
Assimilating All-Sky Infrared Radiance Observations to Improve Ensemble Analyses and Short-Term Predictions of Thunderstorms


Abstract
1. Introduction
2. WoFS and Rapid-Cycling EnKF
3. Event Overviews and Experiment Design
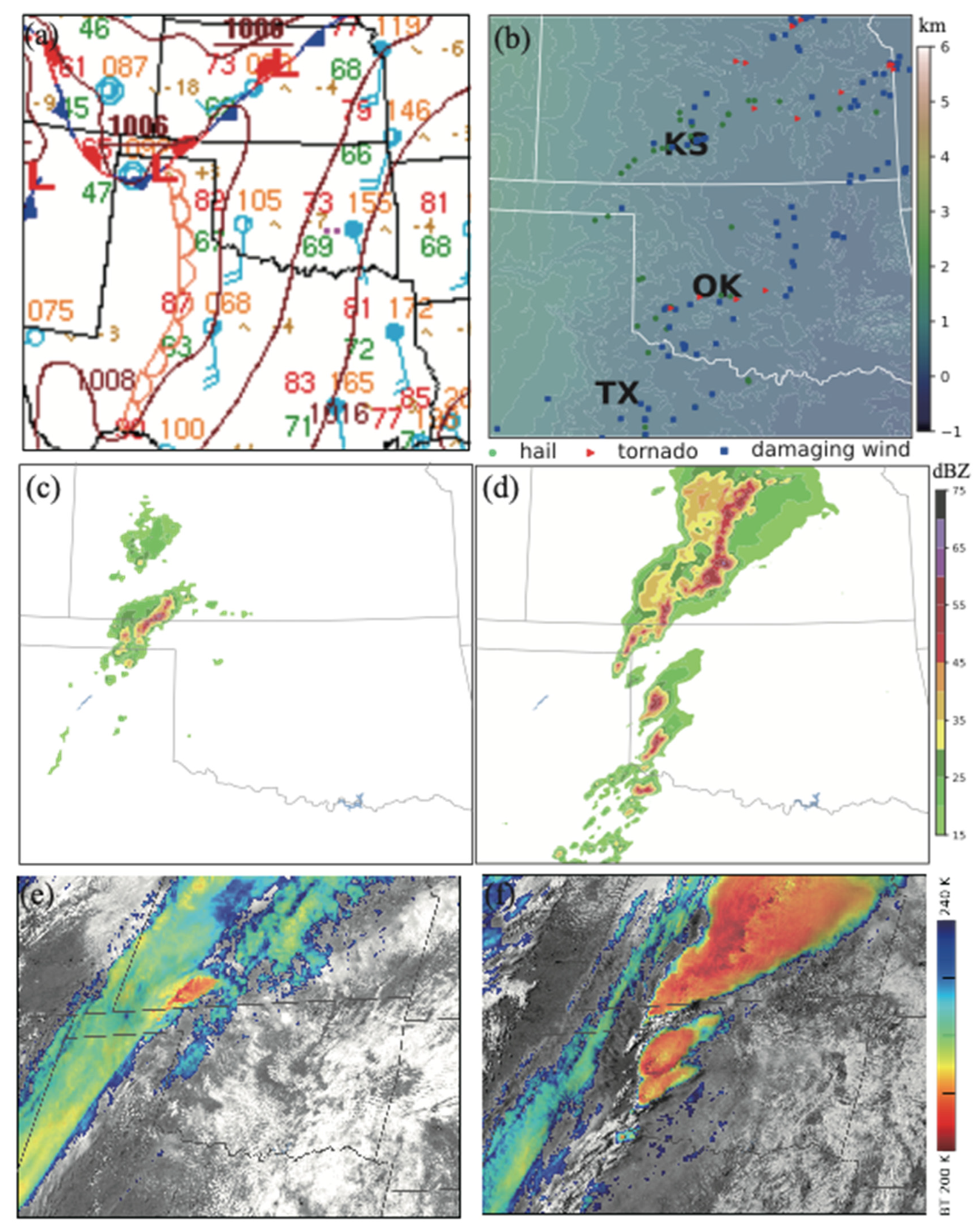
3.1. Event Overviews
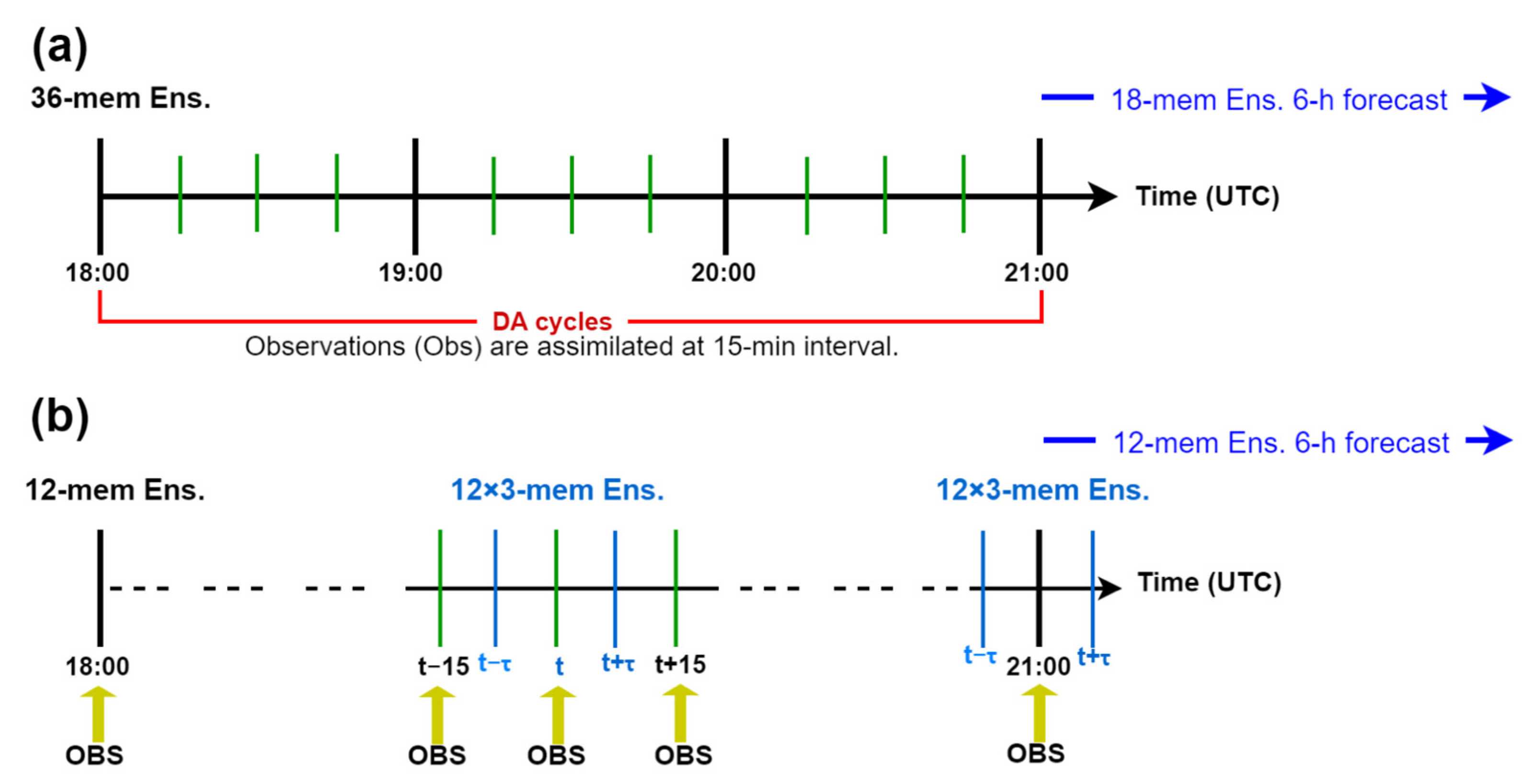
3.2. Experiment Design
3.3. Verification Methods
4. Experiment Results and Comparisons
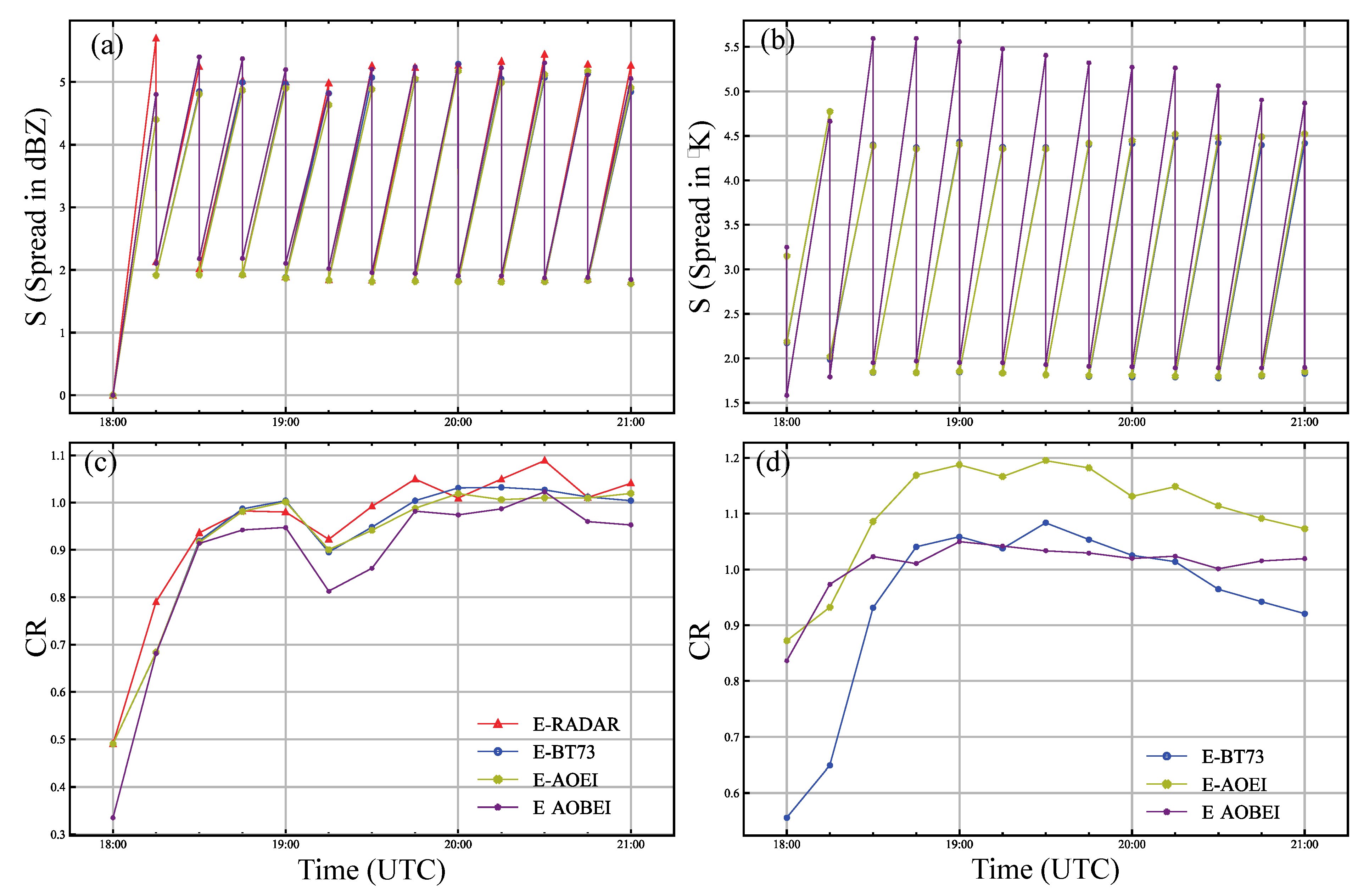
4.1. Assimilation Statistics for the First Group of Experiments
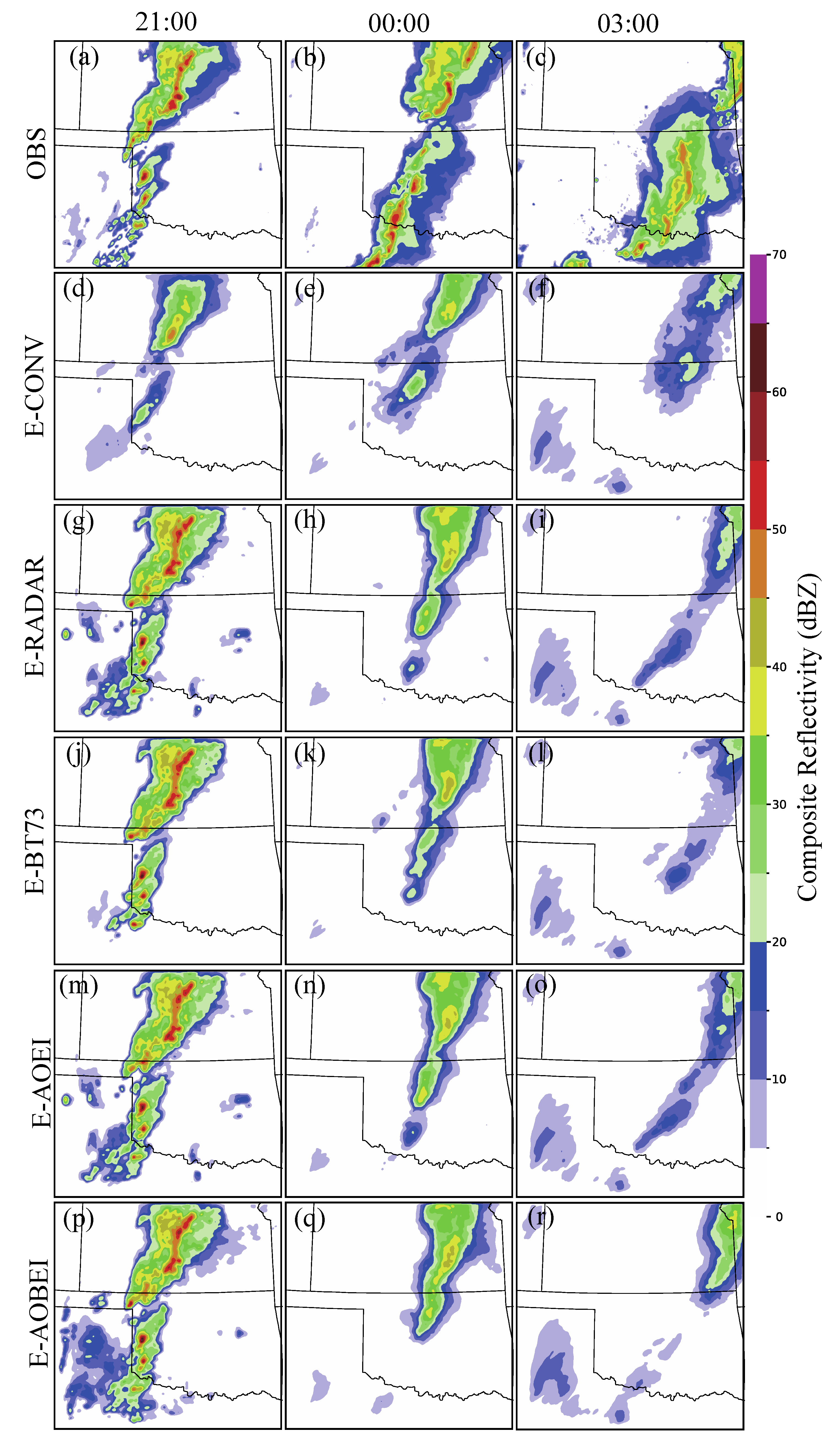
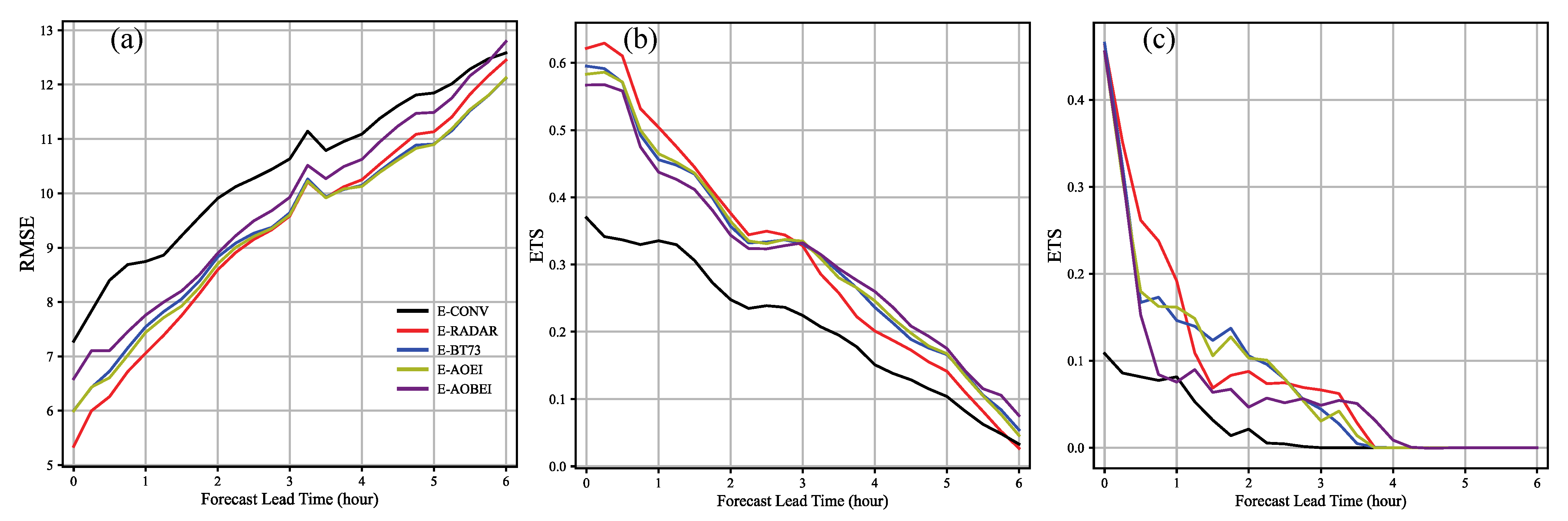
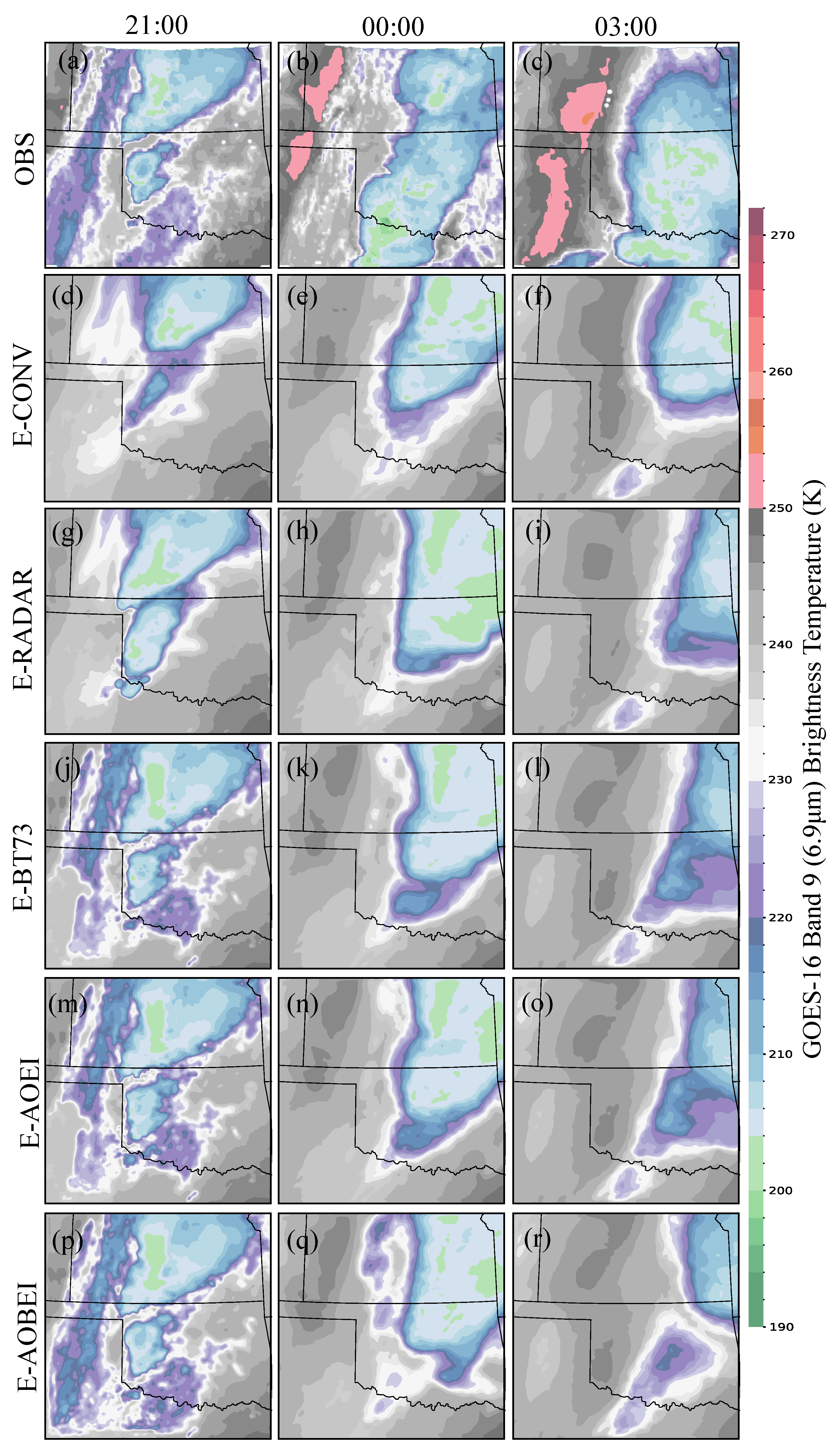
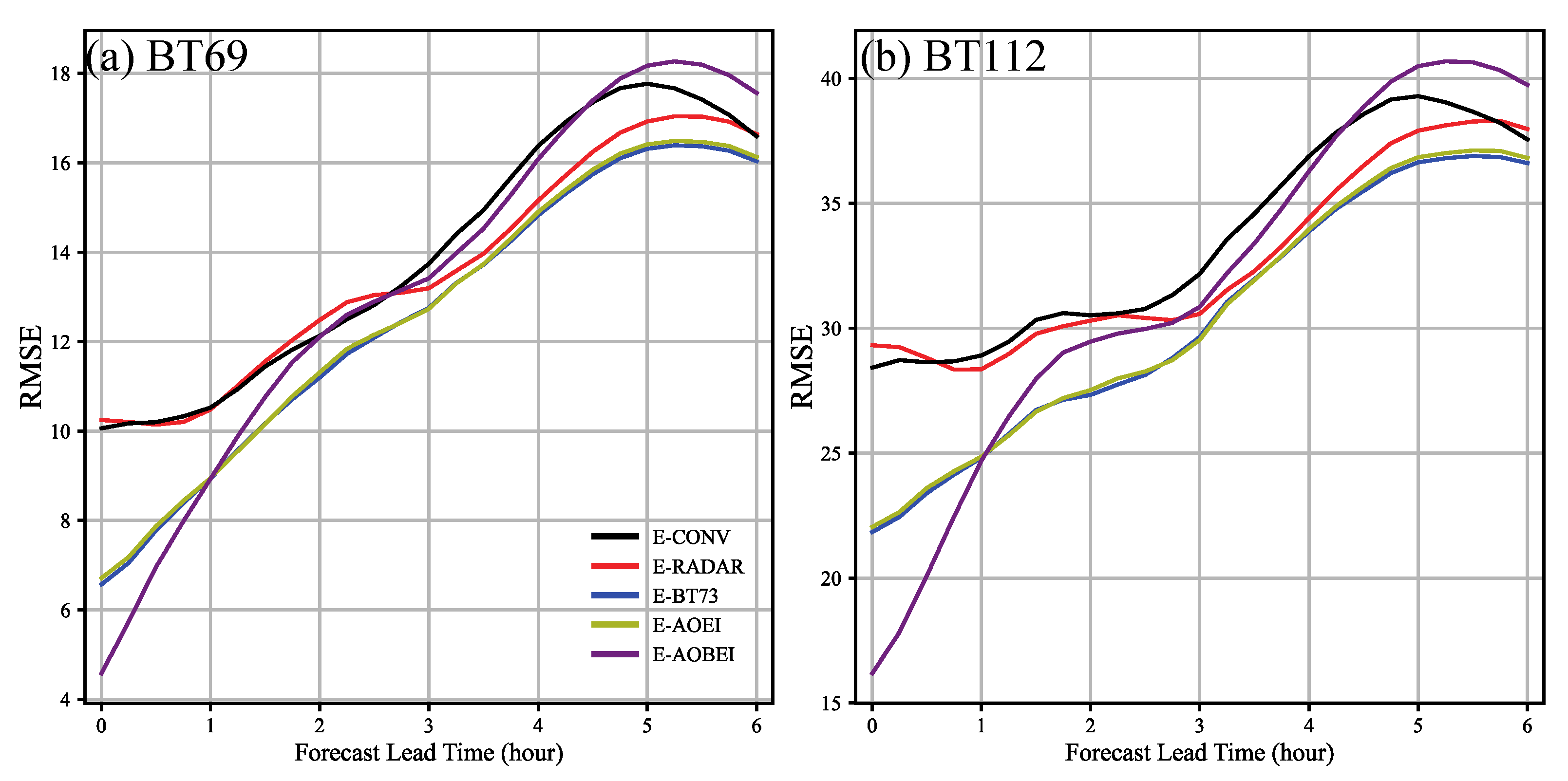
4.2. Forecast Performances for the First Group of Experiments
4.3. Assimilation Statistics for the Second Group of Experiments
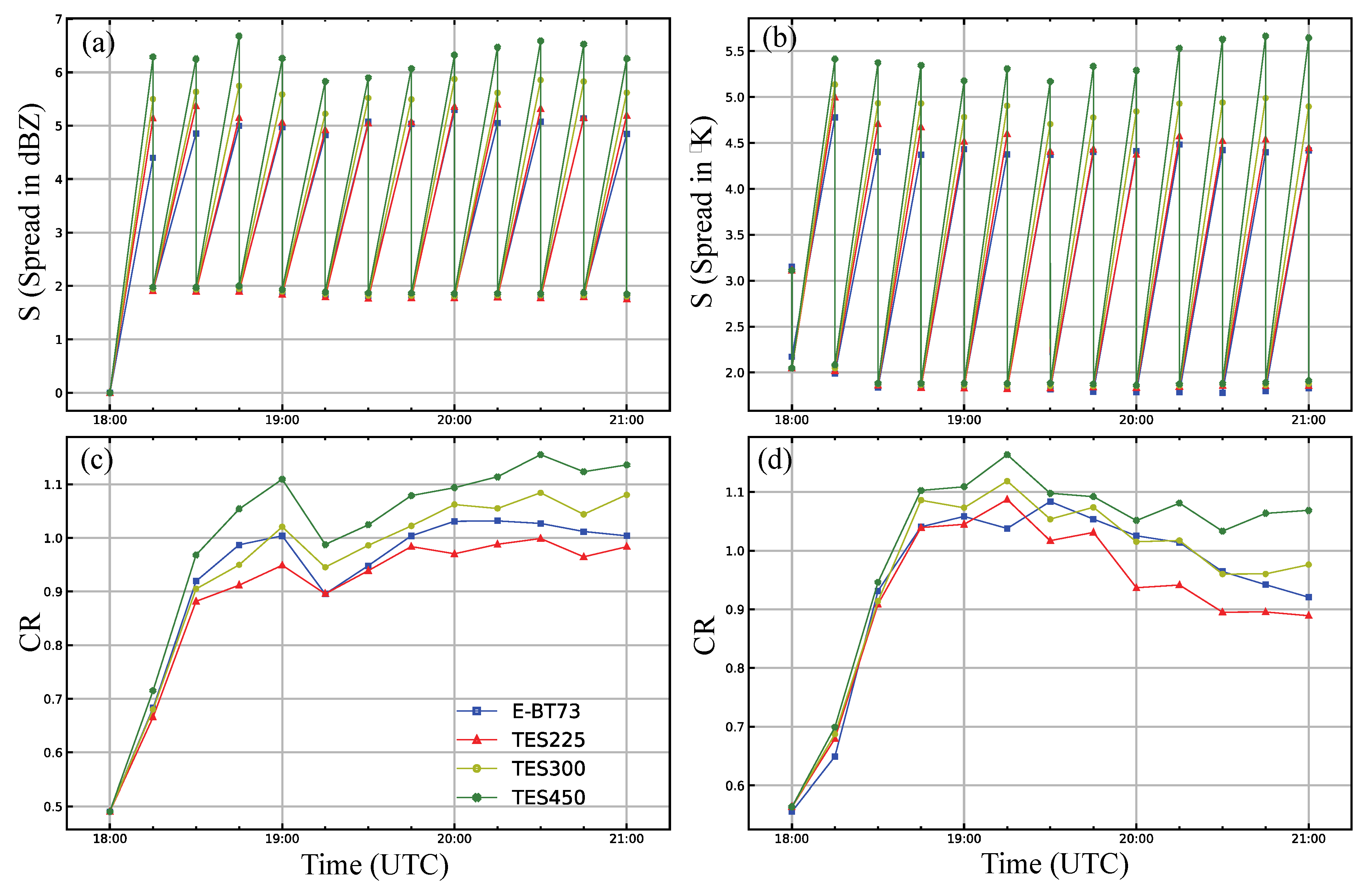
4.4. Forecast Performances for the Second Group of Experiments
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Derber, J.C.; Wu, W.-S. The Use of TOVS Cloud-Cleared Radiances in the NCEP SSI Analysis System. Mon. Weather Rev. 1998, 126, 2287–2299. [Google Scholar] [CrossRef]
- McNally, A.P.; Watts, P.D.; Smith, J.A.; Engelen, R.; Kelly, G.A.; Thépaut, J.N.; Matricardi, M. The Assimilation of AIRS Radiance Data at ECMWF. Q. J. R. Meteorol. Soc. 2006, 132, 935–957. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, E.; Mahajan, R.; Thomas, C.; Groff, D.; Van Delst, P.; Collard, A.; Kleist, D.; Treadon, R.; Derber, J.C. All-Sky Microwave Radiance Assimilation in NCEP’s GSI Analysis System. Mon. Weather Rev. 2016, 144, 4709–4735. [Google Scholar] [CrossRef]
- Schmit, T.J.; Gunshor, M.M.; Menzel, W.P.; Gurka, J.J.; Li, J.; Bachmeier, A.S. Introducing the next-generation Advanced Baseline Imager on GOES-R. Bull. Am. Meteorol. Soc. 2005, 86, 1079–1096. [Google Scholar] [CrossRef]
- Wheatley, D.M.; Knopfmeier, K.H.; Jones, T.A.; Creager, G.J. Storm-Scale Data Assimilation and Ensemble Forecasting with the NSSL Experimental Warn-on-Forecast System. Part I: Radar Data Experiments. Weather Forecast. 2015, 30, 1795–1817. [Google Scholar] [CrossRef]
- Jones, T.A.; Knopfmeier, K.; Wheatley, D.; Creager, G.; Minnis, P.; Palikonda, R. Storm-Scale Data Assimilation and Ensemble Forecasting with the NSSL Experimental Warn-on-Forecast System. Part II: Combined Radar and Satellite Data Experiments. Weather Forecast. 2016, 31, 297–327. [Google Scholar] [CrossRef]
- Jones, T.A.; Wang, X.; Skinner, P.; Johnson, A.; Wang, Y. Assimilation of GOES-13 Imager Clear-Sky Water Vapor (6.5 mm) Radiances into a Warn-on-Forecast System. Mon. Weather Rev. 2018, 146, 1077–1107. [Google Scholar] [CrossRef]
- Jones, T.A.; Skinner, P.; Yussouf, N.; Knopfmeier, K.; Reinhart, A.; Wang, X.; Bedka, K.; Smith, W.; Palikonda, R. Assimilation of GOES-16 Radiances and Retrievals into the Warn-on-Forecast System. Mon. Weather Rev. 2020, 148, 1829–1859. [Google Scholar] [CrossRef]
- Zhang, Y.; Stensrud, D.J.; Zhang, F. Simultaneous Assimilation of Radar and All-Sky Satellite Infrared Radiance Observations for Convection-Allowing Ensemble Analysis and Prediction of Severe Thunderstorms. Mon. Weather Rev. 2019, 147, 4389–4409. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, F.; Stensrud, D.J. Assimilating All-Sky Infrared Radiances from GOES-16 ABI Using an Ensemble Kalman Filter for Convection-Allowing Severe Thunderstorms Prediction. Mon. Weather Rev. 2018, 146, 3363–3381. [Google Scholar] [CrossRef]
- Minamide, M.; Zhang, F. Adaptive Observation Error Inflation for Assimilating All-Sky Satellite Radiance. Mon. Weather Rev. 2017, 145, 1063–1081. [Google Scholar] [CrossRef]
- Minamide, M.; Zhang, F. An Adaptive Background Error Inflation Method for Assimilating All-Sky Radiances. Q. J. R. Meteorol. Soc. 2019, 145, 805–823. [Google Scholar] [CrossRef]
- Xu, Q.; Wei, L.; Lu, H.; Qiu, C.; Zhao, Q. Time-Expanded Sampling for Ensemble-Based Filters: Assimilation Experiments with a Shallow-Water Equation Model. J. Geophys. Res. Atmos. 2008, 113, D02114. [Google Scholar] [CrossRef]
- Xu, Q.; Lu, H.; Gao, S.; Xue, M.; Tong, M. Time-Expanded Sampling for Ensemble Kalman Filter: Assimilation Experiments with Simulated Radar Observations. Mon. Weather Rev. 2008, 136, 2651–2667. [Google Scholar] [CrossRef]
- Huang, B.; Wang, X. On the Use of Cost-Effective Valid-Time-Shifting (VTS) Method to Increase Ensemble Size in the GFS Hybrid 4DEnVar System. Mon. Weather Rev. 2018, 146, 2973–2998. [Google Scholar] [CrossRef]
- Gasperoni, N.A.; Wang, X.; Wang, Y. Using a Cost-Effective Approach to Increase Background Ensemble Member Size within the GSI-Based EnVar System for Improved Radar Analyses and Forecasts of Convective Systems. Mon. Weather Rev. 2022, 150, 667–689. [Google Scholar] [CrossRef]
- Lu, H.; Xu, Q.; Yao, M.; Gao, S. Time-Expanded Sampling for Ensemble-Based Filters: Assimilation Experiments with Real Radar Observations. Adv. Atmos. Sci. 2011, 28, 743–757. [Google Scholar] [CrossRef]
- Zhao, Q.; Xu, Q.; Jin, Y.; McLay, J.; Reynolds, C. Time-Expanded Sampling for Ensemble-Based Data Assimilation Applied to Conventional and Satellite Observations. Weather Forecast. 2015, 30, 855–872. [Google Scholar] [CrossRef]
- Zhang, H.; Gao, J.; Xu, Q.; Ran, L. Applying Time-Expended Sampling to Ensemble Assimilation of Remote Sensing Data for Short-Term Predictions of Thunderstorms. Remote Sens. 2023, 15, 2358. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Duda, M.G.; Huang, X.-Y.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Version 3; National Center for Atmospheric Research, Mesoscale and Microscale Meteorology Division: Boulder, CO, USA, 2008.
- Liu, H.; Hu, M.; Ge, G.; Zhou, C.; Stark, D.; Shao, H.; Newman, K.; Whitaker, J. Ensemble Kalman Filter (EnKF). In User’s Guide Version 1.3-Compatible with GSI Community Release v3.7; NOAA/OAR/Global Systems Laboratory, Developmental Testbed Center: Boulder, CO, USA, 2018; Available online: https://dtcenter.org/community-code/ensemble-kalman-filter-system-enkf/documentation (accessed on 25 April 2023).
- Weng, F. Advances in Radiative Transfer Modeling in Support of Satellite Data Assimilation. J. Atmos. Sci. 2007, 64, 3799–3807. [Google Scholar] [CrossRef]
- Whitaker, J.S.; Hamill, T.M.; Wei, X.; Song, Y.; Toth, Z. Ensemble Data Assimilation with the NCEP Global Forecast System. Mon. Weather Rev. 2008, 136, 463–482. [Google Scholar] [CrossRef]
- Benjamin, S.G.; Weygandt, S.S.; Brown, J.M.; Hu, M.; Alexander, C.R.; Smirnova, T.G.; Olson, J.B.; James, E.P.; Dowell, D.C.; Grell, G.A.; et al. A North American Hourly Assimilation and Model Forecast Cycle: The Rapid Refresh. Mon. Weather Rev. 2016, 144, 1669–1694. [Google Scholar] [CrossRef]
- Mansell, E.R.; Ziegler, C.L.; Bruning, E.C. Simulated Electrification of a Small Thunderstorm with Two-Moment Bulk Microphysics. J. Atmos. Sci. 2010, 67, 171–194. [Google Scholar] [CrossRef]
- Gaspari, G.; Cohn, S.E. Construction of Correlation Functions in Two and Three Dimensions. Q. J. R. Meteorol. Soc. 1999, 125, 723–757. [Google Scholar] [CrossRef]
- Zhang, J.; Howard, K.; Langston, C.; Kaney, B.; Qi, Y.; Tang, L.; Grams, H.; Wang, Y.; Cockcks, S.; Martinaitis, S.; et al. Multi-Radar Multi-Sensor (MRMS) Quantitative Precipitation Estimation: Initial Operating Capabilities. Bull. Am. Meteorol. Soc. 2016, 97, 621–638. [Google Scholar] [CrossRef]
- Smith, T.M.; Lakshmanan, V.; Stumpf, G.J.; Ortega, K.L.; Hondl, K.; Cooooper, K.; Calhoun, K.M.; Kingfield, D.M.; Manrossossoss, K.L.; Toooomey, R.; et al. Multi-Radar Multi-Sensor (MRMS) Severe Weather and Aviation Products: Initial Operating Capabilities. Bull. Am. Meteorol. Soc. 2016, 97, 1617–1630. [Google Scholar] [CrossRef]
- Dowell, D.C.; Wicker, L.J. Additive Noise for Storm-Scale Ensemble Data Assimilation. J. Atmos. Ocean. Technol. 2009, 26, 911–927. [Google Scholar] [CrossRef]
- Wilks, D.S. Statistical Methods in the Atmospheric Sciences, 3rd ed.; International Geophysics Series; Academic Press: Cambridge, MA, USA, 2011; Volume 100, 704p. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Observation | Error SD | HL Radius in km | VL Depth in ln(po/p) |
|---|---|---|---|
| Temperature | 1.5 (K) | 60 | 0.85 |
| Dewpoint | 2.0 (K) | 60 | 0.85 |
| U wind | 1.75 (m/s) | 60 | 0.85 |
| V wind | 1.75 (m/s) | 60 | 0.85 |
| Pressure | 1.0 hPa | 60 | 0.85 |
| Reflectivity | 7 (dBZ) | 18 | 0.8 |
| Radial velocity | 3 (m/s) | 18 | 0.8 |
| BT73-clear | 1.75 (K) | 36 | 4.0 |
| BT73-cloudy | 3.5 (K) | 36 | 4.0 |
| Experiment Name | Description | ||
|---|---|---|---|
| Assimilated Obs. | Obs. Error SD of TB73 | Inflation | |
| E-CONV | Conventional obs. (from Oklahoma Mesonet) | RTPS: 0.9 | |
| E-RADAR | Conv + Radar (reflectivity and radial wind) | RTPS: 0.9 | |
| E-BT73 | Conv + Radar + TB73 | Clear-sky: 1.75 K Cloudy-sky: 3.5 K | RTPS: 0.9 |
| E-AOEI | Conv + Radar + TB73 | AOEI | RTPS: 0.9 |
| E-AOBEI | Conv + Radar + TB73 | AOEI | ABEI + RTPS: 0.9 |
| Experiment Name | Description |
|---|---|
| E-BT73 | Ns = 36 without TES |
| TES225 | Ns = 12 with TES and τ = 225 s |
| TES300 | Ns = 12 with TES and τ = 300 s |
| TES450 | Ns = 12 with TES and τ = 450 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Xu, Q.; Jones, T.A.; Ran, L. Assimilating All-Sky Infrared Radiance Observations to Improve Ensemble Analyses and Short-Term Predictions of Thunderstorms. Remote Sens. 2023, 15, 2998. https://doi.org/10.3390/rs15122998
Zhang H, Xu Q, Jones TA, Ran L. Assimilating All-Sky Infrared Radiance Observations to Improve Ensemble Analyses and Short-Term Predictions of Thunderstorms. Remote Sensing. 2023; 15(12):2998. https://doi.org/10.3390/rs15122998
Chicago/Turabian StyleZhang, Huanhuan, Qin Xu, Thomas A. Jones, and Lingkun Ran. 2023. "Assimilating All-Sky Infrared Radiance Observations to Improve Ensemble Analyses and Short-Term Predictions of Thunderstorms" Remote Sensing 15, no. 12: 2998. https://doi.org/10.3390/rs15122998
APA StyleZhang, H., Xu, Q., Jones, T. A., & Ran, L. (2023). Assimilating All-Sky Infrared Radiance Observations to Improve Ensemble Analyses and Short-Term Predictions of Thunderstorms. Remote Sensing, 15(12), 2998. https://doi.org/10.3390/rs15122998