
Finding Misclassified Natura 2000 Habitats by Applying Outlier Detection to Sentinel-1 and Sentinel-2 Data



Abstract
:1. Introduction
2. Materials and Methods
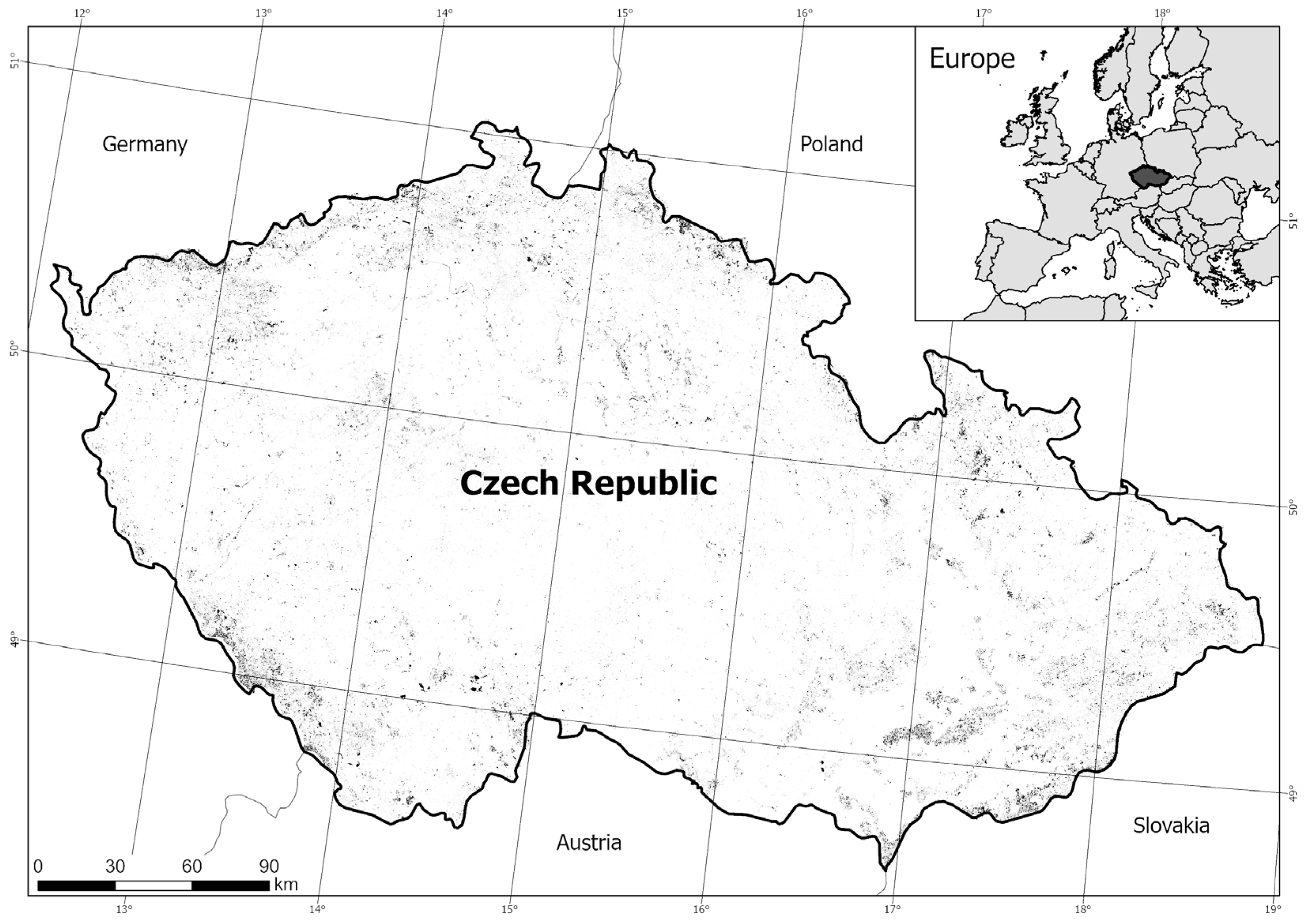
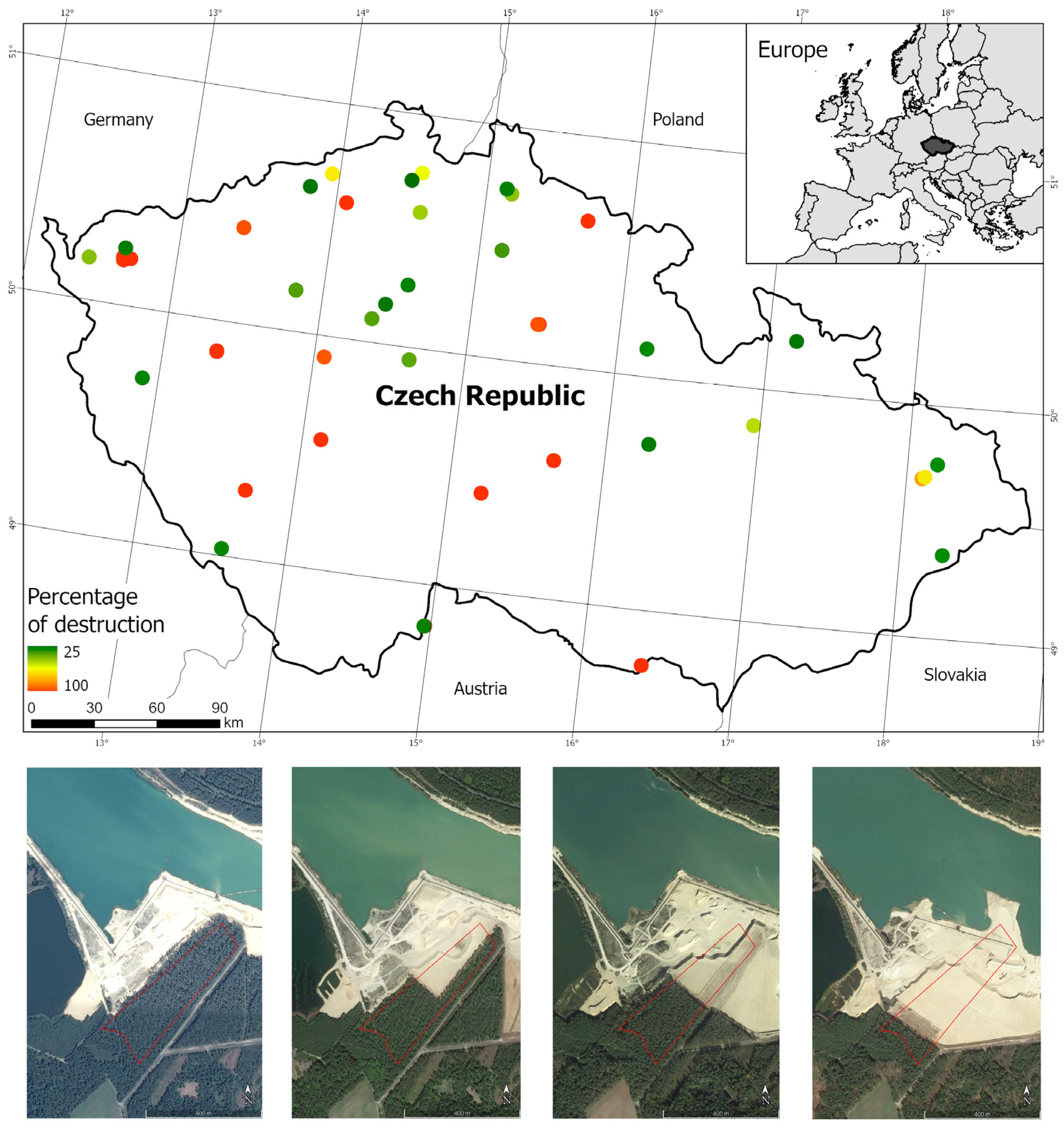
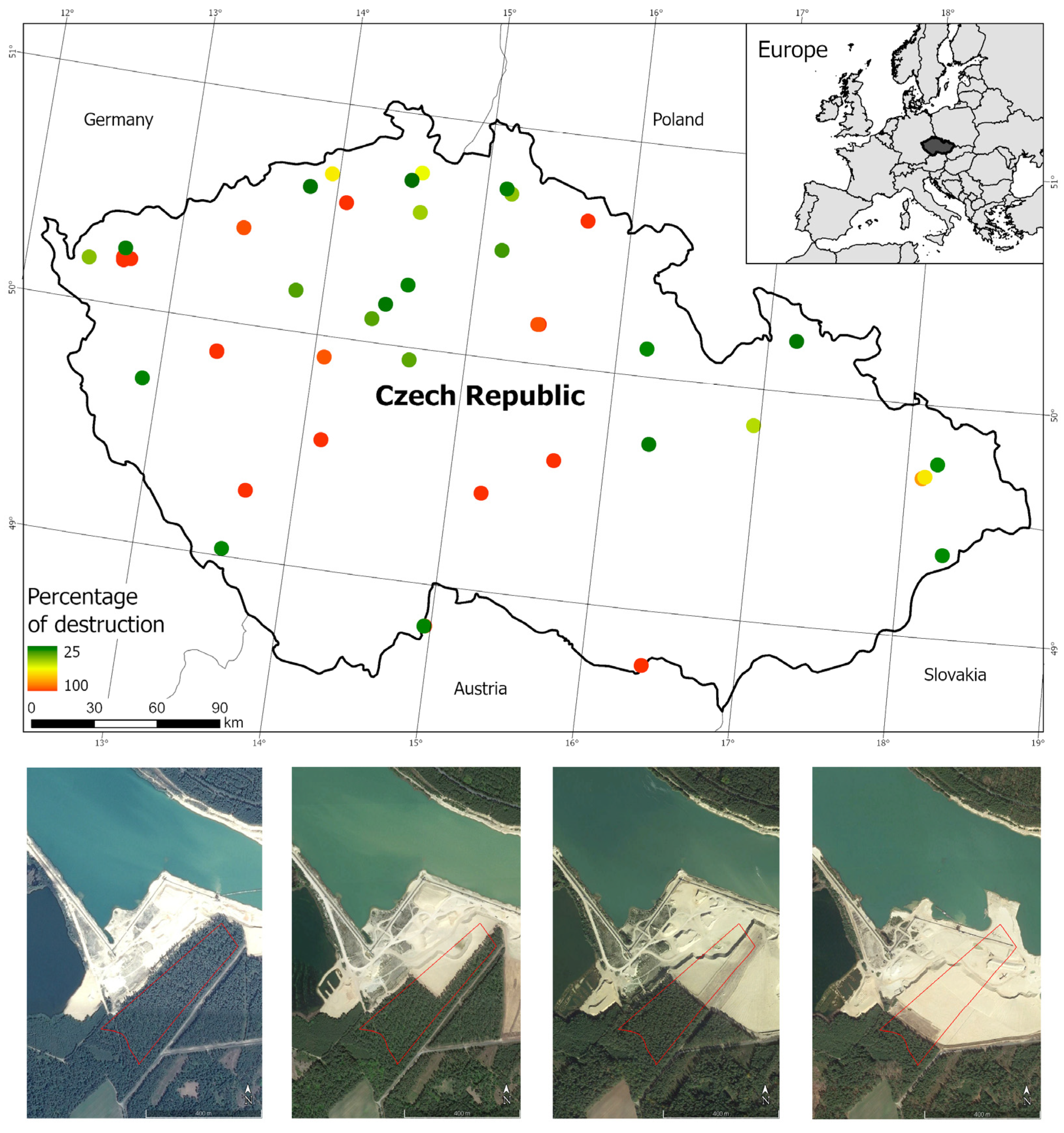
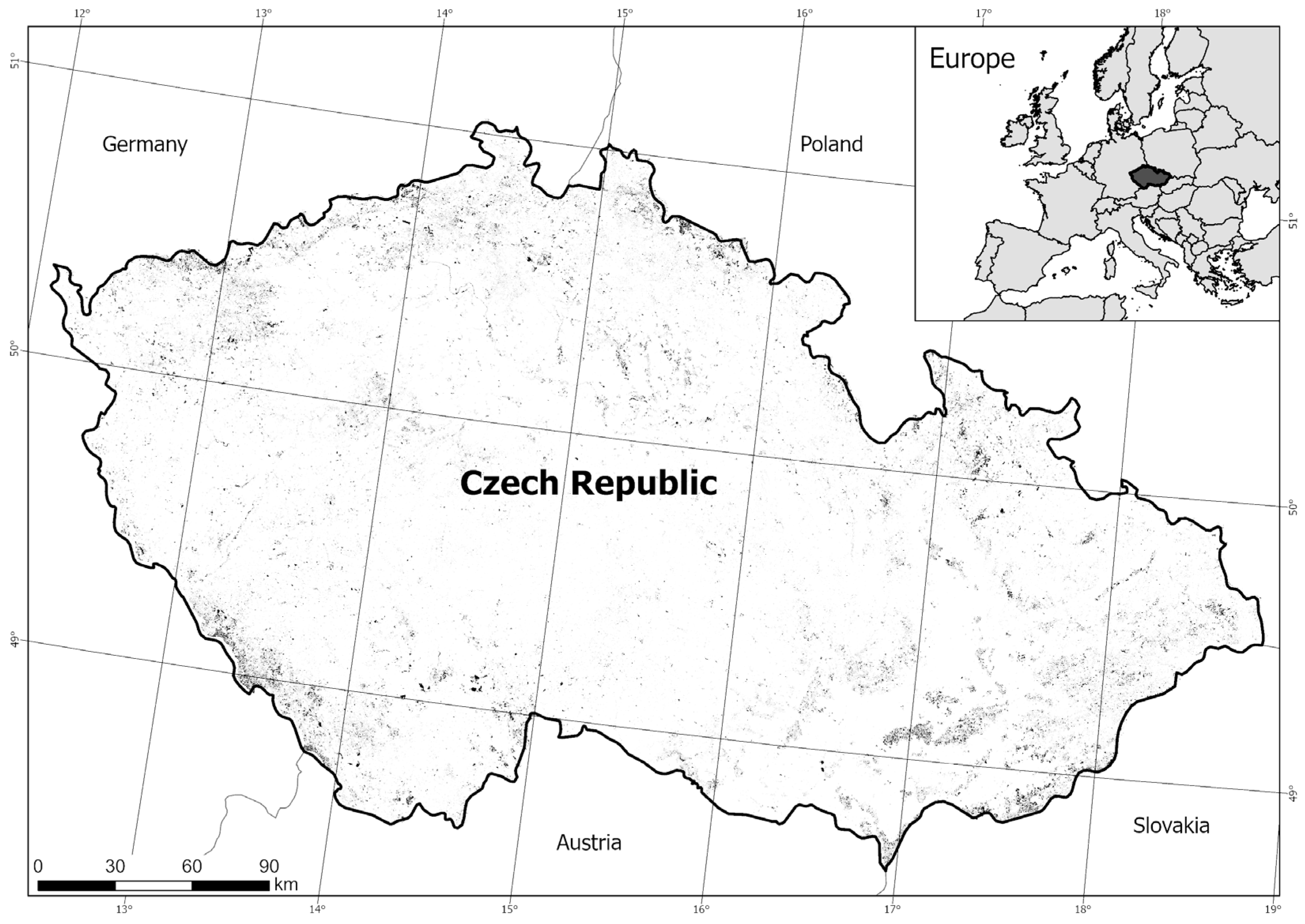
2.1. Study Area and Field-Based Habitat Data
2.2. Satellite and DEM Data
2.3. Spatial Data Processing
2.4. Spectral Outliers Detection
2.5. Method Validation
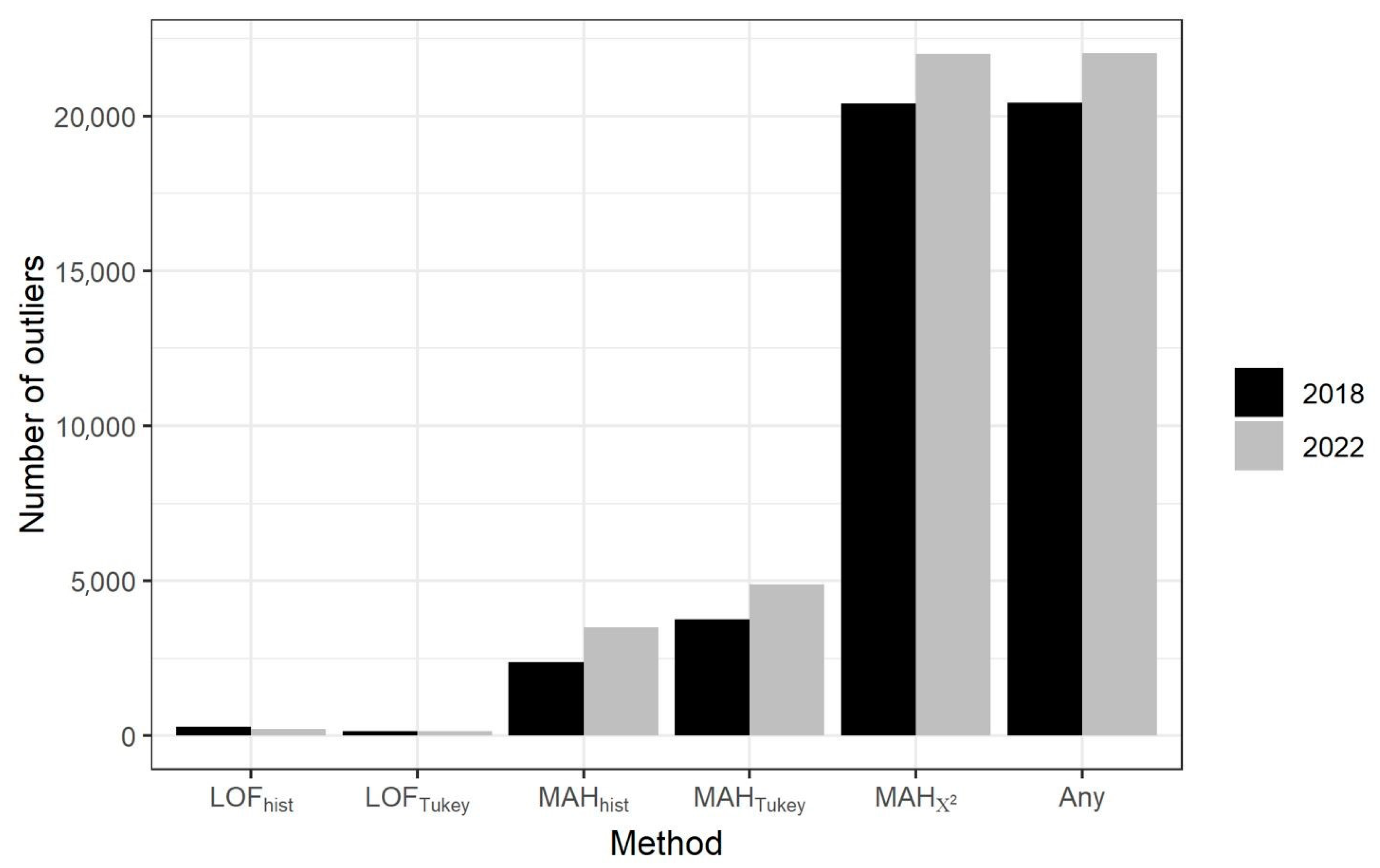
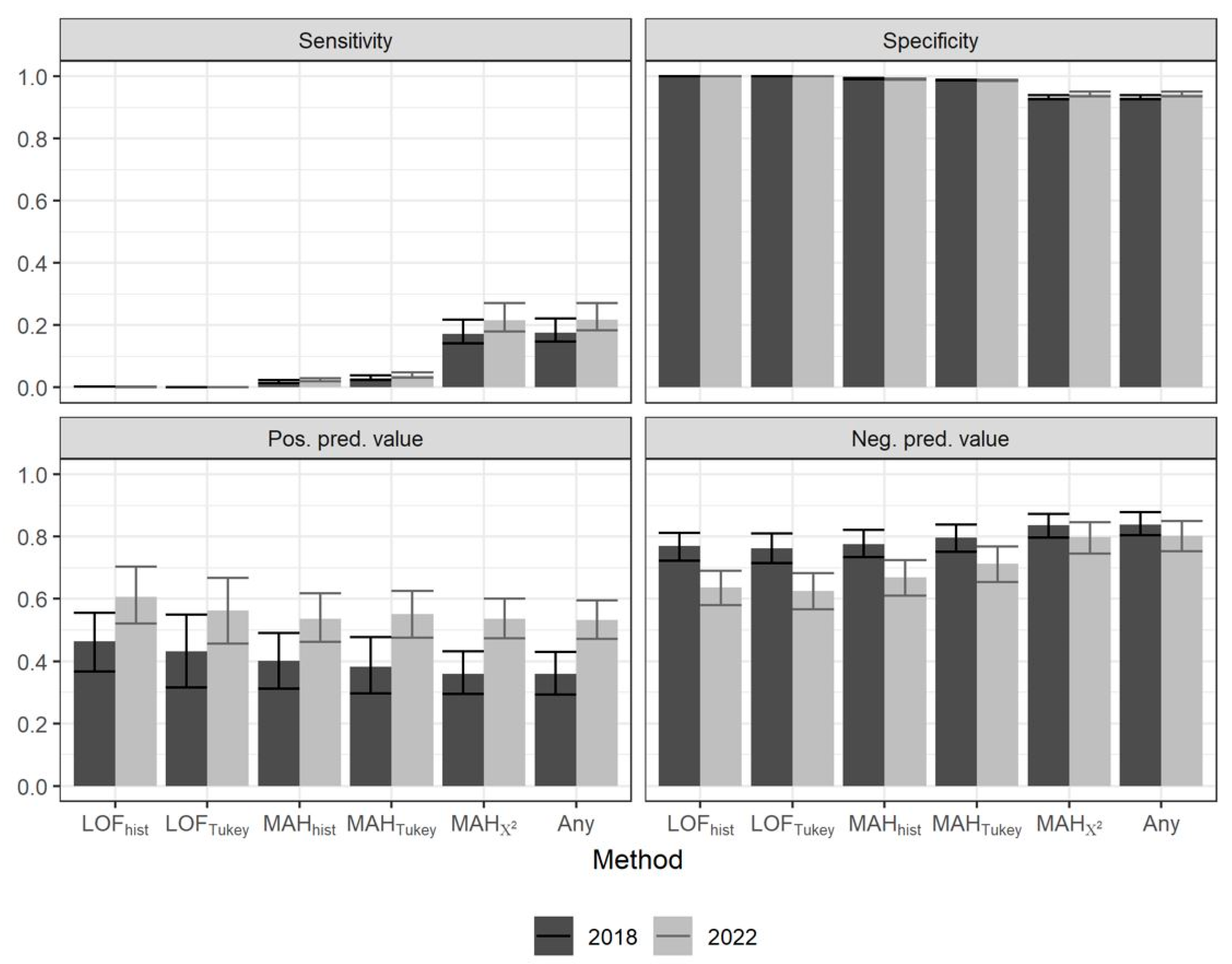
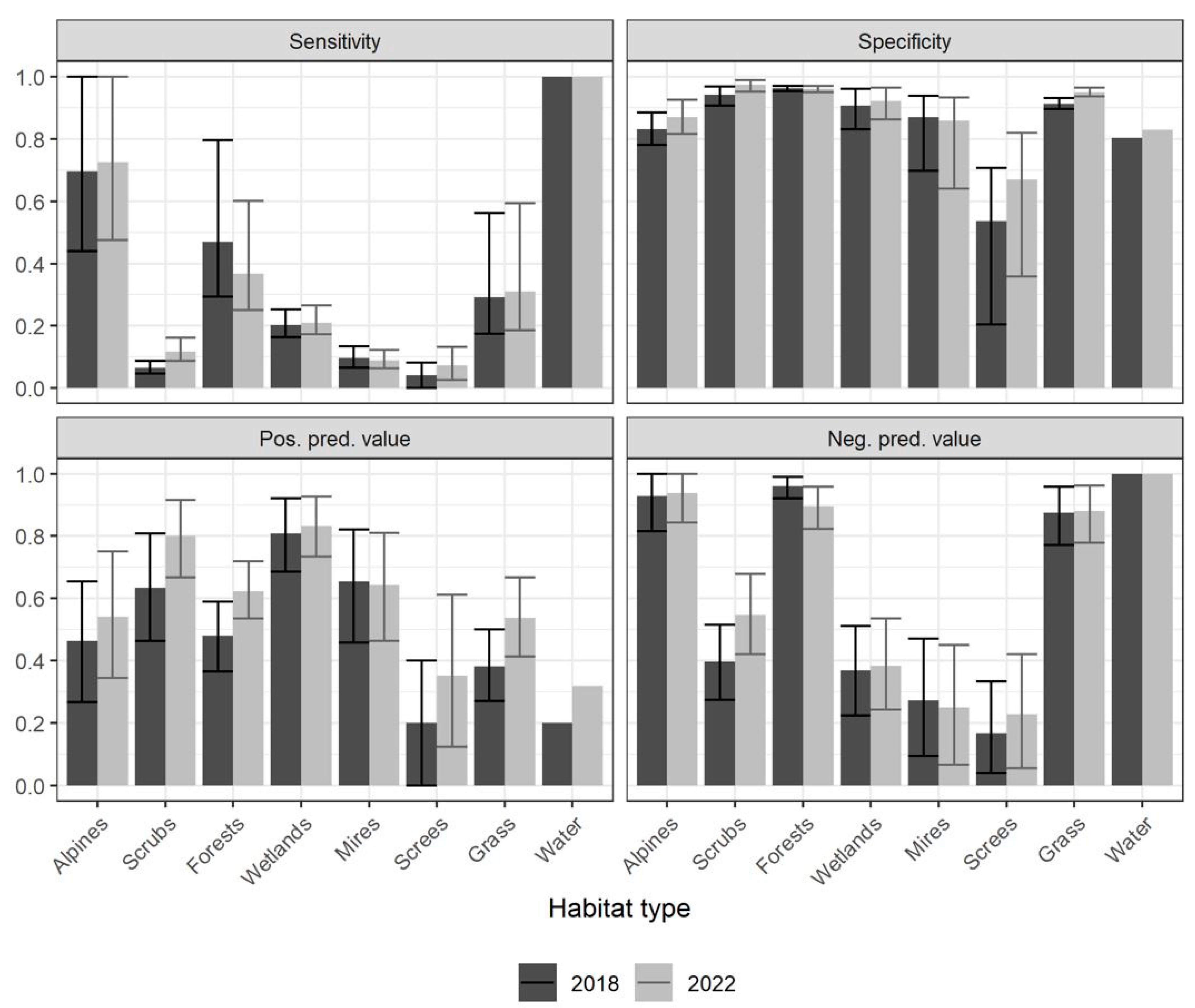
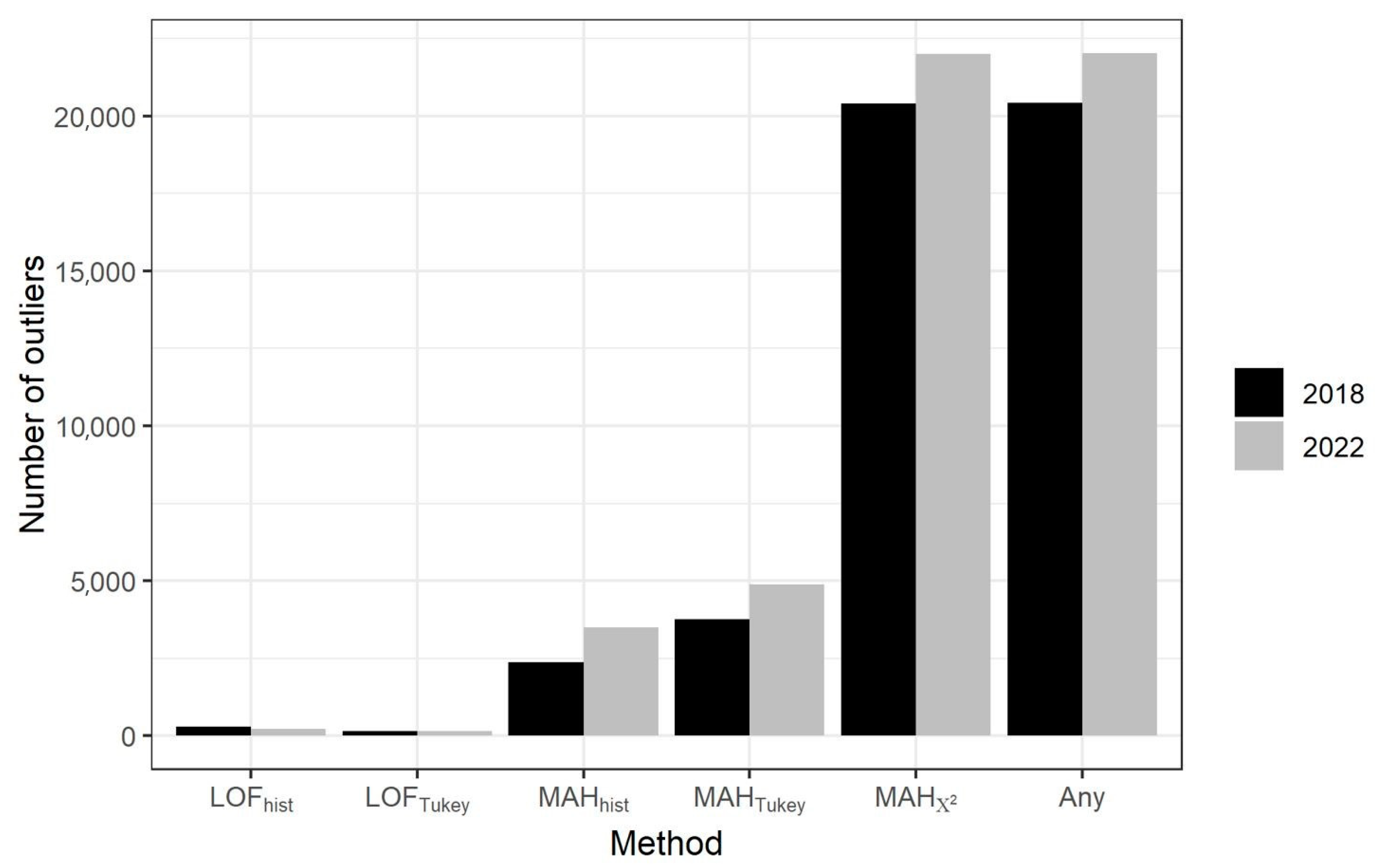
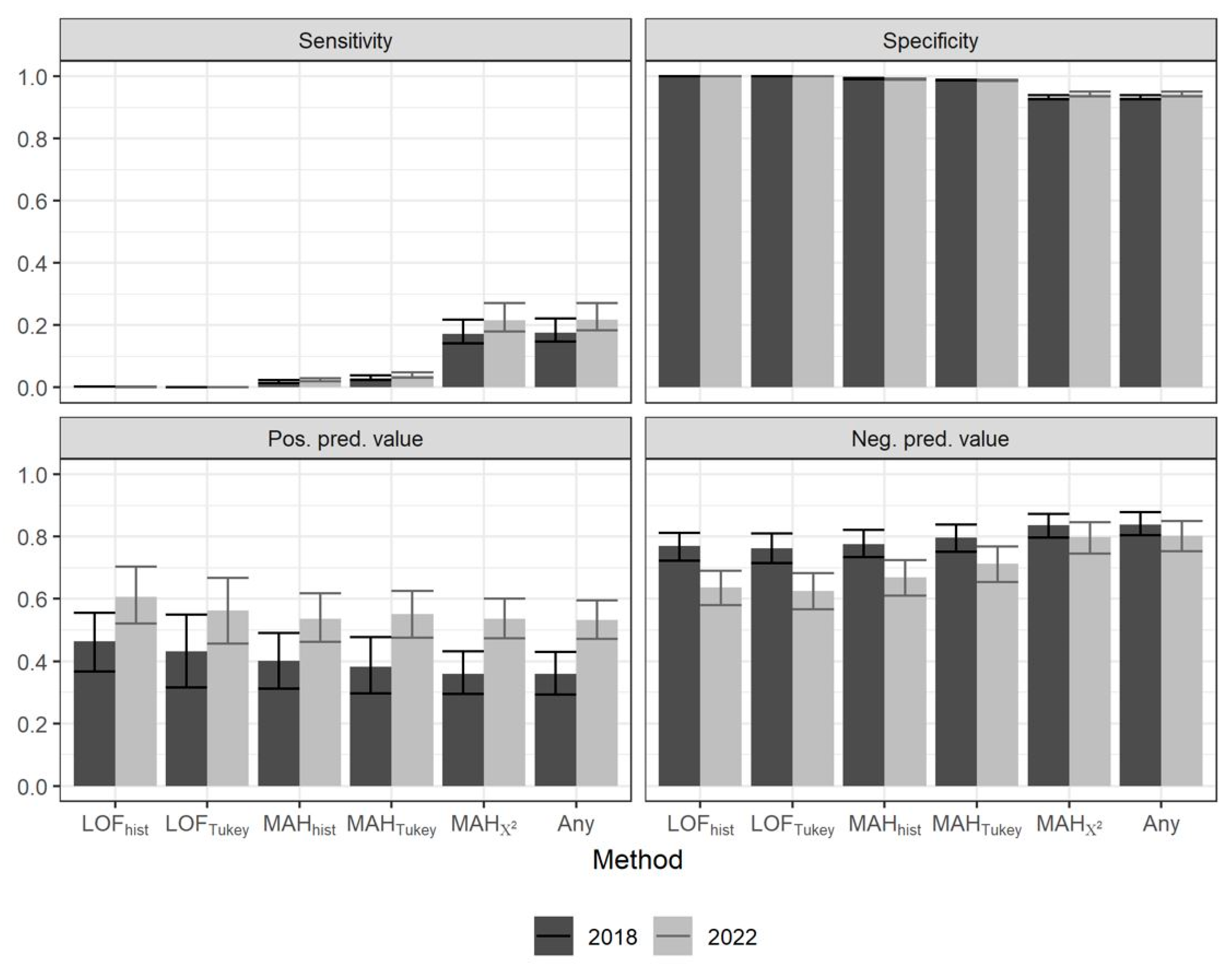
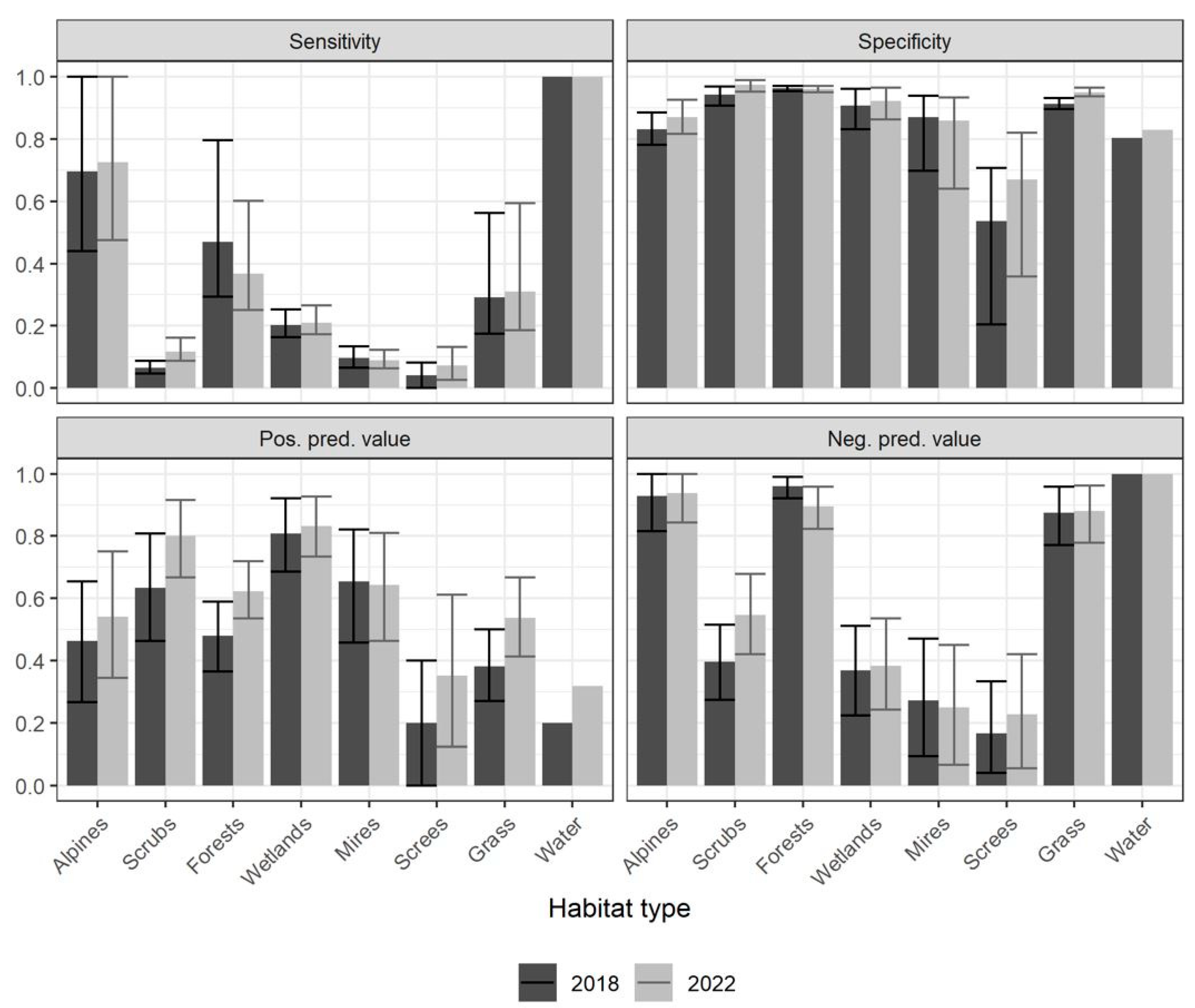
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Source | Variable | Polygon Aggregation |
|---|---|---|
| Sentinel-2 | Band n.2—blue | Average, Median, Std. deviation |
| Sentinel-2 | Band n.3—green | Average, Median, Std. deviation |
| Sentinel-2 | Band n.4—red | Average, Median, Std. deviation |
| Sentinel-2 | Band n.5—red edge 1 | Average, Median, Std. deviation |
| Sentinel-2 | Band n.6—red edge 2 | Average, Median, Std. deviation |
| Sentinel-2 | Band n.7—red edge 3 | Average, Median, Std. deviation |
| Sentinel-2 | Band n.8—NIR | Average, Median, Std. deviation |
| Sentinel-2 | Band n.8A—red edge 4 | Average, Median, Std. deviation |
| Sentinel-2 | Band n.11—SWIR | Average, Median, Std. deviation |
| Sentinel-2 | Band n.12—SWIR 2 | Average, Median, Std. deviation |
| Sentinel-1 | RADAR VH April | Average, Median, Std. deviation |
| Sentinel-1 | RADAR VH May | Average, Median, Std. deviation |
| Sentinel-1 | RADAR VH June | Average, Median, Std. deviation |
| Sentinel-1 | RADAR VH July | Average, Median, Std. deviation |
| Sentinel-1 | RADAR VH August | Average, Median, Std. deviation |
| Sentinel-1 | RADAR VH September | Average, Median, Std. deviation |
| Sentinel-1 | RADAR VH October | Average, Median, Std. deviation |
| EU DEM | Slope | Average |
| EU DEM | Altitude | Average |
| EU DEM | Aspect | Modus |
| NATURA 2000 | Polygon Size |
Appendix B
Appendix C
| Habitat Type | MAHhist | MAHTukey | MAH𝛘2 | LOFhist | LOFTukey | Any | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| # | % | # | % | # | % | # | % | # | % | # | % | |
| Alpines | 22 | 11.5 | 4 | 2.1 | 50 | 26 | 0 | 0 | 0 | 0 | 50 | 16.2 |
| Scrubs | 79 | 2.01 | 79 | 2 | 246 | 6.26 | 16 | 0.4 | 8 | 0.2 | 246 | 2.54 |
| Forests | 1304 | 0.84 | 2749 | 1.8 | 10625 | 6.82 | 113 | 0.1 | 57 | 0 | 10630 | 2.33 |
| Wetlands | 61 | 2.3 | 57 | 2.2 | 439 | 16.6 | 16 | 0.6 | 6 | 0.2 | 439 | 10.4 |
| Mires | 117 | 5.28 | 87 | 3.9 | 234 | 10.6 | 27 | 1.2 | 7 | 0.3 | 236 | 7 |
| Screes | 15 | 7.65 | 2 | 1 | 30 | 15.3 | 5 | 2.6 | 1 | 0.5 | 30 | 9.18 |
| Grass | 698 | 1.1 | 598 | 0.9 | 7537 | 11.8 | 96 | 0.2 | 46 | 0.1 | 7538 | 6.03 |
| Water | 81 | 1.53 | 190 | 3.6 | 1240 | 23.5 | 17 | 0.3 | 15 | 0.3 | 1240 | 19 |
| Habitat Type | MAHhist | MAHTukey | MAH𝛘2 | LOFhist | LOFTukey | Any | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| # | % | # | % | # | % | # | % | # | % | # | % | |
| Alpines | 23 | 12 | 2 | 1 | 45 | 23.4 | 14 | 7.3 | 1 | 0.5 | 46 | 24 |
| Scrubs | 136 | 3.46 | 80 | 2 | 276 | 7.02 | 23 | 0.6 | 12 | 0.3 | 276 | 7.02 |
| Forests | 1635 | 1.05 | 3166 | 2 | 13967 | 8.96 | 82 | 0.1 | 55 | 0 | 13974 | 8.97 |
| Wetlands | 82 | 3.09 | 67 | 2.5 | 435 | 16.4 | 19 | 0.7 | 10 | 0.4 | 435 | 16.4 |
| Mires | 86 | 3.88 | 73 | 3.3 | 227 | 10.3 | 10 | 0.5 | 7 | 0.3 | 228 | 10.3 |
| Screes | 21 | 10.7 | 0 | 0 | 29 | 14.8 | 2 | 1 | 0 | 0 | 29 | 14.8 |
| Grass | 1350 | 2.12 | 1324 | 2.1 | 5793 | 9.1 | 76 | 0.1 | 59 | 0.1 | 5793 | 9.1 |
| Water | 155 | 2.93 | 169 | 3.2 | 1230 | 23.3 | 8 | 0.2 | 8 | 0.2 | 1230 | 23.3 |
Appendix D
| Alpines | Scrubs | Forests | Wetlands | Mires | Screes | Grass | Water | |
|---|---|---|---|---|---|---|---|---|
| Alpines | 1.72 | 1.76 | 1.65 | 1.33 | 1.47 | 1.68 | 1.93 | |
| Scrubs | 1.72 | 0.93 | 1.08 | 1.30 | 0.99 | 1.14 | 1.98 | |
| Forests | 1.76 | 0.93 | 1.45 | 1.31 | 1.13 | 1.77 | 1.93 | |
| Wetlands | 1.65 | 1.08 | 1.45 | 1.16 | 1.32 | 1.05 | 1.56 | |
| Mires | 1.33 | 1.30 | 1.31 | 1.16 | 1.29 | 1.16 | 1.91 | |
| Screes | 1.47 | 0.99 | 1.13 | 1.32 | 1.29 | 1.66 | 1.89 | |
| Grass | 1.68 | 1.14 | 1.77 | 1.05 | 1.16 | 1.66 | 2.00 | |
| Water | 1.93 | 1.98 | 1.93 | 1.56 | 1.91 | 1.89 | 2.00 |
| Alpines | Scrubs | Forests | Wetlands | Mires | Screes | Grass | Water | |
|---|---|---|---|---|---|---|---|---|
| Alpines | 1.90 | 1.99 | 1.90 | 1.60 | 1.77 | 1.84 | 2.00 | |
| Scrubs | 1.90 | 1.01 | 1.39 | 1.40 | 1.17 | 1.21 | 2.00 | |
| Forests | 1.99 | 1.01 | 1.69 | 1.58 | 1.61 | 1.84 | 2.00 | |
| Wetlands | 1.90 | 1.39 | 1.69 | 1.47 | 1.58 | 1.58 | 1.86 | |
| Mires | 1.60 | 1.40 | 1.58 | 1.47 | 1.60 | 1.33 | 1.99 | |
| Screes | 1.77 | 1.17 | 1.61 | 1.58 | 1.60 | 1.75 | 1.99 | |
| Grass | 1.84 | 1.21 | 1.84 | 1.58 | 1.33 | 1.75 | 2.00 | |
| Water | 2.00 | 2.00 | 2.00 | 1.86 | 1.99 | 1.99 | 2.00 |
Appendix E
References
- Feilhauer, H.; Dahlke, C.; Doktor, D.; Lausch, A.; Schmidtlein, S.; Schulz, G.; Stenzel, S. Mapping the local variability of Natura 2000 habitats with remote sensing. Appl. Veg. Sci. 2014, 17, 765–779. [Google Scholar] [CrossRef]
- Lang, S.; Mairota, P.; Pernkopf, L.; Schioppa, E.P. Earth observation for habitat mapping and biodiversity monitoring. Int. J. Appl. Earth Obs. Geoinf. 2015, 37, 1–160. [Google Scholar] [CrossRef]
- Willis, K.S. Remote sensing change detection for ecological monitoring in United States protected areas. Biol. Conserv. 2015, 182, 233–242. [Google Scholar] [CrossRef]
- Vanden Borre, J.; Paelinckx, D.; Mücher, C.A.; Kooistra, L.; Haest, B.; De Blust, G.; Schmidt, A.M. Integrating remote sensing in Natura 2000 habitat monitoring: Prospects on the way forward. J. Nat. Conserv. 2011, 19, 116–125. [Google Scholar] [CrossRef]
- Le Dez, M.; Robin, M.; Launeau, P. Contribution of Sentinel-2 satellite images for habitat mapping of the Natura 2000 site ‘Estuaire de la Loire’ (France). Remote Sens. Appl. Soc. Environ. 2021, 24, 100637. [Google Scholar] [CrossRef]
- Marcinkowska-Ochtyra, A.; Ochtyra, A.; Raczko, E.; Kopeć, D. Natura 2000 Grassland Habitats Mapping Based on Spectro-Temporal Dimension of Sentinel-2 Images with Machine Learning. Remote Sens. 2023, 15, 1388. [Google Scholar] [CrossRef]
- Rapinel, S.; Rozo, C.; Delbosc, P.; Bioret, F.; Bouzillé, J.B.; Hubert-Moy, L. Contribution of free satellite time-series images to mapping plant communities in the Mediterranean Natura 2000 site: The example of Biguglia Pond in Corse (France). Mediterr. Bot. 2020, 41, 181–191. [Google Scholar] [CrossRef]
- Löfgren, O.; Prentice, H.C.; Moeckel, T.; Schmid, B.C.; Hall, K. Landscape history confounds the ability of the NDVI to detect fine-scale variation in grassland communities. Methods Ecol. Evol. 2018, 9, 2009–2018. [Google Scholar] [CrossRef]
- He, K.S.; Rocchini, D.; Neteler, M.; Nagendra, H. Benefits of hyperspectral remote sensing for tracking plant invasions. Divers. Distrib. 2011, 17, 381–392. [Google Scholar] [CrossRef]
- Middleton, M.; Närhi, P.; Arkimaa, H.; Hyvönen, E.; Kuosmanen, V.; Treitz, P.; Sutinen, R. Ordination and hyperspectral remote sensing approach to classify peatland biotopes along soil moisture and fertility gradients. Remote Sens. Environ. 2012, 124, 596–609. [Google Scholar] [CrossRef]
- Luft, L.; Neumann, C.; Itzerott, S.; Lausch, A.; Doktor, D.; Freude, M.; Blaum, N.; Jeltsch, F. Digital and real-habitat modeling of Hipparchia statilinus based on hyper spectral remote sensing data. Int. J. Environ. Sci. Technol. 2016, 13, 187–200. [Google Scholar] [CrossRef]
- Schmidt, J.; Fassnacht, F.E.; Förster, M.; Schmidtlein, S. Synergetic use of Sentinel-1 and Sentinel-2 for assessments of heathland conservation status. Remote Sens. Ecol. Conserv. 2018, 4, 225–239. [Google Scholar] [CrossRef]
- Erinjery, J.J.; Singh, M.; Kent, R. Mapping and assessment of vegetation types in the tropical rainforests of the Western Ghats using multispectral Sentinel-2 and SAR Sentinel-1 satellite imagery. Remote Sens. Environ. 2018, 216, 345–354. [Google Scholar] [CrossRef]
- Pechanec, V.; Machar, I.; Pohanka, T.; Opršal, Z.; Petrovič, F.; Švajda, J.; Šálek, L.; Chobot, K.; Filippovová, J.; Cudlín, P.; et al. Effectiveness of Natura 2000 system for habitat types protection: A case study from the Czech Republic. Nat. Conserv. 2018, 24, 21–41. [Google Scholar] [CrossRef]
- Härtel, H.; Lončáková, J.; Hošek, M. Mapování Biotopů v České Republice. Východiska, Výsledky, Perspektivy; Agentura Ochrany Přírody a Krajiny ČR: Praha, Czech Republic, 2009; ISBN 9788087051368. [Google Scholar]
- Divíšek, J.; Chytrý, M.; Grulich, V.; Poláková, L. Landscape classification of the Czech Republic based on the distribution of natural habitats. Preslia 2014, 86, 209–231. [Google Scholar]
- Schneider, J.; Ruda, A.; Kalasová, Ž.; Paletto, A. The forest stakeholders’ perception towards the NATURA 2000 network in the Czech Republic. Forests 2020, 11, 491. [Google Scholar] [CrossRef]
- Bastian, O.; Neruda, M.; Filipová, L.; Machová, I.; Leibenath, M. Natura 2000 Sites as an Asset for Rural Development: The German-Czech Ore Mountains Green Network Project. J. Landsc. Ecol. 2012, 3, 41–58. [Google Scholar] [CrossRef]
- Afaq, Y.; Manocha, A. Analysis on change detection techniques for remote sensing applications: A review. Ecol. Inform. 2021, 63, 101310. [Google Scholar] [CrossRef]
- Coops, N.C.; Wulder, M.A.; White, J.C. Identifying and describing forest disturbance and spatial pattern: Data selection issues and methodological implications. In Understanding Forest Disturbance and Spatial Pattern: Remote Sensing and GIS Approaches; CRC Press (Taylor and Francis): Boca Raton, FL, USA, 2007. [Google Scholar]
- Chytrý, M.; Kučera, T.; Kočí, M. Katalog Biotopů České Republiky; AOPK: Praha, Czech Republic, 2001. [Google Scholar]
- Forkuor, G.; Dimobe, K.; Serme, I.; Tondoh, J.E. Landsat-8 vs. Sentinel-2: Examining the added value of sentinel-2’s red-edge bands to land-use and land-cover mapping in Burkina Faso. GIScience Remote Sens. 2018, 55, 331–354. [Google Scholar] [CrossRef]
- Persson, M.; Lindberg, E.; Reese, H. Tree species classification with multi-temporal Sentinel-2 data. Remote Sens. 2018, 10, 1794. [Google Scholar] [CrossRef]
- Otunga, C.; Odindi, J.; Mutanga, O.; Adjorlolo, C. Evaluating the potential of the red edge channel for C3 (Festuca spp.) grass discrimination using Sentinel-2 and Rapid Eye satellite image data. Geocarto Int. 2019, 34, 1123–1143. [Google Scholar] [CrossRef]
- Ferrazzoli, P.; Paloscia, S.; Pampaloni, P.; Schiavon, G.; Solimini, D.; Coppo, P. Sensitivity of Microwave Measurements to Vegetation Biomass and Soil Moisture Content: A Case Study. IEEE Trans. Geosci. Remote Sens. 1992, 30, 750–756. [Google Scholar] [CrossRef]
- Paloscia, S.; Macelloni, G.; Pampaloni, P. The relations between backscattering coefficient and biomass of narrow and wide leaf crops. In Proceedings of the IGARSS ‘98. Sensing and Managing the Environment. 1998 IEEE International Geoscience and Remote Sensing. Symposium Proceedings. (Cat. No.98CH36174), Seattle, WA, USA, 6–10 July 1998; pp. 100–102. [Google Scholar]
- Macelloni, G.; Paloscia, S.; Pampaloni, P.; Marliani, F.; Gai, M. The relationship between the backscattering coefficient and the biomass of narrow and broad leaf crops. IEEE Trans. Geosci. Remote Sens. 2001, 39, 873–884. [Google Scholar] [CrossRef]
- Dobrinić, D.; Gašparović, M.; Medak, D. Sentinel-1 and 2 time-series for vegetation mapping using random forest classification: A case study of northern croatia. Remote Sens. 2021, 13, 2321. [Google Scholar] [CrossRef]
- Kaushik, S.K.; Mishra, V.N.; Punia, M.; Diwate, P.; Sivasankar, T.; Soni, A.K. Crop Health Assessment Using Sentinel-1 SAR Time Series Data in a Part of Central India. Remote Sens. Earth Syst. Sci. 2021, 4, 217–234. [Google Scholar] [CrossRef]
- Cracknell, A.P. Review article Synergy in remote sensing-what’s in a pixel? Int. J. Remote Sens. 1998, 19, 2025–2047. [Google Scholar] [CrossRef]
- Kirches, G. Algorithm Theoretical Basis Document Sentinel 2 Global Mosaics Copernicus Sentinel-2 Global Mosaic (S2GM) within the Global Land Component of the Copernicus Land Service. 2018. Available online: https://usermanual.readthedocs.io/en/1.1.2/_downloads/5a2d961d53dea1eb1117ec73e4cbff09/S2GM-SC2-ATBD-BC-v1.3.2.pdf (accessed on 20 December 2022).
- Esri Inc. ArcGIS Pro 2.7.0. 2020. Available online: https://www.esri.com/ (accessed on 20 December 2022).
- QGIS 3.22.1. 2021. Available online: https://qgis.org/ (accessed on 20 December 2022).
- Wang, A.J.; Zamar, R.; Alfiomarazziinsthospvdch, A.M.; Yohai, V.; Salibian-barrera, M.; Maronna, R.; Zivot, E.; Rocke, D.; Martin, D.; Maechler, M. robust: Port of the S+ “Robust Library”; R package version 0.7-1. 2022. Available online: https://cran.r-project.org/package=robust (accessed on 22 January 2023).
- Rousseeuw, P.J.; Van Driessen, K. A fast algorithm for the minimum covariance determinant estimator. Technometrics 1999, 41, 212–223. [Google Scholar] [CrossRef]
- Breunig, M.M.; Kriegel, H.P.; Ng, R.T.; Sander, J. LOF: Identifying Density-Based Local Outliers. In Proceedings of the SIGMOD ‘00: Proceedings of the 2000 ACM SIGMOD International Conference on Management of Data, Dallas, TX, USA, 15–18 May 2000; pp. 93–104. [Google Scholar]
- Privé, F. Utility Functions for Large-Scale Data; R package version 0.3.4. 2021. Available online: https://cran.r-project.org/package=bigutilsr (accessed on 22 January 2023).
- Hubert, M.; Vandervieren, E. An adjusted boxplot for skewed distributions. Comput. Stat. Data Anal. 2008, 52, 5186–5201. [Google Scholar] [CrossRef]
- Scott, D.W. On optimal and data-based histograms. Biometrika 1979, 66, 605–610. [Google Scholar] [CrossRef]
- Arifin, W.N.; Yusof, U.K. Correcting for partial verification bias in diagnostic accuracy studies: A tutorial using R. Stat. Med. 2022, 41, 1709–1727. [Google Scholar] [CrossRef] [PubMed]
- Arifin, W.N. PVBcorrect: Partial Verification Bias Correction for Estimates of Accuracy Measures in Diagnostic Accuracy Studies; R package version 0.1.1. 2023. Available online: https://rdrr.io/github/wnarifin/PVBcorrect/man/PVBcorrect.html (accessed on 22 January 2023).
- Kirschner, V.; Franke, D.; Řezáčová, V.; Peltan, T. Poorer Regions Consume More Undeveloped but Less High-Quality Land Than Wealthier Regions—A Case Study. Land 2023, 12, 113. [Google Scholar] [CrossRef]
- Shi, Z.; Li, P.; Sun, Y. An outlier generation approach for one-class random forests: An example in one-class classification of remote sensing imagery. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 5107–5110. [Google Scholar]
- Perrone, M.; Di Febbraro, M.; Conti, L.; Divíšek, J.; Chytrý, M.; Keil, P.; Carranza, M.L.; Rocchini, D.; Torresani, M.; Moudrý, V.; et al. The relationship between spectral and plant diversity: Disentangling the influence of metrics and habitat types at the landscape scale. Remote Sens. Environ. 2023, 293, 113591. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, J.; Wang, C.; Lin, H.; Long, J.; Zhao, L.; Fu, H.; Liu, Z. Forest growing stock volume estimation in subtropical mountain areas using PALSAR-2 L-Band PolSAR data. Forests 2019, 10, 276. [Google Scholar] [CrossRef]
- Nazarova, T.; Martin, P.; Giuliani, G. Monitoring vegetation change in the presence of high cloud cover with sentinel-2 in a lowland tropical forest region in Brazil. Remote Sens. 2020, 12, 1829. [Google Scholar] [CrossRef]
- Flood, N. Seasonal composite landsat TM/ETM+ Images using the medoid (a multi-dimensional median). Remote Sens. 2013, 5, 6481–6500. [Google Scholar] [CrossRef]
| Band Number | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 8a | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|
| Band name | Blue | Green | Red | Red Edge | Red Edge | Red Edge | NIR | Red Edge | SWIR | SWIR |
| Center (nm) | 490 | 560 | 665 | 705 | 740 | 783 | 842 | 865 | 1610 | 2190 |
| Width (nm) | 65 | 35 | 30 | 15 | 15 | 20 | 115 | 20 | 90 | 180 |
| Spatial resolution (m) | 10 | 10 | 10 | 20 | 20 | 20 | 10 | 20 | 20 | 20 |
| Habitat Type | Mapping Errors 2018 | Mapping Errors 2022 | Outliers (“Any”) 2018 | Outliers (“Any”) 2022 | ||||
|---|---|---|---|---|---|---|---|---|
| Number | % | Number | % | Number | % | Number | % | |
| Alpines | 15 | 26.79 | 15 | 26.79 | 28 | 50.00 | 25 | 44.64 |
| Scrubs | 57 | 61.29 | 56 | 60.22 | 30 | 32.26 | 40 | 43.01 |
| Forests | 41 | 23.03 | 70 | 39.55 | 78 | 43.82 | 104 | 58.43 |
| Wetlands | 67 | 72.04 | 69 | 74.19 | 47 | 50.54 | 54 | 58.06 |
| Mires | 33 | 68.75 | 33 | 68.75 | 26 | 54.17 | 29 | 60.42 |
| Screes | 23 | 58.97 | 23 | 58.97 | 15 | 38.46 | 17 | 43.59 |
| Grass | 32 | 27.59 | 41 | 35.65 | 68 | 58.62 | 65 | 56.03 |
| Water | 14 | 14.14 | 23 | 23.23 | 70 | 70.71 | 72 | 72.73 |
| Total | 282 | 39.06 | 15 | 26.79 | 331 | 45.84 | 406 | 56.23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moravec, D.; Barták, V.; Šímová, P. Finding Misclassified Natura 2000 Habitats by Applying Outlier Detection to Sentinel-1 and Sentinel-2 Data. Remote Sens. 2023, 15, 4409. https://doi.org/10.3390/rs15184409
Moravec D, Barták V, Šímová P. Finding Misclassified Natura 2000 Habitats by Applying Outlier Detection to Sentinel-1 and Sentinel-2 Data. Remote Sensing. 2023; 15(18):4409. https://doi.org/10.3390/rs15184409
Chicago/Turabian StyleMoravec, David, Vojtěch Barták, and Petra Šímová. 2023. "Finding Misclassified Natura 2000 Habitats by Applying Outlier Detection to Sentinel-1 and Sentinel-2 Data" Remote Sensing 15, no. 18: 4409. https://doi.org/10.3390/rs15184409
APA StyleMoravec, D., Barták, V., & Šímová, P. (2023). Finding Misclassified Natura 2000 Habitats by Applying Outlier Detection to Sentinel-1 and Sentinel-2 Data. Remote Sensing, 15(18), 4409. https://doi.org/10.3390/rs15184409