4.2. Comparative Analysis of Proposed Algorithm with Machine Learning Algorithms and MOD35
Figure 8,
Figure 9 and
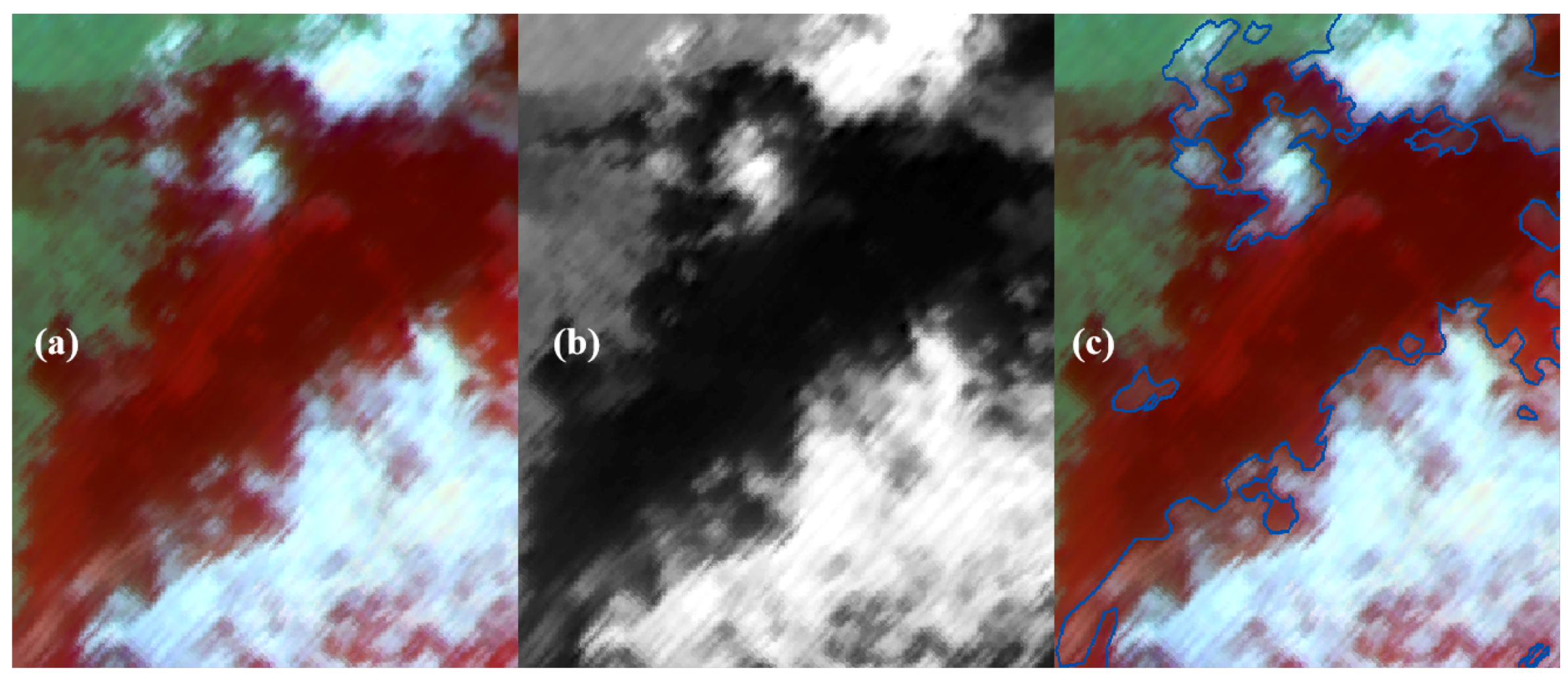
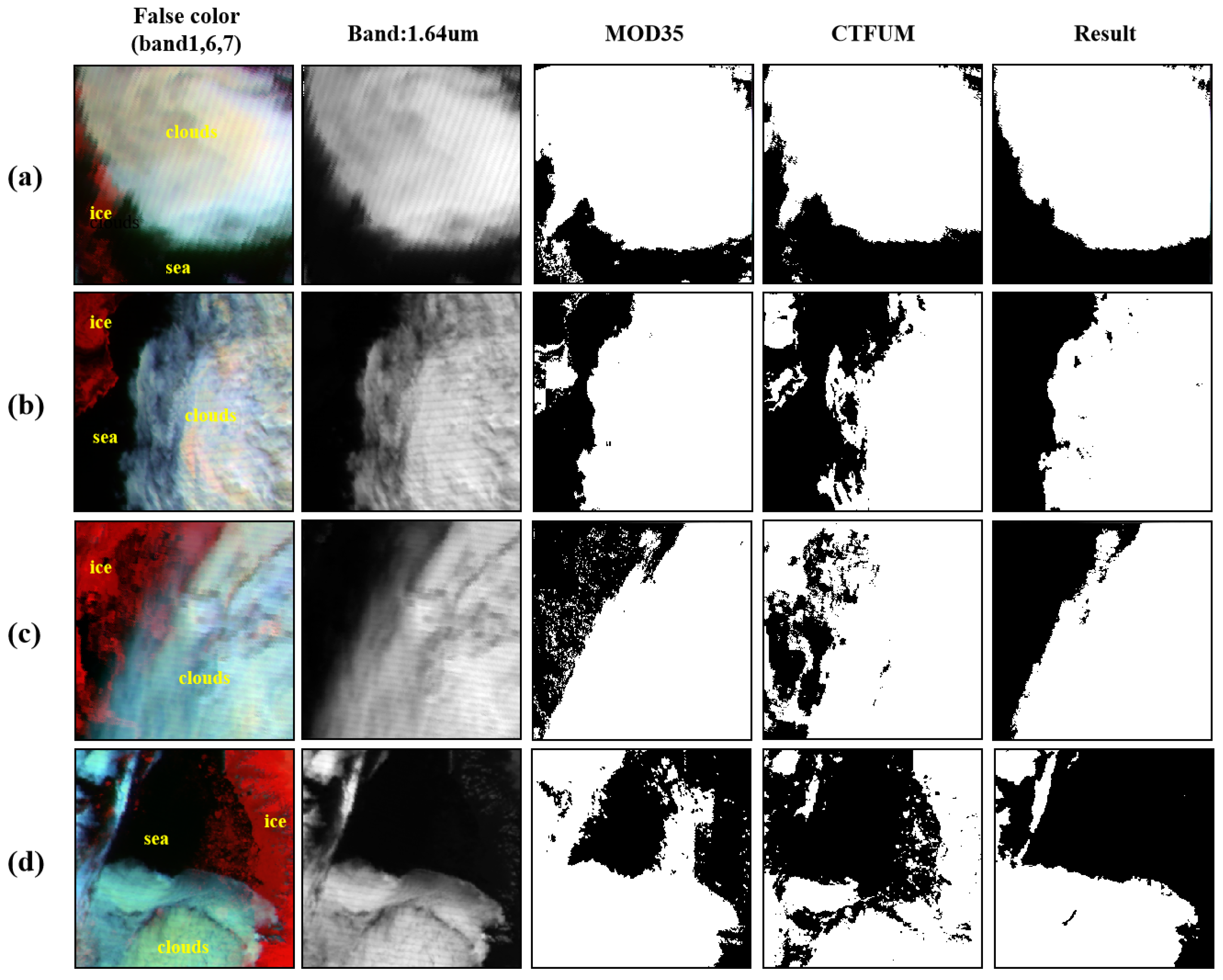
Figure 10 showcase the comparative analysis between the cloud results of the proposed algorithm in this paper with CTFUM and the cloud mask products provided by MODIS, encompassing various cloud types across distinct regions. The first column of the figures displays the pseudo-color composite image of the MERSI-II 1.6.7 band (representing 0.47
m, 1.64
m, and 2.13
m), while the second column exhibits the 1.64
m single-channel image, which is specifically responsive to clouds and utilized for aiding cloud identification purposes. The third column illustrates the MODIS cloud product MOD35, while the fourth column portrays the cloud detection results of CTFUM. The last column shows the cloud product generated through the cloud detection algorithm proposed within this paper.
Figure 8 shows the comparison of the proposed cloud detection algorithm with CTFUM and MOD35, specifically in their ability to differentiate between fractured polar sea ice and clouds. It is evident from the figure that MOD35 and CTFUM frequently confuse sea ice with clouds, erroneously identifying fragmented sea ice within seawater as cloud pixels. The elevated cloud content
of MOD35, relative to the authentic cloud content
, further signifies the incorrect identification of fractured sea ice by MOD35. Importantly, in
Figure 8c, both MOD35 and the outcomes of this paper (even though MOD35 incorrectly identifies some sea ice) indicate underestimated cloud extents, with both algorithms being unsuccessful in accurately detecting exceedingly thin clouds at the cloud peripheries. Overall, the outcomes of this paper surpass those of MOD35 and CTFUM concerning
,
,
, and
F1 score. This is primarily evident in the superior accuracy of identifying fractured sea ice and clouds within the outcomes of this paper while successfully avoiding the misidentification of sea ice as clouds. Specifically in
Figure 8d, the
,
and
F1 of MOD35 are 84.94%, 75.63%, and 86.05%, respectively, and those of CTFUM are 84.10%, 78.73%, and 84.44%, whereas the outcomes of this paper display remarkable enhancement over MOD35 and CTFUM in these three metrics, achieving 98.94%, 97.57%, and 98.73%, respectively.
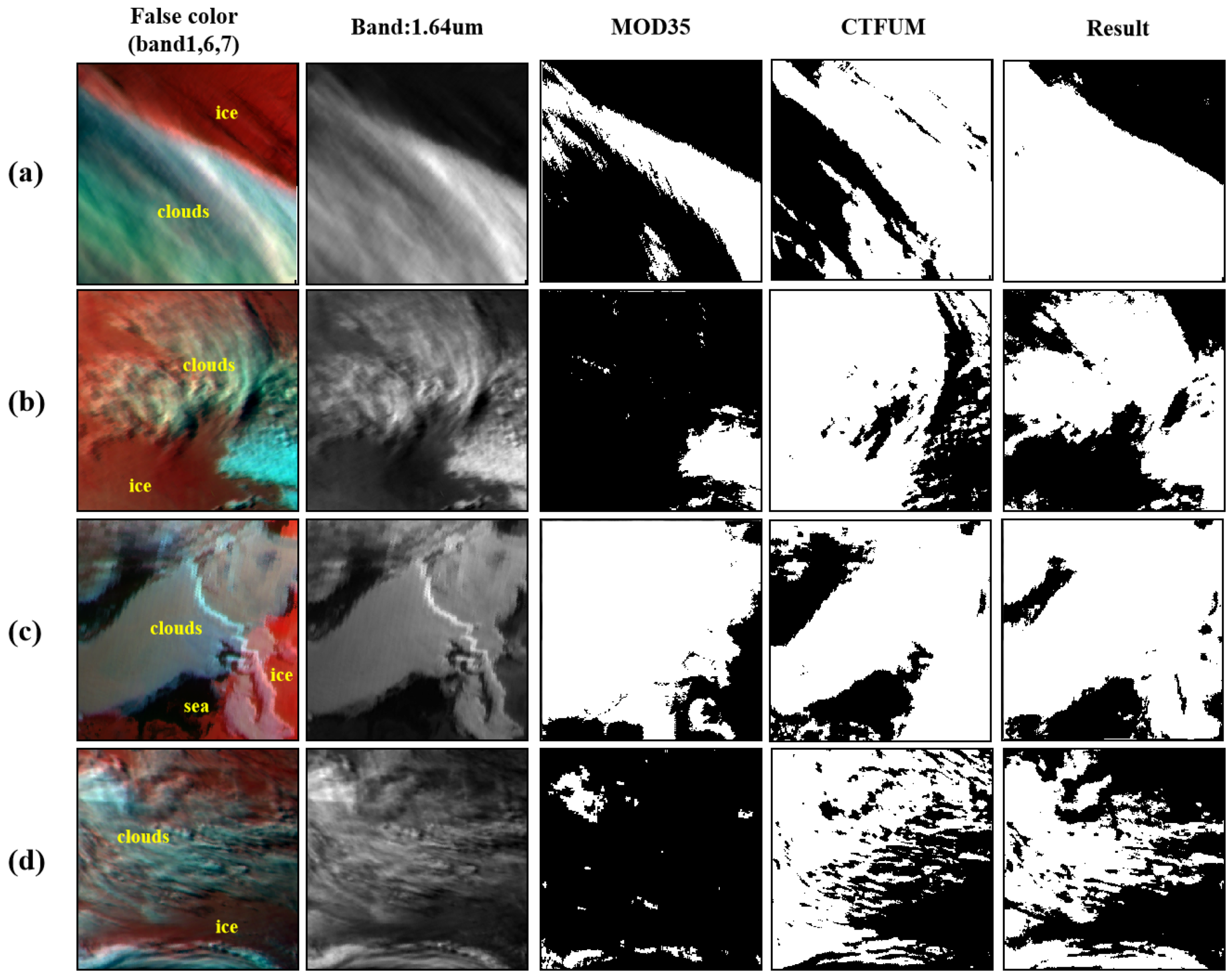
Figure 9 illustrates the outcomes of the proposed cloud detection algorithm, CTFUM, and MOD35 in their capability to identify polar thick clouds.
Figure 9a,b,d provide intuitive evidence that the MOD35 cloud product notably overlooks the identification of thick clouds in the atmosphere above polar ice and snow surfaces. These instances yield
values of merely 43.07%, 16.1%, and 6.65%, along with
values of 62.41%, 48.07%, and 27.41%, correspondingly. CTFUM misidentifies a large amount of snow and ice as clouds, and the ability to identify cloud edges is not strong. The cloud detection algorithm advocated in this paper adeptly discerns the majority of thick clouds situated above polar ice and snow, attaining a
surpassing 97% while consistently upholding an
exceeding 95%. Furthermore, the outcome depicted in
Figure 9c indicates that when thick clouds emerge above polar seawater MOD35 inaccurately identifies the seawater as clouds, which also occurs in UFTUM, consequently overestimating cloud presence. Nonetheless, the algorithm put forward in this paper rectifies MOD35’s and UFTUM’s misidentification, effectively achieving precise differentiation between seawater and clouds.
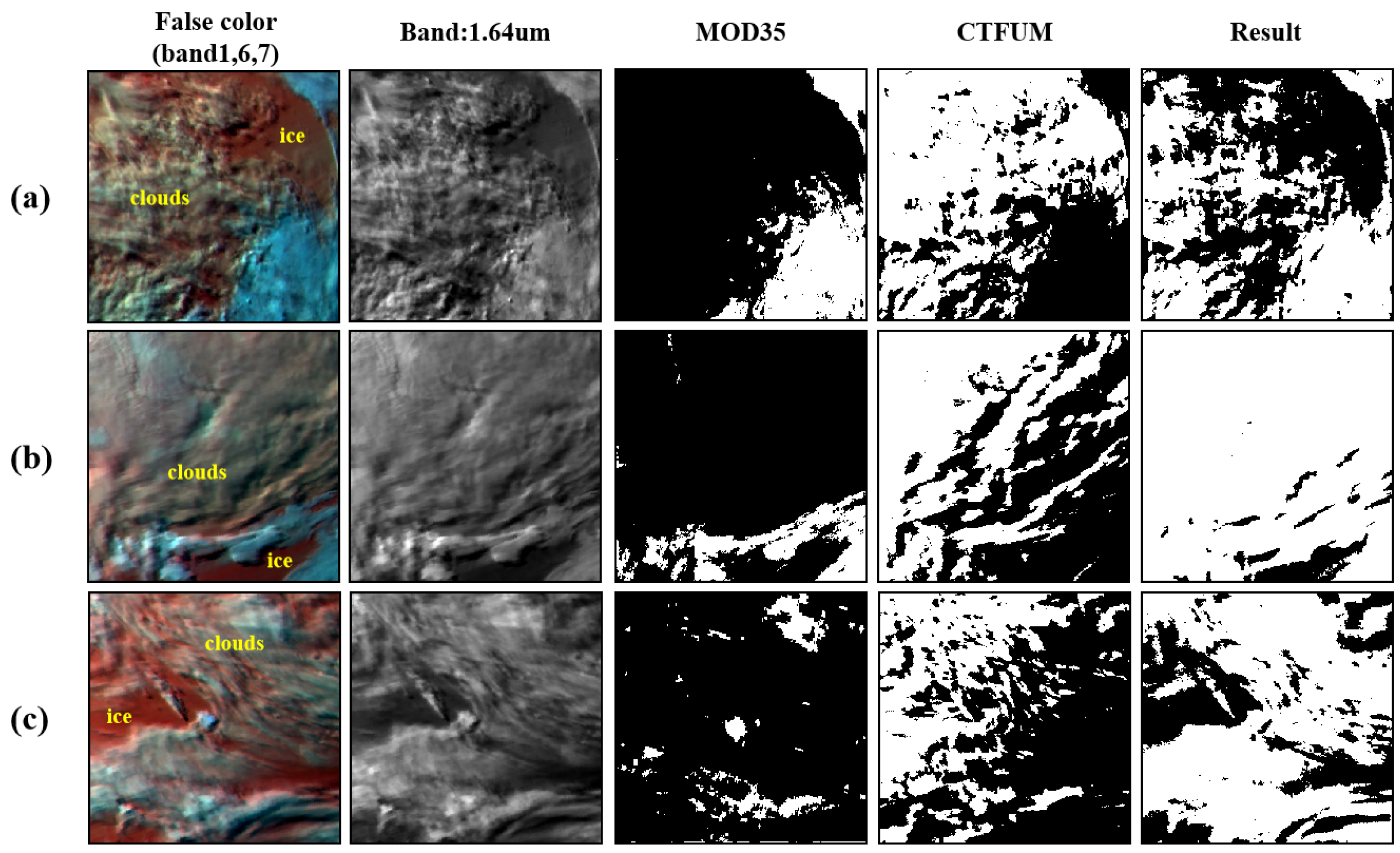
Figure 10 displays the outcomes of the proposed cloud detection algorithm, CTFUM, and MOD35 in identifying polar thin and fragmented clouds. Among them,
Figure 10a,c reveal that in identifying fragmented clouds within the polar ice and snow-covered region MOD35 exhibits limited detection capability and notable omissions, yielding
,
, and
F1 score values all falling below 40%. The detection effect of CTFUM is stronger than that of MOD35, but a large number of cloud pixels are also missed.
The algorithm advocated in this paper ameliorates the issue of overlooked fragmented cloud detection on the polar ice and snow surfaces, stabilizing the three metrics
,
, and
F1 score at values exceeding 92%, signifying a positive recognition outcome for fragmented clouds. In
Figure 10b, thin clouds stretch across three-quarters of the image over the polar ice and snow, yet MOD35 struggled to effectively discern these faint clouds, managing to identify only the more conspicuous clouds below. This led to
,
, and
F1 score values of merely 23.68, 13.12, and 23.16, respectively, reflecting a notably low level of performance. In contrast, the algorithm proposed in this paper nearly precisely identifies the faint clouds within the image, while the corresponding metrics also sustain a high level of performance. As evident from
Table 6, the
of both MOD35 and the proposed cloud detection product from this paper consistently remains above 95%. This signifies that both cloud products showcase a notable degree of precision in detecting cloud pixels. Furthermore, it suggests that the model maintains a diminished false positive rate while predicting positive samples, demonstrating a cautious and confident approach in classifying samples as the positive class.
In the realm of cloud detection within polar regions, MOD35 and CTFUM exhibit limitations in discerning clouds from sea ice, as well as from open water. In instances where both clouds and fragmented sea ice coexist within the region, MOD35 incorrectly designates the fragmented sea ice atop the sea surface as clouds. This phenomenon is more severe with CTFUM, which identifies not only broken sea ice as clouds but also large ice sheets as clouds. When an extensive quantity of dense clouds emerges along the boundary between the ice cover and the ocean, MOD35 incorrectly classifies certain portions of seawater as clouds. The algorithm introduced in this paper adeptly rectifies the identification errors of MOD35 in these scenarios, achieving a heightened accuracy in distinguishing clouds from sea ice, as well as from seawater. Additionally, the algorithm presented in this paper also tackles the challenge of extensive overlooked detection by MOD35 when identifying fragmented clouds and thin clouds.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}