
RADAR Echo Recognition of Squall Line Based on Deep Learning

 ,
,  ,
,
Abstract
:Highlights
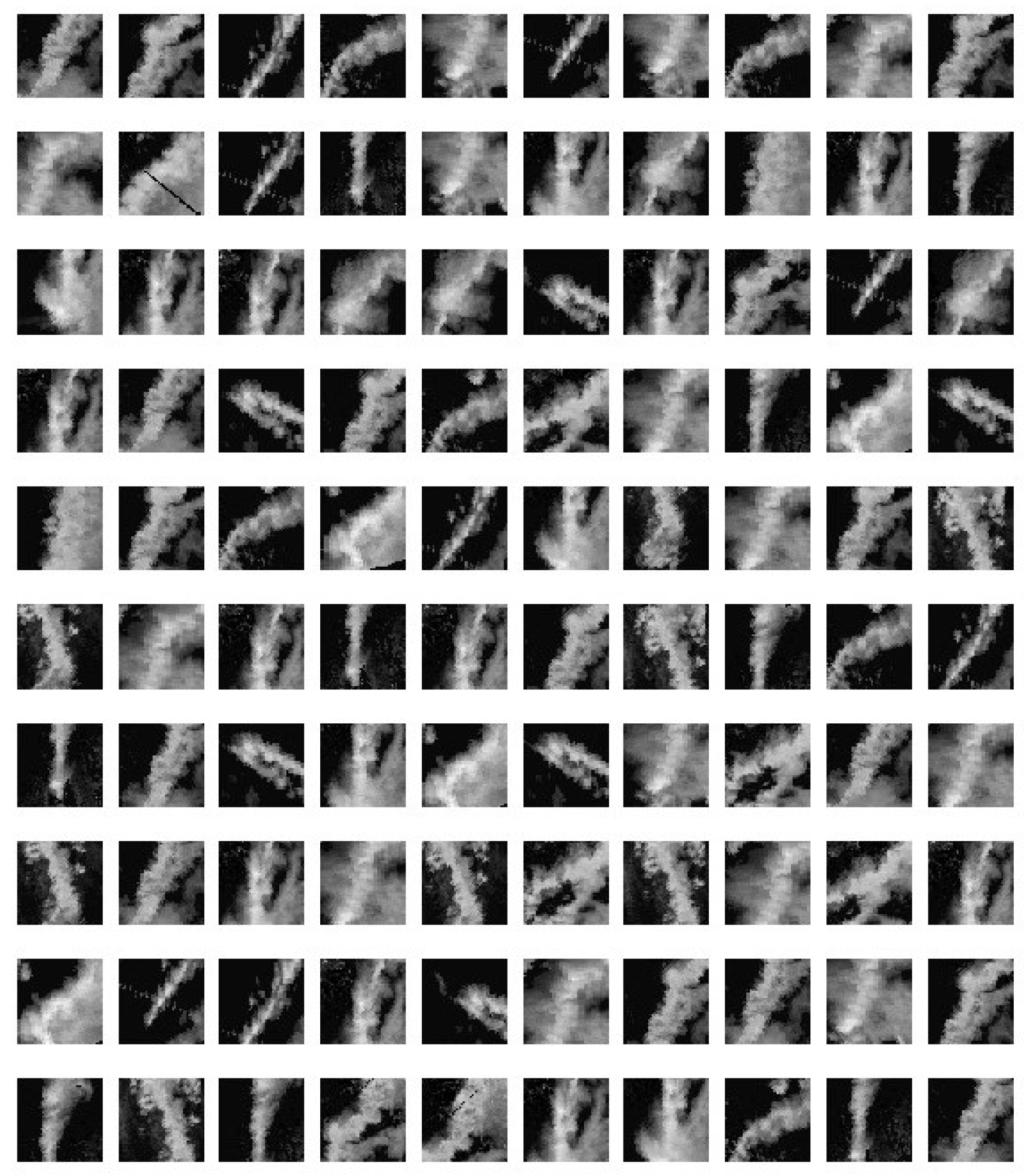
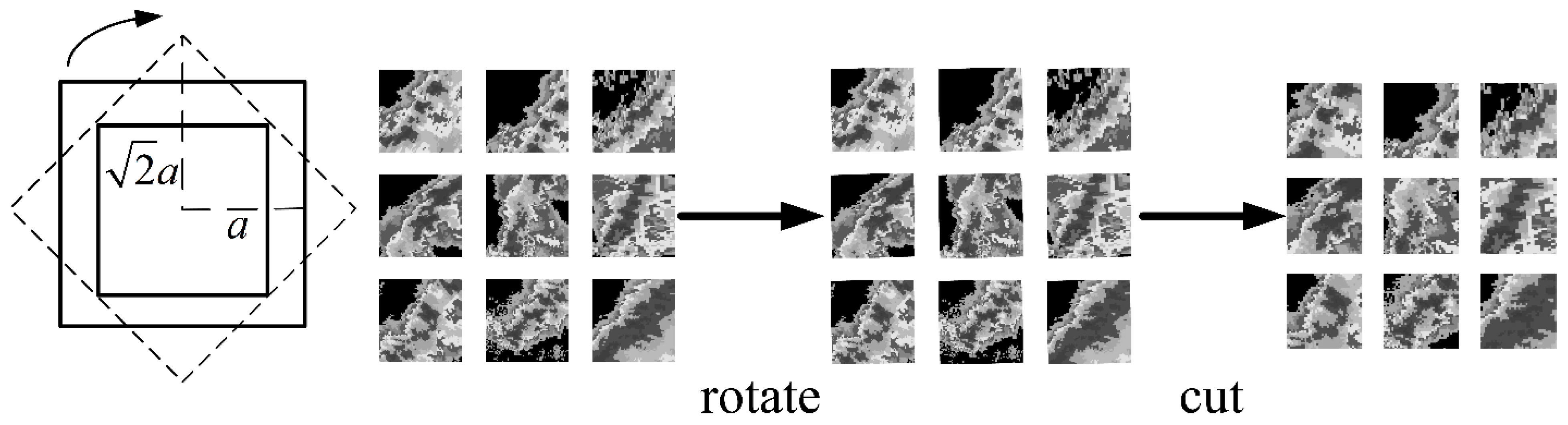
- A deep learning dataset of squall lines with over 49,920 samples was constructed based on RADAR-base data by means of manual classification and data augment.
- Three squall lines automatic recognition modes are trained according to the distance of label data away from RADARs.
- The models have good generalization ability which can effectively capture the characteristics of squall lines from RADAR-base data to realize its automatic recognition well.
Abstract
1. Introduction
2. Data and Methods
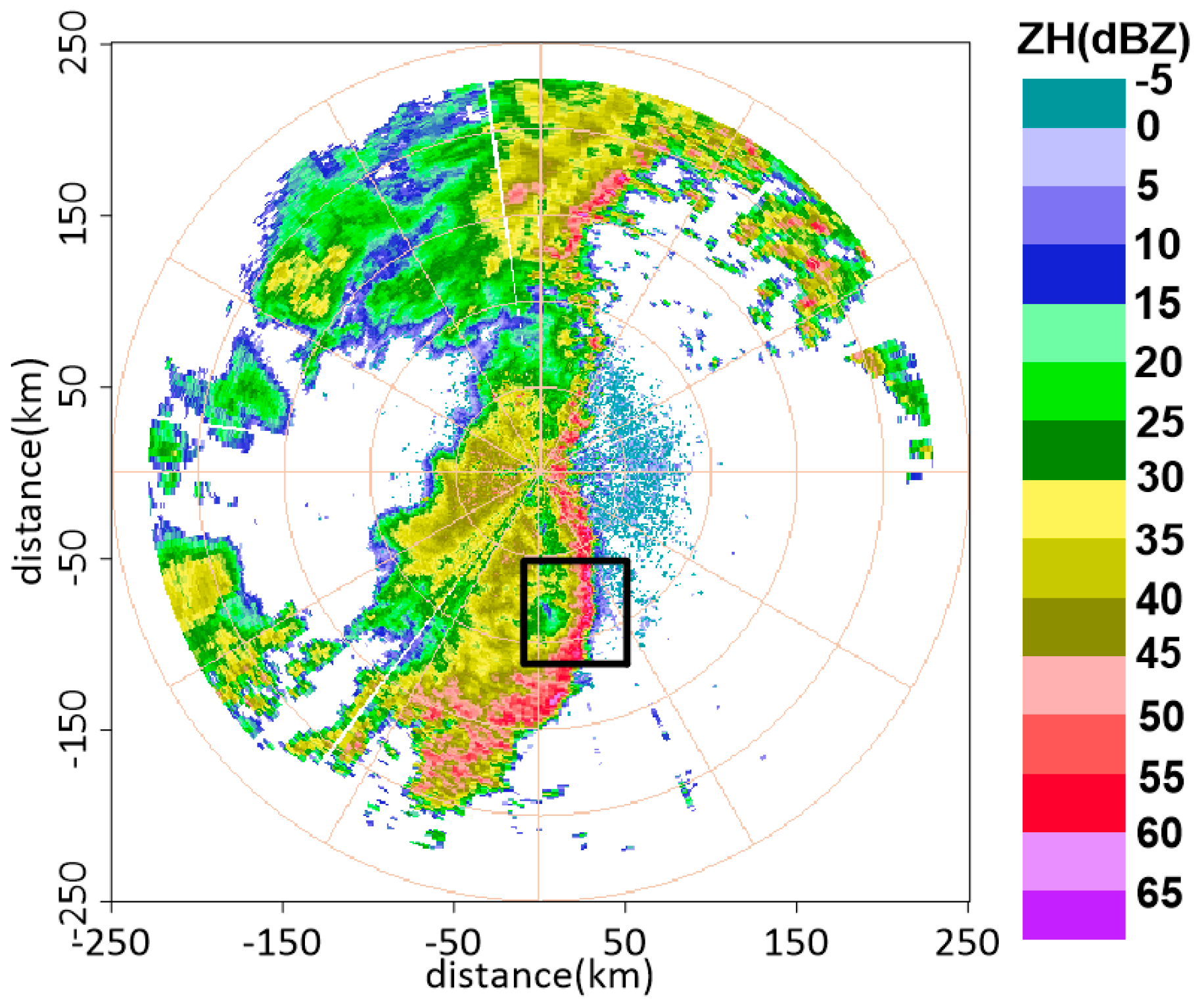
2.1. Data Sources
2.2. Dataset Construction
2.3. Algorithm Introduction
3. Model Construction
3.1. Evaluation Indicators
3.2. Model Training
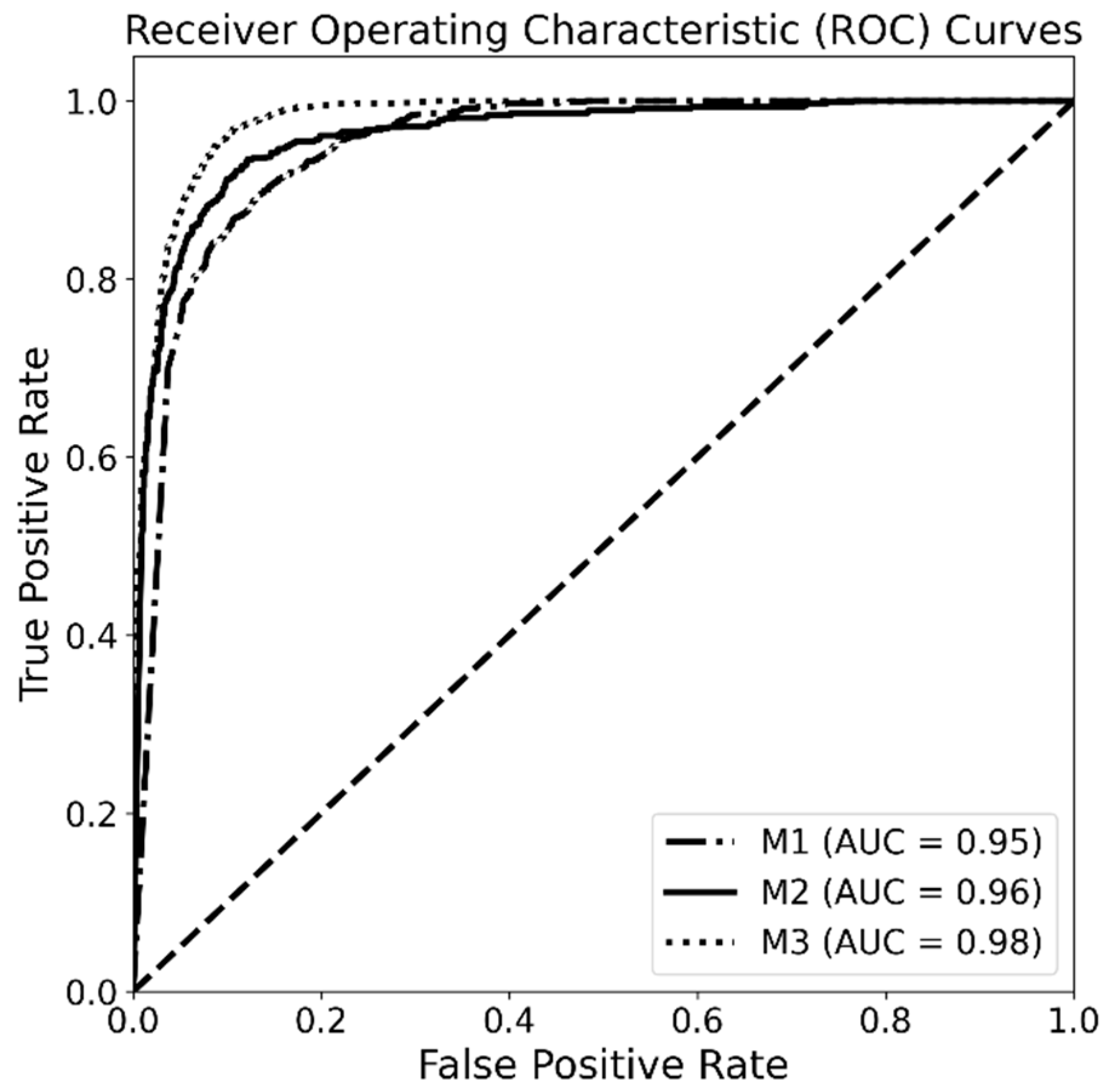
3.3. Model Evaluation
4. Model Demonstration
4.1. Nanjing RADAR
4.2. Yancheng RADAR
4.3. Qingpu RADAR
5. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Smythe, G.R.; Zrnic, D.S. Correlation Analysis of Doppler Radar Data and Retrieval of the Horizontal Wind. J. Appl. Meteorol. Climatol. 1983, 22, 297–311. [Google Scholar] [CrossRef]
- Rinehart, R.E.; Garvey, E.T. Three-Dimensional Storm Motion Detection by Conventional Weather Radar. Nature 1978, 273, 287–289. [Google Scholar] [CrossRef]
- Zou, H.; Wu, S.; Shan, J.; Yi, X. A Method of Radar Echo Extrapolation Based on TREC and Barnes Filter. J. Atmos. Ocean. Technol. 2019, 36, 1713–1727. [Google Scholar] [CrossRef]
- Johnson, J.T.; MacKeen, P.L.; Witt, A.; Mitchell, E.D.W.; Stumpf, G.J.; Eilts, M.D.; Thomas, K.W. The Storm Cell Identification and Tracking Algorithm: An Enhanced WSR-88D Algorithm. Weather Forecast. 1998, 13, 263–276. [Google Scholar] [CrossRef]
- Wang, L.; Wang, H.; Heng, Z. A Rapid Identification and Warning Method for Severe Weather via Doppler Radar Based on an Improved TITAN Algorithm. J. Atmos. Sol.-Terr. Phys. 2019, 193, 105080. [Google Scholar] [CrossRef]
- Wang, X.; Bian, H.; Qian, D.; Miao, C.; Zhan, S. An Automatic Identifying Method of the Squall Line Based on Hough Transform. Multimed. Tools Appl. 2021, 80, 18993–19009. [Google Scholar] [CrossRef]
- Rosenblatt, F. The Perceptron: A Probabilistic Model for Information Storage and Organization in the Brain. Psychol. Rev. 1958, 65, 386–408. [Google Scholar] [CrossRef] [PubMed]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning Representations by Back-Propagating Errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.-W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the Advances in Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Curran Associates, Inc.: Red Hook, NY, USA, 2012; Volume 25. [Google Scholar]
- LeCun, Y.; Boser, B.; Denker, J.; Henderson, D.; Howard, R.; Hubbard, W.; Jackel, L. Handwritten Digit Recognition with a Back-Propagation Network. In Proceedings of the Advances in Neural Information Processing Systems, Denver, CO, USA, 27–30 November 1989; Morgan-Kaufmann: Burlington, MA, USA, 1989; Volume 2. [Google Scholar]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-Based Learning Applied to Document Recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2015. [Google Scholar] [CrossRef]
- Zhou, K.; Zheng, Y.; Li, B.; Dong, W.; Zhang, X. Forecasting Different Types of Convective Weather: A Deep Learning Approach. J. Meteorol. Res. 2019, 33, 797–809. [Google Scholar] [CrossRef]
- Xiao, H.; Wang, Y.; Zheng, Y.; Zheng, Y.; Zhuang, X.; Wang, H.; Gao, M. Convective-Gust Nowcasting Based on Radar Reflectivity and a Deep Learning Algorithm. Geosci. Model Dev. 2023, 16, 3611–3628. [Google Scholar] [CrossRef]
- Guo, S.; Sun, N.; Pei, Y.; Li, Q. 3D-UNet-LSTM: A Deep Learning-Based Radar Echo Extrapolation Model for Convective Nowcasting. Remote Sens. 2023, 15, 1529. [Google Scholar] [CrossRef]
- Chen, G.T.J.; Chou, H.C. General Characteristics of Squall Lines Observed in TAMEX. Mon. Weather Rev. 1993, 121, 726–733. [Google Scholar] [CrossRef]
- Geerts, B. Mesoscale Convective Systems in the Southeast United States during 1994–95: A Survey. Weather Forecast. 1998, 13, 860–869. [Google Scholar] [CrossRef]
- Liu, L.P.; Wu, L.L.; Yang, Y.M. Development of Fuzzy-Logical Two-Step Ground Clutter Detection Algorithm. Acta Meteorol. Sin. 2007, 65, 252–260. (In Chinese) [Google Scholar] [CrossRef]
- Hu, Z.; Liu, L.; Chu, R.; Jin, R. Comparison of different attenuation correction methods and their effects on estimated rainfall using x-band dual linear polarimetric radar. Acta Meteorol. Sin. 2008, 66, 251–261. (In Chinese) [Google Scholar] [CrossRef]
- Feng, L.; Liping, L.; Hongyan, W.; Yuan, J. Identification of Non-Precipitation Meteorological Echoes with Doppler Weather Radar. J. Appl. Meteorol. Sci. 2012, 23, 147–158. (In Chinese) [Google Scholar]
- Zheng, J.; Liu, L. Ka-Band Millimeter Wave Cloud Radar Data Quality Control. J. Infrared Millim. Waves 2016, 35, 748–757. (In Chinese) [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | RADAR Station, Time | Serial Number | RADAR Station, Time |
|---|---|---|---|
| 1 | Nanjing 2019-04-09 00:00–05:00 | 20 | Linyi 2020-05-23 03:00–11:00 |
| 2 | Nanjing 2019-07-06 05:00–12:00 | 21 | Qingdao 2020-05-23 03:00–10:00 |
| 3 | Nantong 2019-07-06 10:00–13:00 | 22 | Jinan 2020-05-23 03:00–11:00 |
| 4 | Yancheng 2019-07-06 05:00–10:00 | 23 | Jinan 2020-06-01 07:00–12:00 |
| 5 | Xuzhou 2019-07-06 00:00–06:00 | 24 | Linyi 2020-06-01 07:00–12:00 |
| 6 | Huaian 2019-07-06 00:00–11:00 | 25 | Jinan 2020-06-25 12:00–23:00 |
| 7 | Lianyungang 2019-07-06 00:00–10:00 | 26 | Shijiazhuang 2020-06-25 12:00–15:00 |
| 8 | Changzhou 2019-07-06 05:00–15:00 | 27 | Nanjing 2020-06-12 00:00–12:00 |
| 9 | Taizhou 2019-07-06 06:00–16:00 | 28 | Nantong 2020-06-12 00:00–12:00 |
| 10 | Weifang 2019-08-16 06:00–10:00 | 29 | Yancheng 2020-06-12 00:00–12:00 |
| 11 | Linyi 2019-08-16 06:00–10:00 | 30 | Xuzhou 2020-06-12 00:00–12:00 |
| 12 | Qingdao 2019-08-16 06:00–10:00 | 31 | Huai’an 2020-06-12 00:00–12:00 |
| 13 | Jinan 2020-05-03 13:00–15:00 | 32 | Lianyungang 2020-06-12 00:00–12:00 |
| 14 | Linyi 2020-05-11 23:00–24:00 | 33 | Changzhou 2020-06-12 00:00–12:00 |
| 15 | Jinan 2020-05-16 08:00–16:00 | 34 | Taizhou 2020-06-12 00:00–12:00 |
| 16 | Jinan 2020-05-17 10:00–16:00 | 35 | Qingpu 2021-04-30 00:00–24:00 |
| 17 | Qingdao 2020-05-17 10:00–17:00 | 36 | Nantong 2021-04-30 00:00–24:00 |
| 18 | Yantai 2020-05-17 10:00–17:00 | 37 | Lianyungang 2021-04-30 00:00–24:00 |
| 19 | Linyi 2020-05-17 10:00–17:00 |
| Model | Total Number | Training Set | Test Set |
|---|---|---|---|
| M1 | 4090 | 3272 | 818 |
| M2 | 28,020 | 22,416 | 5604 |
| M3 | 17,810 | 14,248 | 3562 |
| Category | The Real Situation | ||
|---|---|---|---|
| Positive Sample | Negative Sample | ||
| Predicted Results | Positive case | TP | FP |
| Negative case | FN | TN | |
| Model | Accuracy | POD | FAR | CSI |
|---|---|---|---|---|
| M1 | 86.9% | 94.1% | 20.3% | 78.3% |
| M2 | 90.1% | 87.8% | 7.6% | 81.6% |
| M3 | 92.3% | 91.3% | 6.6% | 85.6% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, P.; Hu, Z.; Yuan, S.; Zheng, J.; Tian, H.; Xu, F. RADAR Echo Recognition of Squall Line Based on Deep Learning. Remote Sens. 2023, 15, 4726. https://doi.org/10.3390/rs15194726
Xie P, Hu Z, Yuan S, Zheng J, Tian H, Xu F. RADAR Echo Recognition of Squall Line Based on Deep Learning. Remote Sensing. 2023; 15(19):4726. https://doi.org/10.3390/rs15194726
Chicago/Turabian StyleXie, Peilong, Zhiqun Hu, Shujie Yuan, Jiafeng Zheng, Hanyuan Tian, and Fen Xu. 2023. "RADAR Echo Recognition of Squall Line Based on Deep Learning" Remote Sensing 15, no. 19: 4726. https://doi.org/10.3390/rs15194726
APA StyleXie, P., Hu, Z., Yuan, S., Zheng, J., Tian, H., & Xu, F. (2023). RADAR Echo Recognition of Squall Line Based on Deep Learning. Remote Sensing, 15(19), 4726. https://doi.org/10.3390/rs15194726