

Slip Estimation Using Variation Data of Strain of the Chassis of Lunar Rovers Traveling on Loose Soil
Abstract
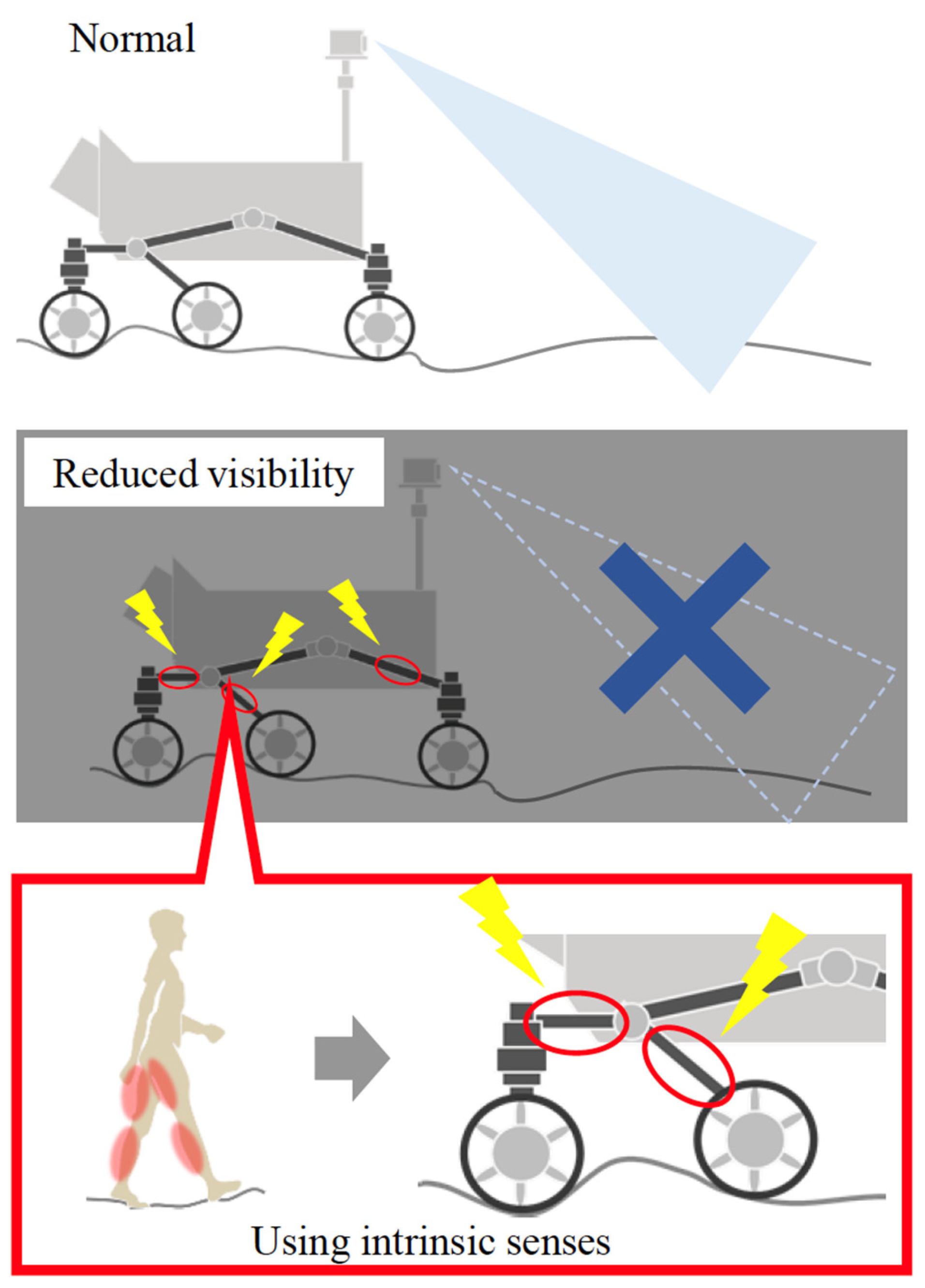
:1. Introduction
2. Traveling on Loose Soil and the Small Deformation of the Chassis
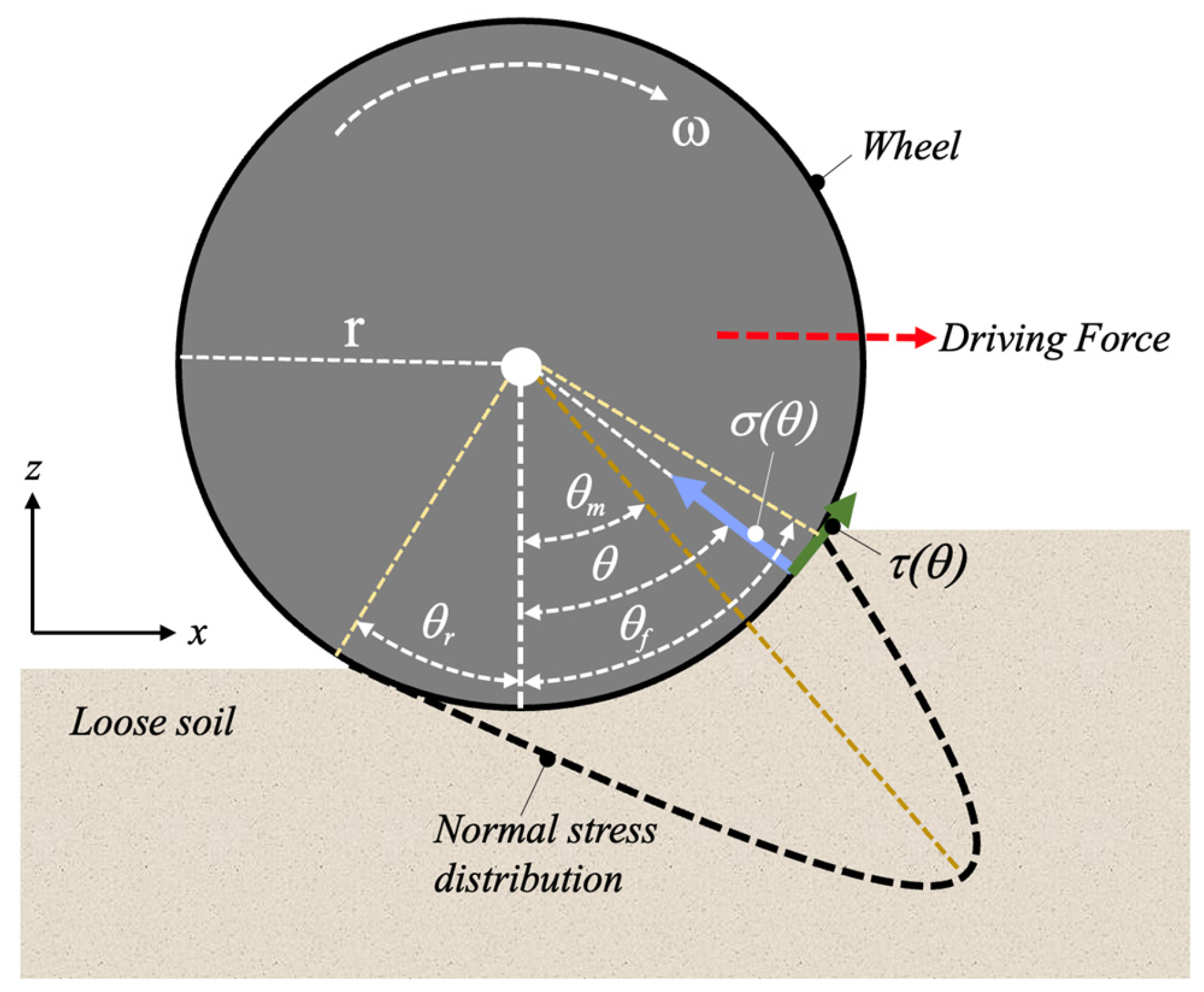
2.1. About the Wheel of the Rover Traveling on Loose Soil
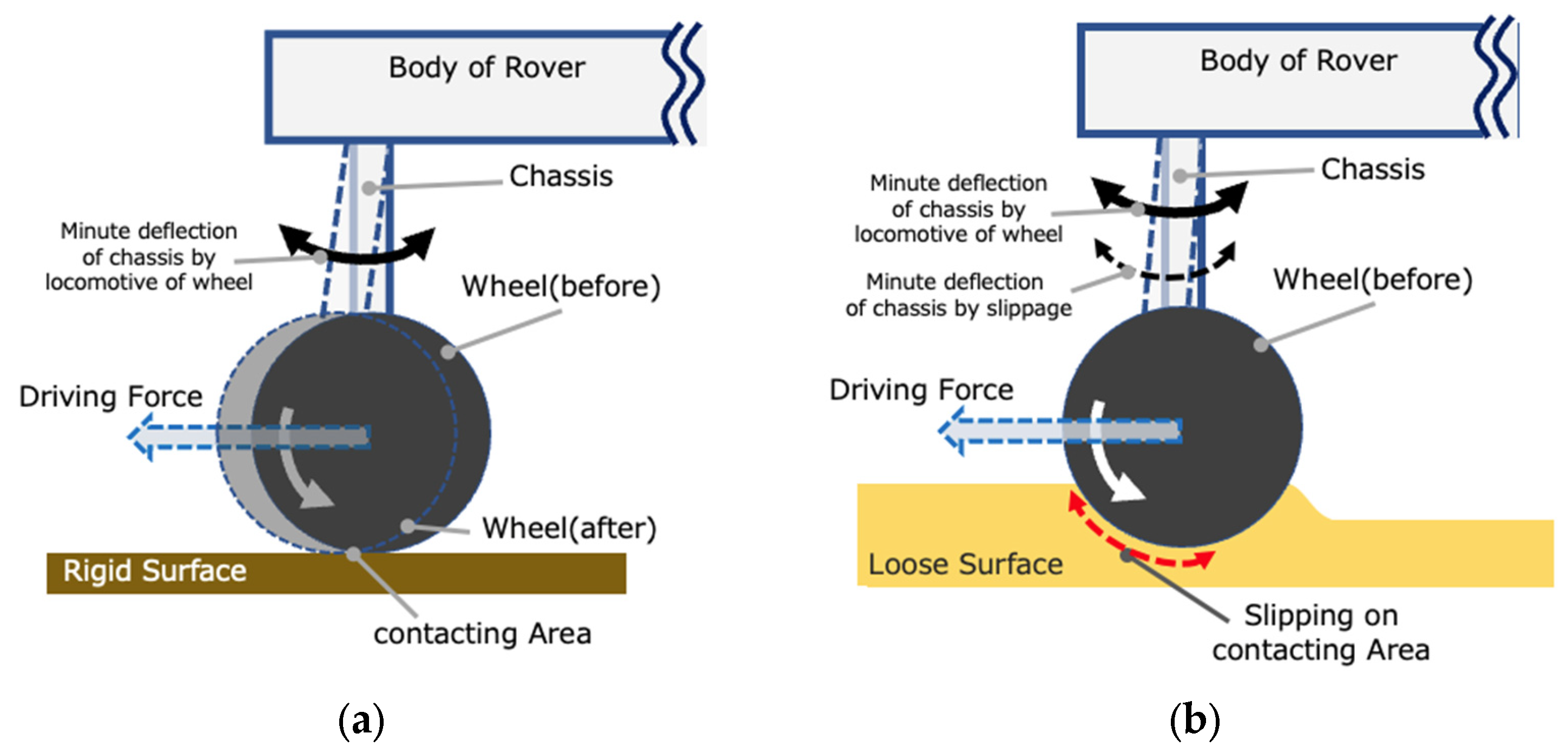
2.2. The Small Deformation That Occurs in the Chassis of the Wheel
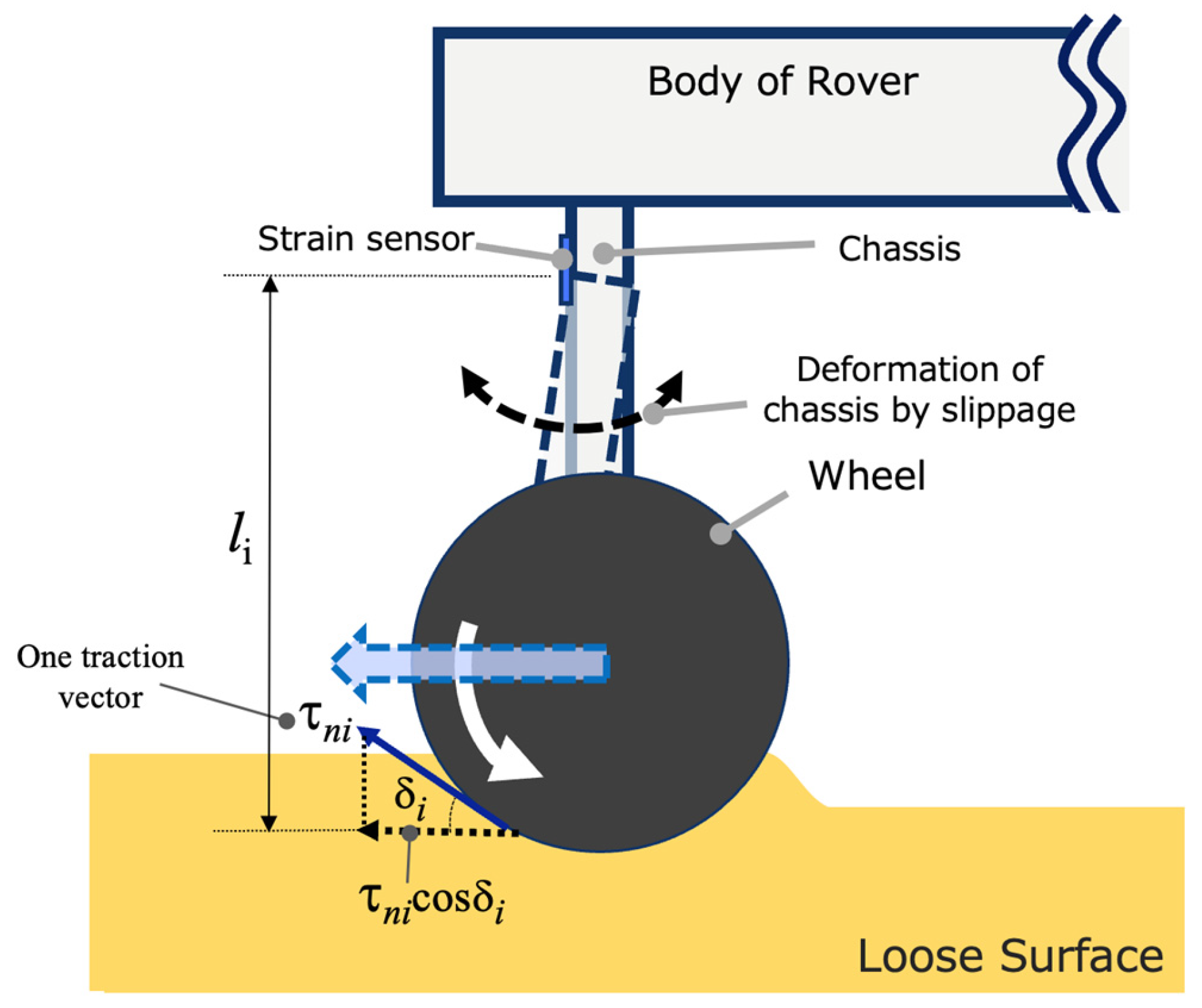
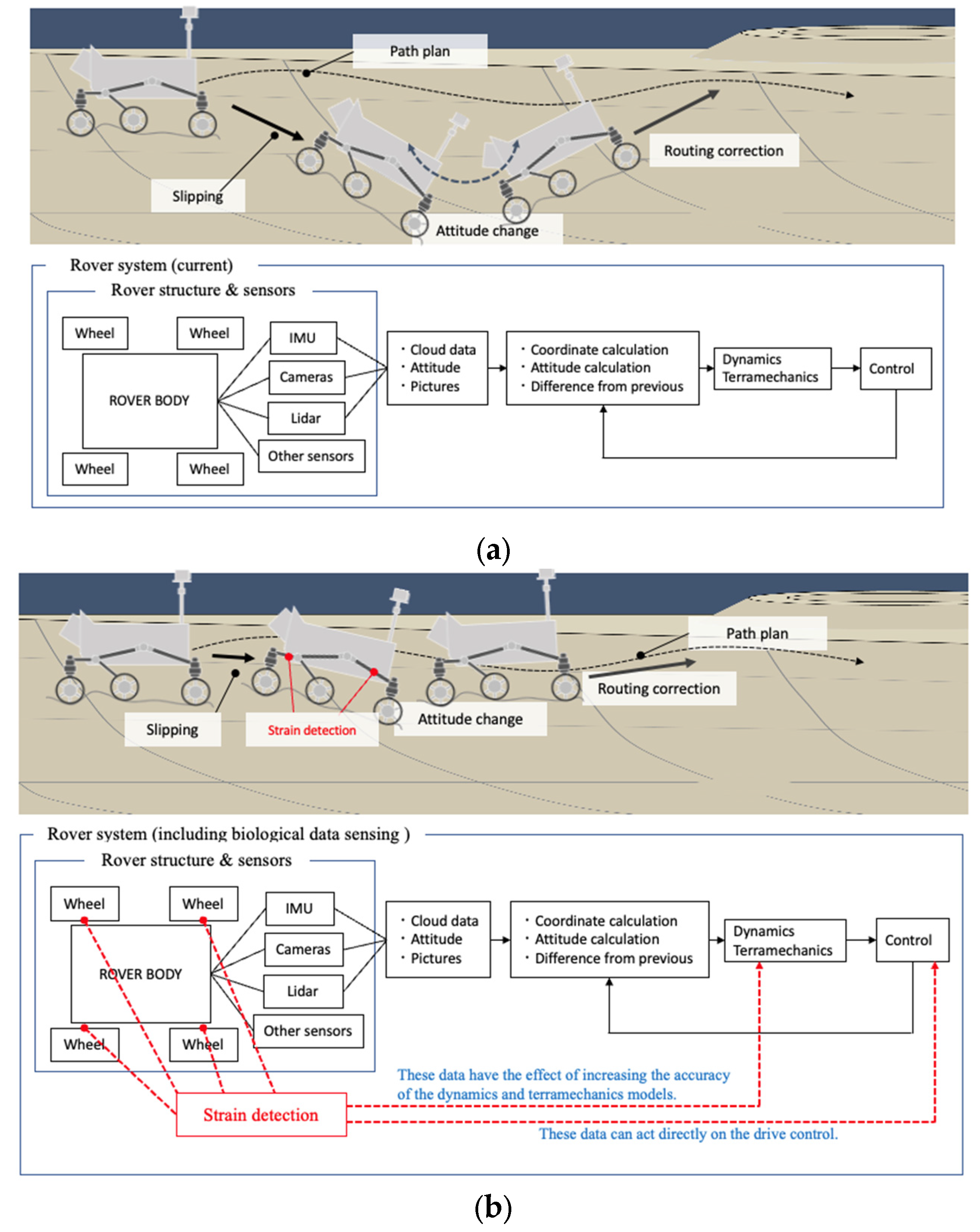
2.3. Consideration for System including “Small Deformation”
3. Measurement
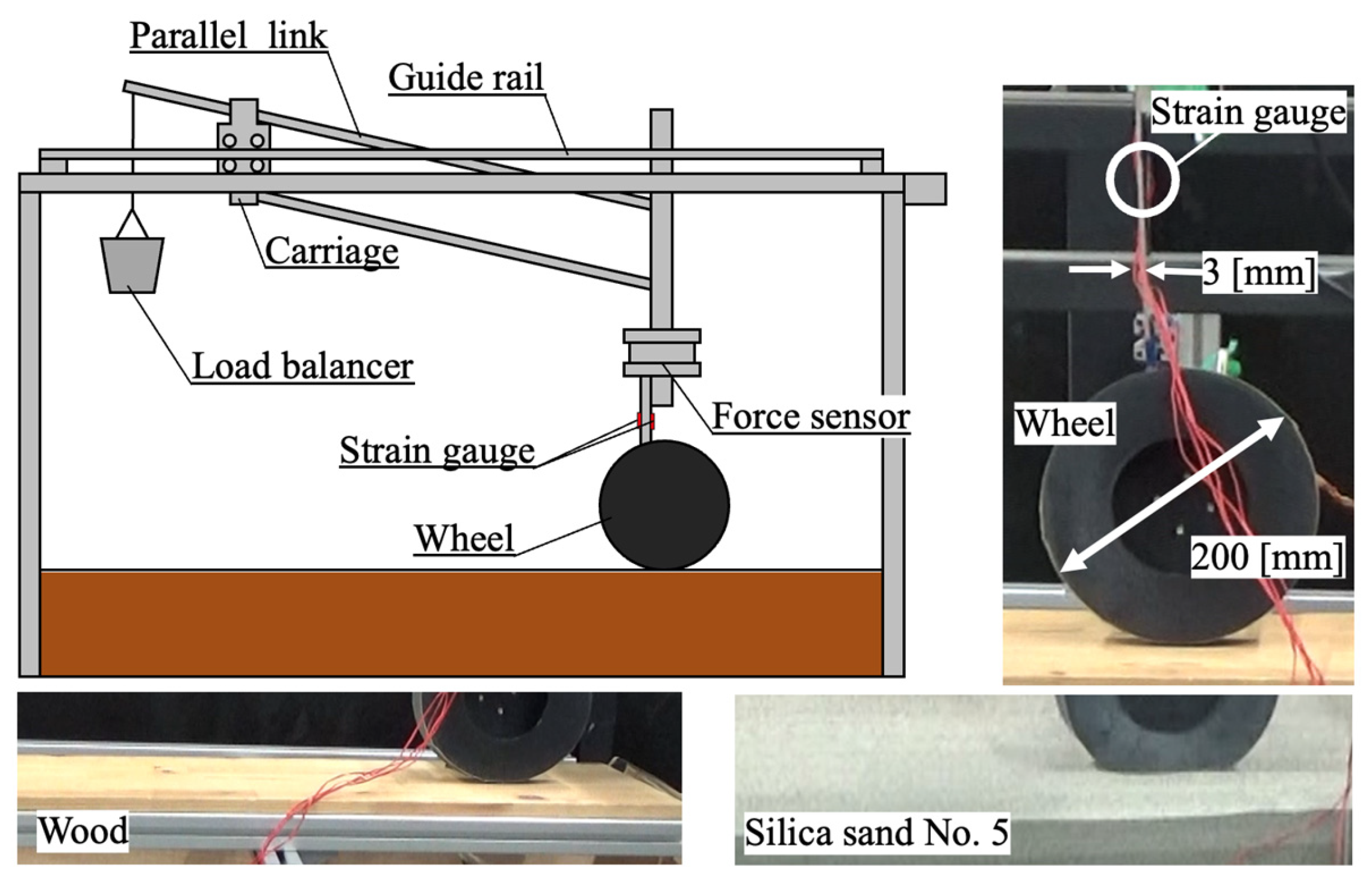
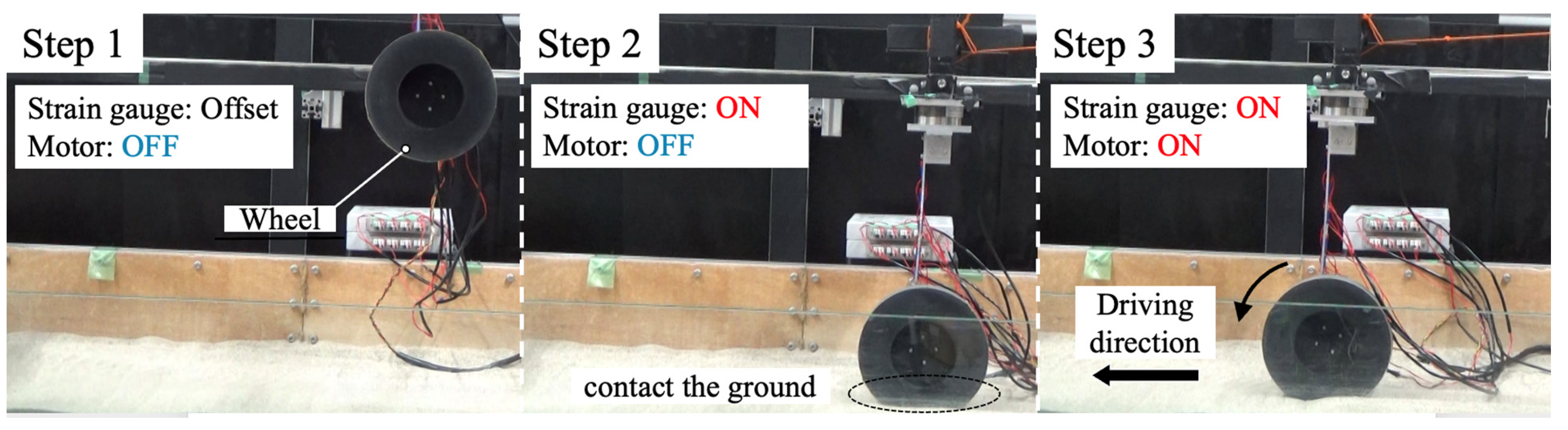
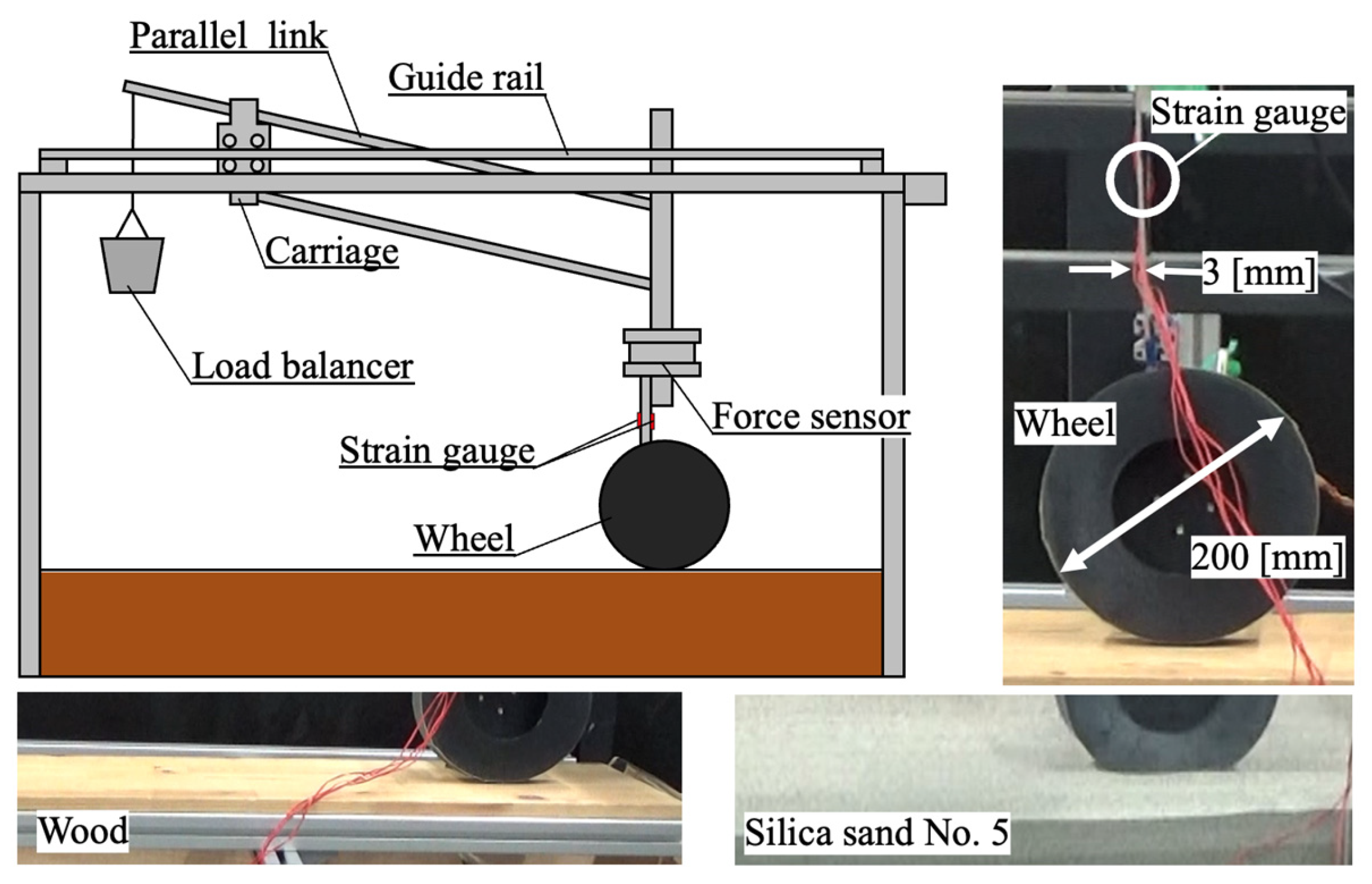
3.1. Experimental Environment and Conditions
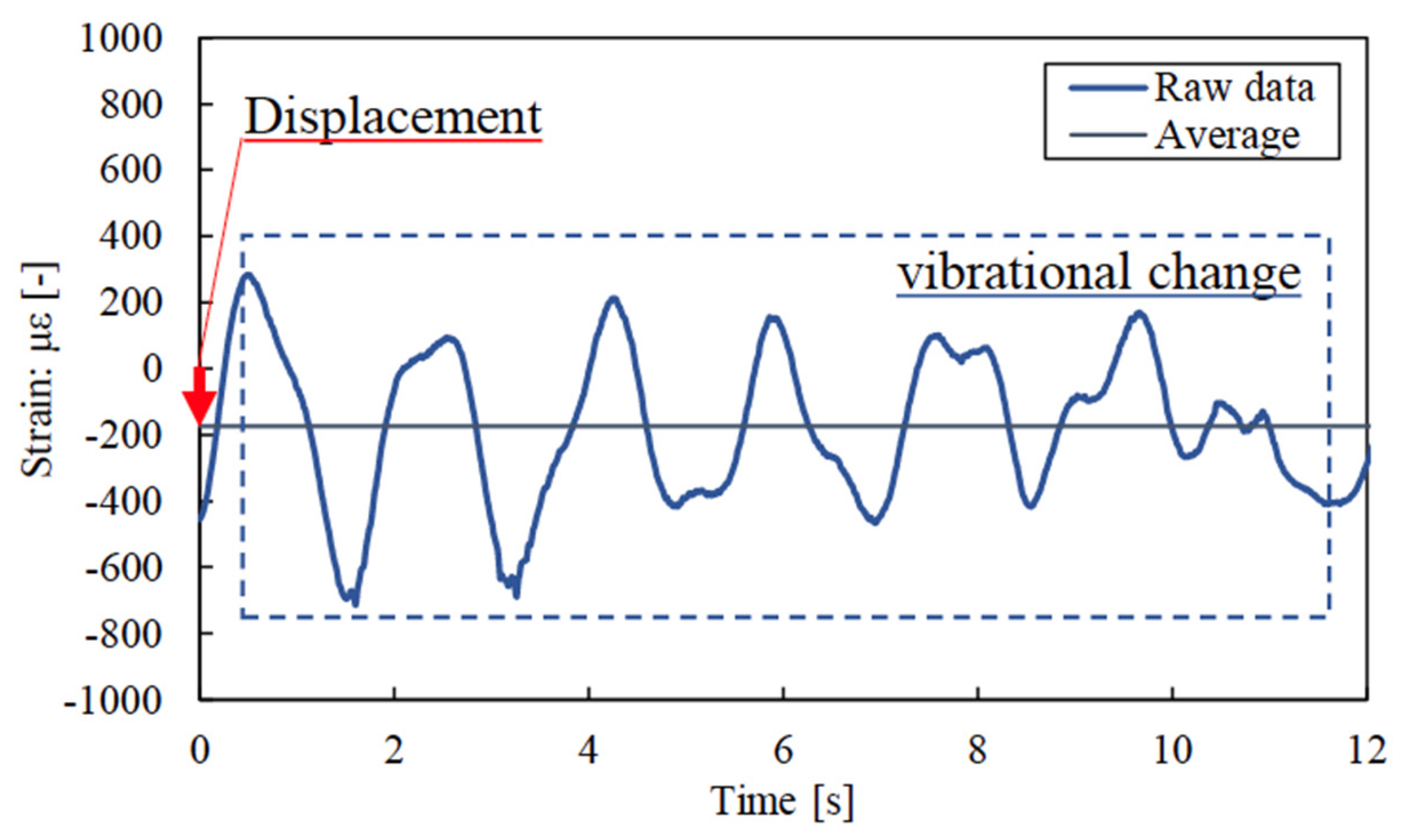
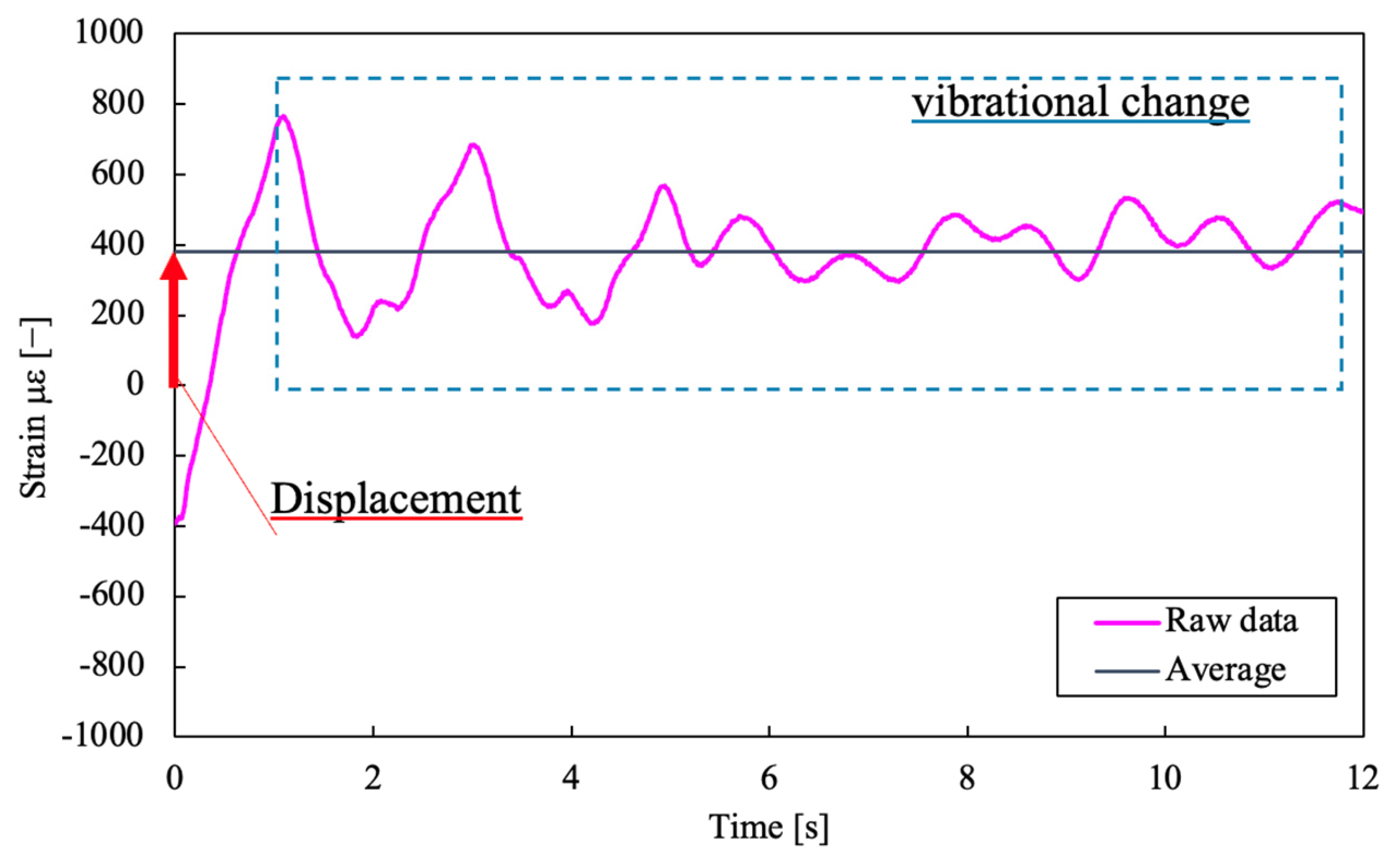
3.2. Results
3.3. Discussion
4. Verification
4.1. Experimental Environment and Conditions
4.2. Experimental Results: Nuclear Chain Fiber Method
4.3. Experimental Results: Nuclear Bag Fiber Method
4.4. Slip Ratio Estimation Using Biological Processing (Nuclear Chain Fiber Method and Nuclear Bag Fiber Method)
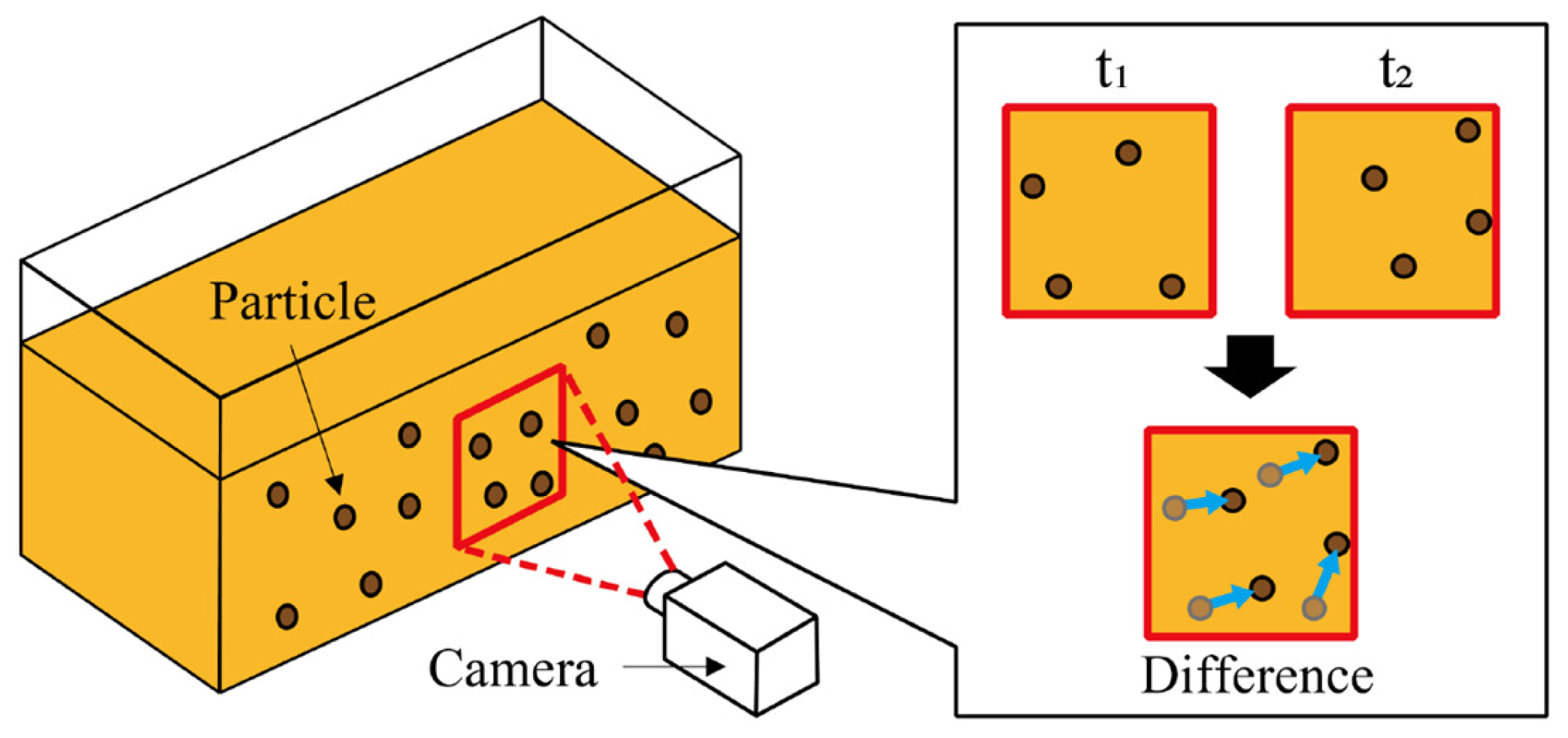
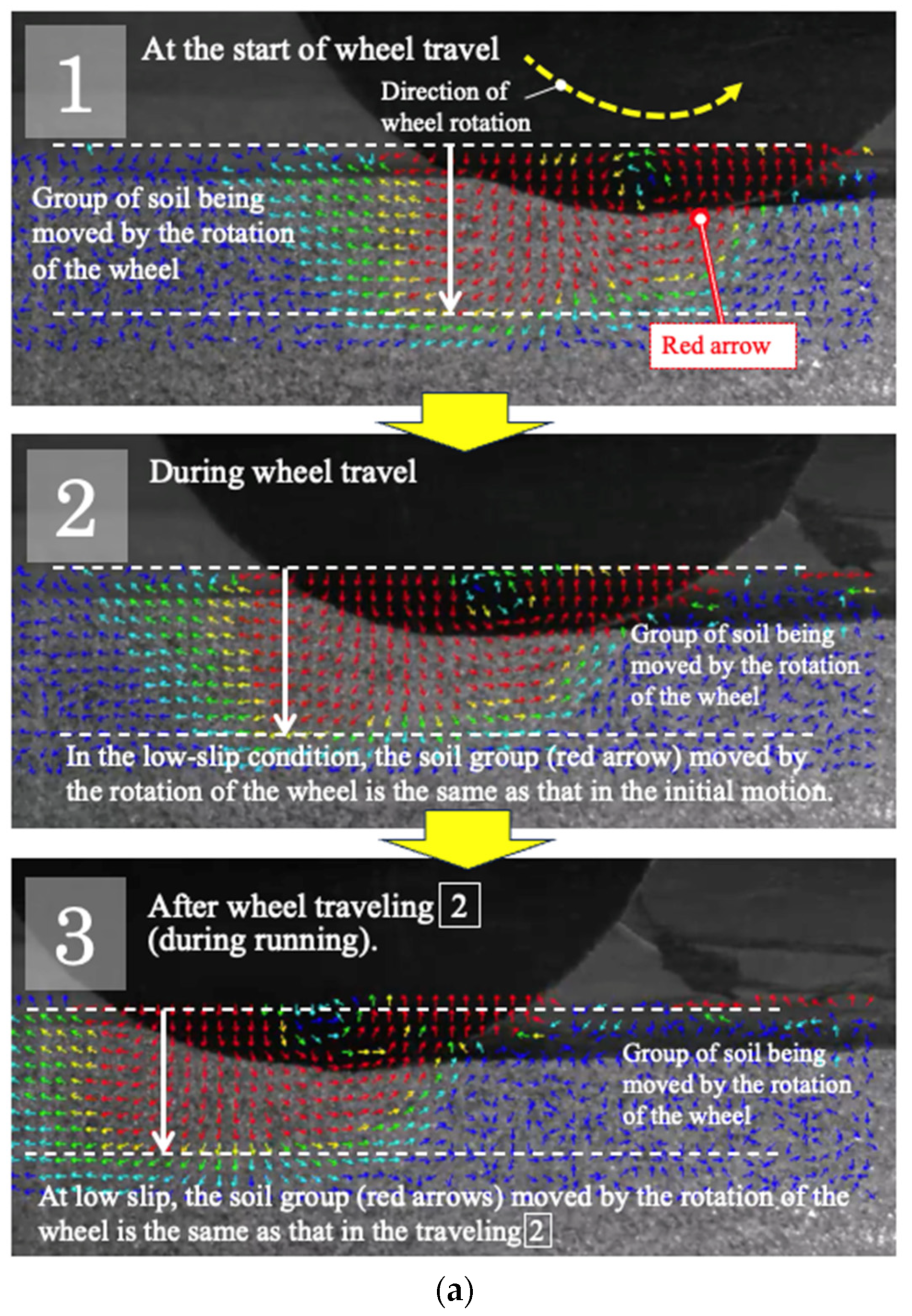
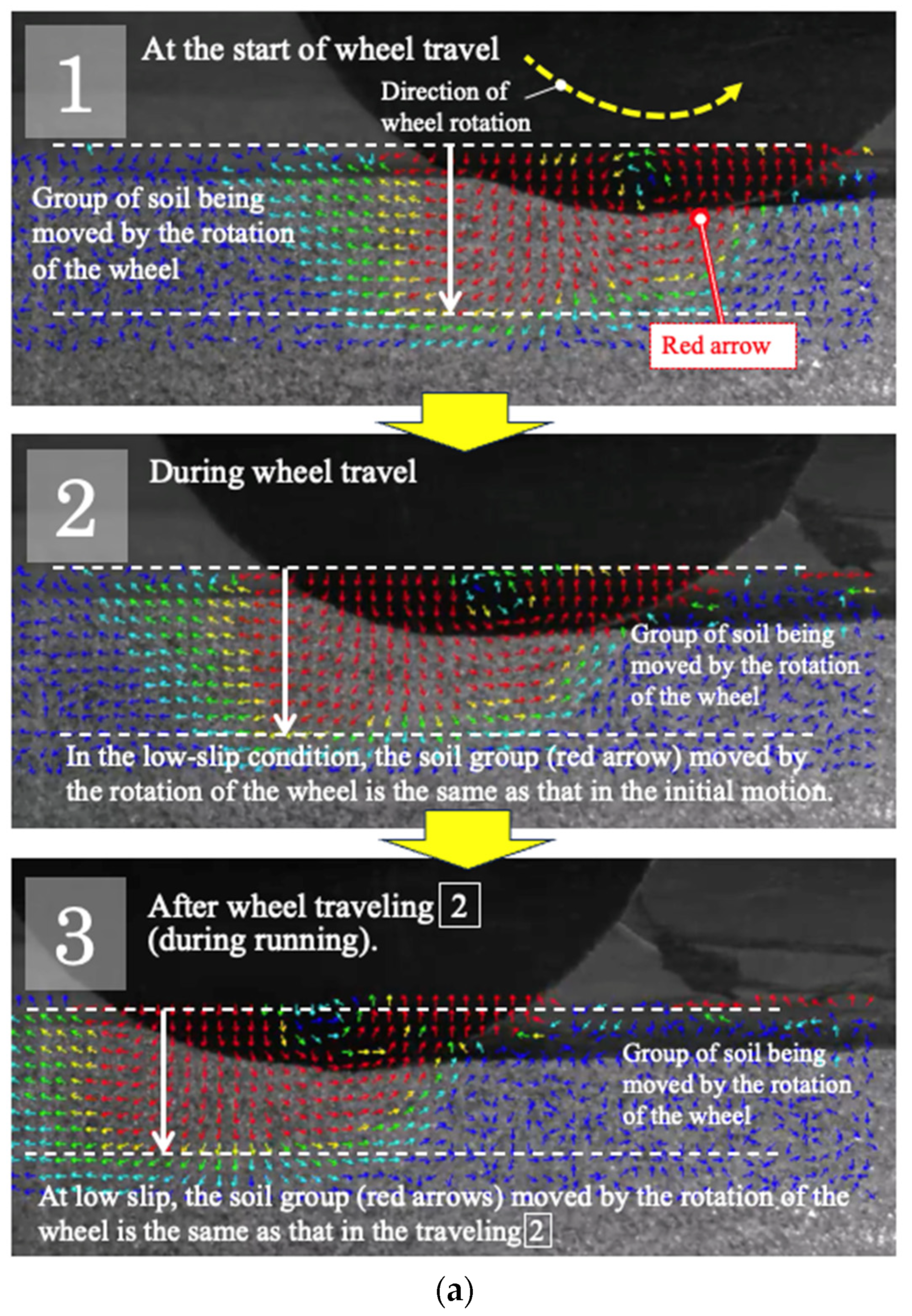
4.5. Visualization of Motion of Soil Grain in the Low Slip State and High Slip State
5. Conclusions
- (1)
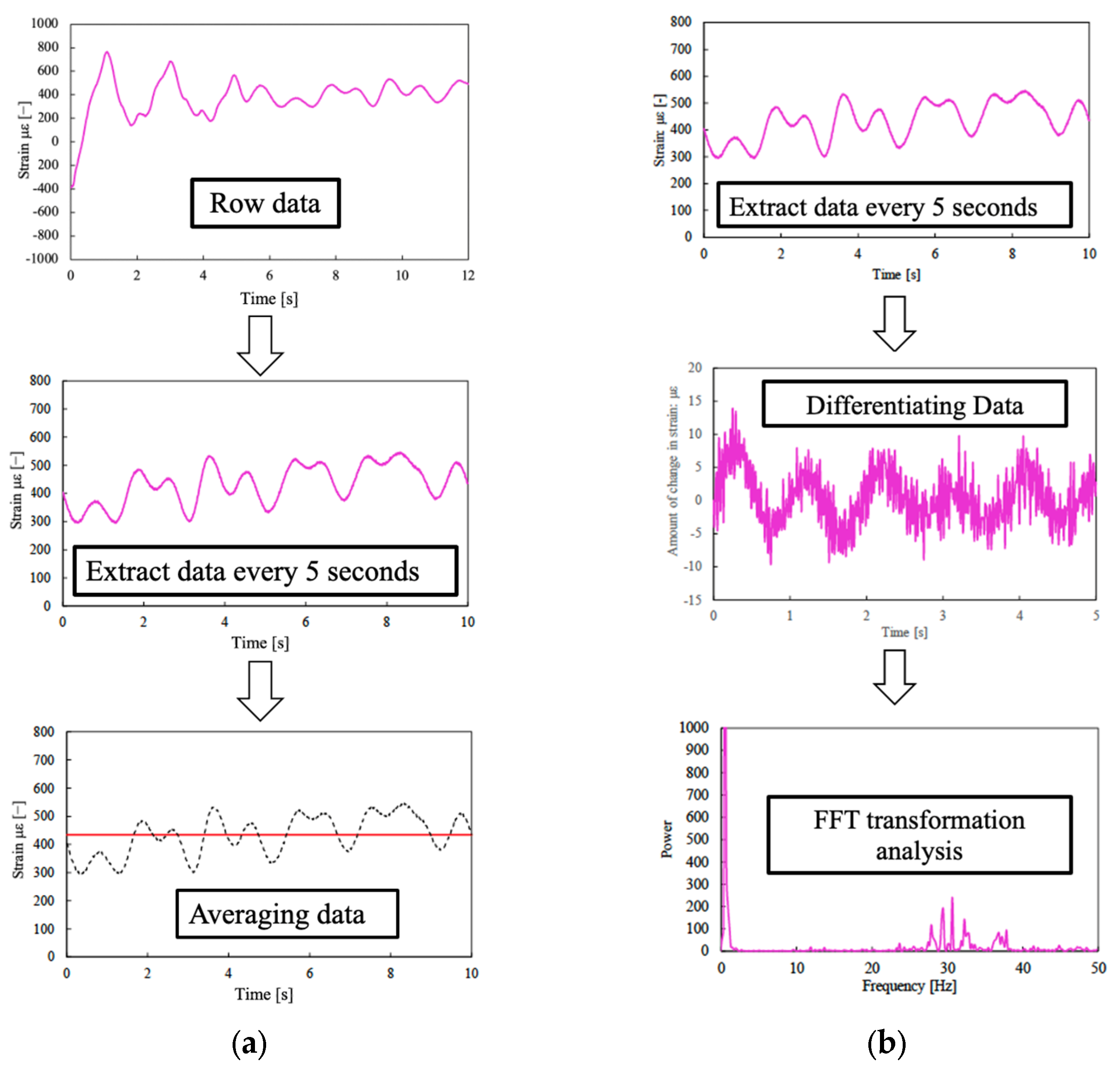
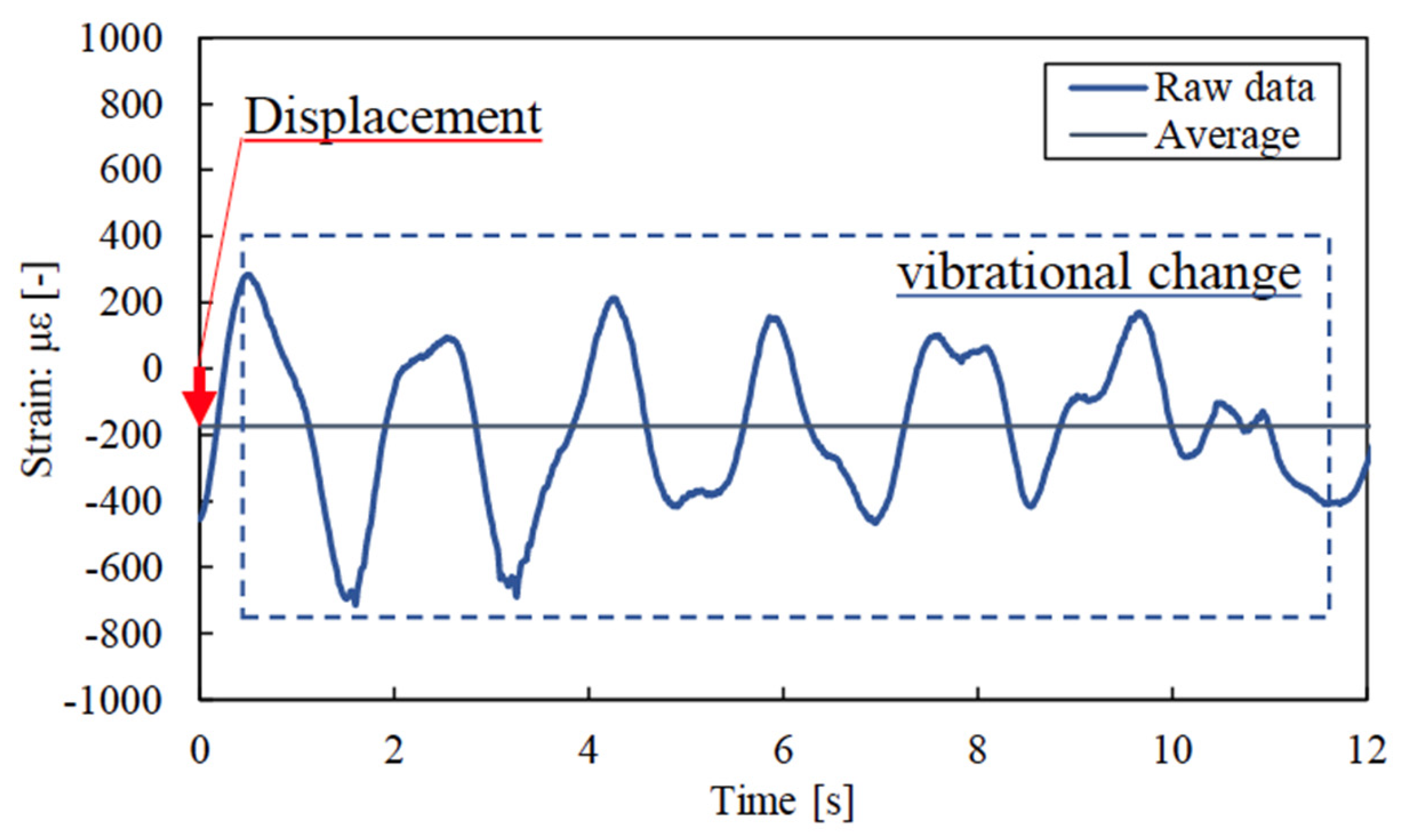
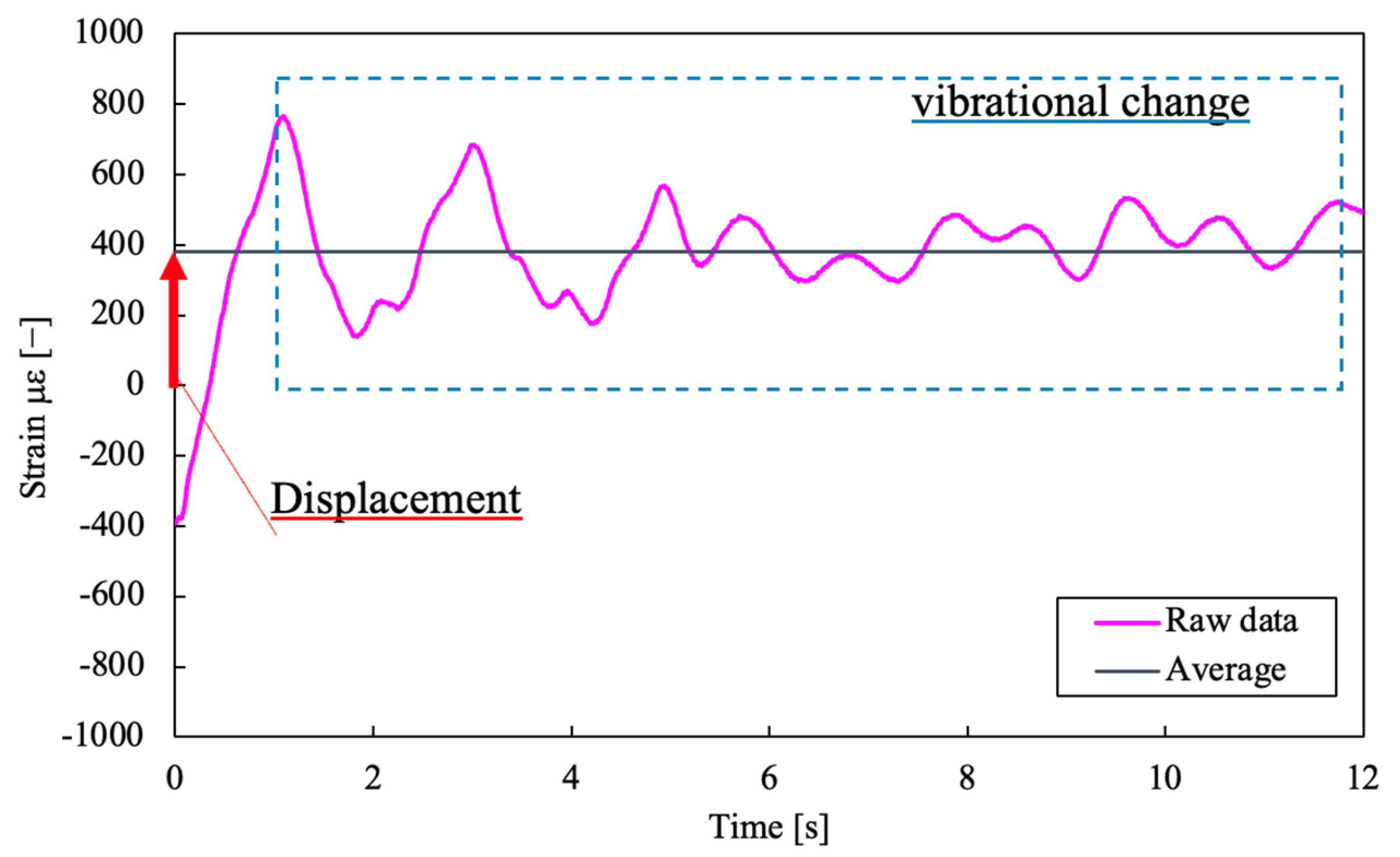
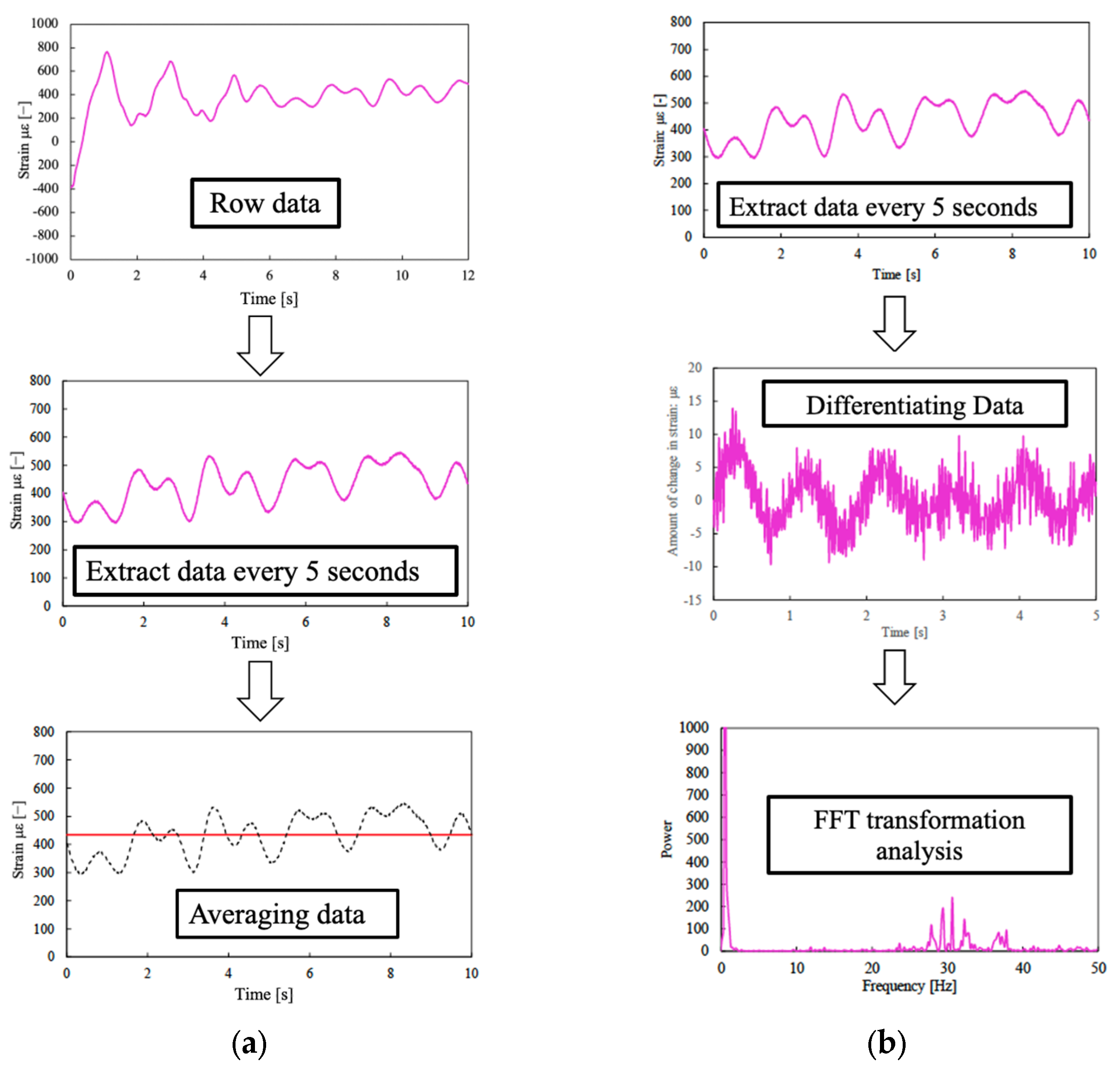
- The strains during traversing are classified into two major categories: the first is the displacement of the strain amount, and the second is the vibrational change in the strain. Based on the muscle spindle function, which is an intrinsic receptive sense, strain displacement was analyzed as a nuclear chain fiber analysis, and strain velocity was evaluated as a nuclear bag fiber analysis.
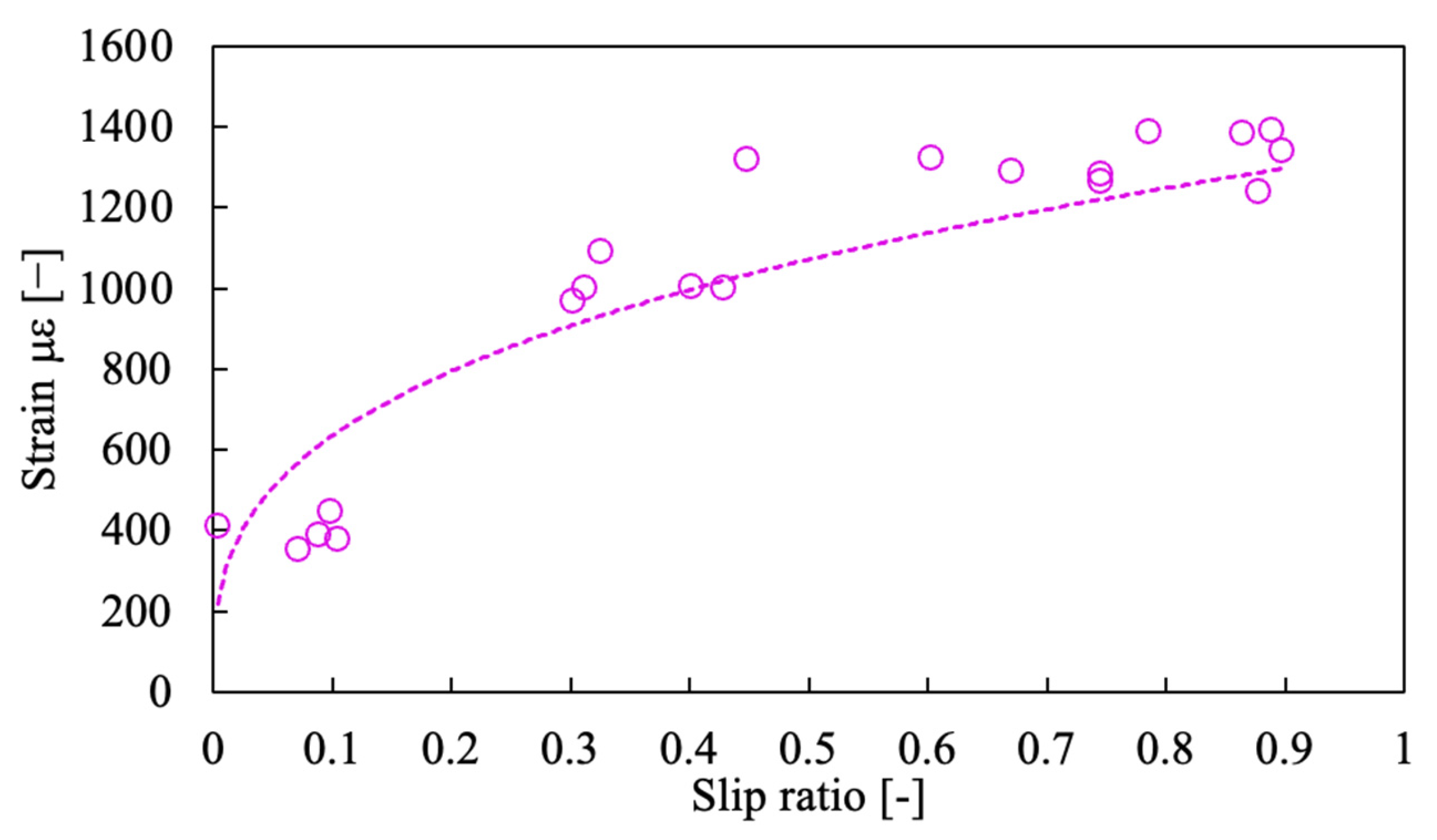
- (2)
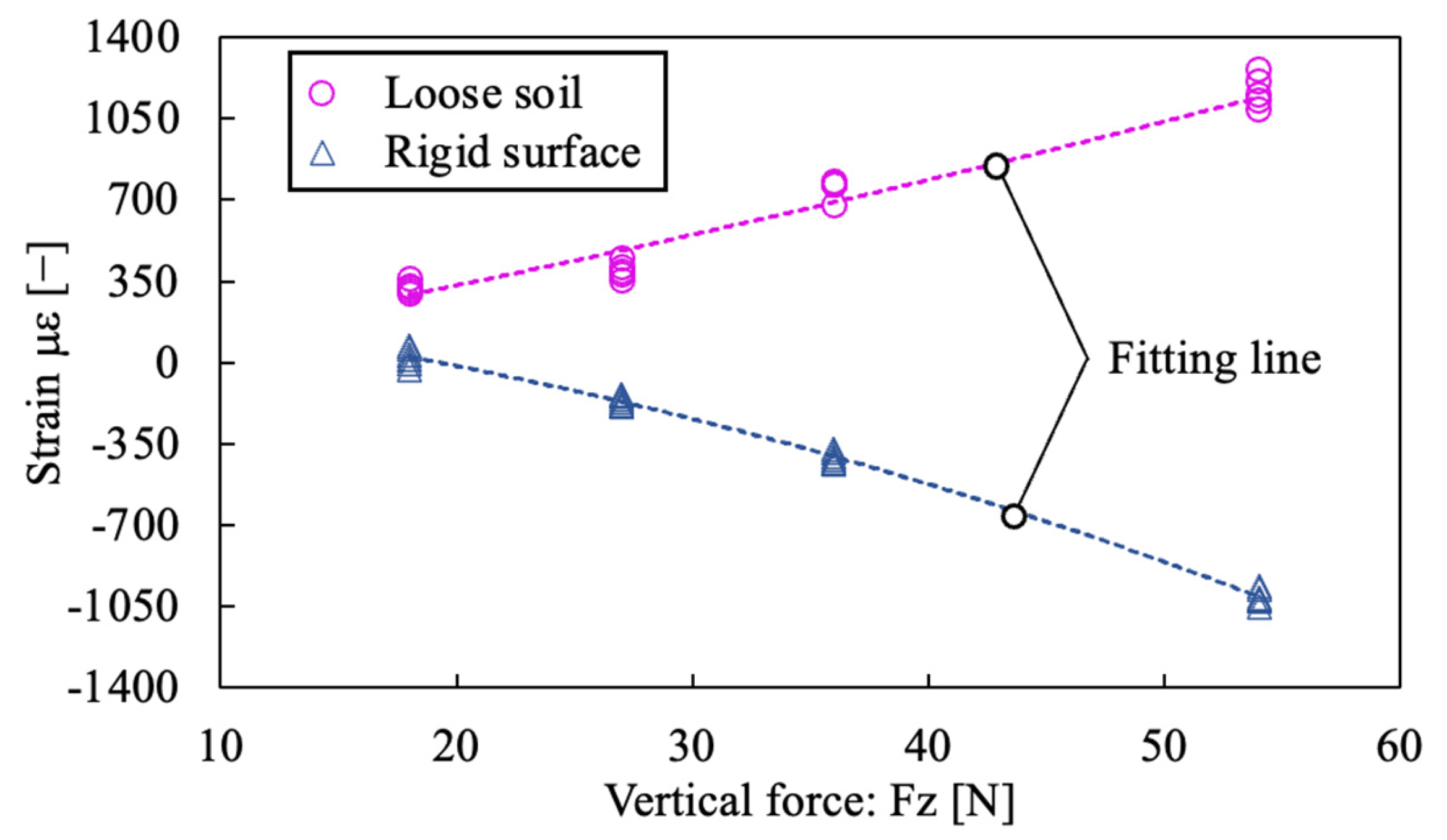
- The results of nuclear chain fiber analysis are described. A linear relationship was found between the strain amount and the increase in the vertical and driving direction forces, and the increase or decrease in each force could be detected from the strain amount. Therefore, it is possible to recognize the traveling state (slip condition) by using the nuclear chain fiber analysis to detect the change in the force applied to the wheel during traveling.
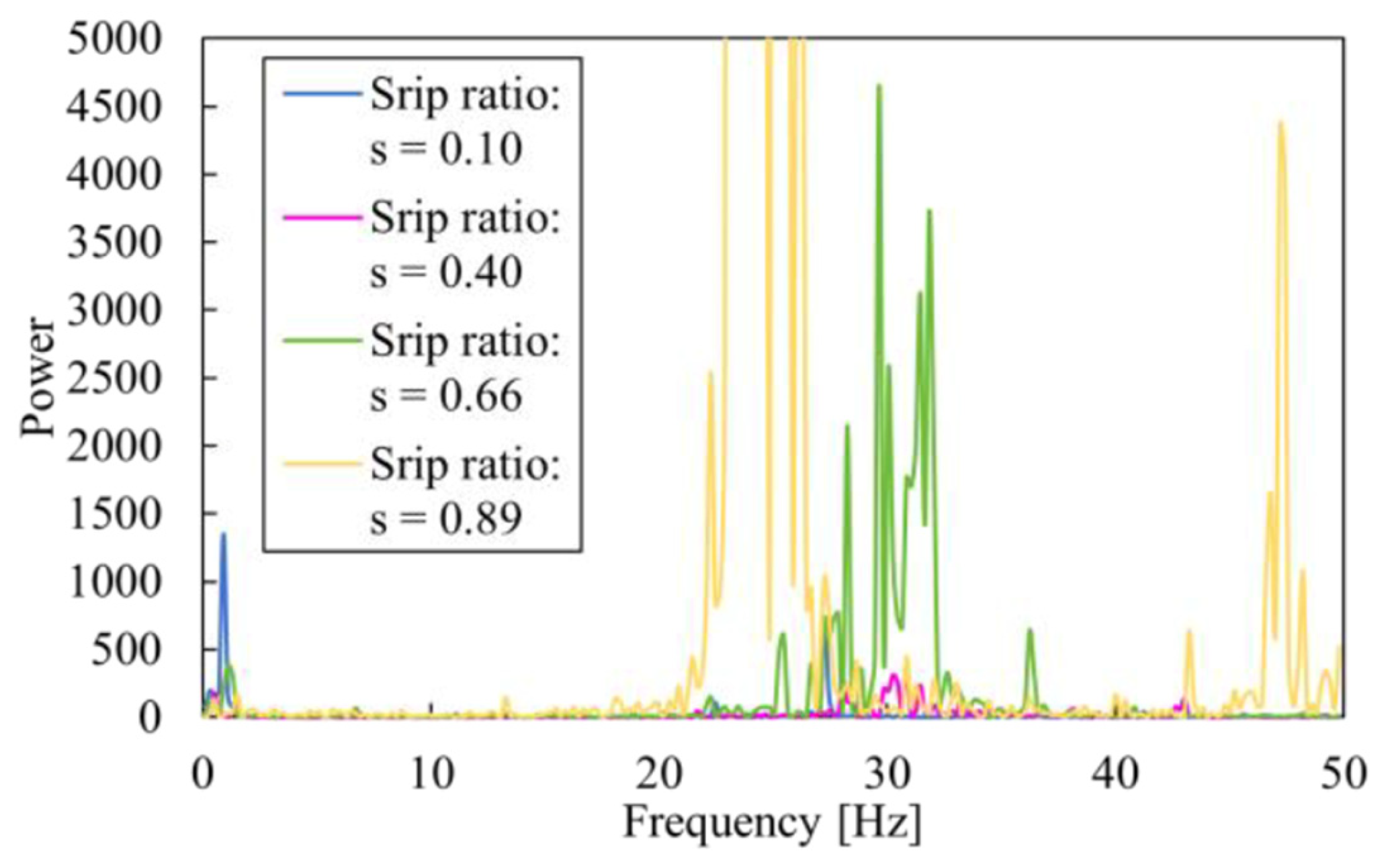
- (3)
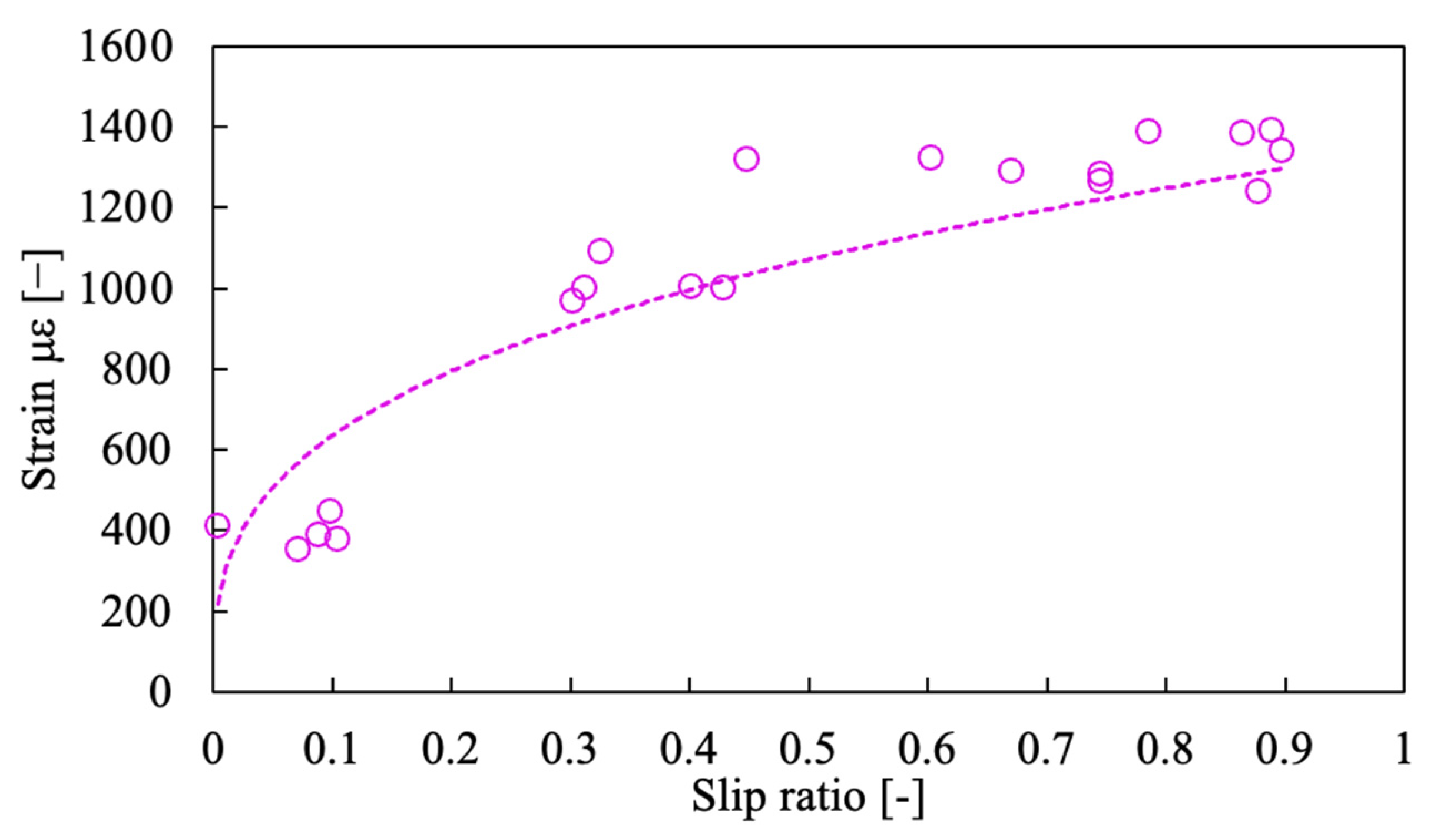
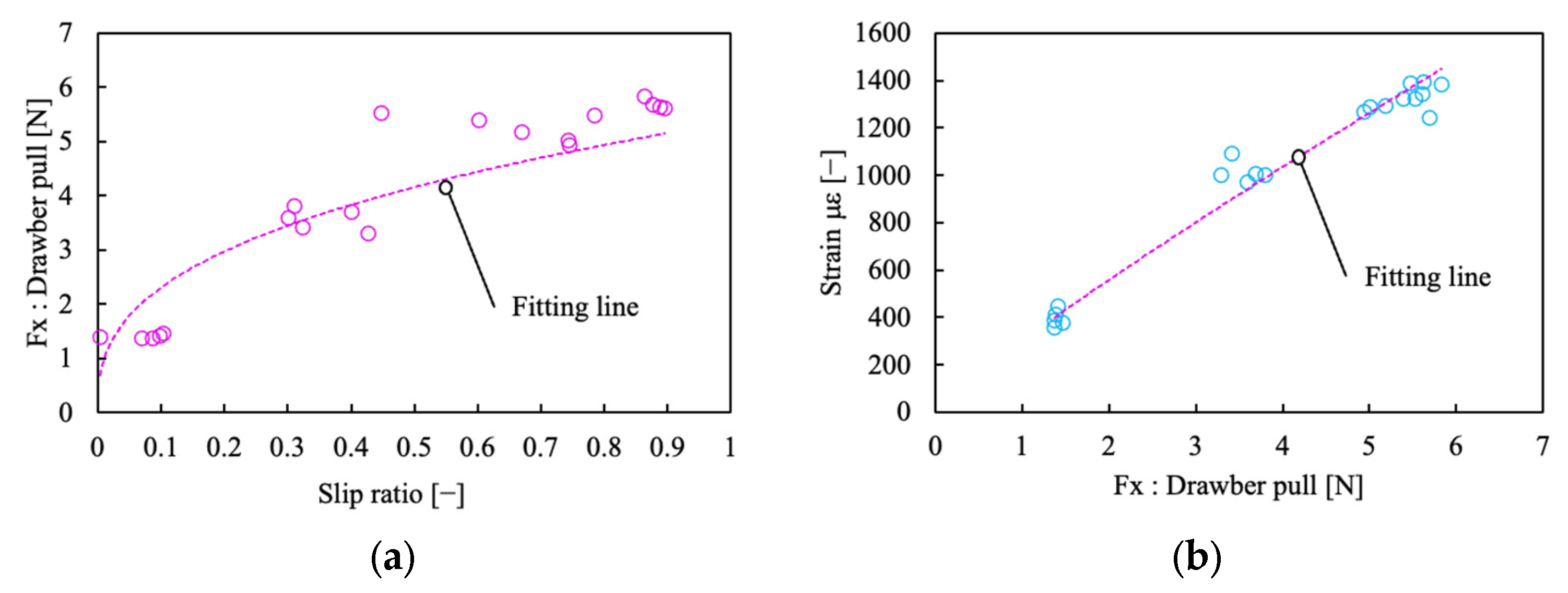
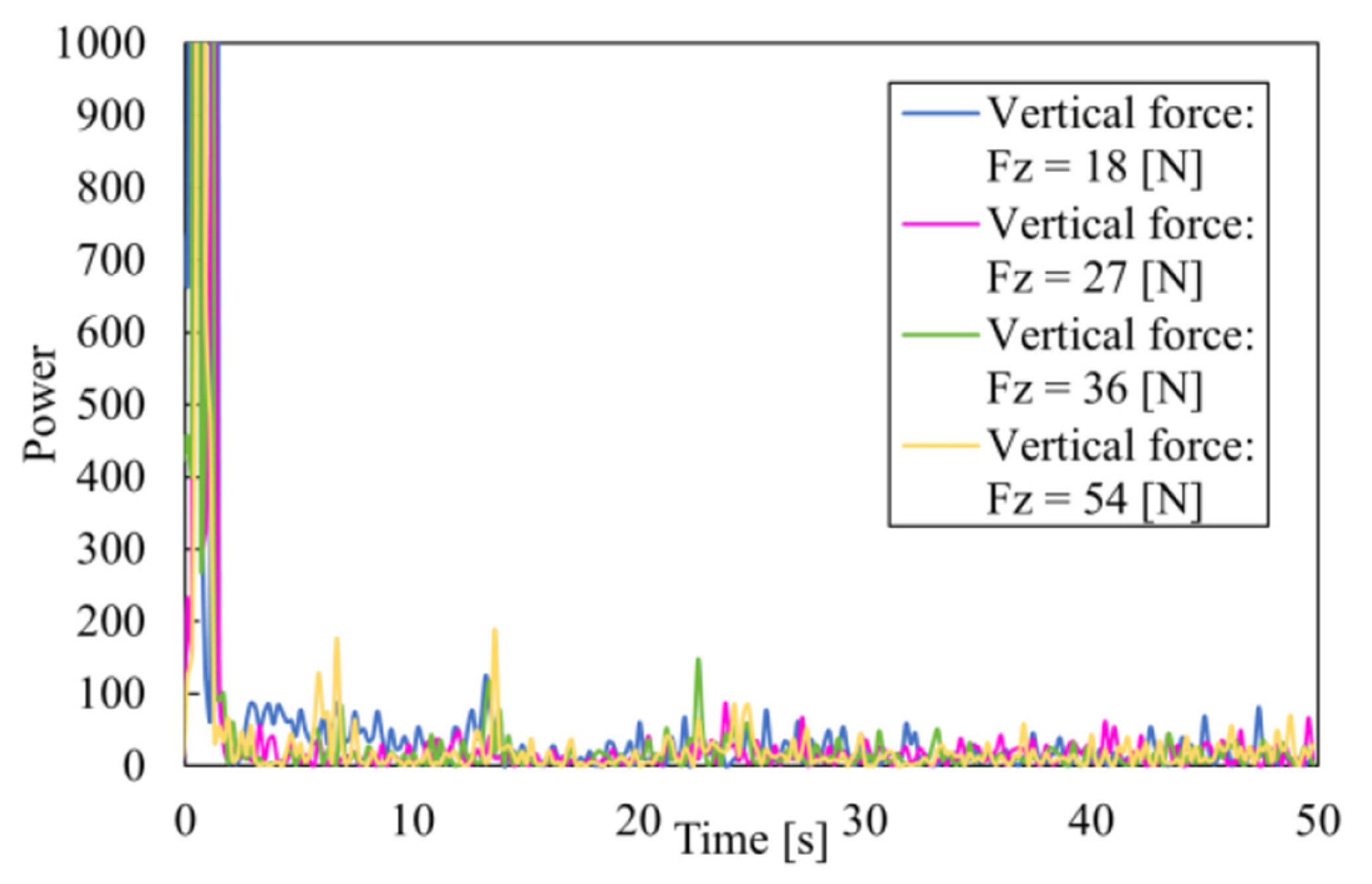
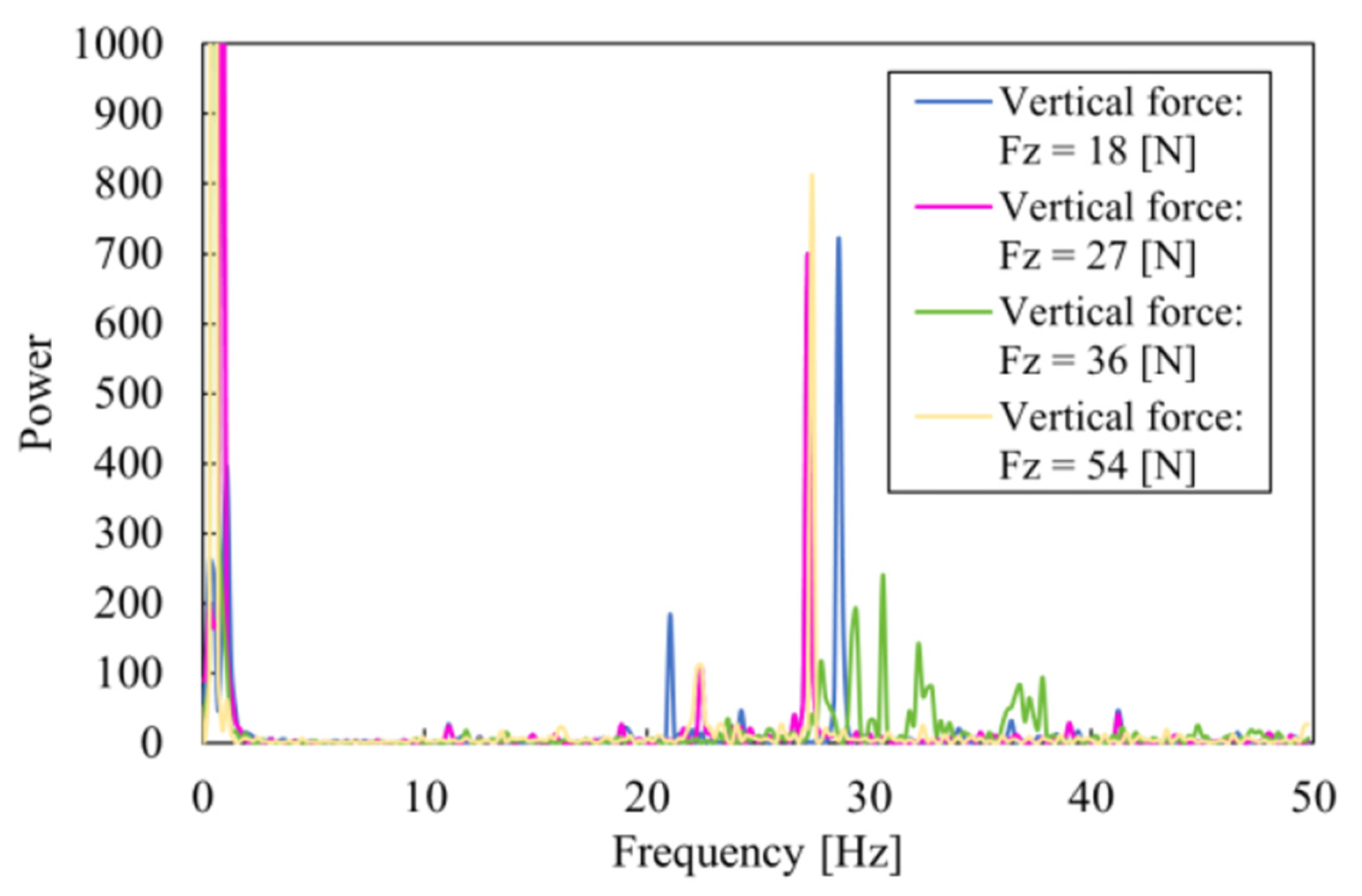
- The results of nuclear bag fiber analysis are described. The phenomenon that changes with the change in slip rate could be detected from the strain rate. Therefore, it is possible to recognize the traveling state (slip condition) by using the nuclear bag-fiber evaluation to detect the slip state. In this way, it was proved that the strain, which is a change in the shape of the chassis, can detect changes in the traveling state (slip condition).
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Otuki, M.; Wakabayashi, S.; Isigami, G.; Sutoh, M. Current status of, and challenges in relation to, the development of planetary exploration rovers at JAXA. J. Robot. Soc. Jpn. 2014, 32, 408–411. [Google Scholar] [CrossRef]
- Heinicke, C.; Adeli, S.; Baqué, M.; Correale, G.; Fateri, M.; Jaret, S.; Kopacz, N.; Ormö, J.; Poulet, L.; Verseux, C. Equipping an extraterrestrial laboratory: Overview of open research questions and recommended instrumentation for the Moon. Adv. Space Res. 2021, 68, 2565–2599. [Google Scholar] [CrossRef]
- Zuber, M.T.; Head, J.W.; Smith, D.E.; Neumann, G.A.; Mazarico, E.; Torrence, M.H.; Aharonson, O.; Tye, A.R.; Fassett, C.I.; Rosenburg, M.A.; et al. Constraints on the volatile distribution within Shackleton crater at the lunar south pole. Nature 2012, 486, 378–381. [Google Scholar] [CrossRef]
- Changela, H.G.; Chatzitheodoridis, E.; Antunes, A.; Beaty, D.; Bouw, K.; Bridges, J.C.; Capova, K.A.; Cockell, C.S.; Conley, C.A.; Dadachova, E.; et al. Mars: New insights and unresolved questions. Int. J. Astrobiol. 2021, 20, 394–426. [Google Scholar] [CrossRef]
- Kubota, T. Mobile Explorer Robot (Rover) for Lunar or Plenetary Exploration. J. Soc. Mech. Eng. 2001, 104, 71–74. [Google Scholar]
- Brusnikin, E.S.; Kreslavsky, M.A.; Zubarev, A.E.; Patratiy, V.D.; Krasilnikov, S.S.; Head, J.W.; Karachevtseva, I.P. Topographic measurements of slope streaks on Mars. Icarus 2016, 278, 52–61. [Google Scholar] [CrossRef]
- Kereszturi, A. Polar Ice on the Moon. In Encyclopedia of Lunar Science; Springer: Berlin/Heidelberg, Germany, 2023; pp. 971–980. [Google Scholar] [CrossRef]
- Morse, Z.R.; Osinski, G.R.; Tornabene, L.L.; Bourassa, M.; Zanetti, M.; Hill, P.J.; Pilles, E.; Cross, M.; King, D.; Tolometti, G. Detailed Morphologic Mapping and Traverse Planning for a Rover-based Lunar Sample Return Mission to Schrödinger Basin. Planet. Sci. J. 2021, 2, 167. [Google Scholar] [CrossRef]
- Hady, G.G.; Abigail, C.D.; Sebastian, H.; Andrea, A.; Damian, B. ALCIDES: A novel lunar mission concept study for the demonstration of enabling technologies in deep-space exploration and human-robots interaction. Acta Astronaut. 2018, 151, 270–283. [Google Scholar] [CrossRef]
- Marteau, E.; Wehage, K.; Higa, S.; Moreland, S.; Meirion-Griffith, G. Geotechnical assessment of terrain strength properties on Mars using the Perseverance rover’s abrading bit. J. Terramechanics 2023, 107, 13–22. [Google Scholar] [CrossRef]
- Da Poian, V.; Lyness, E.; Danell, R.; Li, X.; Theiling, B.; Trainer, M.; Kaplan, D.; Brinckerhoff, W. Science Autonomy and Space Science: Application to the ExoMars Mission. Front. Astron. Space Sci. 2022, 9, 848669. [Google Scholar] [CrossRef]
- Tang, Z.; Liu, J.; Wang, X.; Ren, X.; Chen, W.; Yan, W.; Zhang, X.; Tan, X.; Zeng, X.; Liu, D.; et al. Physical and mechanical characteristics of lunar soil at the Chang’E-4 landing site. Geophys. Res. Lett. 2020, 47, e2020GL089499. [Google Scholar] [CrossRef]
- Ding, L.; Zhou, R.; Yuan, Y.; Yang, H.; Li, J.; Yu, T.; Liu, C.; Wang, J.; Li, S.; Gao, H.; et al. A 2-year locomotive exploration and scientific investigation of the lunar farside by the Yutu-2 rover. Sci. Robot. 2022, 7, eabj6660. [Google Scholar] [CrossRef]
- Kubota, T. Rover Design for Lunar or Planetary Exploration. J. Robot. Soc. Jpn. 1999, 17, 609–614. [Google Scholar] [CrossRef]
- NASA/JPL. Spirit & Opportunity Highlights. 2004. Available online: http://mars.nasa.gov/mer/home/ (accessed on 20 August 2022).
- Helmick, D.M.; Cheng, Y.; Clouse, D.S.; Matthies, L.H.; Roumeliotis, S.I. Path following using visual odometry for a mars rover in high-slip Environments. IEEE Aerosp. Conf. Proc. 2004, 2, 772–789. [Google Scholar]
- Goldberg, S.B.; Maimone, M.W.; Matthies, L. Stereo vision and rover navigation software for planetary exploration. Proc. IEEE Aerosp. Conf. 2002, 5, 2025–2036. [Google Scholar]
- Xiong, Y.; Matthies, L. Error analysis of a real-time stereo system. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 1087–1093. [Google Scholar]
- Otsu, K.; Otsuki, M.; Isigami, G.; Kubota, T. Terrain adaptive detector selection for visual odometry in natural scenes. Adv. Robot. 2013, 27, 1465–1476. [Google Scholar] [CrossRef]
- Carvalho, H.; Vale, A.; Marques, R.; Ventura, R.; Brouwer, Y.; Gonçalves, B. Remote inspection with multi-copters, radiological sensors and SLAM techniques. In EPJ Web of Conferences; Uppsala University: Uppsala, Sweden, 2018; Volume 170, p. 07014. [Google Scholar] [CrossRef]
- Chen, M.; Yang, S.; Yi, X.; Wu, D. Real-time 3D mapping using a 2D laser scanner and IMU-aided visual SLAM. In Proceedings of the 2017 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Okinawa, Japan, 14–18 July 2017; pp. 297–302. [Google Scholar] [CrossRef]
- Wen, W.; Hus, L.; Zhang, G. Performance Analysis of NDT-based Graph SLAM for Autonomous Vehicle in Diverse Typical Driving Scenarios of Hong Kong. Sensors 2018, 18, 3928. [Google Scholar] [CrossRef] [PubMed]
- Aldibaja, M.; Yanase, R.; Kim, T.H.; Kuramoto, A.; Yoneda, K.; Suganuma, N. Accurate Elevation Maps based Graph-Slam Framework for Autonomous Driving. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 1254–1261. [Google Scholar] [CrossRef]
- Wong, J.Y.; Reece, A.R. Prediction of rigid wheel performance based on the analysis of soil–wheel stresses, Part II. Performance of towed rigid wheels. J. Terramechanics 1967, 4, 7–25. [Google Scholar] [CrossRef]
- Bekker, M.G. Introduction to Terrain-Vehicle Systems; University of Michigan Press: Ann Arbor, MI, USA, 1969. [Google Scholar]
- Hayami, T.; Kaneko, F.; Kizuka, T. Differences in the Function of Somatosensory-Motor Integration depend on the Motor Experiences. Bio Mech. 2008, 19, 47–56. [Google Scholar]
- Proske, U.; Gandevia, A.C. The kinaesthetic senses. J. Physiol. 2009, 587, 4139–4146. [Google Scholar] [CrossRef]
- The National Aeronautics and Space Administration (NASA). NASA’s Artemis Rover to Land Near Nobile Region of Moon’s South Pole. Available online: https://www.nasa.gov/press-release/nasa-s-artemis-rover-to-land-near-nobile-region-of-moon-s-south-pole (accessed on 25 October 2022).
- The European Space Agency (ESA). Advanced-Concept Robots. Available online: https://www.esa.int/ESA_Multimedia/Keywords/Description/Moon_rover/(result_type)/videos (accessed on 28 October 2022).
- The Japan Aerospace Exploration Agency (JAXA). Data Acquisition on the Lunar Surface with a Transformable Lunar Robot, Assisting Development of the Crewed Pressurized Rover. Available online: https://global.jaxa.jp/press/2021/05/20210527-1_e.html (accessed on 27 October 2022).
- Mandt, K.; Deutsch, A.; Colaprete, A.; Cohen, B.A.; Heldmann, J. South Pole PSRs as Volatile Time Capsules for the Earth-Moon System: How Artemis Science Begins Building on LRO and LCROSS with the VIPER Mission. In Proceedings of the AGU Fall Meeting, Chicago, IL, USA, 12–16 December 2022. [Google Scholar]
- Ishigami, G.; Miwa, A.; Nagatani, K.; Yoshida, K. Terramechanics-based model for steering maneuver of planetary exploration rovers on loose soil. J. Field Robot. 2007, 24, 233–250. [Google Scholar] [CrossRef]
- Jia, Z.; Smith, W.; Peng, H. Terramechanics-based wheel–terrain interaction model and its applications to off-road wheeled mobile robots. Robotica 2012, 30, 491–503. [Google Scholar] [CrossRef]
- Yoshida, K.; Watanabe, T.; Mizuno, N.; Ishigami, G. Terramechanics-based analysis and traction control of a lunar/planetary rover. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar] [CrossRef]
- Wong, J.Y.; Reece, A.R. Prediction of rigid wheels performance based on analysis of soil-wheel stresses, Part I. performance of driven rigid wheels. J. Terramechanics 1967, 4, 81–98. [Google Scholar] [CrossRef]
- Wong, J.Y. Theory of Ground Vehicles, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Shirai, T.; Ishigami, G. Accurate Estimation of Wheel Pressure-Sinkage Traits on Sandy Terrain using In-wheel Sensor System. In Proceedings of the 12th International Symposium on Artificial Intelligence, Robotics and Automation in Space (iSAIRAS 2014), Montreal, QC, Canada, 17–19 June 2014. [Google Scholar]
- Gotoh, A. Postural Change due to Sensory Input. J. Kansai Phys. Ther. 2010, 10, 5–14. (In Japanese) [Google Scholar]
- Cheung, M.; Schmuckle, A. Multisensory postural control in adults: Variation in visual, haptic, and proprioceptive inputs. Hum. Mov. Sci. 2021, 79, 102845. [Google Scholar] [CrossRef] [PubMed]
- Watanabe, T.; Iizuka, K. Observation of Movement of Ground Particles Given Vibration When Rod Is Dragged. Int. J. Eng. Technol. 2022, 14, 1–8. [Google Scholar] [CrossRef]
- Akos, K. Geologic field work on Mars: Distance and time issues during surface exploration. Acta Astronaut. 2011, 68, 1686–1701. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modulus (Unit) | Value | Name of Parameters |
|---|---|---|
| g (m/s2) | 9.81 | Earth gravity |
| γ (kg/m3) | 1430 | Soil density |
| ϕ (°) | 22.3–32.5 | Internal friction angle |
| Description | Value |
|---|---|
| Slope angle (°) | 0 |
| Rotation speed (rpm) | 5.0 |
| Traveling distance (mm) | 500.0 |
| Number of trials (-) | 5 |
| Wheel diameter (mm) | 200 |
| Description | Value | |
|---|---|---|
| Ground condition | Silica sand No. 5, On Woods | Silica sand No. 5 (Table 1) |
| Weight (N) | 18, 27, 36, 54 | 27 |
| Drawbar mass (g) | 0 | 0, 100, 200, 300 |
| Slope angle (°) | 0 | |
| Rotation speed (rpm) | 5.0 | |
| Traveling distance (mm) | 500.0 | |
| Number of trials (-) | 5 | |
| Wheel diameter (mm) | 200 | |
| Camera Type | A/D10bit Monochrome (HAS-U1M) |
|---|---|
| Sensor | 1/2-inch CMOS |
| Shutter speed | Maximum 10 [μs] |
| Valid pixels | 1280 × 1024 |
| FPS | 60–4000 |
| Image processing software | Flownizer2D Ver.1.2.14 (DITECT Corporation, Oldbury, UK) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iizuka, K.; Inaba, K. Slip Estimation Using Variation Data of Strain of the Chassis of Lunar Rovers Traveling on Loose Soil. Remote Sens. 2023, 15, 4270. https://doi.org/10.3390/rs15174270
Iizuka K, Inaba K. Slip Estimation Using Variation Data of Strain of the Chassis of Lunar Rovers Traveling on Loose Soil. Remote Sensing. 2023; 15(17):4270. https://doi.org/10.3390/rs15174270
Chicago/Turabian StyleIizuka, Kojiro, and Kohei Inaba. 2023. "Slip Estimation Using Variation Data of Strain of the Chassis of Lunar Rovers Traveling on Loose Soil" Remote Sensing 15, no. 17: 4270. https://doi.org/10.3390/rs15174270
APA StyleIizuka, K., & Inaba, K. (2023). Slip Estimation Using Variation Data of Strain of the Chassis of Lunar Rovers Traveling on Loose Soil. Remote Sensing, 15(17), 4270. https://doi.org/10.3390/rs15174270