Urban activities are one of the main sources of emissions of greenhouse gases (GHG): an estimated 75% of GHG emissions occur in cities, with transportation and buildings as the main contributors [
1]. In the context of the energy transition, the implementation of alternative technologies based on renewable energy for transport is considered a key solution. In the automotive industry, the electrification of transport is one of the key measures for decarbonization and a reduction in GHG emissions in urban areas [
2]. In the year 2020, the sales of electric vehicles reached a record number of 3 million, implying a 40% increase regarding 2019, as stated by the International Energy Agency [
3]. According to the automotive outlook, the sales of electric vehicles in 2030 for a NetZero scenario will reach 60.9%, in contrast to the 4.3% registered in 2020 [
4]. Within the electrification of vehicles, one of the main efforts is focused on the modernization of vehicles dedicated to public transport, since these are vehicles with long usability. Public transportation not only allows for the improvement of urban mobility and the avoidance of traffic congestion, but it also contributes to the reduction in gas emissions and noise in cities, provided that its use avoids the use of individual transport. In addition, the use of public transport is generally more economic than the use of private vehicles, avoiding complementary costs such as fuel prices, maintenance, insurance, parking, and others.
1.1. Evolution of Electric Buses in the World: A Review
According to the data compiled by the Global EV Outlook 2021, the electrification of transport presents different rhythms between countries [
5]. China is the country dominating the market of electric buses, with the registration of 780,000 new vehicles in the year 2020. In this year, the number of electric buses sold in Europe was 2100, while in North America only 580 electric buses were registered. Regarding South America, Chile is the country leading the market, with 400 new electric buses in 2020. For its part, India had a 34% increase in the registration of electric buses, with 600 new vehicles in 2020.
In terms of cities, Shenzen (China) was the first city in the world to electrify the totality of its bus fleet, with a total of 16,000 electric buses [
6]. Delhi (India) is another example of an Asian city with an important investment in electric buses, with 1000 electric buses. Regulations by the European Union in the last year have led to an increase in the number of lines with electric buses in European cities. Forty cities, including Paris, Berlin, London, Copenhagen, Barcelona, Rome, and Rotterdam have signed the C40 Declaration for streets free of fossil fuels, with the aim of having a zero-emissions bus fleet in 2025 [
7]. They are also involved in ZeEUSS, which is one of the most ambitious programs developed in Europe regarding the electrification of urban transport [
8]. Data from Transport and Environment [
9] show the implementation level of the fleet of urban buses in Europe, with the Netherlands as the leading country: in 2020, the Netherlands was stated to have more than 1000 electric buses in operation [
10].
1.2. State of the Art of Methodologies for Implementation of E-Buses
There are many research lines regarding the implementation of electric buses [
11,
12,
13,
14,
15,
16]. This process has several sources of complexity: technical, economic, and environmental. The introduction of electric buses in a network of public transport requires several previous studies [
17]. As stated in [
18], the most significant parameters for the evaluation of the energy demand and the performance of electric buses are nominal vehicle consumption, climate conditions, and orography. From these parameters, orography has been identified as the most influential in different studies: [
19] evaluates the impact of street slopes in the energy consumption of electric buses by combining GNSS tracking and a digital elevation model in Japan. The results confirm that the consideration of orography implies an improvement regarding the energy consumption forecasting. The authors in [
20] reinforce this conclusion by analyzing the improvement that the consideration of the slope has in the forecasting of the battery consumption and consequently of the energy consumption. In order to quantify the impact of slopes in the energy consumption of electric buses, [
21] evaluates consumption data from real vehicles.
Three-dimensional data are the main source of information for the determination of the orography of the terrain. These data can be obtained from different sensors [
22], among which LiDAR is the most used in several fields of study, such as water [
23], forest [
24], mobility [
25], and energy studies [
26]. Several pieces of research use LiDAR products to analyze terrain parameters. Sharma et al. [
27] estimated some terrain parameters such as the digital surface model (DSM), bare earth model (BEM), slope, aspect, curvature, and terrain ruggedness index (TRI) from airborne LiDAR data of the Russian St. Petersburg region. Urbazaev et al. [
28] evaluated the estimation of terrain elevation from ICESat-2 and GEDI spaceborne LiDAR missions on different land cover and forest types located in Brazil, Germany, South Africa, and the United States. As [
29] shows in their research, LiDAR-derived digital terrain indices and machine learning are applied for high-resolution national-scale soil moisture mapping of the Swedish forest landscape. LiDAR data are also used in combination with other products to analyze the terrain. The authors in [
30] investigated how DEM resolution affects the accuracy of terrain representations and consequently the performance of the SWAT hydrological model in simulating streamflow for a terraced eucalypt-dominated catchment (Portugal). For this research, multi-resolution DEMs (10 m, 1 m, 0.5 m, 0.25 m, and 0.10 m) based on photogrammetric techniques and LiDAR data were used. Digital image correlation from airborne optic and LiDAR datasets detected recent large-scale landslide dynamics in South Tyrol (Italy) [
31]. In the forest environment, [
32] explores the potential of LiDAR and Sentinel-2 data to model the post-fire structural characteristics of gorse shrublands in northwest Spain.
Since these studies require data acquisition on a large scale, LiDAR sensors are commonly mounted on vehicles, both terrestrial as in the case of mobile mapping systems and aerial such as airplanes, helicopters, and drones. The main differences between terrestrial and aerial platforms are the point of view (immersive in the first case and vertical in the second case) and the resolution, which increases with the distance between sensor and terrain: point clouds acquired with mobile mapping systems usually have higher spatial resolution than point clouds from UAV-mounted sensors, which in turn present higher spatial resolution than those from helicopters and airplanes. In addition, if economic costs are taken into account, lower-resolution products are much more affordable for the general user since they are the type usually provided by national agencies (as in the case of Spain [
33,
34]), while high-resolution point clouds are acquired by dedicated mobile mapping campaigns involving a high cost of use [
35]. Although mobile mapping technology is evolving with the use of low-cost systems [
36], their need for specific services implies a higher cost than the use of point clouds from general purposes campaigns.
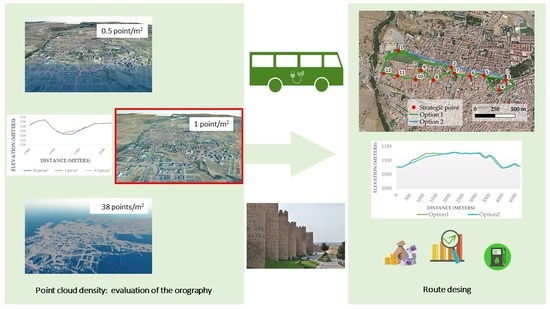
In this context, this paper presents an evaluation of the impact of the spatial resolution of point clouds for the estimation of street slopes, based on the analysis of point clouds acquired from different platforms (aerial and terrestrial). The results of the optimal point cloud density are applied to a problem of route optimization, searching for the most efficient route (the route with the lowest steep slopes). Both studies are performed through their application to the case study of the city of Ávila, selected because of it being a city that is representative of cities with varied orography.


 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}