
Rapid Detection of Iron Ore and Mining Areas Based on MSSA-BNVTELM, Visible—Infrared Spectroscopy, and Remote Sensing


Abstract
:1. Introduction
- (1)
- The SSA is modified using the Lévy flight strategy and the random wandering strategy to increase the global search capability of the SSA;
- (2)
- The MSSA-BNVTELM is proposed by introducing the BN structure into the network structure of the VTELM and optimizing the parameters of the VTELM using MSSA;
- (3)
- In this paper, reflectance spectroscopy of ore is utilized with MSSA-BNVTELM to achieve rapid TFE detection of iron ore, which is helpful for accelerating the production of iron ore;
- (4)
- In this paper, the remote sensing data of the mining area and MSSA-BNVTELM are used to realize the rapid detection of TFE in the mining area, which is helpful for the development of mine opening plan and soil reclamation.
2. Materials and Methods
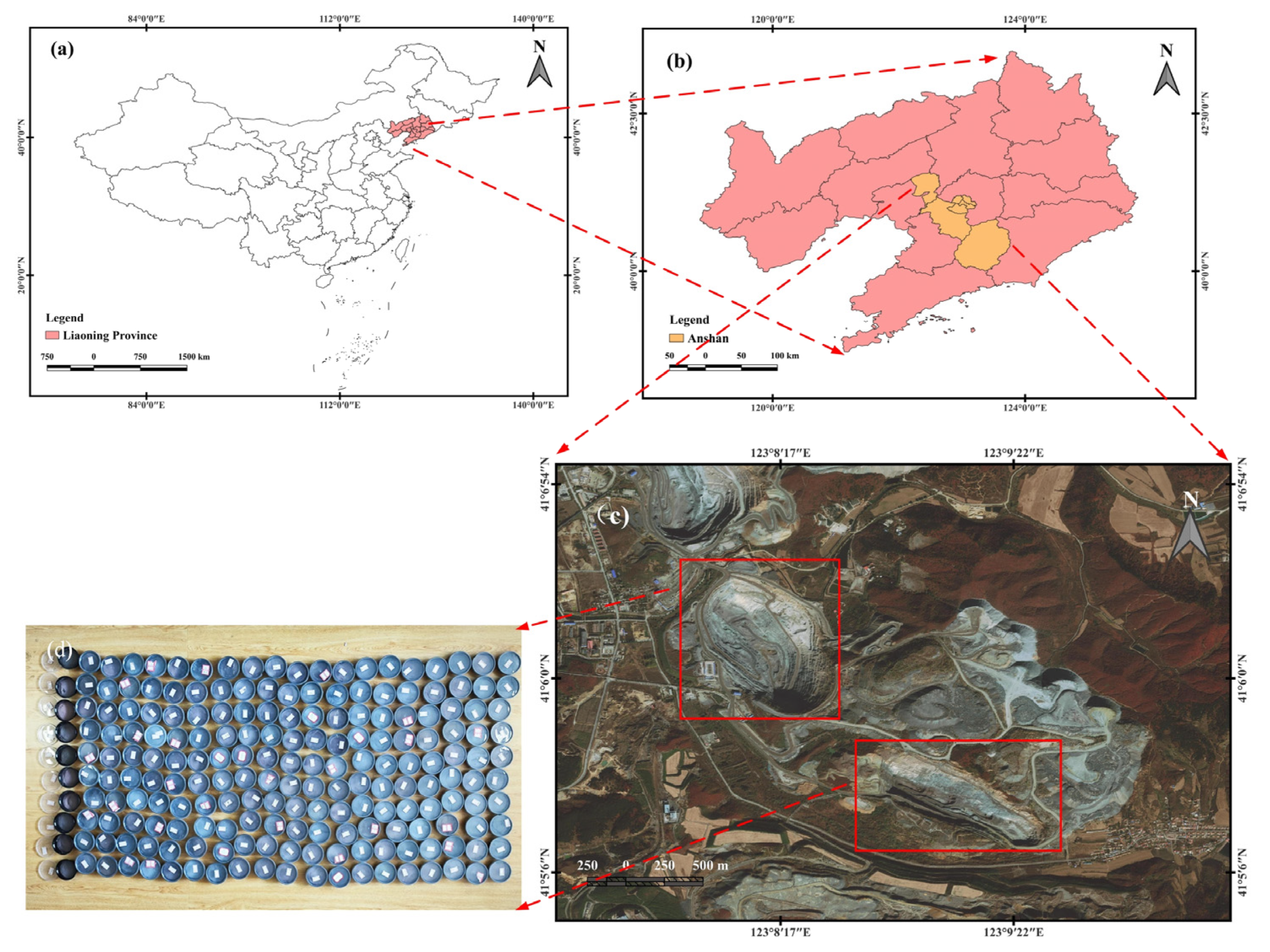
2.1. Study Area
2.2. Spectral Data
2.3. Remote Sensing Data
2.4. Wavelet Transform
2.5. MSSA
2.6. VTELM
2.7. MSSA-BNVTELM
| Algorithm 1 The algorithm flow of MSSA-BNVTELM | |
| 1 | W1, W2, B1, and B2 are initialized randomly as sparrow positions. |
| 2 | Set MSSA parameters, population size, number of iterations, expectation error e, etc. |
| 3 | The is solved according to Equation (12). |
| 4 | Calculate the fitness value of each sparrow according to Equation (19). |
| 5 | Update the discoverer location according to Equation (4). |
| 6 | The follower position is updated according to Equation (5). |
| 7 | Update the vigilante position according to Equation (7). |
| 8 | Performs random wandering or Lévy flight with probability 0.5. |
| 9 | Recalculate for the updated individuals |
| 10 | Calculate RMSE according to Equation (19). If RMSE < e, the update is stopped; otherwise, return to step 5. The algorithm also stops updating if the number of iterations reaches the set requirement. |
2.8. Uncertainty Analysis
3. Results and Discussion
3.1. WT and Feature Extraction
3.2. Comparison of MSSA and SSA
3.3. Hidden Layer Node Testing
3.4. Model Comparison
3.5. Remote Sensing Detection
3.6. Uncertainty Analysis of Detection Models
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yao, J.; Liu, C.; Huang, G.; Xu, K.; Yuan, Q. Multi-Source and Multi-Target Iron Ore Blending Method in Open Pit Mine. Arch. Min. Sci. 2022, 67, 631–644. [Google Scholar]
- Cao, Y.; Wu, S.; Han, H.; Wang, H.; Xue, F.; Liu, X. Mixed State and High Effective Utilization of Pilbara Blending Iron Ore Powder. J. Iron Steel Res. Int. 2011, 18, 1–5. [Google Scholar] [CrossRef]
- Cheng, Y.; Shen, Z.; Yang, Y.; Liang, Q.; Liu, H. Development of a Redox Microtitration Method for the Determination of Metallic Iron Content in Reduced Micron-Sized Iron Ore Concentrate Particles. Metall. Mater. Trans. B-Proc. Metall. Mater. Proc. Sci. 2022, 53, 807–815. [Google Scholar] [CrossRef]
- Hu, H.; Tang, Y.; Ying, H.; Wang, M.; Wan, P.; Yang, X.J. The Effect of Copper on Iron Reduction and Its Application to the Determination of Total Iron Content in Iron and Copper Ores by Potassium Dichromate Titration. Talanta 2014, 125, 425–431. [Google Scholar] [CrossRef] [PubMed]
- Xie, H.; Mao, Z.; Xiao, D.; Liu, J. Rapid Detection of Copper Ore Grade Based on Visible-Infrared Spectroscopy and TSVD-IVTELM. Measurement 2022, 203, 112003. [Google Scholar] [CrossRef]
- Singh, N.; Rashmi; Gupta, P.K. Measurements of major and minor constituents in sulphide ore by gravimetry followed by flame atomic absorption spectrometry. Rev. Anal. Chem. 2006, 25, 141–153. [Google Scholar] [CrossRef]
- Guatame-Garcia, A.; Buxton, M. The Use of Infrared Spectroscopy to Determine the Quality of Carbonate-Rich Diatomite Ores. Minerals 2018, 8, 120. [Google Scholar] [CrossRef]
- Prado, E.M.G.; Silva, A.M.; Ducart, D.F.; Toledo, C.L.B.; de Assis, L.M. Reflectance Spectroradiometry Applied to a Semi-Quantitative Analysis of the Mineralogy of the N4ws Deposit, Carajás Mineral Province, Pará, Brazil. Ore Geol. Rev. 2016, 78, 101–119. [Google Scholar] [CrossRef]
- Oluwaseye, F.I.; Iyakwari, S.; Idzi, A.A.; Kehinde, O.H.; Osu, U. Qualitative identification of copper bearing minerals using near infrared sensors. Physicochem. Probl. Miner. Process. 2016, 52, 620–633. [Google Scholar]
- Basile, A.; Hughes, J.; McFarlane, A.J.; Bhargava, S.K. Development of a Model for Serpentine Quantification in Nickel Laterite Minerals by Infrared Spectroscopy. Miner. Eng. 2010, 23, 407–412. [Google Scholar] [CrossRef]
- Li, W.J.; Pang, J.M. Application of Remote Sensing in Investigation of Geological Environment of Iron Mine. In Proceedings of the 2020 5th International Conference on Materials Science, Energy Technology and Environmental Engineering, Shanghai, China, 7–9 August 2020; Volume 571, p. 012079. [Google Scholar]
- Hai, W.J.; Xia, N.; Song, J.M.; Tang, M.Y. Identification and Monitoring of Surface Elements in Open-Pit Coal Mine Area Based on Multi-Source Remote Sensing Images. Pol. J. Environ. Stud. 2022, 31, 4127–4136. [Google Scholar] [CrossRef]
- Ali, N.; Fu, X.D.; Ashraf, U.; Chen, J.; Thanh, H.V.; Anees, A.; Riaz, M.S.; Fida, M.; Hussain, M.A.; Hussain, S.; et al. Remote Sensing for Surface Coal Mining and Reclamation Monitoring in the Central Salt Range, Punjab, Pakistan. Sustainability 2022, 14, 9835. [Google Scholar] [CrossRef]
- Li, H.K.; Xu, F.; Weng, X.Y. Recognition method for high-resolution remote-sensing imageries of ionic rare earth mining based on object-oriented technology. Arab. J. Geosci. 2020, 13, 1137. [Google Scholar] [CrossRef]
- Xiao, D.; Xie, H.; Fu, Y.; Li, F. Inversion of Low-Grade Copper Mining Areas Based on Spectral Information and Remote Sensing Data Using Vis-NIR. Spectroscopy 2022, 36, 30–37. [Google Scholar]
- Xiao, D.; Xie, H.; Fu, Y.; Li, F. Mine Reclamation Based on Remote Sensing Information and Error Compensation Extreme Learning Machine. Spectrosc. Lett. 2021, 54, 151–164. [Google Scholar] [CrossRef]
- Le, B.T.; Xiao, D.; Okello, D.; He, D.; Xu, J.; Doan, T.T. Coal Exploration Technology Based on Visible-Infrared Spectra and Remote Sensing Data. Spectrosc. Lett. 2017, 50, 440–450. [Google Scholar] [CrossRef]
- Ju, H.; Bi, F.; Bian, M.; Shi, Y. Multiscale Feature Fusion Network for Automatic Port Segmentation from Remote Sensing Images. J. Appl. Remote Sens. 2022, 16, 044506. [Google Scholar] [CrossRef]
- Chen, Y.N.; Fan, K.C.; Chang, Y.L.; Moriyama, T. Special Issue Review: Artificial Intelligence and Machine Learning Applications in Remote Sensing. Remote Sens. 2023, 15, 569. [Google Scholar] [CrossRef]
- Xu, S.; Deng, B.; Meng, Y.; Liu, G.; Han, J. ReA-Net: A Multiscale Region Attention Network With Neighborhood Consistency Supervision for Building Extraction From Remote Sensing Image. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 9033–9047. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhou, H.; Ding, X.; Zhang, R. Extreme Learning Machine for Regression and Multiclass Classification. IEEE Trans. Syst. Man Cybern. Part B-Cybern. 2012, 42, 513–529. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme Learning Machine: Theory and Applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Cao, J.; Lin, Z. Extreme Learning Machines on High Dimensional and Large Data Applications: A Survey. Math. Probl. Eng. 2015, 2015, 103796. [Google Scholar] [CrossRef]
- Xiao, D.; Huang, J.; Li, J.; Fu, Y.; Li, Z. Inversion Study of Cadmium Content in Soil Based on Reflection Spectroscopy and MSC-ELM Model. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 2022, 283, 121696. [Google Scholar] [CrossRef] [PubMed]
- Li, R.; Huang, W.; Shang, G.; Zhang, X.; Wang, X.; Liu, J.; Wang, Y.; Qiao, J.; Fan, X.; Wu, K.; et al. Rapid Recognizing the Producing Area of a Tobacco Leaf Using Near-Infrared Technology and a Multi-Layer Extreme Learning Machine Algorithm. J. Braz. Chem. Soc. 2022, 33, 251–259. [Google Scholar] [CrossRef]
- Li, R.; Zhang, X.; Li, K.; Qiao, J.; Wang, Y.; Zhang, J.; Zi, W. Nondestructive and Rapid Grading of Tobacco Leaves by Use of a Hand-Held near-Infrared Spectrometer, Based on a Particle Swarm Optimization-Extreme Learning Machine Algorithm. Spectrosc. Lett. 2020, 53, 685–691. [Google Scholar] [CrossRef]
- Zheng, W.; Fu, X.; Ying, Y. Spectroscopy-Based Food Classification with Extreme Learning Machine. Chemom. Intell. Lab. Syst. 2014, 139, 42–47. [Google Scholar] [CrossRef]
- Yin, H.; Chen, C.; He, Y.; Jia, J.; Chen, Y.; Du, R.; Xiang, R.; Zhang, X.; Zhang, Z. Synergistic Estimation of Soil Salinity Based on Sentinel-1 Image Texture and Sentinel-2 Salinity Spectral Indices. J. Appl. Remote Sens. 2023, 17, 018502. [Google Scholar] [CrossRef]
- Yan, D.; Chu, Y.; Li, L.; Liu, D. Hyperspectral Remote Sensing Image Classification with Information Discriminative Extreme Learning Machine. Multimed. Tools Appl. 2018, 77, 5803–5818. [Google Scholar] [CrossRef]
- Liang, X.J.; Qin, P.; Xiao, Y.F.; Kim, K.Y.; Liu, R.J.; Chen, X.Y.; Wang, Q.B. Automatic Remote Sensing Detection of Floating Macroalgae in the Yellow and East China Seas Using Extreme Learning Machine. J. Coast. Res. 2019, 90, 272–281. [Google Scholar] [CrossRef]
- Fu, Y.; Xie, H.; Mao, Y.; Ren, T.; Xiao, D. Copper Content Inversion of Copper Ore Based on Reflectance Spectra and the VTELM Algorithm. Sensors 2020, 20, 6780. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A Novel Swarm Intelligence Optimization Approach: Sparrow Search Algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. In Proceedings of the 32nd International Conference on Machine Learning (PMLR), Lille, France, 7–9 July 2015; Volume 37, pp. 448–456. [Google Scholar]
- Zhou, F.; Zhu, H.; Li, C. A Pretreatment Method Based on Wavelet Transform for Quantitative Analysis of UV–Vis Spectroscopy. Optik 2019, 182, 786–792. [Google Scholar] [CrossRef]
- Zhang, C.; Chen, P.; Jiang, F.; Xie, J.; Yu, T. Fault Diagnosis of Nuclear Power Plant Based on Sparrow Search Algorithm Optimized CNN-LSTM Neural Network. Energies 2023, 16, 2934. [Google Scholar] [CrossRef]
- Salim, A.; Khedr, A.M.; Osamy, W. IoVSSA: Efficient Mobility-Aware Clustering Algorithm in Internet of Vehicles Using Sparrow Search Algorithm. IEEE Sens. J. 2023, 23, 4239–4255. [Google Scholar] [CrossRef]
- Ouyang, M.; Wang, Y.; Wu, F.; Lin, Y. Continuous Reactor Temperature Control with Optimized PID Parameters Based on Improved Sparrow Algorithm. Processes 2023, 11, 1302. [Google Scholar] [CrossRef]
- Gasmi, A.; Gomez, C.; Chehbouni, A.; Dhiba, D.; El Gharous, M. Using PRISMA Hyperspectral Satellite Imagery and GIS Approaches for Soil Fertility Mapping (FertiMap) in Northern Morocco. Remote Sens. 2022, 14, 4080. [Google Scholar] [CrossRef]
- Breiman, L. Bagging Predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | RMSE | R2 | MAE | RPIQ |
|---|---|---|---|---|
| BP | 4.325 | 0.745 | 3.180 | 1.245 |
| RBF | 3.731 | 0.786 | 2.716 | 1.264 |
| ELM | 3.392 | 0.802 | 2.627 | 1.306 |
| VTELM | 3.175 | 0.828 | 2.312 | 1.392 |
| MSSA-BNVTELM | 2.164 | 0.943 | 1.702 | 1.521 |
| Algorithm | RMSE | R2 | MAE | RPIQ |
|---|---|---|---|---|
| BP | 3.052 | 0.744 | 2.622 | 0.989 |
| RBF | 3.229 | 0.685 | 2.775 | 0.905 |
| ELM | 2.685 | 0.889 | 2.374 | 1.101 |
| VTELM | 2.128 | 0.905 | 1.782 | 1.305 |
| MSSA-BNVTELM | 1.358 | 0.962 | 1.116 | 1.337 |
| Algorithm | RMSE | R2 | MAE | RPIQ |
|---|---|---|---|---|
| BP | 3.018 | 0.794 | 2.453 | 1.052 |
| RBF | 3.742 | 0.581 | 3.274 | 1.143 |
| ELM | 2.976 | 0.851 | 2.431 | 1.221 |
| VTELM | 2.201 | 0.881 | 1.834 | 1.155 |
| MSSA-BNVTELM | 1.647 | 0.923 | 1.245 | 1.317 |
| Input Data | RMSE | R2 | MAE | RPIQ |
|---|---|---|---|---|
| Visible–infrared | 2.089 | 0.941 | 1.588 | 1.623 |
| Sentinel-2 | 1.180 | 0.958 | 1.008 | 1.452 |
| Landsat-8 | 1.752 | 0.938 | 1.227 | 1.511 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, M.; Mao, Y.; Zhang, M.; Xiao, D.; Xie, H. Rapid Detection of Iron Ore and Mining Areas Based on MSSA-BNVTELM, Visible—Infrared Spectroscopy, and Remote Sensing. Remote Sens. 2023, 15, 4100. https://doi.org/10.3390/rs15164100
Xu M, Mao Y, Zhang M, Xiao D, Xie H. Rapid Detection of Iron Ore and Mining Areas Based on MSSA-BNVTELM, Visible—Infrared Spectroscopy, and Remote Sensing. Remote Sensing. 2023; 15(16):4100. https://doi.org/10.3390/rs15164100
Chicago/Turabian StyleXu, Mengyuan, Yachun Mao, Mengqi Zhang, Dong Xiao, and Hongfei Xie. 2023. "Rapid Detection of Iron Ore and Mining Areas Based on MSSA-BNVTELM, Visible—Infrared Spectroscopy, and Remote Sensing" Remote Sensing 15, no. 16: 4100. https://doi.org/10.3390/rs15164100
APA StyleXu, M., Mao, Y., Zhang, M., Xiao, D., & Xie, H. (2023). Rapid Detection of Iron Ore and Mining Areas Based on MSSA-BNVTELM, Visible—Infrared Spectroscopy, and Remote Sensing. Remote Sensing, 15(16), 4100. https://doi.org/10.3390/rs15164100