1. Introduction
As an active observation system that images objects by electronic waves, Synthetic Aperture Radar (SAR) uses the synthetic aperture principle and pulse compression technology for radar target detection [
1,
2]. SAR has become the primary technology in the field of electronic countermeasures (ECM) due to its high operational capability and favorable imaging characteristics of high resolution, all-day, and all-weather [
3].
With respect to SAR deceptive jamming technology, by intercepting radar signals and implementing a modulated retransmitted process, it can generate realistic false targets and the corresponding backgrounds in SAR images [
4]. Accordingly, it weakens the imaging results and destroys the image features, which seriously restricts the ability of SAR image interpretation, such as image segmentation, feature extraction, target detection, and recognition [
5,
6].
SAR images have a rich set of classical features such as texture, scale, and shape that describes both the global and local scattering characteristics of targets. From the perspective of SAR image processing and anti-jamming, it is useful to distinguish false targets from real ones using these features. Nevertheless, with the development of the latest jamming technology, it can further generate false targets with higher resolution, finer details, and even similar scattering characteristics compared to real targets. Consequently, the differences between the jamming and real scenes have diminished significantly, the image representation of false targets and real targets evaluated by classical features are similar, and they cannot be accurately discriminated, which invalidates the effectiveness of classical features in false target identification.
Several studies have been conducted on the detection of false targets in SAR images. Feng et al. [
7] used cross-track interferometric SAR to detect false targets. Wang et al. [
8] proposed an anti-deceptive jamming method for multistatic SAR to locate the deceptive jammer and eliminate false targets. Li et al. [
9] detected false targets by multi-angle and multi-time SAR image registration. Zhao et al. [
10] proposed a jamming detection operator in the SAR image domain to detect false targets. Nicholas et al. [
11] introduced a feedback training method for using a Bayesian convolutional neural network, capable of discriminating between real and false targets in SAR target detection. Although these methods have achieved varying degrees of effectiveness, there has been a neglect of the nature of the target backscattering characteristics and insufficient extraction of the distinctive features of real and false targets.
In view of the above-mentioned facts, it is urgent to explore deeper and more sophisticated features for false target detection. According to the principle of SAR imaging, a real target at a certain height on the ground will prevent the SAR from receiving echoes from certain regions, generating a shadow around the real target [
12]. Jamming signals only contribute to additive noise and may not have the geographical conditions to produce shadows, nor can it generate shadows by adjusting the amplitude around the jamming area [
13], which means that shadows have promising potential in identifying false targets. As an intrinsic feature that reflects the target geometry, a shadow provides a robust image representation of the observed target [
14]. For example, Gao et al. [
15] detect shadow regions using a dual-threshold Otsu method, which allows fast localization of incomplete targets. Papson et al. [
16] use a hidden Markov model to detect shadow contours and classify targets. Choi et al. [
12] propose a parallel region feature network to efficiently detect shadows. Zhang et al. [
17] use a multi-resolution dense encoder and decoder network to automatically extract shadows. Despite a large number of previous results [
18,
19,
20,
21], the use of shadows for false target recognition tasks has not been investigated.
In summary, this paper focuses on detecting false targets in SAR images and proposes a false target identification method based on shadows. On one hand, a shadow extraction method based on a change detection technique is proposed, in which an image transformation and a histogram-based threshold selection strategy is involved, enabling the fast extraction of shadow regions. On the other hand, a shadow-based false target detection method is introduced. It uses a three-stage differentiation condition to robustly identify false targets by fully considering the geometric relationship (i.e., direction, position, and width) between targets and shadows.
Compared with the traditional methods, our proposed method adopts the image inversion methodology and change detection operator to accurately extract shadow regions, which can overcome the problem of loss of spatial information and distinguish the weak scattering pixels from shadows. More importantly, the traditional methods identify the false targets only based on the existence of shadows. Meanwhile in our work, a three-stage differentiation condition is proposed by adequately considering the geometric relationship; thus, the identification of false targets is more accurate and effective.
The main contributions of this paper can be summarized as follows:
By means of the methodology of change detection, a difference image is generated by image translation manipulation to efficiently and effectively extract the shadow region in the SAR image. The involved generation does not require the slaved image, which enhances its applicability and flexibility.
In the process of identifying false targets, a hierarchical discrimination technique is proposed for detecting false targets. This technique shows better sensitivity than classical features, even the slight image disturbance, making it more effective in eliminating background noise and highlighting the potential target within the scene.
This work adequately investigates the distribution of classical features on the real and false targets, and further comparative analysis verifies the effectiveness of shadows in terms of false target discrimination. In addition, the feasibility of incorporating shadows into SAR image interpretation and ECM is demonstrated.
2. Shadow Extraction
Before extracting the shadow, it is necessary to slice the regions of interest (ROI) so that the outer contours and inner pixels of the targets and jamming can be displayed. Since the sliced SAR image also contains a small amount of natural clutter in addition to the target and jamming, the extraction of shadows in regions is closely related to the position, direction, and shape of the target and clutter.
Generally, the Otsu or CFAR method [
22,
23] is widely used to detect SAR shadow regions. However, the shadows of targets are usually blurred, which deteriorates the detection effect. In traditional methods, they often identify each shadow pixel separately, resulting in the loss of spatial information contained in neighboring pixels. Moreover, the extracted shadow region may contain some non-shadow components with weak backscattering (such as road, water, and bare soil). The change detection operator [
24] has high sensitivity to the high-intensity pixels, so it can detect the change information accurately. Change detection is frequently used to detect changes in the target or scenes across different periods. This enables the analysis of data discrepancies over various timeframes and locations. However, comparing distinct images across different periods is usually necessary for change detection and it poses important challenges when working with single-time images. To generate the difference image in the case of a single-time image, an image translation strategy is applied to reasonably generate the reference and test images, thus proposing a change detection method.
A slice
containing the suspected shadow region is obtained from the SAR image with a size of
. Thus, shadow regions can be highlighted by inverting
, which is devoted to
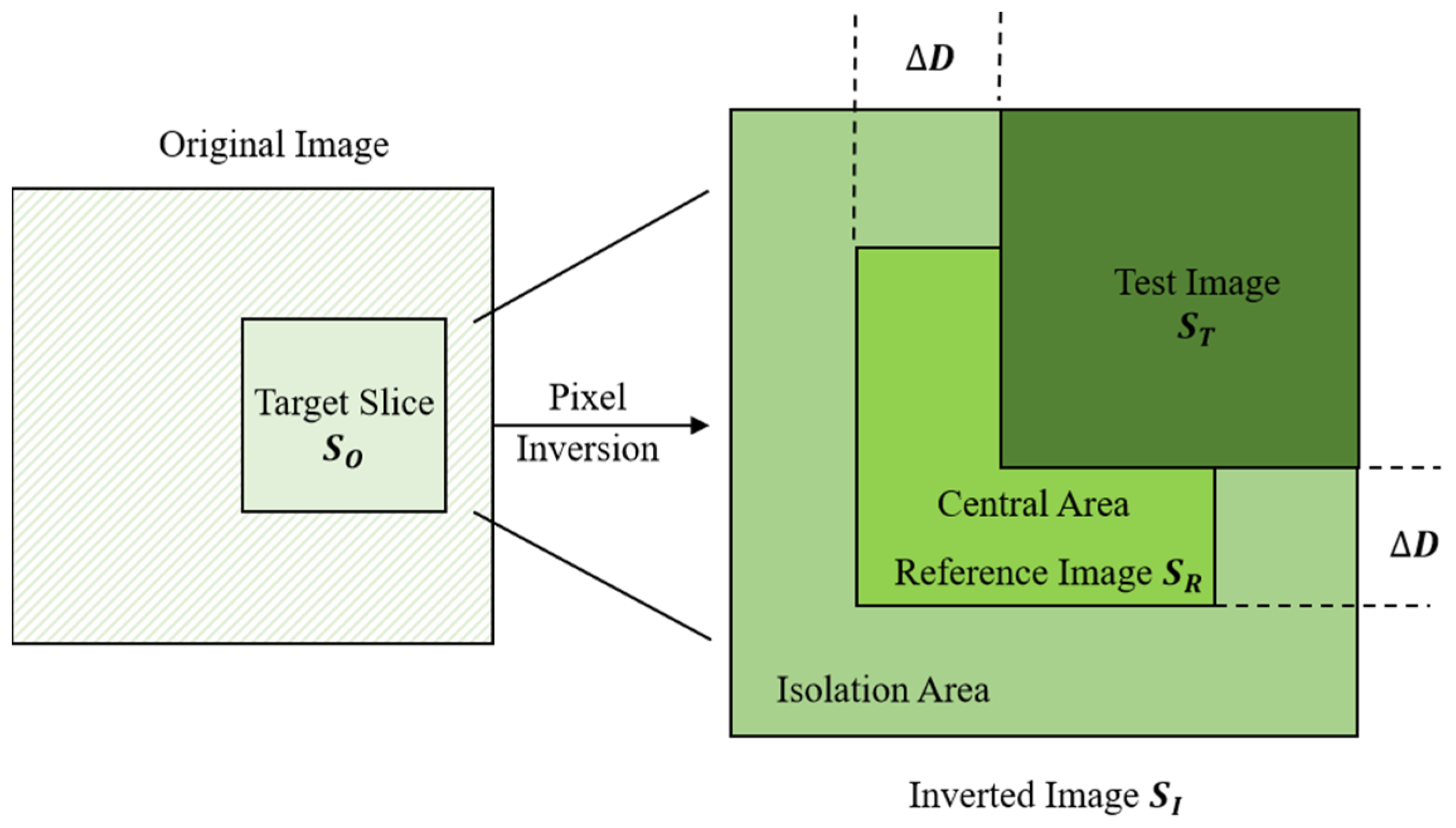
The purpose of the image inversion is to enhance the white or gray details in the dark regions of the SAR image. Assume that the region with a width size of
around
is set as the isolation region, and its internal region is intercepted as the reference image
, whose dimension is
. Subsequently, four test images
(k = 1, 2, 3, 4) can be obtained by translating the reference image in four directions (i.e., upper right, upper left, bottom right, bottom left). The above process is shown in
Figure 1, and the size of the test image is identical to reference images.
The flowchart of the proposed method, shown in
Figure 2, can be divided into the following four parts: difference images generating unit, difference result calculating unit, shadow detection threshold calculating unit, and shadow regions extracting unit.
Generally, change detection obtains the different information between the reference and test images using a specific change detector. In this paper, the Likelihood Ratio Change Detector (LRCD) [
25] is used, which can detect changes with high accuracy and is sensitive to changed information.
The LRCD
is calculated by
Taking a sliding window with a size of
to define the surrounding neighborhood of
, the difference image
can be obtained by normalizing the LRCD
where
denotes the rounding-off function.
Accordingly, the shadow detection threshold is calculated by analyzing the histogram of
, which contains a high-peak region and a low-peak region [
25]. The high peak region represents the invariant part, and the low peak region represents the changing part. The gray value of the dividing point between the two regions can be regarded as the test threshold for one of the test images. Assuming that the gray value corresponding to the peak point is
, the ratio curve of the histogram at two adjacent gray-level values is computed by
where
is the number of pixels of each gray value in the range
.
The dividing point can be selected as the first point satisfying
, which means that the histogram starts to enter the low peak region from this point. Assume that the total number of pixels whose values are larger than the dividing point in the
is
. For the inverted image, let
be the total number of pixels in the value range
. The first value satisfying
can be considered as the test threshold
of test images.
Finally, complete all test images to multiple test thresholds and arithmetic averages. According to the final detection thresholds, the sliced images
are binarized, which is given by
Moreover, morphological processing and area filtering are performed to finely detect the shadow regions in the images.
3. False Target Identification
For some scenes, a SAR image can be divided into three categories: targets, backgrounds, and shadows. A target with certain height will prevent the region that is behind the target and along the beam orientation from being illuminated by sufficient radiation. Therefore, the region cannot generate enough backscatter and will appear as a shadow in the SAR image, as shown in
Figure 3.
The main issue in traditional false target detection methods is extracting shadow regions from the image and realizing the discrimination by determining whether the shadow is present or not. However, the geometric relationship between targets and shadows should be considered properly.
Although shadows result in the loss of scene information at the corresponding location, they still have some characteristics that are helpful for SAR interpretation [
26]. On one hand, all shadows in SAR images are in the same direction as their corresponding targets. That is to say, the targets and shadows have a certain angular relationship with the beam direction [
16]. On the other hand, theoretically, shadows should be close to their corresponding targets. Due to the imaging mechanism or the structural characteristics of the target itself, there may be a certain distance between the target and the shadow [
27]. In addition, the widths of targets and shadows are equal, but due to the detection algorithm, the target may be divided into several small parts or several targets corresponding to a large shadow region, but these width differences will be within a certain range.
By summarizing the relationship between targets and shadows, the characteristics of shadow signatures are summarized, and a three-stage discrimination method is proposed, which is described below.
- (1)
In a SAR image, shadows are generally located along the beam orientation and they distribute at the same side as their corresponding targets. Therefore, the beam orientation is necessary prior information to ascertain the shadow orientation.
The orientation relationship between the target and the shadow is shown in
Figure 4. Assuming that the coordinates of the target and shadow centroid are, respectively,
and
. The LOS (line of sight) is along the positive
y-axis. When the radar beam illuminates the target, the corresponding shadow appears on the other side of the target. Therefore, it is anticipated that the vector direction
that links the centroids of the shadow and the target will nearly match the beam direction
. Equation (7) states that the detected shadow is expected to correspond to the real target if the cosine of the angle between two vectors
and
falls within the determined threshold range
, which means
. As a result, the threshold
is finally set as 1 in this paper. According to the aforementioned characteristics [
26], the first-stage identification condition is proposed as:
- (2)
It is known that the shadow is generally adjacent to its corresponding target. However, in some cases (such as the adoption of different imaging algorithms), there may be some spatial distance between the shadow and the target. Shadow pixels are usually distributed in a certain circle, whose origin point is the centroid of the target, and the radius is the diameter of the target. Thereinto, the diameter of the target can be obtained by measuring the diagonal length of the smallest outer rectangle [
26]. Thus, the second-stage identification condition is proposed as
where
represents the distance, and
is the target diameter.
- (3)
Theoretically, the shadow region should be equal to the width of its corresponding target. The width is defined as the length of the longest line between the target edges, whose direction is perpendicular to the radar beam direction. Based on previous studies [
10], it has been observed that the width of the shadow region is usually greater than the half width of the target. Thus, the third-stage identification condition is proposed as
where
is the width of shadow region, and
is the width of target.
According to the above discussion, if no shadow is detected in the sliced image or the three-stage identification condition is not satisfied, the suspected target is identified as the false target.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}