ground truth;
N is the number of images;
B is the number of sampling points;
w(
GTnb) is the weight corresponding to the current sampling point, determined by
GTnb; and
GTnb is the SDF ground truth of the current sampling point, that is, the distance between the current point and the surface of the model.
w(
GTnb) is shown in (4):
where
GTnb is the SDF ground truth of the current sampling point.
Through the new feature loss function, the difference between the predicted value and the ground truth of the critical points can be amplified so that the feature extraction network can extract more accurate features through a more authentic relationship.
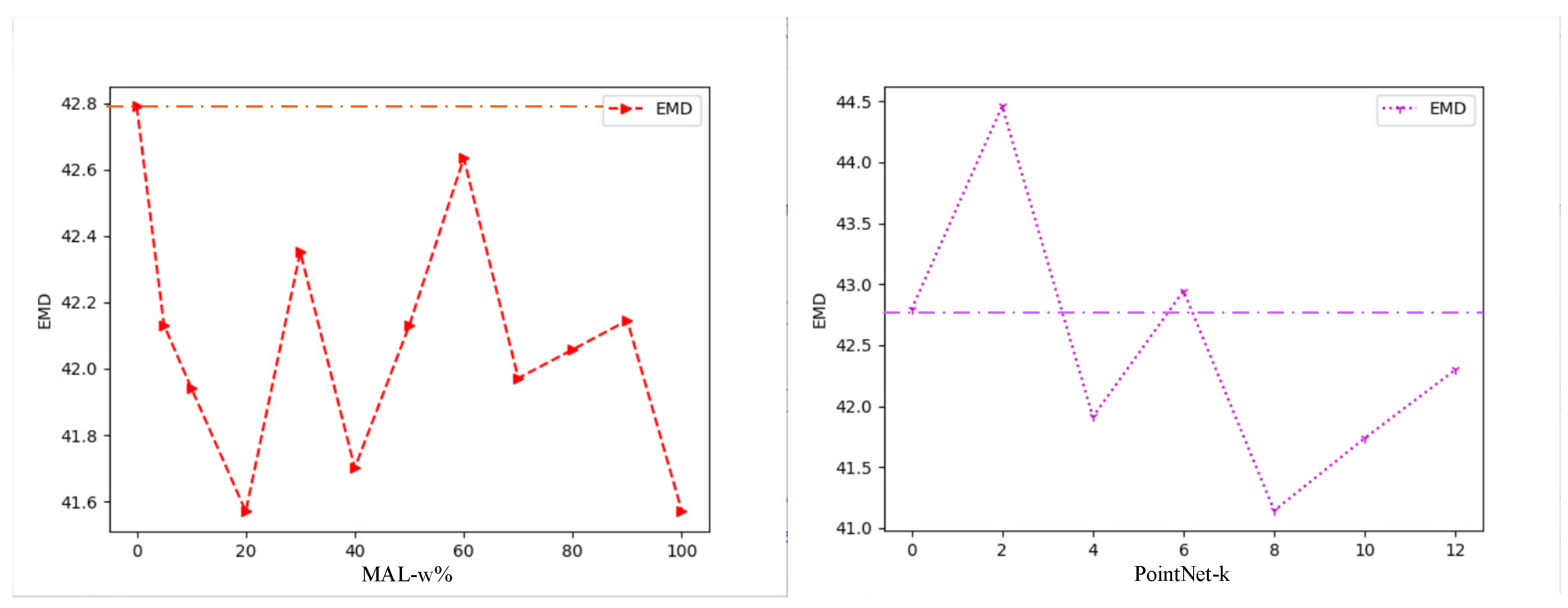
2.3.2. MAL
The same building is usually displayed in multiple remote-sensing images taken from different angles. Due to the difference in perspective, the buildings’ features extracted from different images are usually different. Therefore, the concept of MAL is proposed to reduce the feature distance of the images of the same building taken from different angles in the feature domain. MAL can improve the adaptability of the network to images of the same building taken from different angles and enhance the robustness of the features. Specifically, the image data, the building SDF ground truth, and the building ID are input into the network simultaneously during training. The distance of the SDD extracted from the image of the same building ID in the feature space is calculated, which alleviates the problem of cross-dimensional object-level matching errors caused by perspective differences. The calculation method of MAL is shown in (5) and (6):
where
Ia and
Ib are image data of the same building ID,
N is the number of the building ID,
w and
q are weights,
m is offset,
D is the SDD feature distance of images taken from different angles, and
Fβ is the SDD feature extraction network.
SDD is the mapping of the 3D structure of the building in the real physical world, but there are many building structures that are similar or even the same. Therefore, MAL only focuses on the distance of the SDDs extracted from the images of the same building ID and does not pay attention to others. The formula shown in (7) is used to load the data so as to improve the probability of different-angle images of the same building appearing in the same batch and not affecting the network’s learning ability:
where
S is the number of remaining samples in the current epoch,
a and
b are two random numbers from 0 to
S, and
na and
nb are the numbers of images of the current building taken from different angles in the current epoch.
Since the role of MAL is to shorten the distance of images of the same building taken from different angles in the descriptor space, MAL is not used at the beginning of the training. After the original loss reaches the best fit, MAL is added for training until the new best fit point is reached.
2.4. Proposed 2D-3D-CDOBM Data Set
In this section, the method for obtaining our data set is introduced first. The software named Labelme (v4.5.13) [
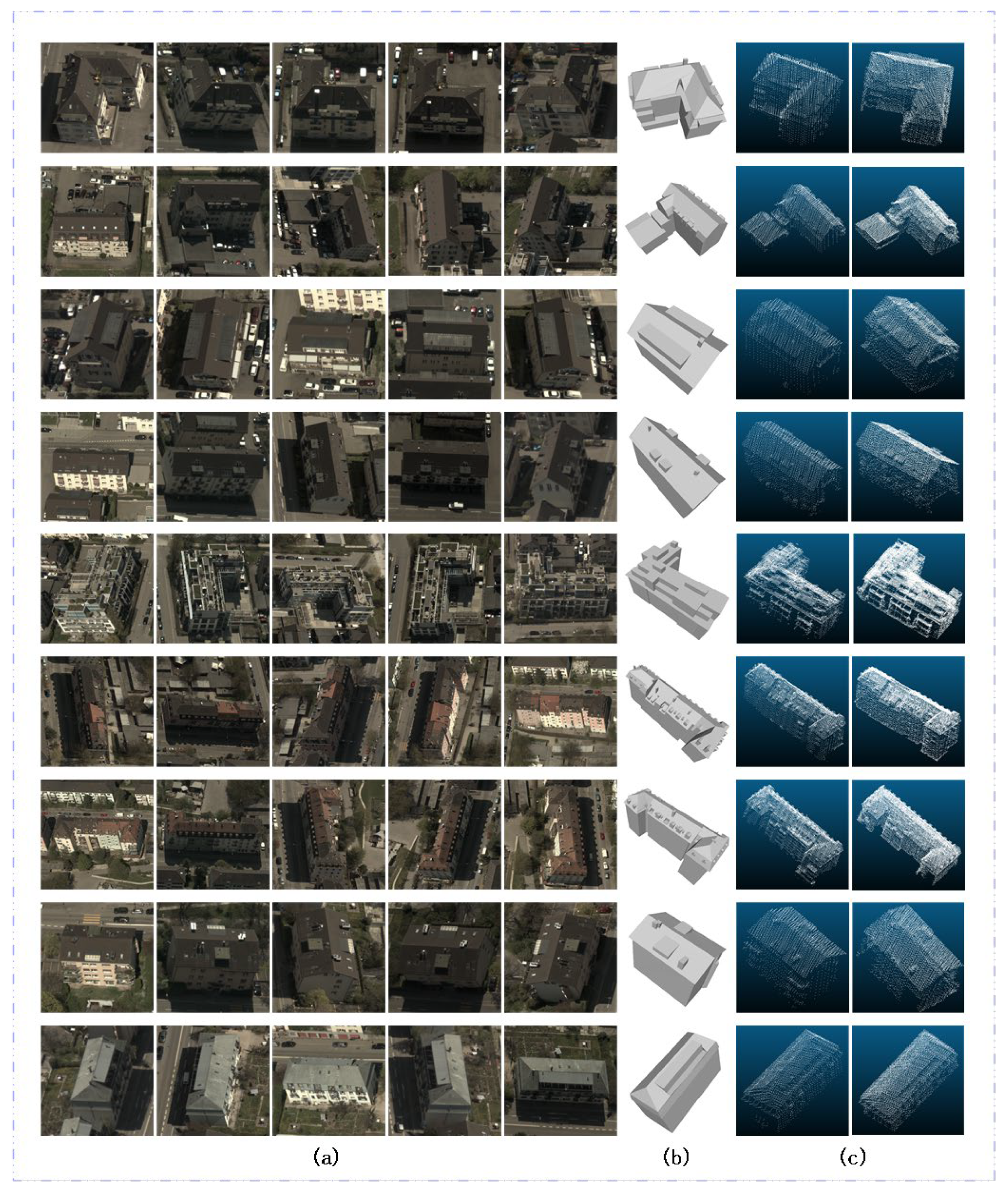
46] is used to label the buildings in the airborne optical image on the object level, cut the object image according to the label, and resize it to 224 × 224 pixels, as shown in
Figure 5a. The software named CloudCompare (v2.11.3) [
47] is used to cut the LiDAR point clouds in the object-level space, as shown in
Figure 5c. The software named Meshlab (v3.3) [
48] is used to segment the 3D models corresponding to the optical images and LiDAR point clouds in order to obtain the object-level model of a single building, as shown in
Figure 5b.
In order to verify the effect of our object-level joint descriptor in cross-dimensional matching tasks, an object-level data set composed of building images and corresponding point clouds is needed. In addition, to learn how to extract the SDD accurately, a building model corresponding to cross-dimensional data is necessary. Therefore, a data set consisting of object-level optical images, object-level point clouds, and 3D models of the corresponding buildings is produced. The numbers of various types of data points in the data set are shown in
Table 2.
2.4.1. Optical Images
The Institute of Geodesy and Photogrammetry, ETH Zurich, provides airborne optical images of the Zurich region that are published in the ISPRS data set [
49]. These optical images cover an area nearby the center of Zurich (Switzerland) and the ETH Hoenggerberg. The region comprises the center of the quarter of Hoengg, including different residential areas with different types of buildings (flat roofs, hip roofs, etc.)
The Zurich Hoengg data set is based on aerial photographs collected over Zurich in 1995. The data set consists of four aerial images of the city of Zurich taken at an average image scale of ca. 1:5000. The 23 cm × 23 cm color photographs were scanned at 14 µm, yielding color images of approximately 840 Mb. Each image is approximately 16,500 × 16,400 pixels. The photography equipment was flown ca. 1050 above the ground with 65% forward and 45% sideward overlap. The camera was a Leica RC20. We annotated, segmented, and produced a data set containing only 1 building per image, a total of 11,094 images of 453 houses.
2.4.2. Point Clouds
Twice in 2014 and again from 2017 to 2018, the Federal Government conducted two high-resolution laser scans of the geographical area of the canton of Zurich (E/N Min:2669255/1223895; E/N Max:2716900/1283336[m]) using the airborne LiDAR system method (minimum point density of 5 Pkt/m2). The reference system, CH1903+_LV95, has a position accuracy of ±0.2 (m) and a height accuracy of ±0.1 (m). The Swiss SURFACE 3D product and spatial data set (GIS-ZH No.24) were created. We segmented the object-level buildings and saved individual buildings as point cloud files, yielding a total of 906 point cloud files of 453 buildings.
2.4.3. Three-Dimensional Model and SDF Ground Truth
The CityGML data of Zurich is available at “
https://3D.bk.tudelft.nl/opendata/ (accessed on 24 January 2022)”, which includes the 3D models of buildings. After object-level splitting, SDF is extracted as the ground truth and input into the training network.
2.5. Evaluation Metrics
After extracting the SDD, PointNet [
42] is used to classify the descriptors for cross-dimensional matching. In order to verify the precision of the SDD in presenting the 3D geometric information of the object, the EMD [
50] is used to calculate the similarity between the SDD extracted from the 2D image and the SDD extracted from the 3D point cloud. EMD can intuitively describe the distance of the SDDs in the descriptor space. The smaller the EMD is, the more similar the SDDs are. Moreover, to verify the matching effect of our method, instance accuracy and category accuracy are used as metrics to evaluate the matching accuracy of the total sample and matching category accuracy of the building, respectively.
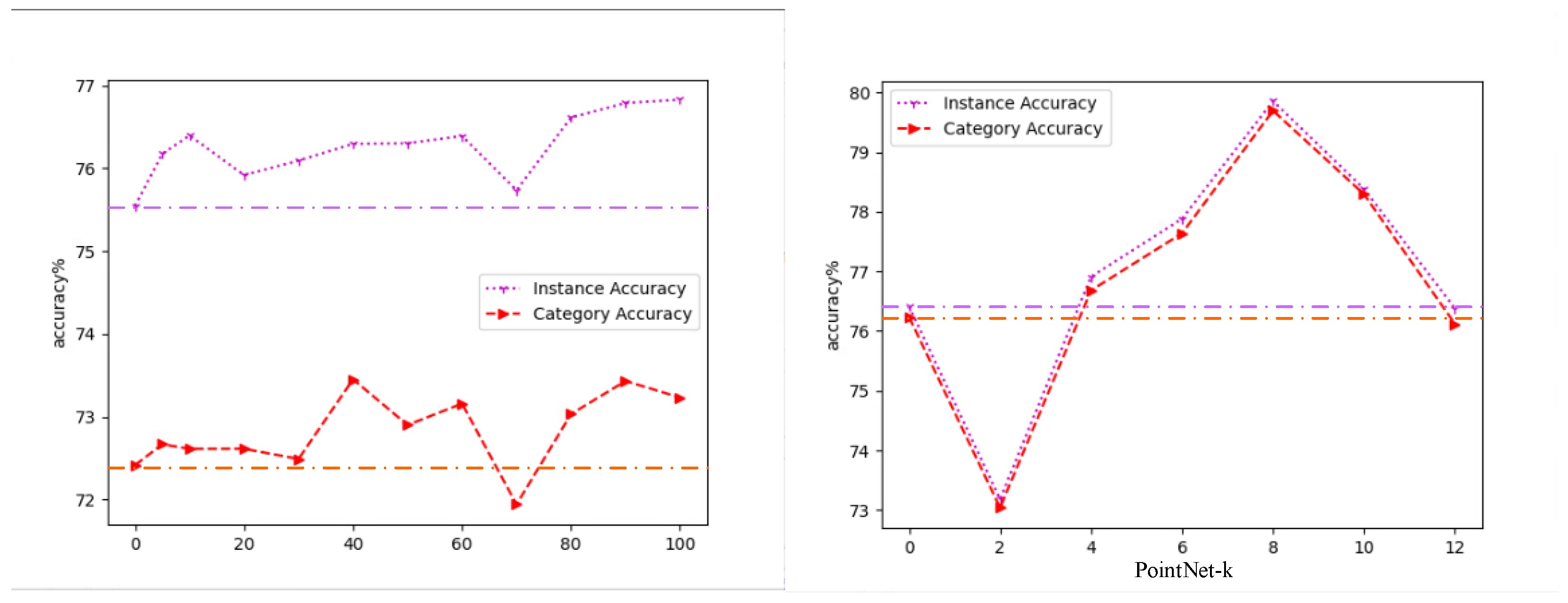
2.5.1. Instance Accuracy
Instance accuracy refers to the percentage of correctly matched data in the total data to be matched, as shown in (8):
where TP is the correct matching sample, and FP is the wrong matching sample.
2.5.2. Category Accuracy
Each building object is regarded as a class, and the category accuracy is the average accuracy of all the categories, as shown in (9):
where
An is the accuracy of each category, and
N is the total number of categories.
2.6. The Training Platform and Parameter Settings
All experiments were carried out in the same environment. Training and testing of the network were conducted under Ubuntu 18.04. The hardware environment included a single Intel i7 9700 CPU, and the GPU acceleration used a single NVIDIA RTX 2080 Super with 8 GB of memory. In training, the batch size was 64, the Adam optimizer is used, the learning rate was set to 1 × 10−4, and the epoch was 1500. We conducted multiple sets of experiments under different hyperparameter setting conditions and judged the optimal hyperparameter settings according to the experimental results. The number of points sampled from the training models was 100,000, with a distance in the range of −0.3 to 0.3 (based on the normalized model).
In these experiments, the 2D images were divided into training, validation, and test data in a ratio of 6:2:2. The 3D point clouds scanned in 2014 were used for training and validation, and the 3D point clouds scanned in 2017–2018 were used for testing.
4. Discussion
This section can be divided into two parts. The first part provides a discussion to further explore the specific advantages of our approach, the need for further research, and the potential applications of this research. The second part provides a discussion to explain the previous experimental results, which includes further elaboration of the experimental results, an analysis of the impact on the experimental data set, and future research directions.
Our method is a new method called JDEM which aims to extract a joint descriptor named SDD from cross-dimensional data. Through this method, the inherent modal differences between 2D images and 3D point cloud data are solved, and object-level matching relationships can accurately be established between different dimensional data. This research is of great practical value. For example, in the case of a UAV losing its control signal and positioning signal due to targeted interference, the use of the data matching method can help the UAV to complete self-positioning so that it can continue to complete the established task independently under offline conditions. However, due to the wide range of shooting angles and the great changes in light conditions in traditional image matching tasks, the image–image matching positioning method requires the storage of a large number of images of the UAV as a database. With the increase in the number of 2D images taken from different angles and lighting conditions in the same area in the database, the accuracy of positioning will also increase, but this will consume a lot of terminal storage space. The use of 3D point cloud data can solve this problem. Firstly, because the 3D point cloud data composed of coordinates do not have shooting angle and light condition problems, the image-point-cloud-matching method requires less storage space at the terminal than the image-matching positioning method. Secondly, the image-point-cloud-matching method is not affected by the quality or number of images in the database, which reduces the possibility of error matching caused by the data imbalance problem in the database. Therefore, our proposed method has good application value.
In this study, our method was compared with other methods for object-level cross-dimensional matching. Despite the better results achieved with our network, several issues remain to be addressed. Firstly, the joint descriptor proposed for our method is based on the three-dimensional features of the structure and does not contain the color information of the building. Therefore, it is easy to mismatch the faces of similar structures or the same building structure with different colors. There are many ways to obtain point clouds with color texture information [
51]. If the color information in such point cloud data can be added to the descriptor extraction process, the above problems can effectively be alleviated. Moreover, a problem that must be addressed is the data imbalance. Due to the characteristics of deep learning, structures with more occurrences in the training set can achieve better learning results. In comparison, structures with lower occurrences in the data set are difficult to understand and accurately learn. The data of just over 400 buildings are not enough to fully support the generalization learning of the network. Therefore, more buildings are necessary for the data set.




 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}