
Space-Based THz Radar Fly-Around Imaging Simulation for Space Targets Based on Improved Path Tracing

Abstract
:1. Introduction
- (1)
- This paper proposes a path-tracing-based radar echo simulation method, which includes the phase factor related to the path length and multiple path energy scattering based on the THz-BRDF model.
- (2)
- Based on Kirchhoff’s approximate scattering field theory, the scattering characteristics of several typical materials at 0.215 THz are analyzed and the multi-parameter THz-BRDF models are fitted according to the theoretical calculation data.
- (3)
- Based on the proposed simulation method, we analyze the influence of several typical in-orbit fly-around motions on the imaging process. The simulation results of space-based THz radar imaging for given target models are presented, providing support for the construction of radar image datasets.
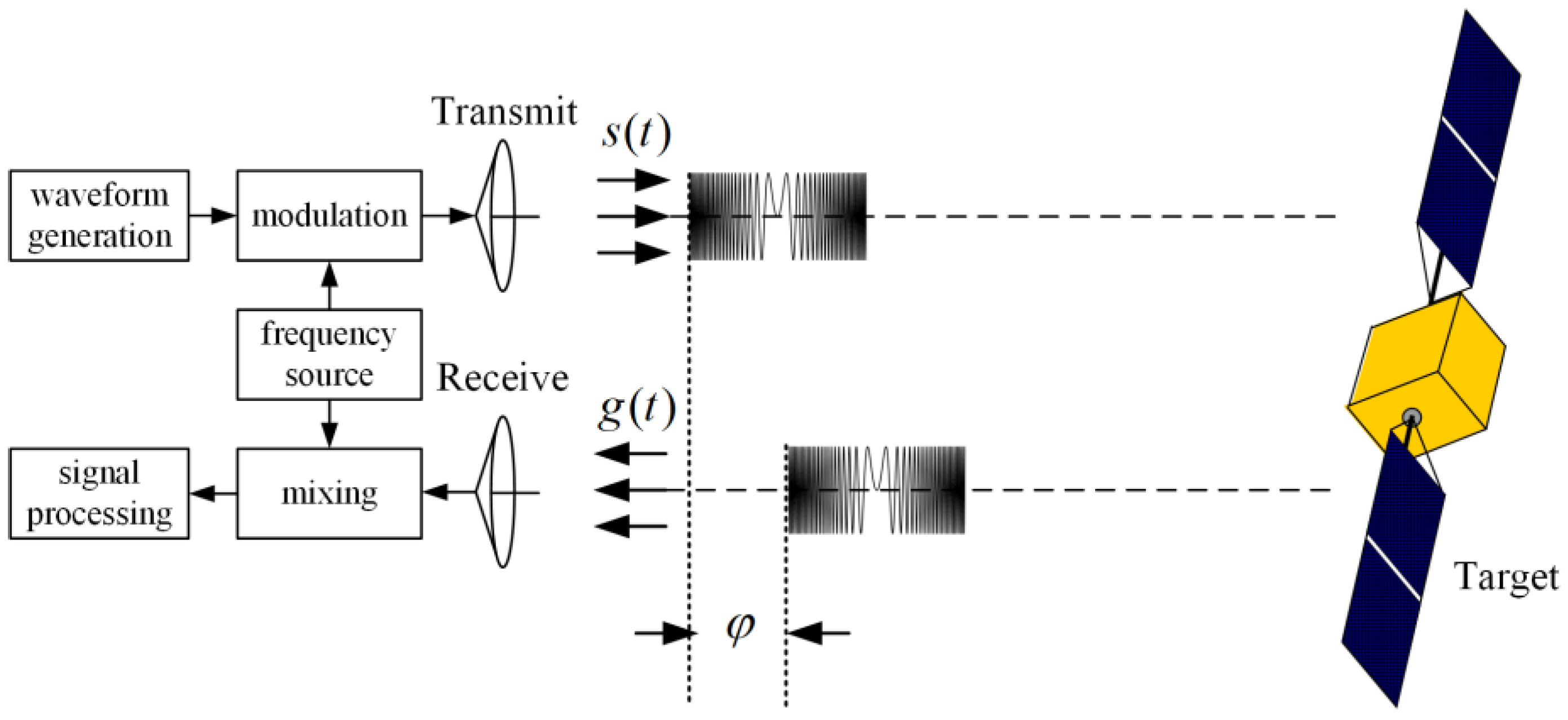
2. Imaging Mechanism of Broadband THz Radars
3. THz Scattering Properties
3.1. Scattering Coefficient Calculation Based on the Kirchhoff Approximation
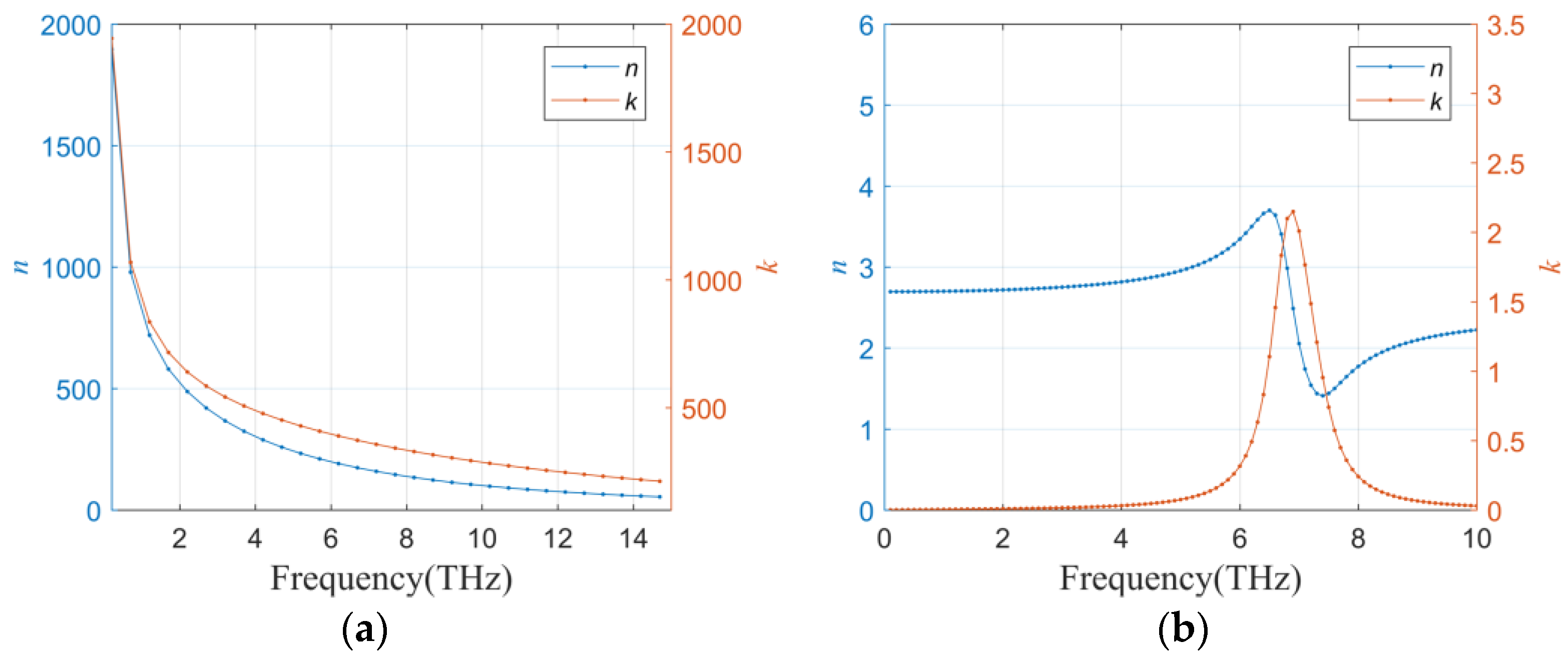
3.2. Complex Refractive Index Calculations
3.3. Multi-Parameter THz-BRDF Model Construction
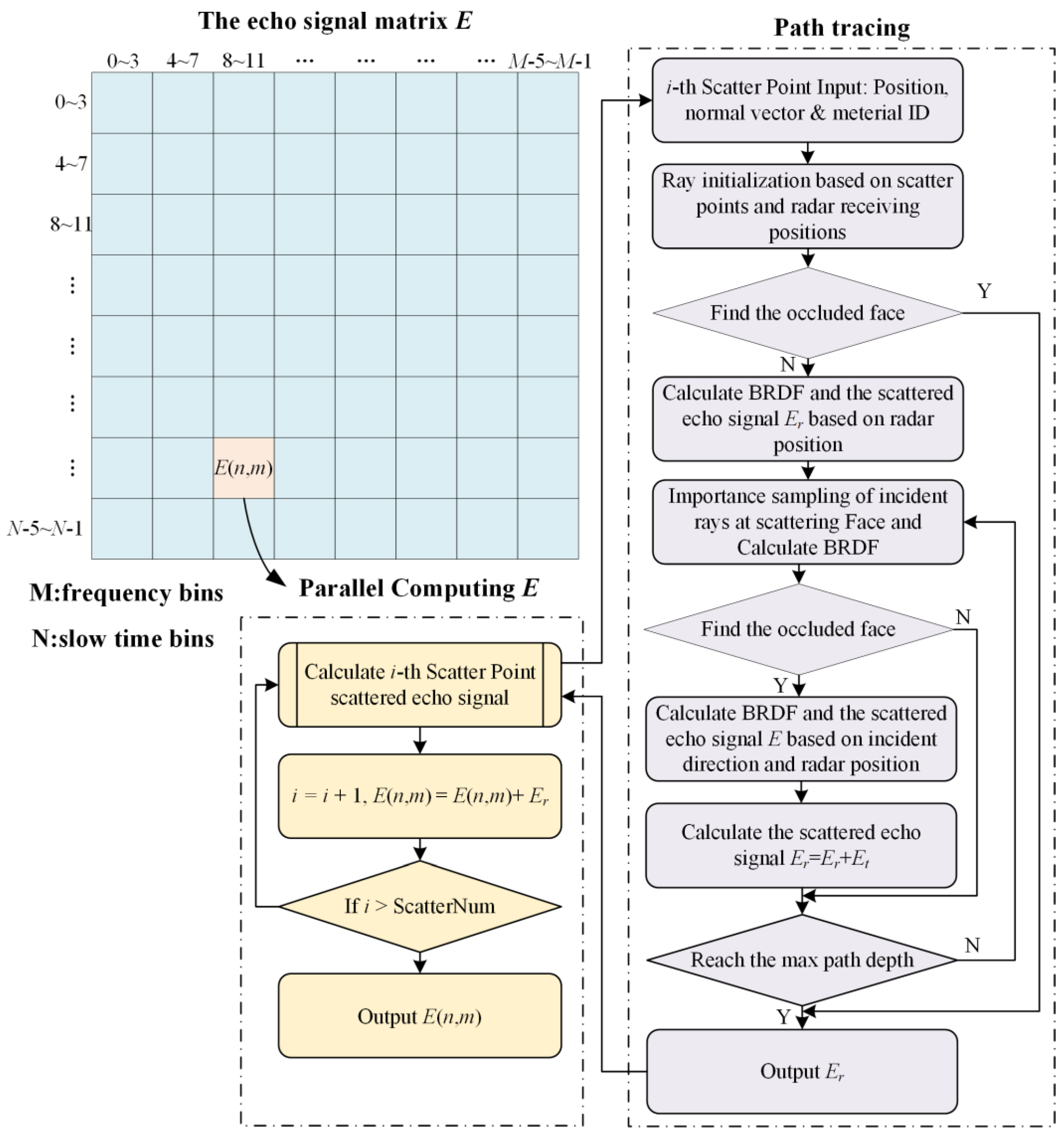
4. THz Radar Imaging Simulation Based on the Improved Path Tracing Algorithm
5. THz Radar Imaging Simulation Experiment and Discussion
5.1. Simulation Input Conditions
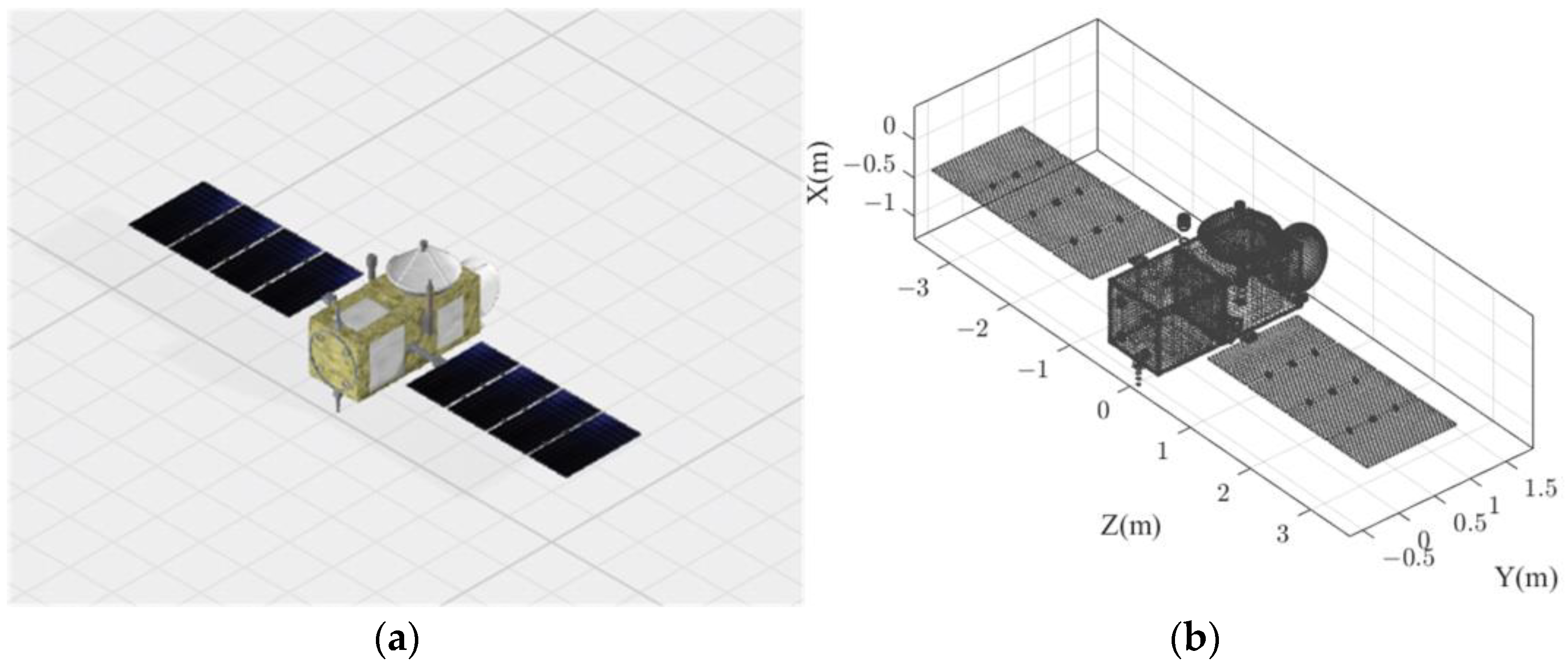
5.1.1. Geometric Processing of the Target 3D Model
5.1.2. THz Radar Parameters
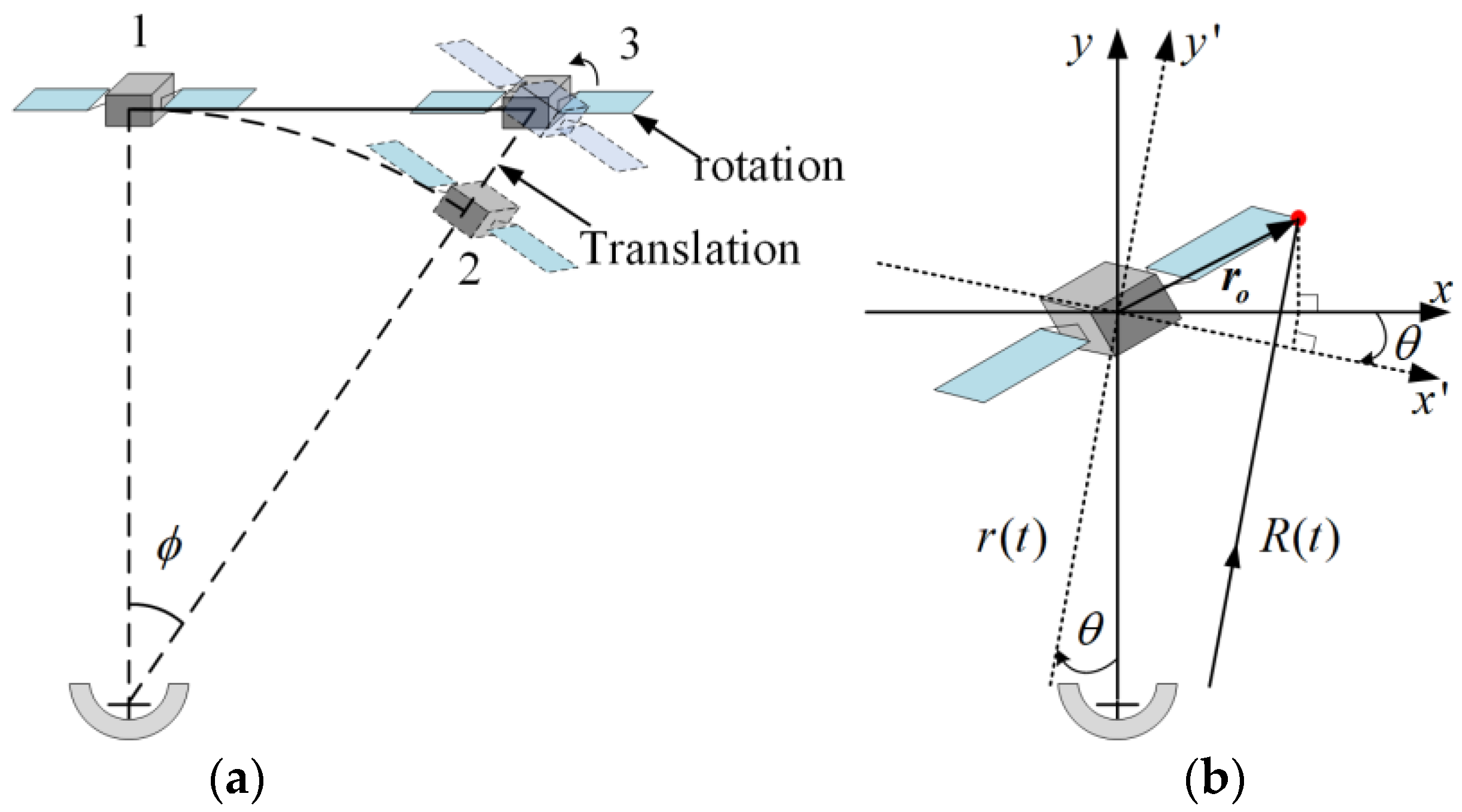
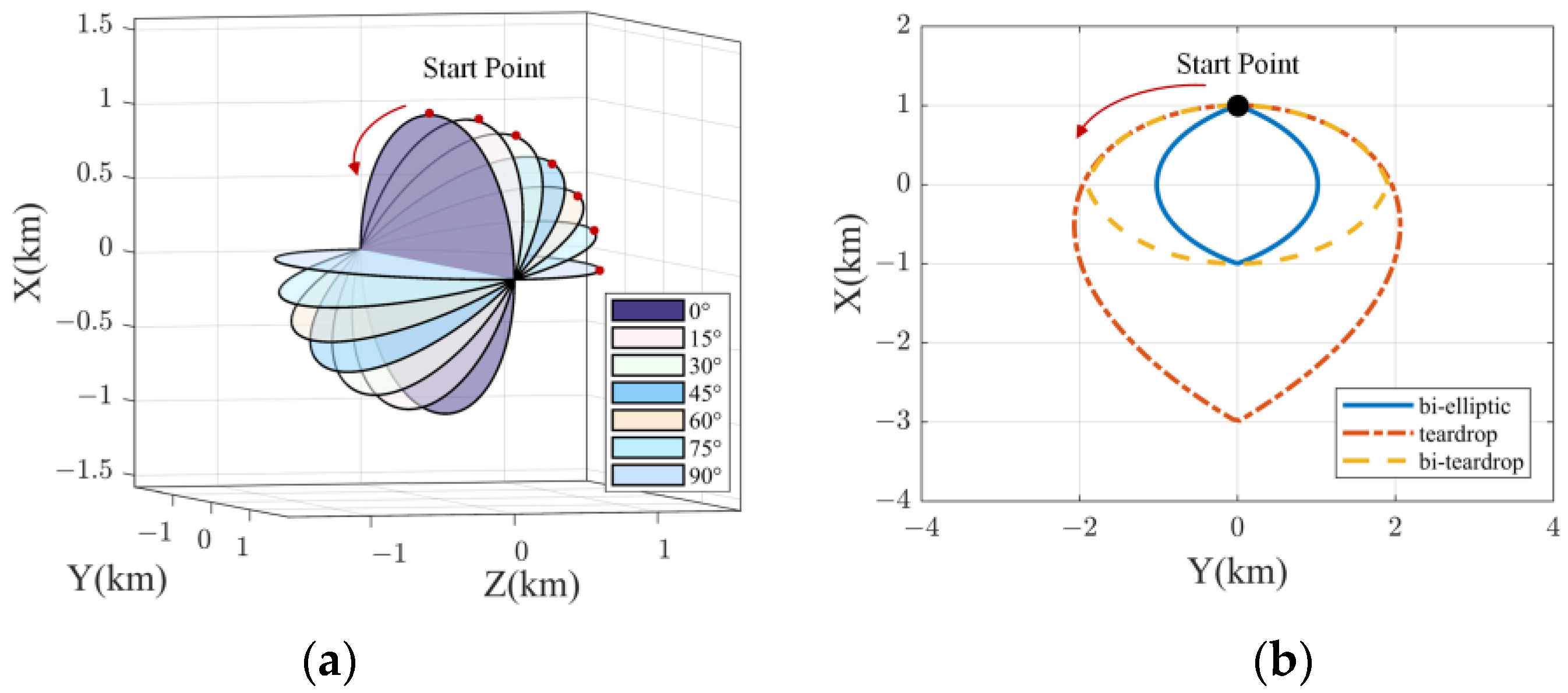
5.1.3. On-Orbit Relative Motion Model
5.2. Effects on Imaging Process of Different Fly-Around Formations
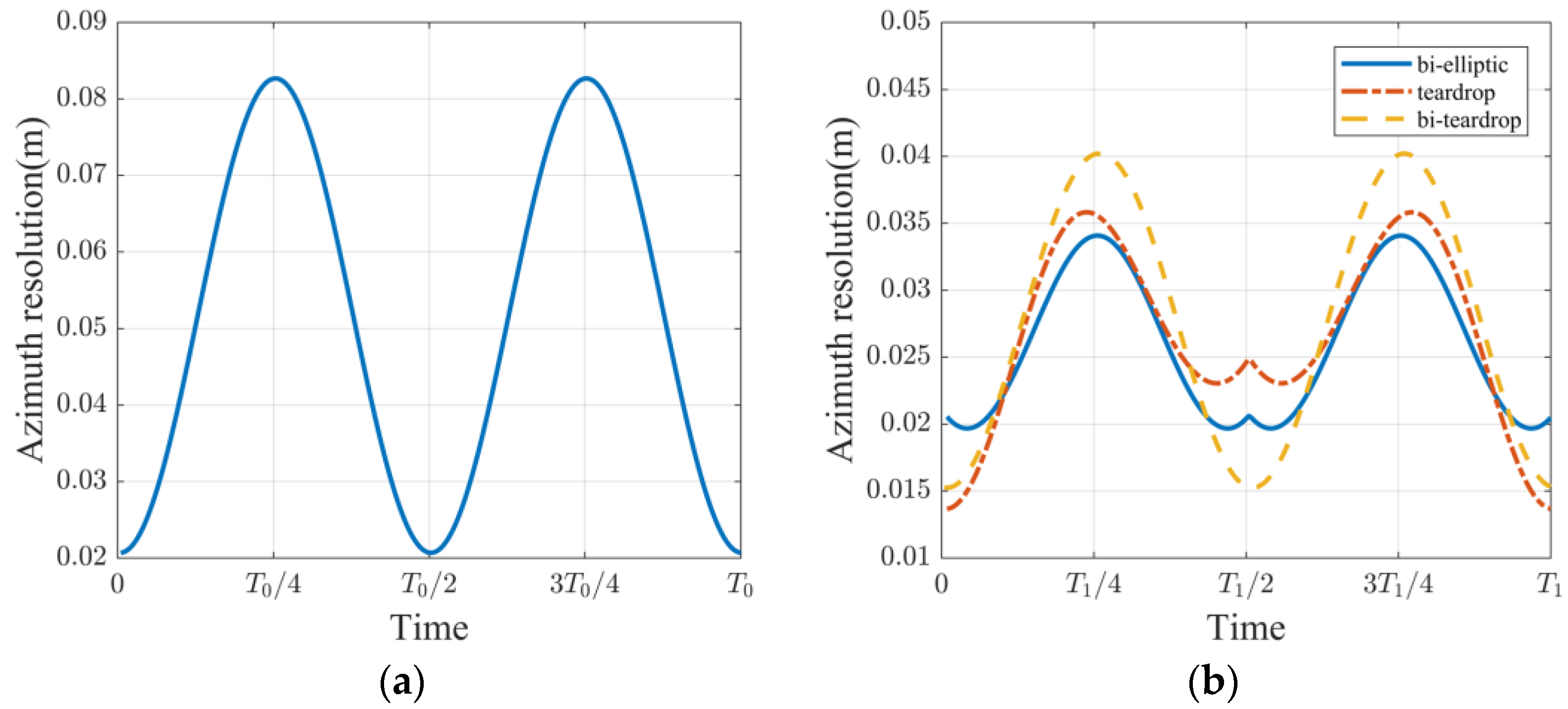
5.2.1. Azimuth Resolution
5.2.2. RCS
5.2.3. Range Migration
5.3. The Results of Imaging Simulation
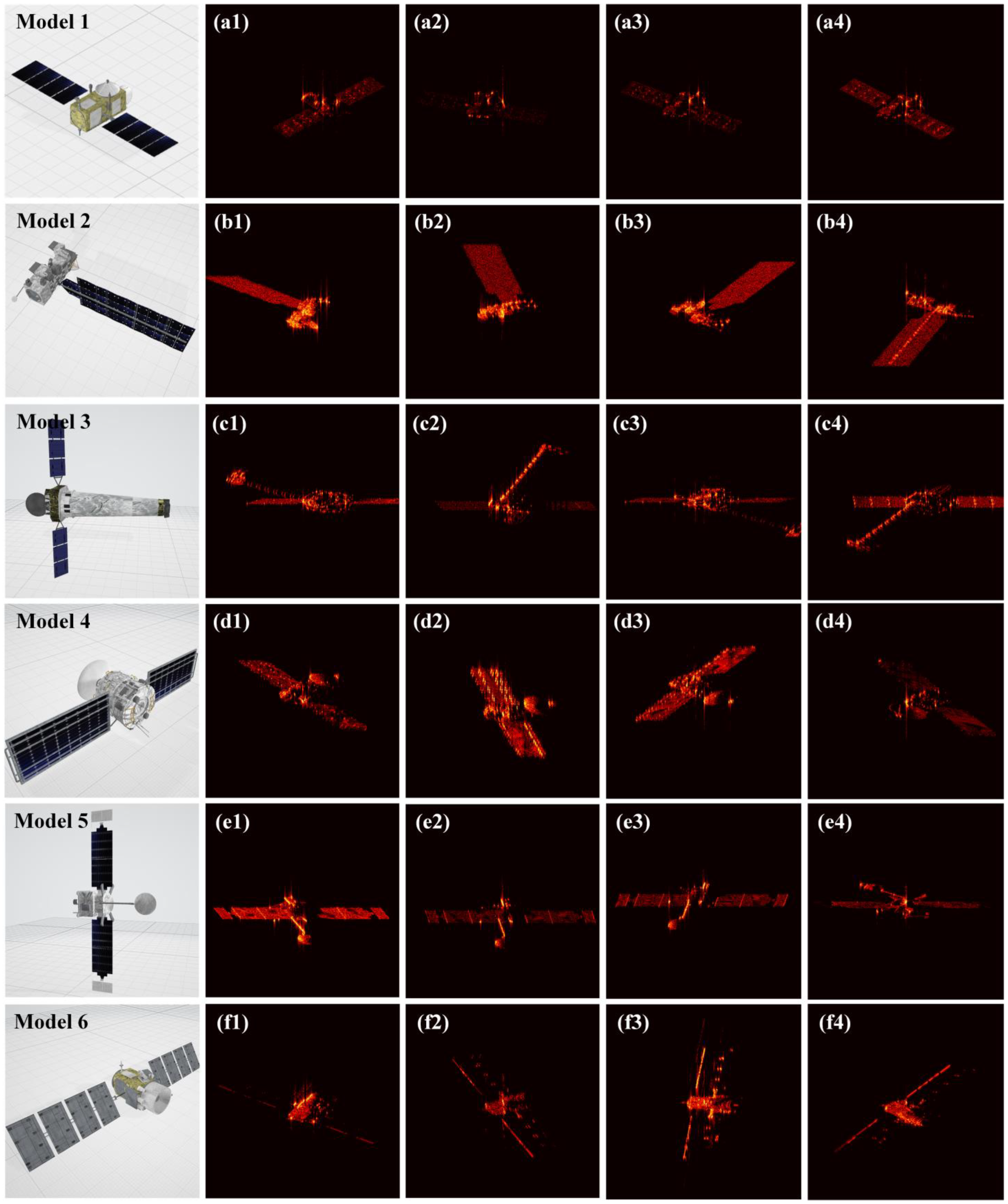
5.3.1. Results for a Single Frame
5.3.2. Comparison and Discussion
5.3.3. Dataset Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Scott, R.; Thorsteinson, S. Key Findings from the NEOSSat Space-Based SSA Microsatellite Mission. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 11–14 September 2018; Available online: www.amostech.com (accessed on 26 May 2023).
- Ender, J.; Leushacke, L.; Brenner, A.; Wilden, H. Radar techniques for space situational awareness. In Proceedings of the 2011 12th International Radar Symposium (IRS), Leipzig, Germany, 7–9 September 2011; pp. 21–26. [Google Scholar]
- Yunpeng, H.; Kebo, L.; Yan’gang, L.; Lei, C. Review on strategies of space-based optical space situational awareness. J. Syst. Eng. Electron. 2021, 32, 1152–1166. [Google Scholar] [CrossRef]
- Speretta, S. Space Surveillance Network Capabilities Evaluation Mission. In Proceedings of the 2nd NEO and Debris Detection Conference, Darmstadt, Germany, 24–26 January 2023; Available online: https://conference.sdo.esoc.esa.int/proceedings/neosst2/paper/127/NEOSST2-paper127.pdf (accessed on 26 May 2023).
- Czerwinski, M.G.; Usoff, J.M. Development of the Haystack Ultrawideband Satellite Imaging Radar. Linc. Lab. J. 2014, 21, 28–44. [Google Scholar]
- Cerutti-Maori, D.; Rosebrock, J.; Carloni, C.; Budoni, M.; Maouloud, I.; Klare, J. A Novel High-Precision Observation Mode for the Tracking and Imaging Radar TIRA—Principle and Performance Evaluation. In Proceedings of the 8th European Conference on Space Debris (Virtual), ESA/ESOC, Darmstadt, Germany, 20–23 April 2021; Available online: https://conference.sdo.esoc.esa.int/proceedings/sdc8/paper/221/SDC8-paper221.pdf (accessed on 26 May 2023).
- Marchetti, E.; Stove, A.G.; Hoare, E. Space-Based Sub-THz ISAR for Space Situational Awareness-Laboratory Validation. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4409–4422. [Google Scholar] [CrossRef]
- Božanić, M.; Sinha, S. Emerging Transistor Technologies Capable of Terahertz Amplification: A Way to Re-Engineer Terahertz Radar Sensors. Sensors 2019, 19, 2454. [Google Scholar] [CrossRef] [Green Version]
- Valušis, G.; Lisauskas, A.; Yuan, H.; Knap, W.; Roskos, H.G. Roadmap of Terahertz Imaging 2021. Sensors 2021, 21, 4092. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Yang, Q.; Deng, B.; Qin, Y.; Wang, H. Estimation of Translational Motion Parameters in Terahertz Interferometric Inverse Synthetic Aperture Radar (InISAR) Imaging Based on a Strong Scattering Centers Fusion Technique. Remote Sens. 2019, 11, 1221. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Zhong, K.; Liu, C.; Xu, D.; Shi, W.; Yao, J. Optical coefficients extraction from terahertz time-domain transmission spectra based on multibeam interference principle. Opt. Eng. 2017, 56, 044101. [Google Scholar] [CrossRef]
- Di Simone, A.; Fuscaldo, W.; Millefiori, L.M.; Riccio, D.; Ruello, G.; Braca, P.; Willett, P. Analytical Models for the Electromagnetic Scattering from Isolated Targets in Bistatic Configuration: Geometrical Optics Solution. IEEE Trans. Geosci. Remote Sens. 2020, 58, 861–880. [Google Scholar] [CrossRef]
- Potter, L.C.; Chiang, D.-M.; Carriere, R.; Gerry, M.J. A GTD-based parametric model for radar scattering. IEEE Trans. Antennas Propag. 1995, 43, 1058–1067. [Google Scholar] [CrossRef]
- Asvestas, J.S. The physical optics method in electromagnetic scattering. J. Math. Phys. 1980, 21, 290–299. [Google Scholar] [CrossRef]
- Tian, G.; Tong, C.; Sun, H.; Zou, G.; Liu, H. Improved Hybrid Algorithm for Composite Scattering from Multiple 3D Objects Above a 2D Random Dielectric Rough Surface. IEEE Access 2020, 9, 4435–4446. [Google Scholar] [CrossRef]
- Boag, A. A fast physical optics (FPO) algorithm for high frequency scattering. IEEE Trans. Antennas Propag. 2004, 52, 197–204. [Google Scholar] [CrossRef]
- Garcia-Fernandez, A.F.; Yeste-Ojeda, O.A.; Grajal, J. Facet model of moving targets for ISAR imaging and radar back-scattering simulation. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1455–1467. [Google Scholar] [CrossRef]
- Kulpa, K.S.; Samczynski, P.; Malanowski, M.; Gromek, A.; Gromek, D.; Gwarek, W.; Salski, B.; Tanski, G. An Advanced SAR Simulator of Three-Dimensional Structures Combining Geometrical Optics and Full-Wave Electromagnetic Methods. IEEE Trans. Geosci. Remote Sens. 2014, 52, 776–784. [Google Scholar] [CrossRef]
- Wang, F.; Eibert, T.F.; Jin, Y.-Q. Simulation of ISAR Imaging for a Space Target and Reconstruction under Sparse Sampling via Compressed Sensing. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3432–3441. [Google Scholar] [CrossRef]
- Chiang, C.-Y.; Chen, K.-S.; Yang, Y.; Zhang, Y.; Zhang, T. SAR Image Simulation of Complex Target including Multiple Scattering. Remote Sens. 2021, 13, 4854. [Google Scholar] [CrossRef]
- Wu, K.; Jin, G.; Xiong, X.; Zhang, H.; Wang, L. SAR Image Simulation Based on Effective View and Ray Tracing. Remote Sens. 2022, 14, 5754. [Google Scholar] [CrossRef]
- Gao, J.; Deng, B.; Qin, Y. Radar echo scattering modeling and image simulations of full-scale convex rough targets at terahertz frequencies. J. Radars 2018, 7, 97–107. [Google Scholar] [CrossRef]
- Mou, Y.; Sheng, X.; Gao, Y. Bidirectional reflection distribution function modeling (BRDF) for terahertz diffuse scattering analysis of dielectric rough targets. Infrared. Phys. Technol. 2019, 101, 171–179. [Google Scholar] [CrossRef]
- Marchetti, E.; Stove, A.G.; Hoare, E.G. Space-based Sub-THz ISAR for Space Situational Awareness Concept and Design. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 1558–1573. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, X.; Jiang, X. Attitude direction estimation of space target parabolic antenna loads using sequential terahertz ISAR images. J. Infrared Millim. Waves. 2021, 40, 496–507. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing, Active and Passive: Volume II, Radar Remote Sensing and Surface Scattering and Emission Theory; Artech House: London, UK, 1982; pp. 304–307. [Google Scholar]
- Mou, Y.; Wu, Z.S.; Zhang, G.; Gao, Y.Q.; Yang, Z.Q. Establishment of THz dispersion model of metals based on Kramers-Kronig relation. Acta Phys. Sin. 2017, 66, 120202. [Google Scholar] [CrossRef]
- Shi, J.H.; Dong, G.H.; Xu, W.X.; Wang, Y.; Sun, M.; Li, Y.; Zhu, Z.; Lubo. Optically controlled Fano resonance in hybrid fishscale metamaterial. J. Terahertz Sci. Electron. Inf. Technol. 2022, 20, 566. [Google Scholar] [CrossRef]
- Ding, Z.; Han, Y. Infrared characteristics of satellite based on bidirectional reflection distribution function. Infrared Phys. Technol. 2019, 97, 93–100. [Google Scholar] [CrossRef]
- Wang, H.; Chen, Y. Modeling and simulation of infrared dynamic characteristics of space-based space targets. Infrared Laser Eng. 2016, 45, 0504002. [Google Scholar] [CrossRef]
- Torrance, K.E.; Sparrow, E.M. Theory for off-specular reflection from roughened surfaces. J. Opt. Soc. Am. 1967, 57, 1105–1114. [Google Scholar] [CrossRef]
- Yang, Y.F.; Wu, Z.S.; Cao, Y.H. Practical six-parameter bidirectional reflectance distribution function model for rough surface. Acta Opt. Sin. 2012, 32, 0229001. [Google Scholar] [CrossRef]
- Chen, V.C. Inverse Synthetic Aperture Radar Imaging: Principles, Algorithms and Applications; Institution of Engineering and Technology: Stevenage, UK, 2014; pp. 77–94. [Google Scholar]
- Zhang, R.; Yin, J.; Han, C. Spacecraft forced fly-around formation design and control. J. Beijing Univ. Aeronaut. Astronaut. 2017, 43, 2030. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhang, L.; Cao, Y. Optical-and-radar image fusion for dynamic estimation of spin satellites. IEEE Trans. Image Process. 2019, 29, 2963–2976. [Google Scholar] [CrossRef]
- Du, R.; Liu, L.; Bai, X. Instantaneous attitude estimation of spacecraft utilizing joint optical-and-ISAR observation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5112114. [Google Scholar] [CrossRef]
- Zhou, Y.; Xie, P.; Li, C. Automatic Dynamic Estimation of On-orbit Satellites through Spaceborne ISAR Imaging. IEEE Trans. Radar Syst. 2023, 1, 43. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | |
|---|---|
| Aluminum metal | (1826.9, 1876.7) |
| White-painted aluminum metal | (2.7, 7.4 × 10−4) |
| Polyimide film | (3.0, 9.0 × 10−3) |
| Material | kb | kr | b | a | kd | c | e (%) |
|---|---|---|---|---|---|---|---|
| Al | 5.2495 | 19.0883 | −77.2494 | 1.1238 | 0.00205 | 1.1499 | 1.73 |
| White-painted Al | 1.2935 | 23.7594 | −24.0432 | 0.80228 | 0.0132 | 2.6715 | 2.73 |
| Polyimide film | 0.8260 | 0.6441 | −49.7640 | 0.9767 | 0.007069 | 7.7509 | 3.67 |
| Component | Material |
|---|---|
| Satellite panel | Aluminum metal |
| Antenna and connector | White-painted aluminum metal |
| Satellite body | Polyimide film |
| Parameters | Value |
|---|---|
| Center frequency | 0.215 THz |
| Bandwidth | 10 GHz |
| Coherent processing interval (CPI) | 0.0165 s |
| Coherent integration time (CIT) | 16.92 s |
| Number of range samples M | 1024 |
| Number of samples in azimuth direction N | 1024 |
| Peak transmission power | 10 W |
| Antenna gain | 51.96 dB |
| Parameters | The 10th Frame | The 15th Frame | The 20th Frame | |||
|---|---|---|---|---|---|---|
| FPO | Ours | FPO | Ours | FPO | Ours | |
| Grayscale Mean | 117.29 | 30.88 | 177.26 | 28.98 | 172.33 | 29.14 |
| Grayscale Variance | 619.01 | 657.96 | 546.33 | 582.14 | 453.00 | 727.31 |
| Entropy | 4.19 | 4.59 | 4.16 | 4.67 | 4.07 | 4.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ning, Q.; Wang, H.; Yan, Z.; Liu, X.; Lu, Y. Space-Based THz Radar Fly-Around Imaging Simulation for Space Targets Based on Improved Path Tracing. Remote Sens. 2023, 15, 4010. https://doi.org/10.3390/rs15164010
Ning Q, Wang H, Yan Z, Liu X, Lu Y. Space-Based THz Radar Fly-Around Imaging Simulation for Space Targets Based on Improved Path Tracing. Remote Sensing. 2023; 15(16):4010. https://doi.org/10.3390/rs15164010
Chicago/Turabian StyleNing, Qianhao, Hongyuan Wang, Zhiqiang Yan, Xiang Liu, and Yinxi Lu. 2023. "Space-Based THz Radar Fly-Around Imaging Simulation for Space Targets Based on Improved Path Tracing" Remote Sensing 15, no. 16: 4010. https://doi.org/10.3390/rs15164010