

Rooftop PV Segmenter: A Size-Aware Network for Segmenting Rooftop Photovoltaic Systems from High-Resolution Imagery

 ,
,
Abstract
:1. Introduction
- (1)
- Considering the small-scale and varying sizes of rooftop PV systems, a Semantic Refinement Module (SRM) and a Feature Aggregation Module (FAM) were introduced into the RPS network. SRM was designed to sense size variations of PV panels and reconstruct high-resolution deep semantic features by employing joint upsampling, depth-separable feature pyramids, and dual-attention optimization. FAM enhanced the representation of robust features of rooftop PV panels by continuously aggregating deeper features into shallower ones.
- (2)
- In the output stage, a Deep Supervised Fusion Module (DSFM) was incorporated to constrain and fuse the outputs at different scales to achieve more refined segmentation. For the highly unbalanced distribution of PV data in the rooftop PV dataset, a combined loss function with more attention to the foreground was applied for model training.
- (3)
- The effectiveness of the RPS network was verified by testing on two datasets: the publicly available California Distributed Solar PV Array Dataset (C-DSPV Dataset) Dataset and the Heilbronn Rooftop PV System Dataset (H-RPVS Dataset), with the latter dataset as another contribution of this study.
2. Materials and Methods
2.1. Datasets
2.1.1. California Distributed Solar PV Array Dataset
2.1.2. Heilbronn Rooftop PV System Dataset
2.2. Rooftop PV Segmenter
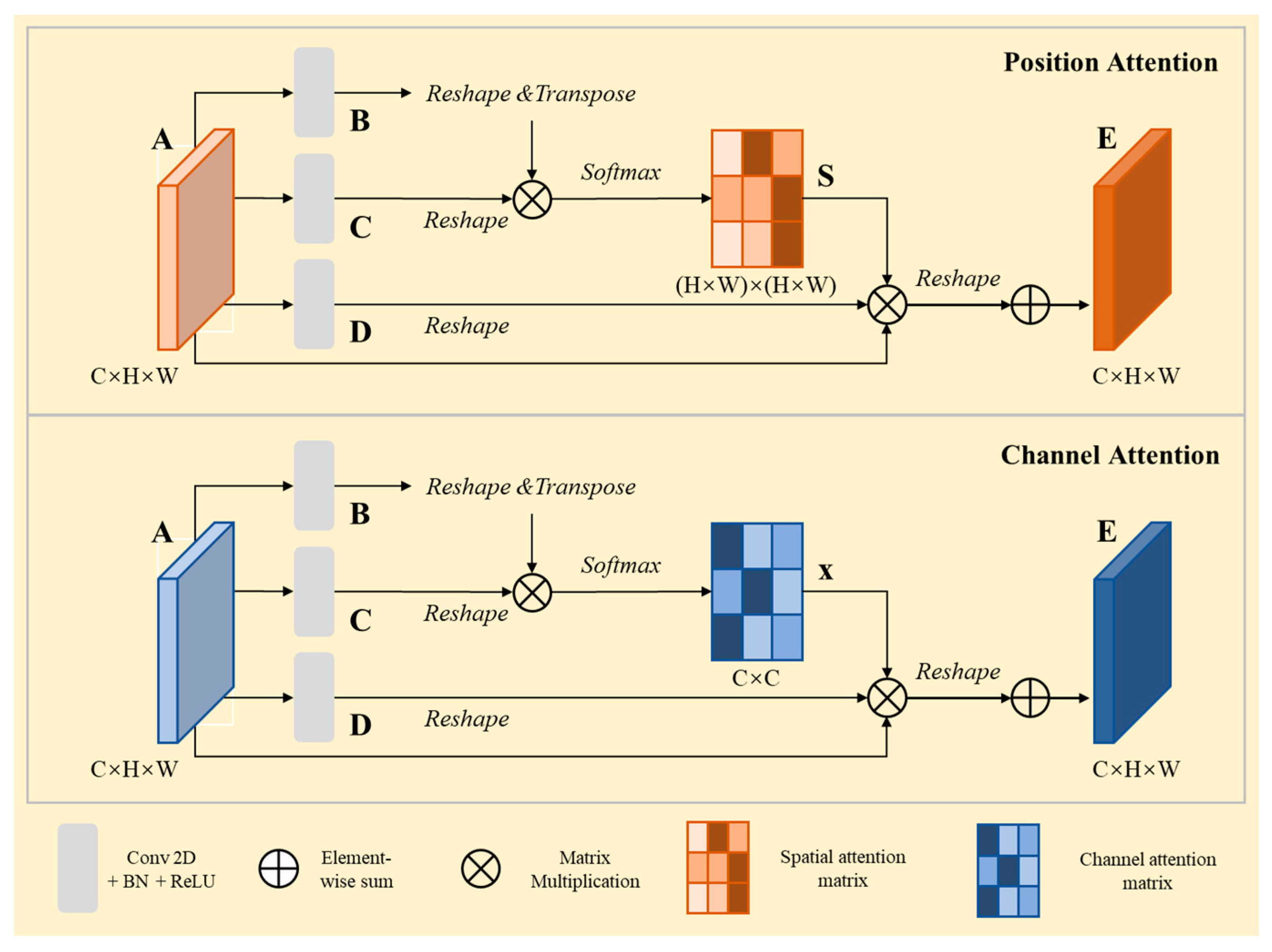
2.2.1. Semantic Refinement Module
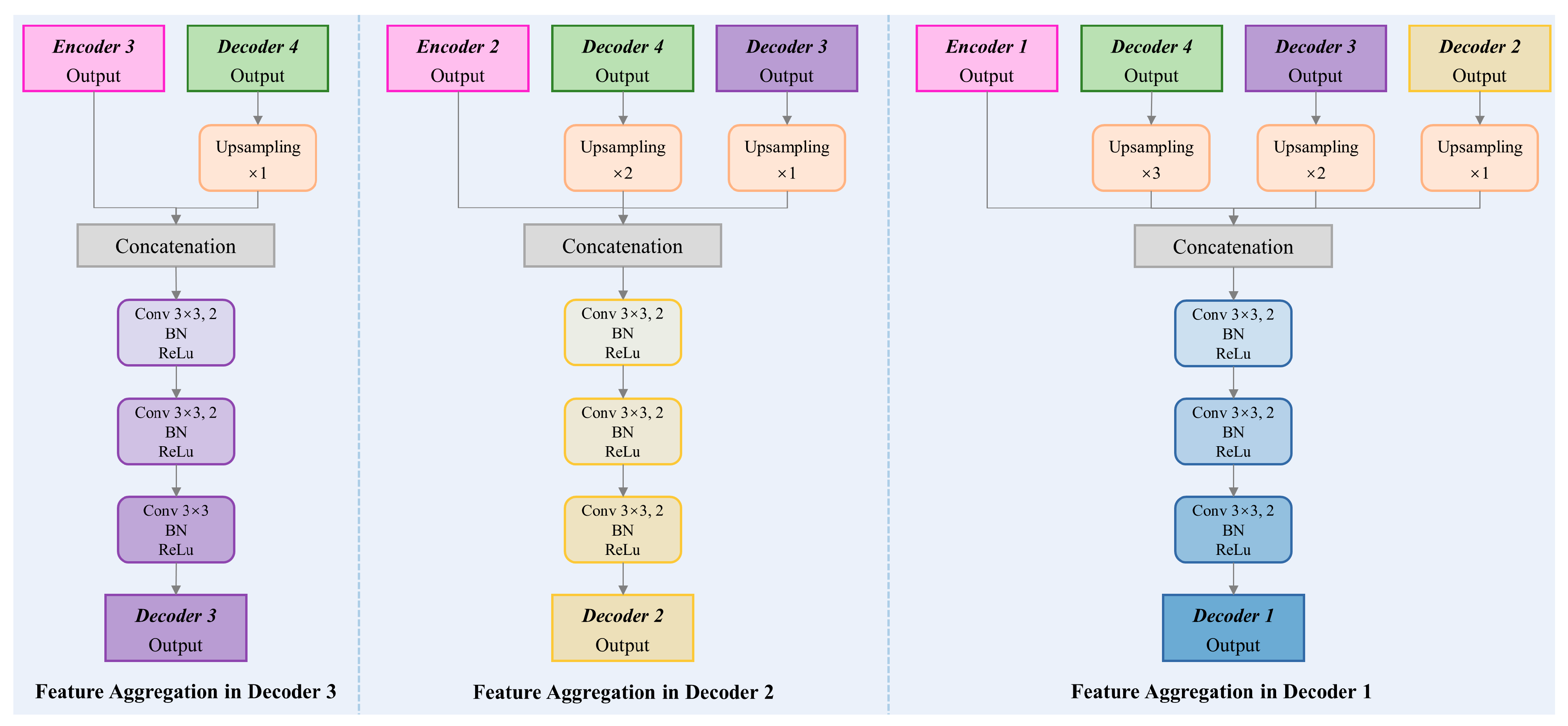
2.2.2. Feature Aggregation Module
2.2.3. Loss Function
3. Experiments and Results
3.1. Experimental Strategy
3.1.1. Dataset Split
3.1.2. Parameter Settings
3.1.3. Comparison Models
3.1.4. Evaluation Metrics
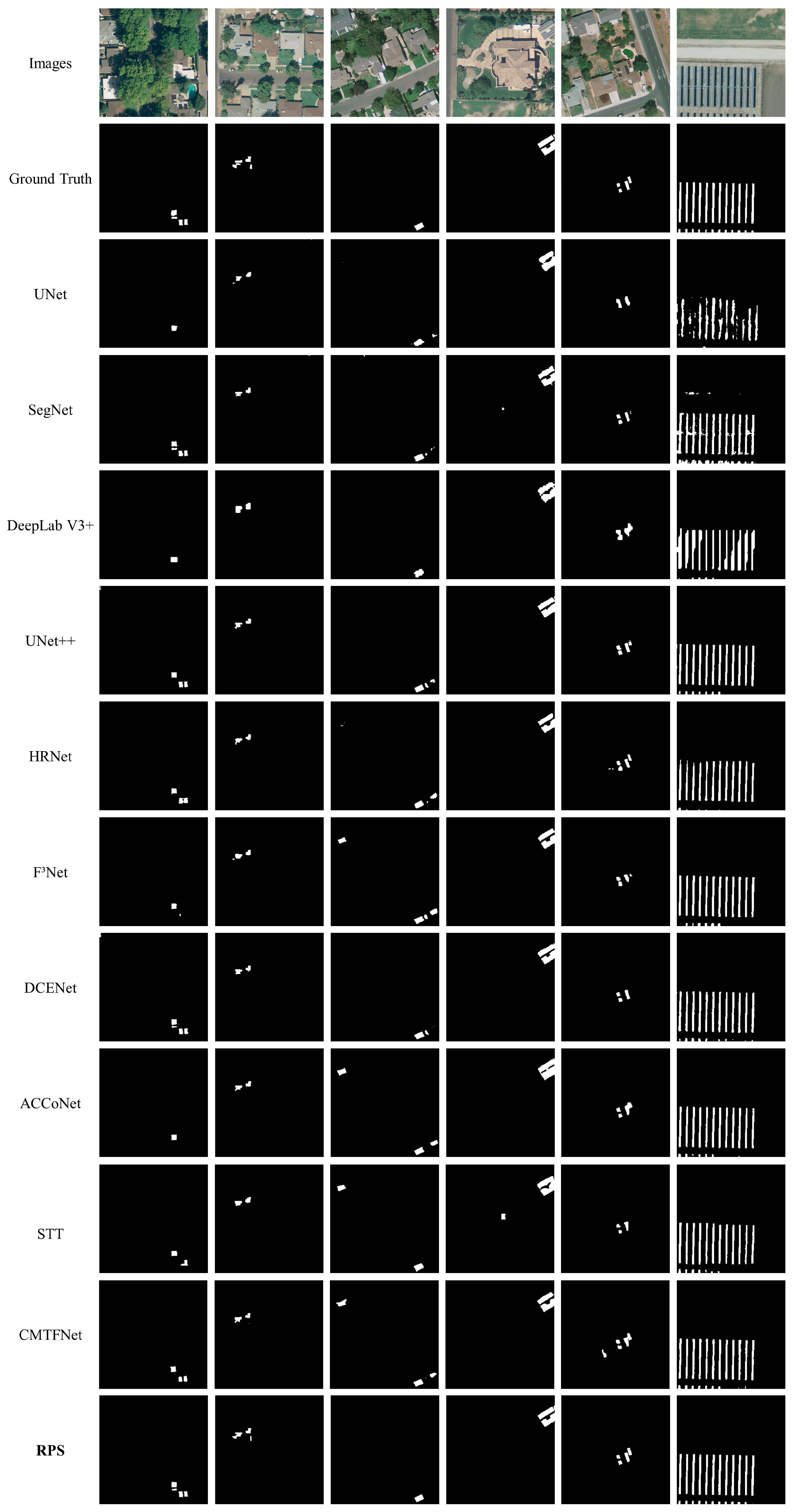
3.2. Experiments on C-DSPV Dataset
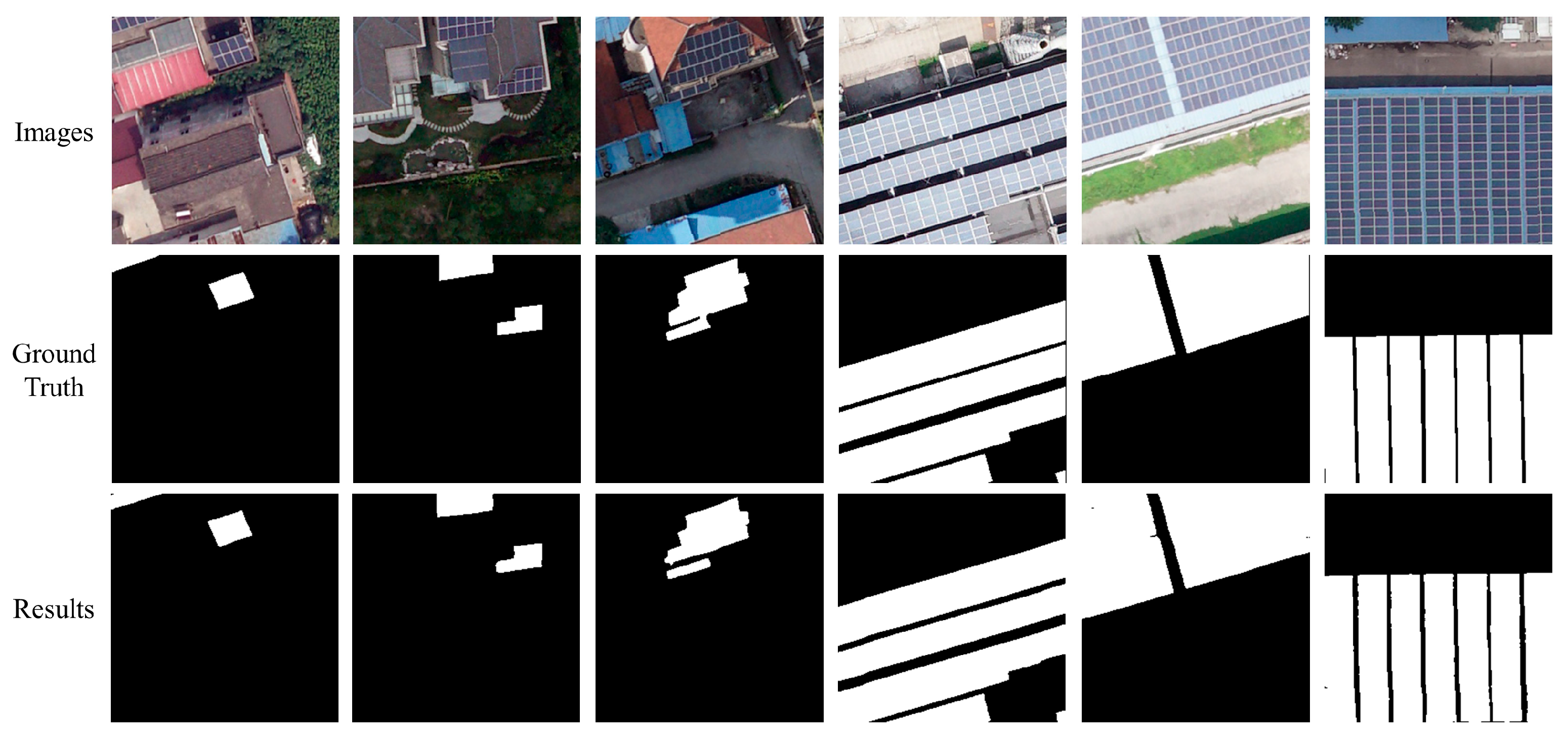
3.3. Experiments on H-RPVS Dataset
4. Analysis and Discussion
4.1. Ablation Analysis
4.2. Generalization Capability
4.3. Extension Applications
4.4. Uncertainty and Outlook
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
Nomenclature
| PV | Photovoltaic |
| RPS | Rooftop PV Segmenter |
| DL | Deep Learning |
| CNNs | Convolutional Neural Networks |
| SRM | Semantic Refinement Module |
| FAM | Feature Aggregation Module |
| DSFM | Deep Supervised Fusion Module |
| C-DSPV | California Distributed Solar PV Array |
| H-RPVS | Heilbronn Rooftop PV System |
| BN | Batch Normalization |
| GPU | Graphics Processing Unit |
| BCE | Binary Cross Entropy |
| IoU | Intersection over Union |
| SSIM | Structural Similarity |
| JU | Joint Upsampling |
| S-A | SRM with Attention |
| S-NA | SRM without Attention |
| CAM | Class Activation Mapping |
| DSPR | Deep Solar PV Refiner |
| OSM | OpenStreetMap |
References
- Olabi, A.; Abdelkareem, M.A. Renewable energy and climate change. Renew. Sustain. Energy Rev. 2022, 158, 112111. [Google Scholar] [CrossRef]
- Zakari, A.; Khan, I.; Tan, D.; Alvarado, R.; Dagar, V. Energy efficiency and sustainable development goals (SDGs). Energy 2022, 239, 122365. [Google Scholar] [CrossRef]
- Hepburn, C.; Qi, Y.; Stern, N.; Ward, B.; Xie, C.; Zenghelis, D. Towards carbon neutrality and China’s 14th Five-Year Plan: Clean energy transition, sustainable urban development, and investment priorities. Environ. Sci. Ecotechnol. 2021, 8, 100130. [Google Scholar] [CrossRef] [PubMed]
- Talayero, A.P.; Melero, J.J.; Llombart, A.; Yürüşen, N.Y. Machine Learning models for the estimation of the production of large utility-scale photovoltaic plants. Sol. Energy 2023, 254, 88–101. [Google Scholar] [CrossRef]
- Libra, M.; Daneček, M.; Lešetický, J.; Poulek, V.; Sedláček, J.; Beránek, V. Monitoring of defects of a photovoltaic power plant using a drone. Energies 2019, 12, 795. [Google Scholar] [CrossRef]
- Jayasooriya, V.; Fernando, S.; Silva, C.; Muthukumaran, S. Comparative analysis on the effectiveness of green roofs and photovoltaic panels as sustainable rooftop technologies. Environ. Sci. Pollut. Res. 2023, 30, 98977–98992. [Google Scholar] [CrossRef]
- Gassar, A.A.A.; Cha, S.H. Review of geographic information systems-based rooftop solar photovoltaic potential estimation approaches at urban scales. Appl. Energy 2021, 291, 116817. [Google Scholar] [CrossRef]
- Ren, S.; Hu, W.; Bradbury, K.; Harrison-Atlas, D.; Valeri, L.M.; Murray, B.; Malof, J.M. Automated extraction of energy systems information from remotely sensed data: A review and analysis. Appl. Energy 2022, 326, 119876. [Google Scholar] [CrossRef]
- Oh, M.; Kim, C.K.; Kim, B.; Kang, Y.; Kim, H.G. Real-Time Terrain Correction of Satellite Imagery-Based Solar Irradiance Maps Using Precomputed Data and Memory Optimization. Remote Sens. 2023, 15, 3965. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, H.; Tian, S. Phenology-assisted supervised paddy rice mapping with the Landsat imagery on Google Earth Engine: Experiments in Heilongjiang Province of China from 1990 to 2020. Comput. Electron. Agric. 2023, 212, 108105. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L. Artificial intelligence for remote sensing data analysis: A review of challenges and opportunities. IEEE Geosci. Remote Sens. Mag. 2022, 10, 270–294. [Google Scholar] [CrossRef]
- Jiang, W.; Tian, B.; Duan, Y.; Chen, C.; Hu, Y. Rapid mapping and spatial analysis on the distribution of photovoltaic power stations with Sentinel-1&2 images in Chinese coastal provinces. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103280. [Google Scholar] [CrossRef]
- Wang, J.; Chen, X.; Jiang, W.; Hua, L.; Liu, J.; Sui, H. PVNet: A novel semantic segmentation model for extracting high-quality photovoltaic panels in large-scale systems from high-resolution remote sensing imagery. Int. J. Appl. Earth Obs. Geoinf. 2023, 119, 103309. [Google Scholar] [CrossRef]
- Xia, Z.; Li, Y.; Guo, X.; Chen, R.J. High-resolution mapping of water photovoltaic development in China through satellite imagery. Int. J. Appl. Earth Obs. Geoinf. 2022, 107, 102707. [Google Scholar] [CrossRef]
- Mayer, K.; Rausch, B.; Arlt, M.-L.; Gust, G.; Wang, Z.; Neumann, D.; Rajagopal, R. 3D-PV-Locator: Large-scale detection of rooftop-mounted photovoltaic systems in 3D. Appl. Energy 2022, 310, 118469. [Google Scholar] [CrossRef]
- Ren, S.; Malof, J.; Fetter, R.; Beach, R.; Rineer, J.; Bradbury, K. Utilizing Geospatial Data for Assessing Energy Security: Mapping Small Solar Home Systems Using Unmanned Aerial Vehicles and Deep Learning. ISPRS Int. J. Geo-Inf. 2022, 11, 222. [Google Scholar] [CrossRef]
- Tan, H.; Guo, Z.; Zhang, H.; Chen, Q.; Lin, Z.; Chen, Y.; Yan, J. Enhancing PV panel segmentation in remote sensing images with constraint refinement modules. Appl. Energy 2023, 350, 121757. [Google Scholar] [CrossRef]
- Malof, J.M.; Bradbury, K.; Collins, L.M.; Newell, R.G.; Serrano, A.; Wu, H.; Keene, S. Image features for pixel-wise detection of solar photovoltaic arrays in aerial imagery using a random forest classifier. In Proceedings of the IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016; pp. 799–803. [Google Scholar] [CrossRef]
- Malof, J.M.; Bradbury, K.; Collins, L.M.; Newell, R.G. Automatic detection of solar photovoltaic arrays in high resolution aerial imagery. Appl. Energy 2016, 183, 229–240. [Google Scholar] [CrossRef]
- Wang, M.; Cui, Q.; Sun, Y.; Wang, Q.; Sensing, R. Photovoltaic panel extraction from very high-resolution aerial imagery using region–line primitive association analysis and template matching. ISPRS-J. Photogramm. Remote Sens. 2018, 141, 100–111. [Google Scholar] [CrossRef]
- Li, Z.; Liu, F.; Yang, W.; Peng, S.; Zhou, J. A survey of convolutional neural networks: Analysis, applications, and prospects. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 6999–7019. [Google Scholar] [CrossRef]
- Strudel, R.; Garcia, R.; Laptev, I.; Schmid, C. Segmenter: Transformer for semantic segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Virtual, 11–17 October 2021; pp. 7262–7272. [Google Scholar] [CrossRef]
- Minaee, S.; Boykov, Y.; Porikli, F.; Plaza, A.; Kehtarnavaz, N.; Terzopoulos, D. Image segmentation using deep learning: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 3523–3542. [Google Scholar] [CrossRef] [PubMed]
- Kotaridis, I.; Lazaridou, M. Remote sensing image segmentation advances: A meta-analysis. ISPRS-J. Photogramm. Remote Sens. 2021, 173, 309–322. [Google Scholar] [CrossRef]
- Chen, Q.; Li, X.; Zhang, Z.; Zhou, C.; Guo, Z.; Liu, Z.; Zhang, H. Remote sensing of photovoltaic scenarios: Techniques, applications and future directions. Appl. Energy 2023, 333, 120579. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. Int. Conf. Med. Image Comput. Comput.-Assist. Interv. 2015, 3, 234–241. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Chen, L.-C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Xie, E.; Wang, W.; Yu, Z.; Anandkumar, A.; Alvarez, J.M.; Luo, P. SegFormer: Simple and efficient design for semantic segmentation with transformers. Adv. Neural Inf. Process. Syst. 2021, 34, 12077–12090. [Google Scholar]
- Zhuang, L.; Zhang, Z.; Wang, L. The automatic segmentation of residential solar panels based on satellite images: A cross learning driven U-Net method. Appl. Soft. Comput. 2020, 92, 106283. [Google Scholar] [CrossRef]
- Yu, J.; Wang, Z.; Majumdar, A.; Rajagopal, R. DeepSolar: A machine learning framework to efficiently construct a solar deployment database in the United States. Joule 2018, 2, 2605–2617. [Google Scholar] [CrossRef]
- Zhu, R.; Guo, D.; Wong, M.S.; Qian, Z.; Chen, M.; Yang, B.; Chen, B.; Zhang, H.; You, L.; Heo, J. Deep solar PV refiner: A detail-oriented deep learning network for refined segmentation of photovoltaic areas from satellite imagery. Int. J. Appl. Earth Obs. Geoinf. 2023, 116, 103134. [Google Scholar] [CrossRef]
- Li, P.; Zhang, H.; Guo, Z.; Lyu, S.; Chen, J.; Li, W.; Song, X.; Shibasaki, R.; Yan, J. Understanding rooftop PV panel semantic segmentation of satellite and aerial images for better using machine learning. Adv. Appl. Energy 2021, 4, 100057. [Google Scholar] [CrossRef]
- Bradbury, K.; Saboo, R.; Johnson, T.L.; Malof, J.M.; Devarajan, A.; Zhang, W.; Collins, L.M.; Newell, R.G. Distributed solar photovoltaic array location and extent dataset for remote sensing object identification. Sci. Data 2016, 3, 160106. [Google Scholar] [CrossRef] [PubMed]
- Jiang, H.; Yao, L.; Lu, N.; Qin, J.; Liu, T.; Liu, Y.; Zhou, C. Multi-resolution dataset for photovoltaic panel segmentation from satellite and aerial imagery. Earth Syst. Sci. Data 2021, 13, 5389–5401. [Google Scholar] [CrossRef]
- Kasmi, G.; Saint-Drenan, Y.-M.; Trebosc, D.; Jolivet, R.; Leloux, J.; Sarr, B.; Dubus, L. A crowdsourced dataset of aerial images with annotated solar photovoltaic arrays and installation metadata. Sci. Data 2023, 10, 59. [Google Scholar] [CrossRef] [PubMed]
- Stowell, D.; Kelly, J.; Tanner, D.; Taylor, J.; Jones, E.; Geddes, J.; Chalstrey, E. A harmonised, high-coverage, open dataset of solar photovoltaic installations in the UK. Sci. Data 2020, 7, 394. [Google Scholar] [CrossRef] [PubMed]
- Kruitwagen, L.; Story, K.; Friedrich, J.; Byers, L.; Skillman, S.; Hepburn, C. A global inventory of photovoltaic solar energy generating units. Nature 2021, 598, 604–610. [Google Scholar] [CrossRef]
- Ortiz, A.; Negandhi, D.; Mysorekar, S.R.; Nagaraju, S.K.; Kiesecker, J.; Robinson, C.; Bhatia, P.; Khurana, A.; Wang, J.; Oviedo, F. An artificial intelligence dataset for solar energy locations in India. Sci. Data 2022, 9, 497. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, M.; Wang, S.; Huang, Y.; Xie, Z. Mapping photovoltaic power plants in China using Landsat, random forest, and Google Earth Engine. Earth Syst. Sci. Data 2022, 14, 3743–3755. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Wu, H.; Zhang, J.; Huang, K.; Liang, K.; Yu, Y. Fastfcn: Rethinking dilated convolution in the backbone for semantic segmentation. arXiv 2019, arXiv:1903.11816. [Google Scholar] [CrossRef]
- Fu, J.; Liu, J.; Tian, H.; Li, Y.; Bao, Y.; Fang, Z.; Lu, H. Dual attention network for scene segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 3146–3154. [Google Scholar] [CrossRef]
- Zhou, W.; Jin, J.; Lei, J.; Yu, L. CIMFNet: Cross-layer interaction and multiscale fusion network for semantic segmentation of high-resolution remote sensing images. IEEE J. Sel. Top. Signal Process. 2022, 16, 666–676. [Google Scholar] [CrossRef]
- Wei, J.; Wang, S.; Huang, Q. F3Net: Fusion, feedback and focus for salient object detection. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; pp. 12321–12328. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]
- Zhou, Z.; Rahman Siddiquee, M.M.; Tajbakhsh, N.; Liang, J. Unet++ A nested u-net architecture for medical image segmentation. In Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support, Proceedings of the 4th International Workshop, DLMIA 2018, and 8th International Workshop, ML-CDS 2018, Held in Conjunction with MICCAI 2018, Granada, Spain, 20 September 2018; Springer: Cham, Switzerland, 2018; pp. 3–11. [Google Scholar] [CrossRef]
- Wang, J.; Sun, K.; Cheng, T.; Jiang, B.; Deng, C.; Zhao, Y.; Liu, D.; Mu, Y.; Tan, M.; Wang, X.; et al. Deep high-resolution representation learning for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 3349–3364. [Google Scholar] [CrossRef] [PubMed]
- Mei, H.; Liu, Y.; Wei, Z.; Zhou, D.; Wei, X.; Zhang, Q.; Yang, X. Exploring dense context for salient object detection. IEEE Trans. Circuits Syst. Video Technol. 2021, 32, 1378–1389. [Google Scholar] [CrossRef]
- Li, G.; Liu, Z.; Zeng, D.; Lin, W.; Ling, H.J. Adjacent context coordination network for salient object detection in optical remote sensing images. IEEE Trans. Cybern. 2022, 53, 526–538. [Google Scholar] [CrossRef]
- Chen, K.; Zou, Z.; Shi, Z. Building extraction from remote sensing images with sparse token transformers. Remote Sens. 2021, 13, 4441. [Google Scholar] [CrossRef]
- Wu, H.; Huang, P.; Zhang, M.; Tang, W.; Yu, X. CMTFNet: CNN and Multiscale Transformer Fusion Network for Remote Sensing Image Semantic Segmentation. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–12. [Google Scholar] [CrossRef]
- Zhou, B.; Khosla, A.; Lapedriza, A.; Oliva, A.; Torralba, A. Learning deep features for discriminative localization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2921–2929. [Google Scholar] [CrossRef]
- Allegrini, J.; Orehounig, K.; Mavromatidis, G.; Ruesch, F.; Dorer, V.; Evins, R. A review of modelling approaches and tools for the simulation of district-scale energy systems. Renew. Sustain. Energ. Rev. 2015, 52, 1391–1404. [Google Scholar] [CrossRef]
- Kirillov, A.; Mintun, E.; Ravi, N.; Mao, H.; Rolland, C.; Gustafson, L.; Xiao, T.; Whitehead, S.; Berg, A.C.; Lo, W.-Y.; et al. Segment anything. arXiv 2023, arXiv:2304.02643. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Input Size | Training Set (60%) | Validation Set (20%) | Test Set (20%) |
|---|---|---|---|---|
| C-DSPV Dataset | 256 × 256 × 3 | 6703 | 2233 | 2233 |
| H-RPVS Dataset | 256 × 256 × 3 | 3518 | 1174 | 1174 |
| Model | Precision | Recall | F1-Score | IoU |
|---|---|---|---|---|
| U-Net | 0.8342 | 0.8314 | 0.8328 | 0.7135 |
| SegNet | 0.8984 | 0.8824 | 0.8903 | 0.8023 |
| DeepLab v3+ | 0.8162 | 0.8901 | 0.8516 | 0.7415 |
| U-Net++ | 0.9118 | 0.9083 | 0.9101 | 0.8350 |
| HRNet | 0.8985 | 0.8813 | 0.8898 | 0.8015 |
| F3Net | 0.9003 | 0.8981 | 0.8992 | 0.8169 |
| DCENet | 0.9077 | 0.8964 | 0.9020 | 0.8215 |
| ACCoNet | 0.9040 | 0.9092 | 0.9066 | 0.8291 |
| STT | 0.8845 | 0.8830 | 0.8838 | 0.7917 |
| CMTFNet | 0.9000 | 0.8952 | 0.8976 | 0.8142 |
| RPS (Our) | 0.9200 | 0.9172 | 0.9186 | 0.8495 |
| Model | Precision | Recall | F1-Score | IoU |
|---|---|---|---|---|
| U-Net | 0.8966 | 0.9028 | 0.8997 | 0.8176 |
| SegNet | 0.9419 | 0.9409 | 0.9414 | 0.8893 |
| DeepLab v3+ | 0.9031 | 0.9386 | 0.9205 | 0.8527 |
| U-Net++ | 0.9566 | 0.9561 | 0.9564 | 0.9164 |
| HRNet | 0.9529 | 0.9516 | 0.9523 | 0.9089 |
| F3Net | 0.9534 | 0.9542 | 0.9538 | 0.9117 |
| DCENet | 0.9532 | 0.9554 | 0.9543 | 0.9126 |
| ACCoNet | 0.9559 | 0.9579 | 0.9569 | 0.9174 |
| STT | 0.9470 | 0.9485 | 0.9477 | 0.9007 |
| CMTFNet | 0.9514 | 0.9529 | 0.9521 | 0.9086 |
| RPS (Our) | 0.9583 | 0.9634 | 0.9608 | 0.9246 |
| JU | S-NA | S-A | FAM | DSFM | Precision | Recall | F1-Score | IoU | |
|---|---|---|---|---|---|---|---|---|---|
| 1 | √ | √ | √ | 0.9193 | 0.9093 | 0.9142 | 0.8420 | ||
| 2 | √ | √ | √ | 0.9292 | 0.9023 | 0.9156 | 0.8443 | ||
| 3 | √ | √ | 0.9102 | 0.9149 | 0.9125 | 0.8391 | |||
| 4 | √ | √ | 0.9144 | 0.9150 | 0.9147 | 0.8429 | |||
| 5 | √ | √ | √ | 0.9200 | 0.9172 | 0.9186 | 0.8495 |
| Precision | Recall | F1-Score | IoU | |
|---|---|---|---|---|
| DSPR | 0.8951 | 0.9477 | 0.9206 | 0.8530 |
| RPS | 0.9534 | 0.9245 | 0.9374 | 0.8833 |
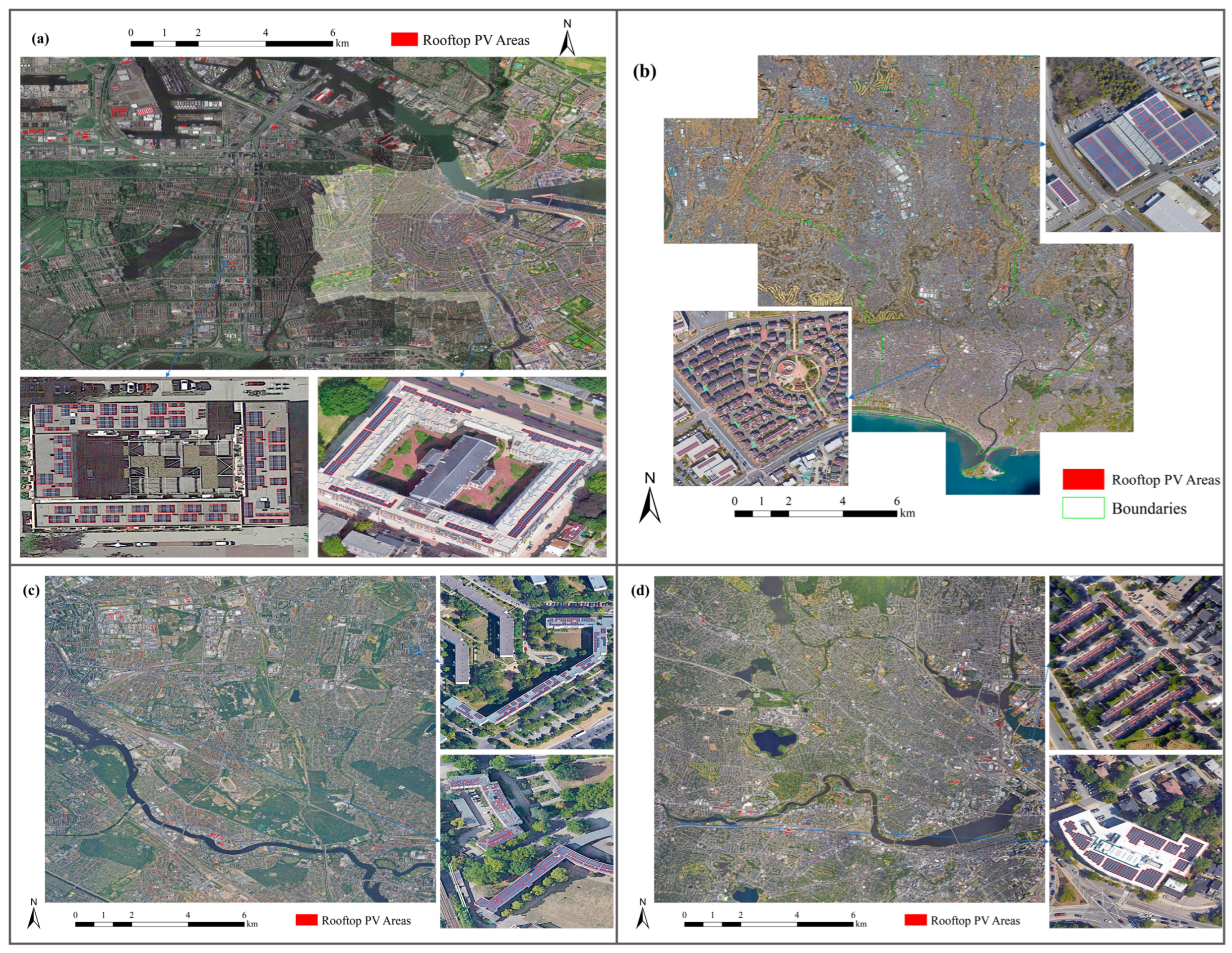
| Region | Quantity/Area of Buildings (km2) | Quantity/Area of PVs (km2) | Average Size of Buildings (m2) | Average Size of PVs (m2) | Proportion of Buildings with PVs | Utilization Rate of Building Roofs |
|---|---|---|---|---|---|---|
| Amsterdam | 138,569/18.8 | 19,454/0.53 | 135 | 27.4 | 6.59% | 2.82% |
| Fujisawa | 117,083/13.1 | 10,688/0.28 | 112 | 25.9 | 6.17% | 2.15% |
| Berlin | 55,035/12.2 | 8855/0.23 | 221 | 25.4 | 5.17% | 1.89% |
| Boston | 109,585/22.4 | 7097/0.29 | 204 | 40.7 | 3.16% | 1.29% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Chen, X.; Shi, W.; Jiang, W.; Zhang, X.; Hua, L.; Liu, J.; Sui, H. Rooftop PV Segmenter: A Size-Aware Network for Segmenting Rooftop Photovoltaic Systems from High-Resolution Imagery. Remote Sens. 2023, 15, 5232. https://doi.org/10.3390/rs15215232
Wang J, Chen X, Shi W, Jiang W, Zhang X, Hua L, Liu J, Sui H. Rooftop PV Segmenter: A Size-Aware Network for Segmenting Rooftop Photovoltaic Systems from High-Resolution Imagery. Remote Sensing. 2023; 15(21):5232. https://doi.org/10.3390/rs15215232
Chicago/Turabian StyleWang, Jianxun, Xin Chen, Weiyue Shi, Weicheng Jiang, Xiaopu Zhang, Li Hua, Junyi Liu, and Haigang Sui. 2023. "Rooftop PV Segmenter: A Size-Aware Network for Segmenting Rooftop Photovoltaic Systems from High-Resolution Imagery" Remote Sensing 15, no. 21: 5232. https://doi.org/10.3390/rs15215232
APA StyleWang, J., Chen, X., Shi, W., Jiang, W., Zhang, X., Hua, L., Liu, J., & Sui, H. (2023). Rooftop PV Segmenter: A Size-Aware Network for Segmenting Rooftop Photovoltaic Systems from High-Resolution Imagery. Remote Sensing, 15(21), 5232. https://doi.org/10.3390/rs15215232