
Forest Height Inversion by Combining Single-Baseline TanDEM-X InSAR Data with External DTM Data
 , ,
, ,  ,
, 
Abstract
:
1. Introduction
2. Inversion Model and Methodology
2.1. Inversion Model
2.2. GVR Model Derived from InSAR Backscattering
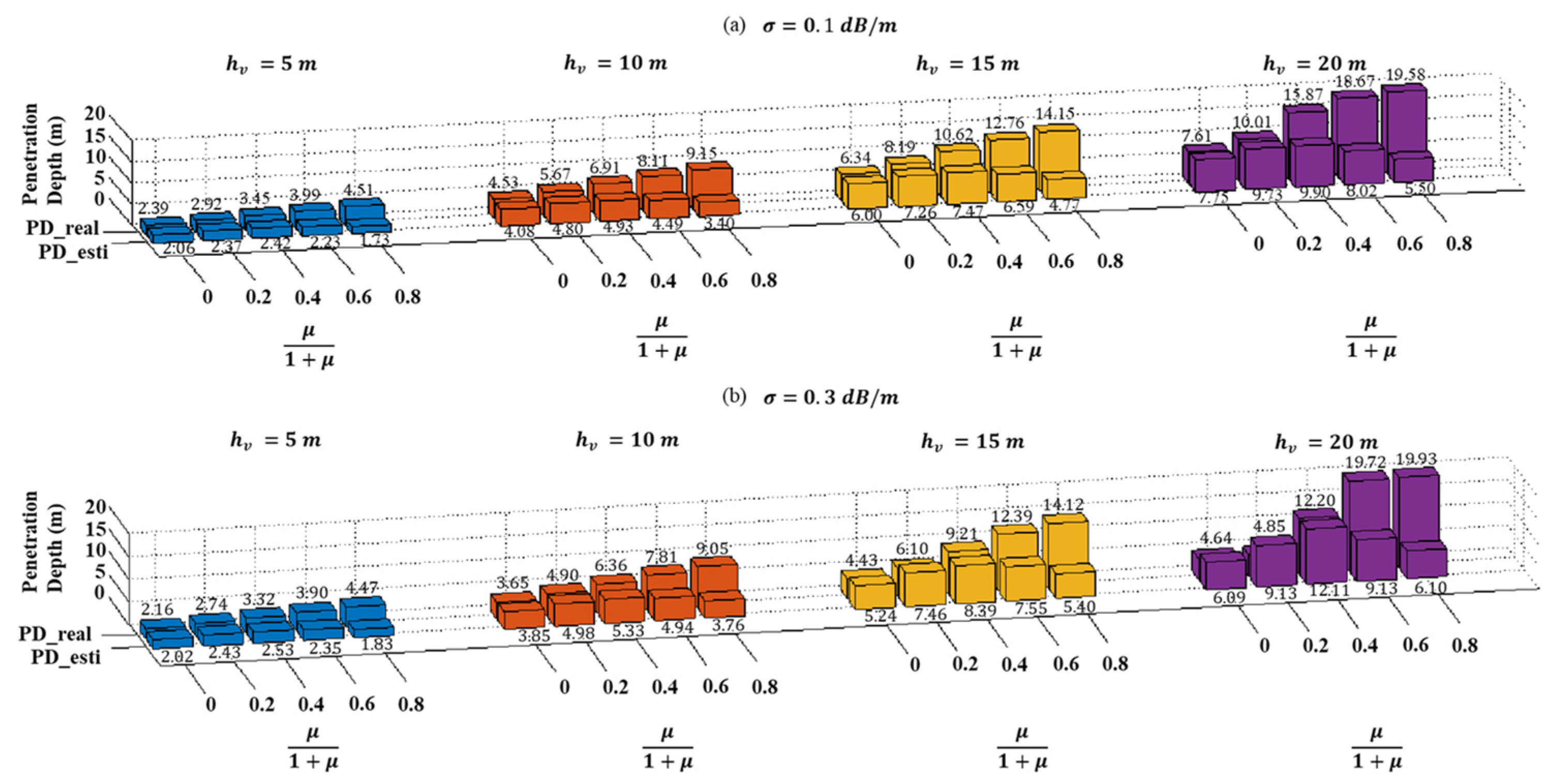
2.3. Approximate Estimation of Penetration Depth
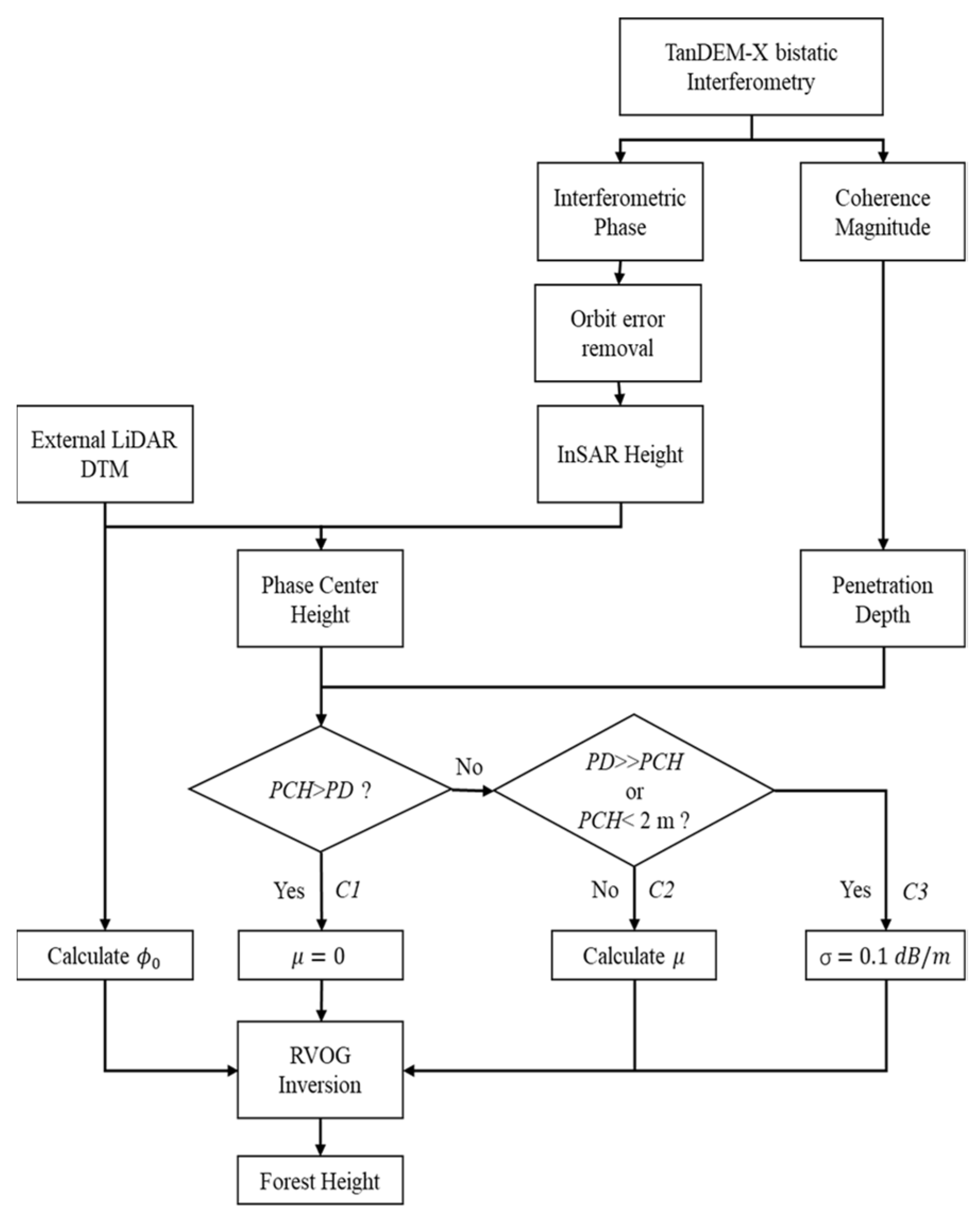
2.4. Forest Height Inversion
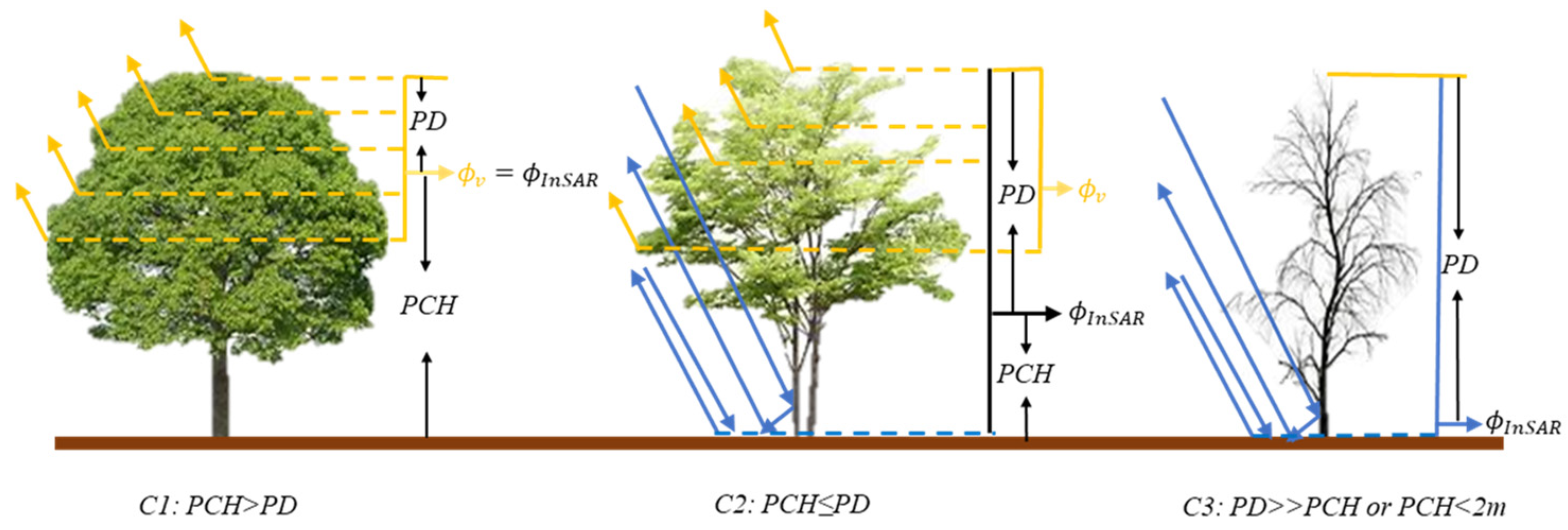
- Case one: Ground ignored, i.e., GVR = 0.
- Case two: Extinction fixed.
- Case three: GEDI simulation, i.e., introduce the LiDAR canopy height model (CHM) data.
- Case four: The method proposed in this work. If the penetration depth is shorter than forest height, the GVR is ignored. Otherwise, GVR is estimated from InSAR data with the GVR model.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Method | Additional Data | RVoG Parameters |
|---|---|---|---|
| One | Ground ignored | None | |
| Two | Extinction fixed | None | σ = 0.3 dB/m |
| Three | GEDI simulation | LiDAR CHM downsampled at intervals of 60 m in azimuth and 500 m in range | σ and maps interpolated from σ and values along simulated GEDI tracks |
| Four | Proposed method | None | If PD < PCH then = 0, if PD >> PCH or PCH < 2 m then σ = 0.1 dB/m; otherwise, from GVR model |
3. Test Sites and Experimental Data
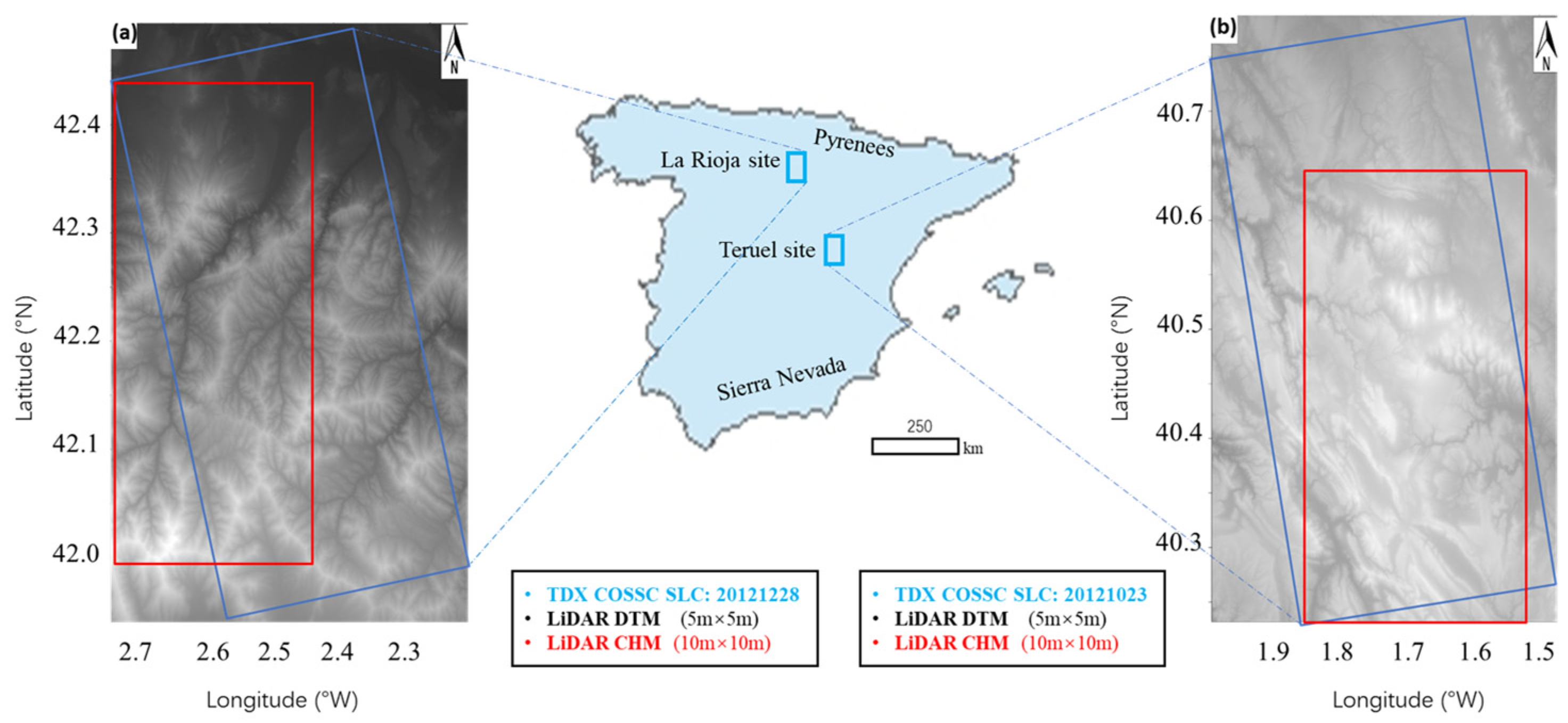
3.1. Test Sites
3.2. LiDAR Data
3.3. TanDEM-X InSAR Data
4. Results
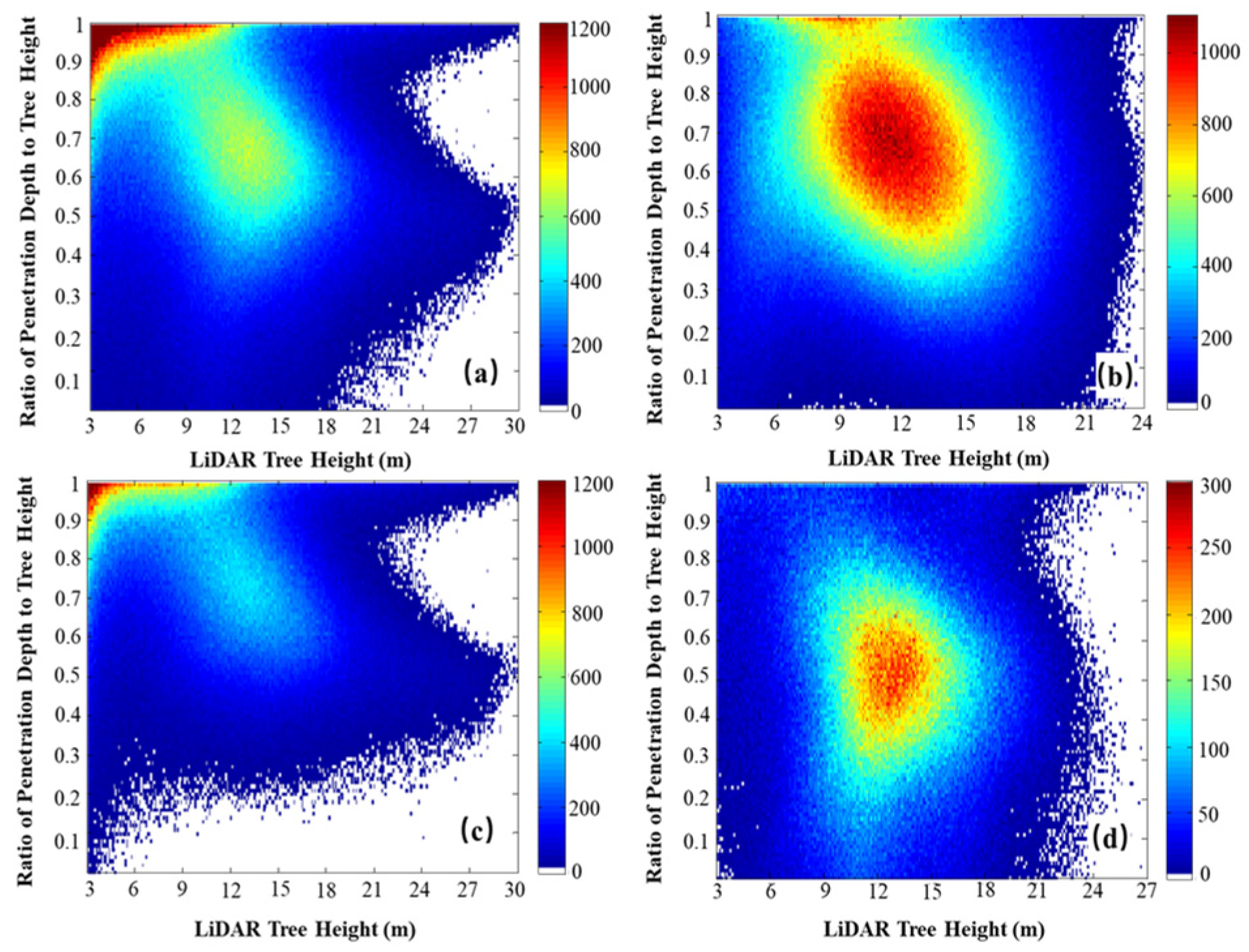
4.1. Penetration Performance in Two Sites
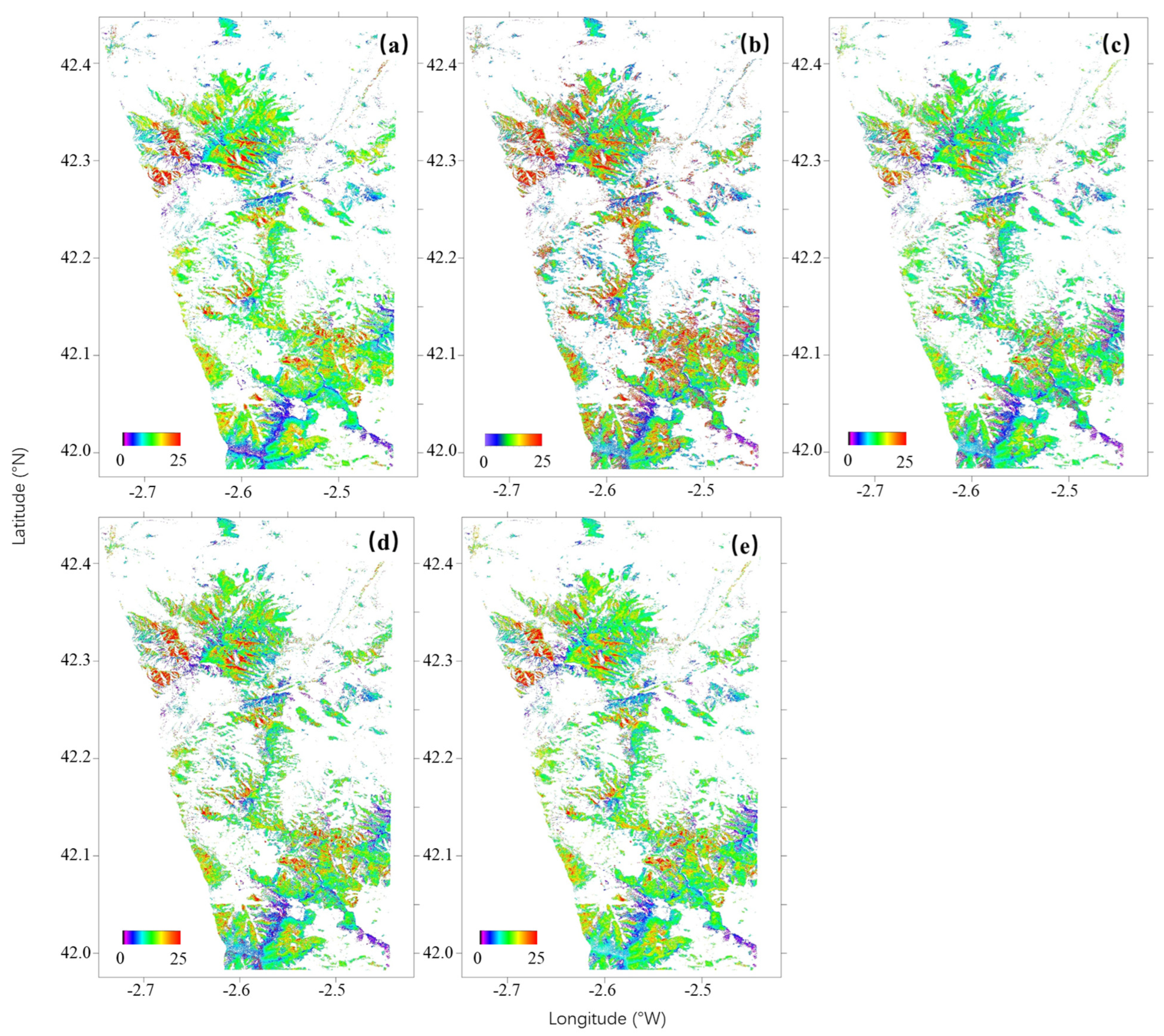
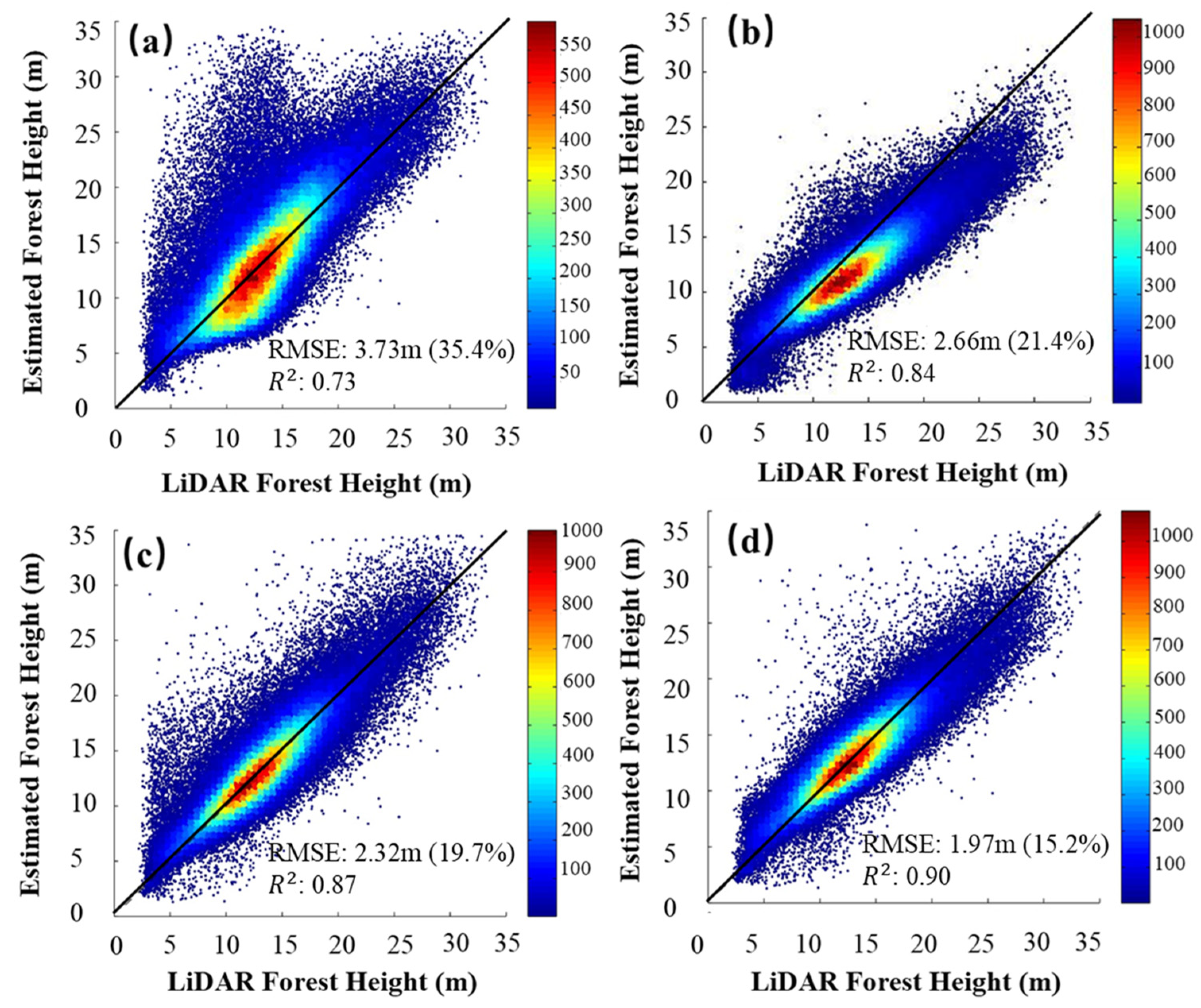
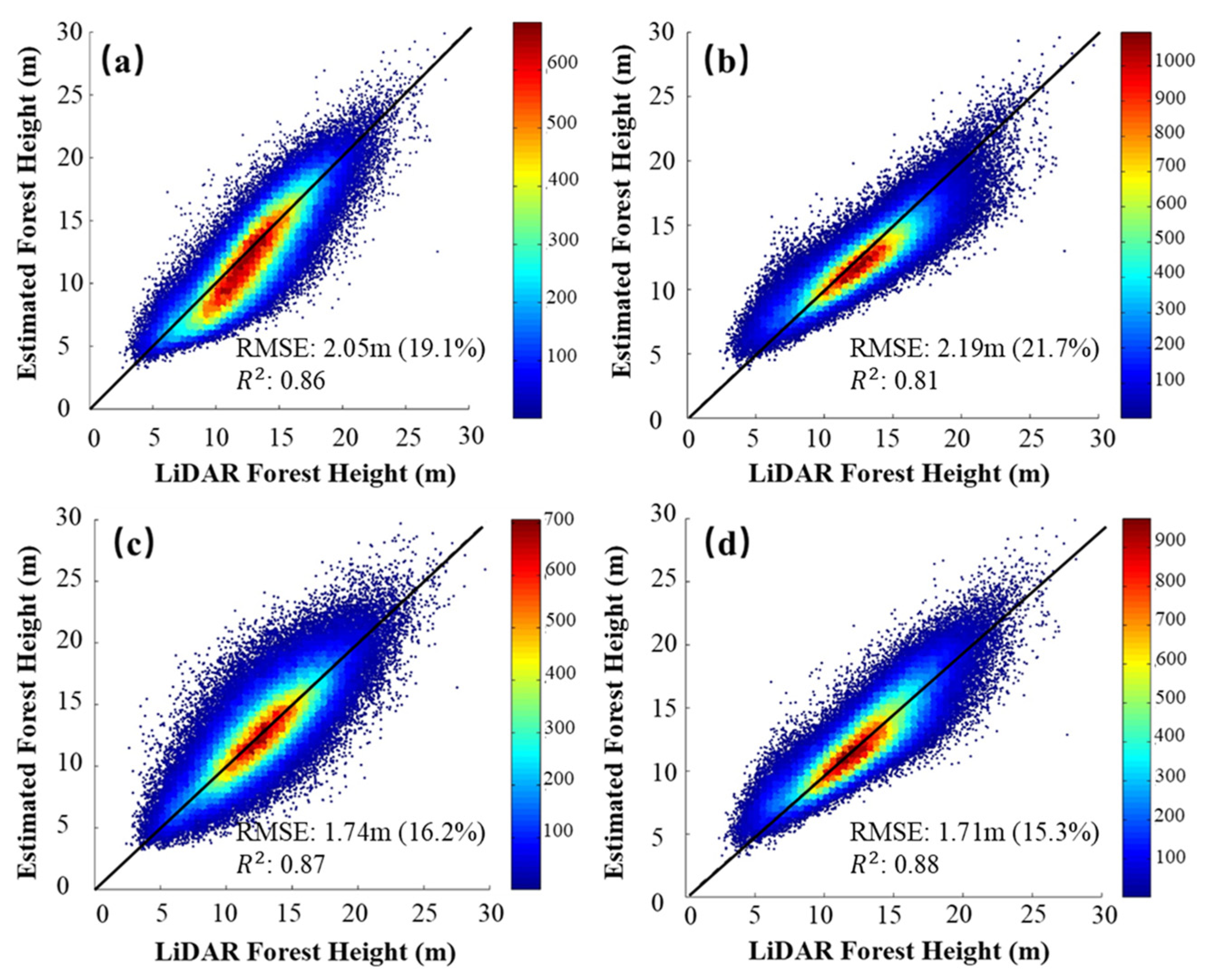
4.2. Inversion at the La Rioja Test Site
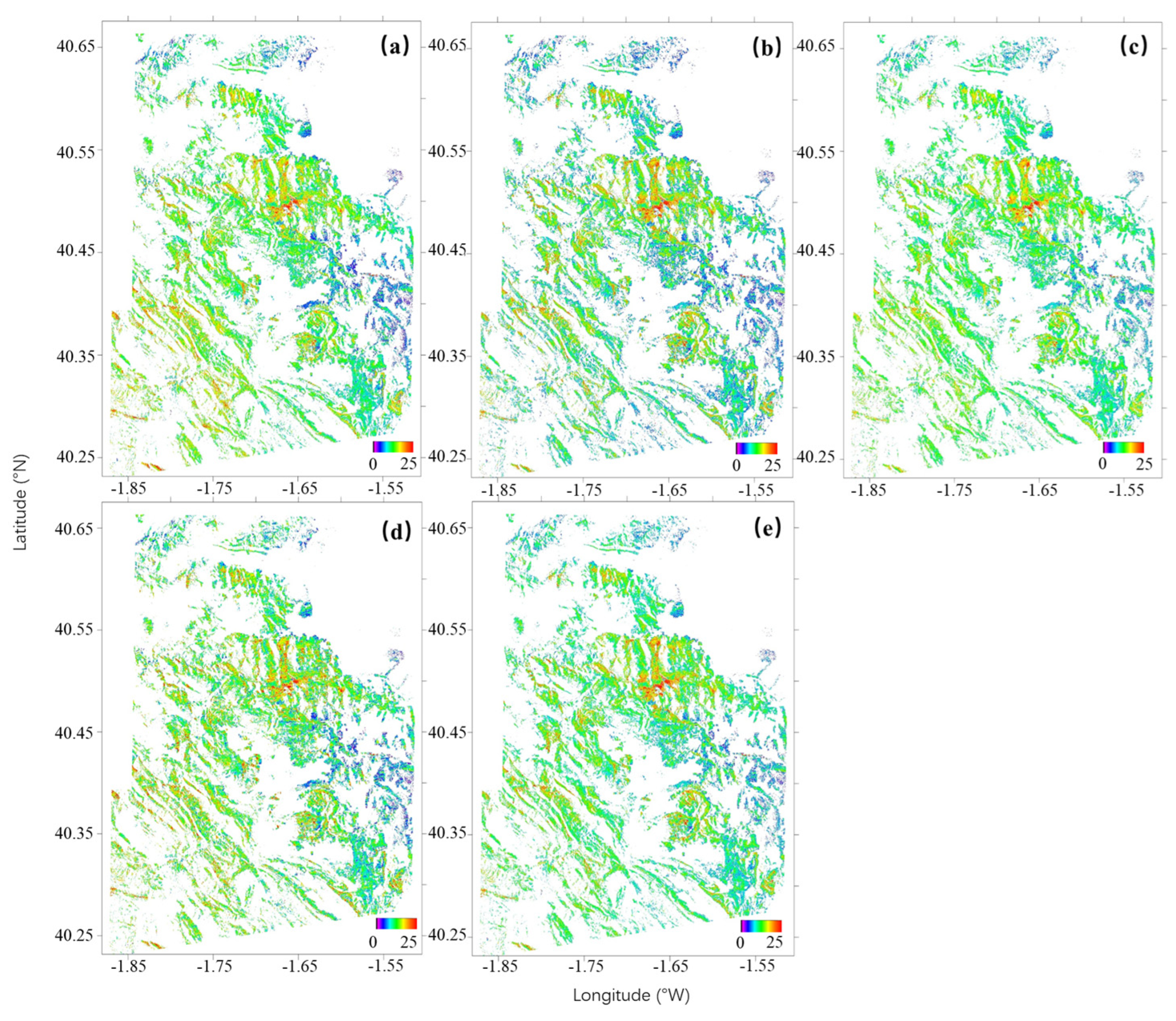
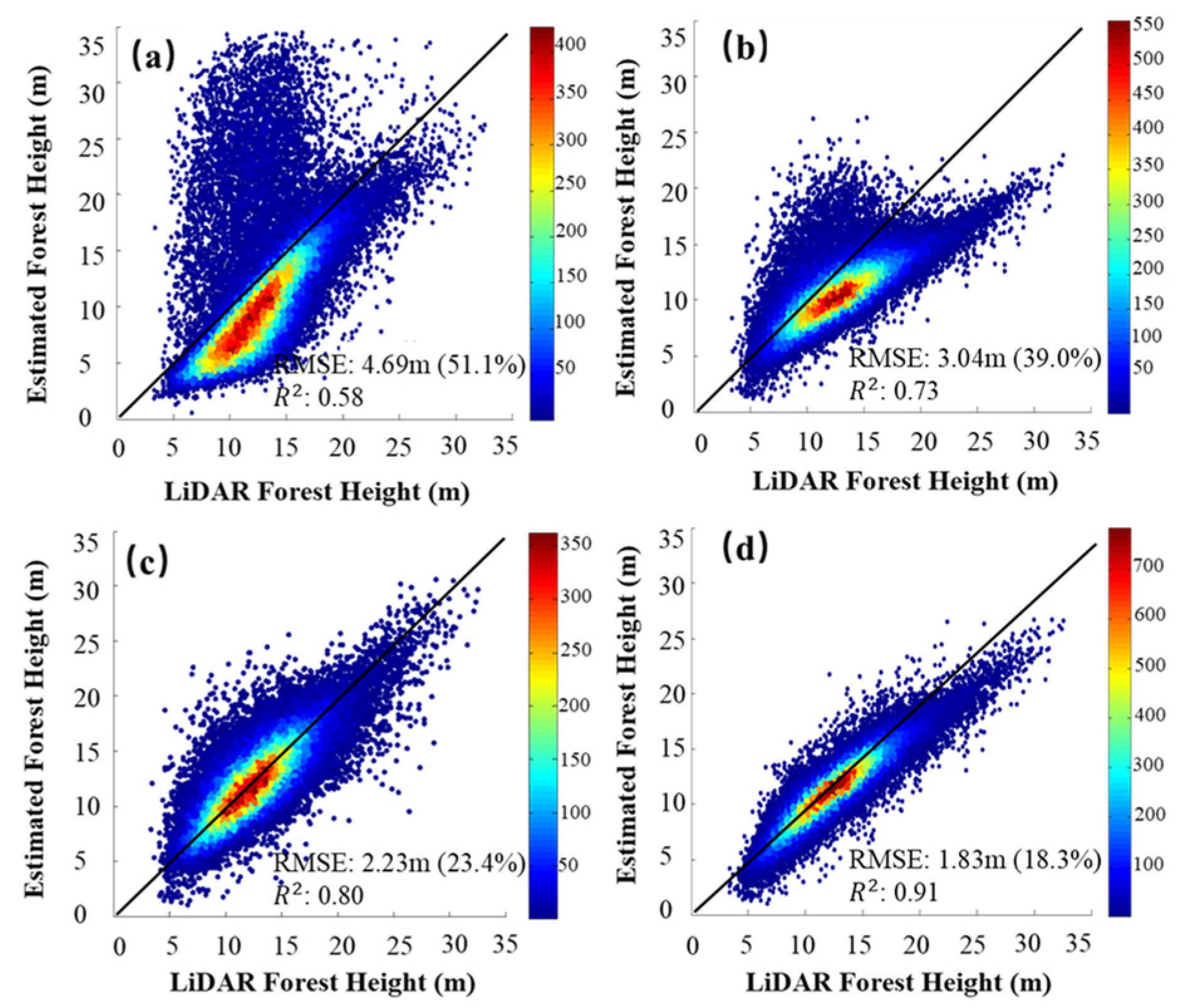
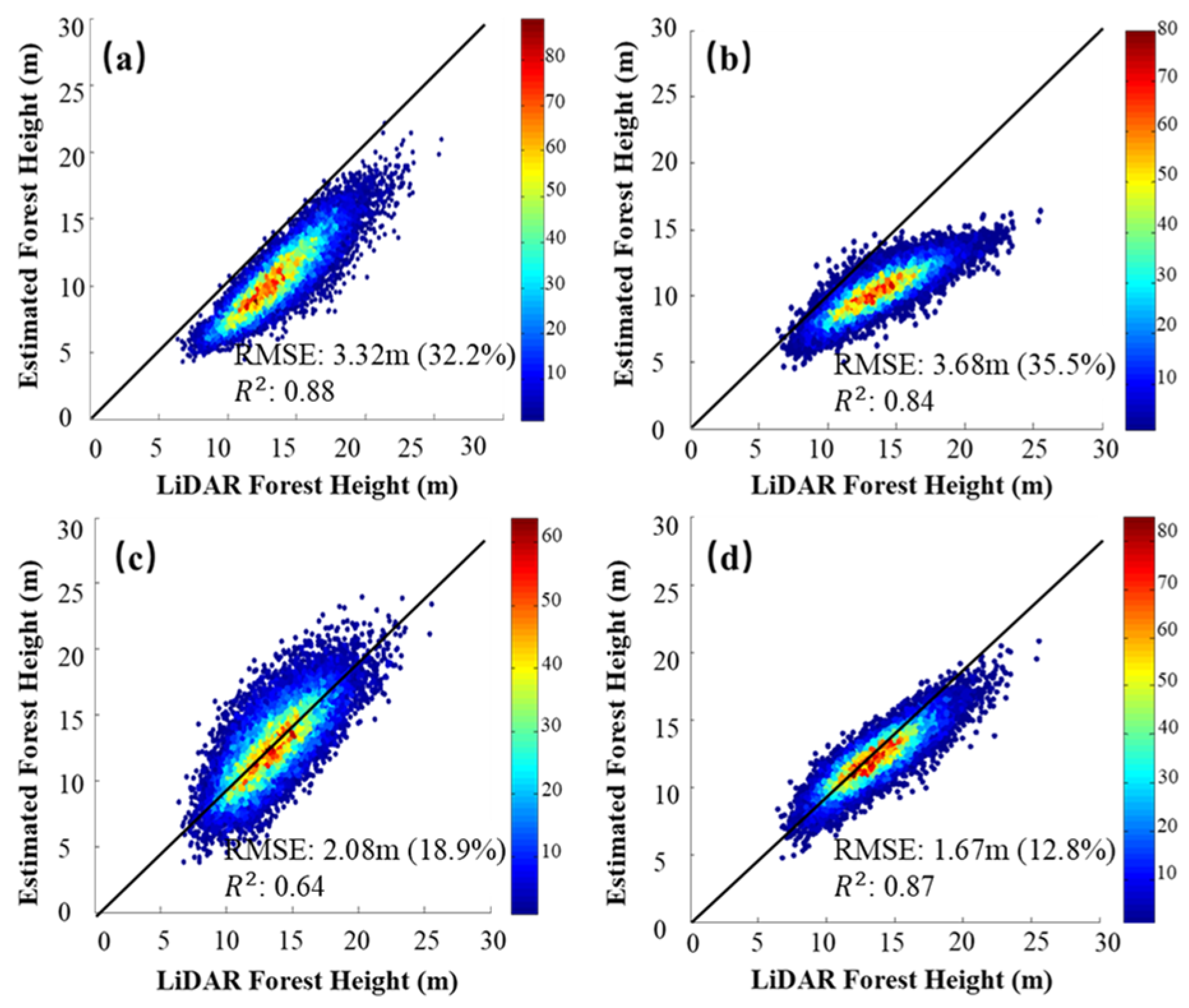
4.3. Inversion at the Teruel Test Site
5. Discussion
5.1. Retrieved Height with Full Penetration
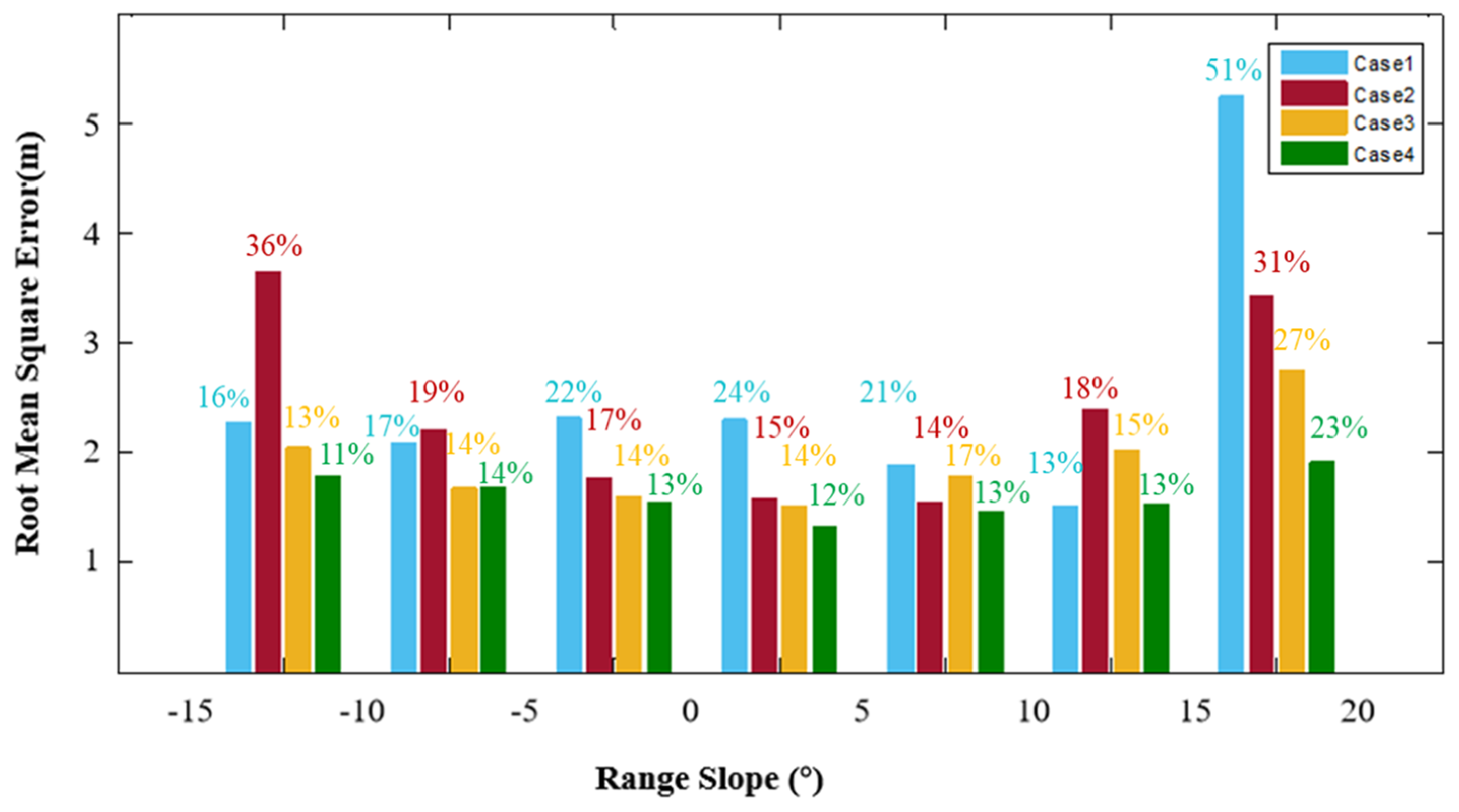
5.2. Slope Effect
5.3. Influence of PD Estimation Error on Canopy Height Inversion
5.4. Robustness and Error Sources of the Proposed Inversion Framework
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schlund, M.; Erasmi, S.; Scipal, K. Comparison of Aboveground Biomass Estimation From InSAR and LiDAR Canopy Height Models in Tropical Forests. IEEE Geosci. Remote Sens. Lett. 2020, 17, 367–371. [Google Scholar] [CrossRef]
- Nelson, R.; Margolis, H.; Montesano, P.; Sun, G.; Cook, B.; Corp, L.; Andersen, H.-E.; deJong, B.; Pellat, F.P.; Fickel, T.; et al. Lidar-Based Estimates of Aboveground Biomass in the Continental US and Mexico Using Ground, Airborne, and Satellite Observations. Remote Sens. Environ. 2017, 188, 127–140. [Google Scholar] [CrossRef]
- Thomas, R.Q.; Hurtt, G.C.; Dubayah, R.; Schilz, M.H. Using Lidar Data and a Height-Structured Ecosystem Model to Estimate Forest Carbon Stocks and Fluxes over Mountainous Terrain. Can. J. Remote Sens. 2008, 34, S351–S363. [Google Scholar] [CrossRef]
- Lagomasino, D.; Fatoyinbo, T.; Lee, S.; Feliciano, E.; Trettin, C.; Shapiro, A.; Mangora, M.M. Measuring Mangrove Carbon Loss and Gain in Deltas. Environ. Res. Lett. 2019, 14, 025002. [Google Scholar] [CrossRef]
- Askne, J.; Fransson, J.; Santoro, M.; Soja, M.; Ulander, L. Model-Based Biomass Estimation of a Hemi-Boreal Forest from Multitemporal TanDEM-X Acquisitions. Remote Sens. 2013, 5, 5574–5597. [Google Scholar] [CrossRef]
- Kugler, F.; Schulze, D.; Hajnsek, I.; Pretzsch, H.; Papathanassiou, K.P. TanDEM-X Pol-InSAR Performance for Forest Height Estimation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6404–6422. [Google Scholar] [CrossRef]
- Treuhaft, R.; Gonçalves, F.; dos Santos, J.R.; Keller, M.; Palace, M.; Madsen, S.N.; Sullivan, F.; Graça, P.M.L.A. Tropical-Forest Biomass Estimation at X-Band From the Spaceborne TanDEM-X Interferometer. IEEE Geosci. Remote Sens. Lett. 2015, 12, 239–243. [Google Scholar] [CrossRef]
- Lei, Y.; Treuhaft, R.; Gonçalves, F. Automated Estimation of Forest Height and Underlying Topography over a Brazilian Tropical Forest with Single-Baseline Single-Polarization TanDEM-X SAR Interferometry. Remote Sens. Environ. 2021, 252, 112132. [Google Scholar] [CrossRef]
- Lei, Y.; Treuhaft, R.; Keller, M.; dos-Santos, M.; Goncalves, F. Quantification of Selective Logging in Tropical Forest with Spaceborne SAR Interferometry. Remote Sens. Environ. Interdiscip. J. 2018, 221, 167–183. [Google Scholar] [CrossRef]
- Shiroma, G.H.X.; Lavalle, M. Digital Terrain, Surface, and Canopy Height Models From InSAR Backscatter-Height Histograms. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3754–3777. [Google Scholar] [CrossRef]
- Treuhaft, R.N.; Chapman, B.D.; Santos, J.D.; GonçAlves, F.G.; Dutra, L.V.; GraçA, P.; Drake, J.B. Vegetation Profiles in Tropical Forests from Multibaseline Interferometric Synthetic Aperture Radar, Field, and Lidar Measurements. J. Geophys. Res. 2009, 114, D23110. [Google Scholar] [CrossRef]
- Treuhaft, R.N.; Madsen, S.N.; Moghaddam, M.; Zyl, J.J. van Vegetation Characteristics and Underlying Topography from Interferometric Radar. Radio Sci. 1996, 31, 1449–1485. [Google Scholar] [CrossRef]
- Papathanassiou, K.P.; Cloude, S.R. Single-Baseline Polarimetric SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2352–2363. [Google Scholar] [CrossRef]
- Chen, H.; Cloude, S.R.; Goodenough, D.G. Forest Canopy Height Estimation Using Tandem-X Coherence Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3177–3188. [Google Scholar] [CrossRef]
- Olesk, A.; Praks, J.; Antropov, O.; Zalite, K.; Arumäe, T.; Voormansik, K. Interferometric SAR Coherence Models for Characterization of Hemiboreal Forests Using TanDEM-X Data. Remote Sens. 2016, 8, 700. [Google Scholar] [CrossRef]
- Schlund, M.; Magdon, P.; Eaton, B.; Aumann, C.; Erasmi, S. Canopy Height Estimation with TanDEM-X in Temperate and Boreal Forests. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101904. [Google Scholar] [CrossRef]
- Chen, H.; Cloude, S.R.; Goodenough, D.G.; Hill, D.A.; Nesdoly, A. Radar Forest Height Estimation in Mountainous Terrain Using Tandem-X Coherence Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3443–3452. [Google Scholar] [CrossRef]
- Praks, J.; Kugler, F.; Papathanassiou, K.P.; Hajnsek, I.; Hallikainen, M. Height Estimation of Boreal Forest: Interferometric Model-Based Inversion at L- and X-Band Versus HUTSCAT Profiling Scatterometer. IEEE Geosci. Remote Sens. Lett. 2007, 4, 466–470. [Google Scholar] [CrossRef]
- Kugler, F.; Lee, S.-K.; Hajnsek, I.; Papathanassiou, K.P. Forest Height Estimation by Means of Pol-InSAR Data Inversion: The Role of the Vertical Wavenumber. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5294–5311. [Google Scholar] [CrossRef]
- Hajnsek, I.; Kugler, F.; Lee, S.-K.; Papathanassiou, K.P. Tropical-Forest-Parameter Estimation by Means of Pol-InSAR: The INDREX-II Campaign. IEEE Trans. Geosci. Remote Sens. 2009, 47, 481–493. [Google Scholar] [CrossRef]
- Qi, W.; Dubayah, R.O. Combining Tandem-X InSAR and Simulated GEDI Lidar Observations for Forest Structure Mapping. Remote Sens. Environ. 2016, 187, 253–266. [Google Scholar] [CrossRef]
- Qi, W.; Lee, S.-K.; Hancock, S.; Luthcke, S.; Tang, H.; Armston, J.; Dubayah, R. Improved Forest Height Estimation by Fusion of Simulated GEDI Lidar Data and TanDEM-X InSAR Data. Remote Sens. Environ. 2019, 221, 621–634. [Google Scholar] [CrossRef]
- Ballester-Berman, J.D. Reviewing the Role of the Extinction Coefficient in Radar Remote Sensing. arXiv 2020, arXiv:2012.02609. [Google Scholar] [CrossRef]
- Dall, J. InSAR Elevation Bias Caused by Penetration Into Uniform Volumes. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2319–2324. [Google Scholar] [CrossRef]
- Schlund, M.; Baron, D.; Magdon, P.; Erasmi, S. Canopy Penetration Depth Estimation with TanDEM-X and Its Compensation in Temperate Forests. ISPRS J. Photogramm. Remote Sens. 2019, 147, 232–241. [Google Scholar] [CrossRef]
- Cloude, S. Polarisation: Applications in Remote Sensing; Oxford University Press: Oxford, UK, 2009. [Google Scholar]
- Praks, J.; Antropov, O.; Hallikainen, M.T. LIDAR-Aided SAR Interferometry Studies in Boreal Forest: Scattering Phase Center and Extinction Coefficient at X- and L-Band. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3831–3843. [Google Scholar] [CrossRef]
- Gómez, C.; Lopez-Sanchez, J.M.; Romero-Puig, N.; Zhu, J.; Fu, H.; He, W.; Xie, Y.; Xie, Q. Canopy Height Estimation in Medi terranean Forests of Spain With TanDEM-X Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2956–2970. [Google Scholar] [CrossRef]
- Vallejo-Bombín, R. The Spanish Forest Map scale 1:50000 (MFE50) as base for the third national forest inventory. Cuad. Soc. Esp. Cienc. For. 2005, 19, 205–210. [Google Scholar]
- Arozarena, A.; García, L.; Villa, G.; Hermosilla, J.; Papi, F.; Valcarcel, N.; Peces, J.; Domenech, E.; García, C.; Tejeiro, J. The Spanish National Territory Observation Program: Current states and next steps. Mapping Inter. 2006, 111, 16–22. [Google Scholar]
- Gatelli, F.; Monti Guamieri, A.; Parizzi, F.; Pasquali, P.; Prati, C.; Rocca, F. The Wavenumber Shift in SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 1994, 32, 855–865. [Google Scholar] [CrossRef]
- Rizzoli, P.; Dell’Amore, L.; Bueso-Bello, J.-L.; Gollin, N.; Carcereri, D.; Martone, M. On the Derivation of Volume Decorrelation From TanDEM-X Bistatic Coherence. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 3504–3518. [Google Scholar] [CrossRef]
- Xiong, B.; Chen, J.M.; Kuang, G.; Kadowaki, N. Estimation of the Repeat-Pass ALOS PALSAR Interferometric Baseline Through Direct Least-Square Ellipse Fitting. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3610–3617. [Google Scholar] [CrossRef]
- Olesk, A.; Voormansik, K.; Vain, A.; Noorma, M.; Praks, J. Seasonal Differences in Forest Height Estimation From Interfero metric TanDEM-X Coherence Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5565–5572. [Google Scholar] [CrossRef]
- Lu, H.; Suo, Z.; Guo, R.; Bao, Z. S-RVoG Model for Forest Parameters Inversion over Underlying Topography. Electron. Lett. 2013, 49, 618–619. [Google Scholar] [CrossRef]
- Fu, H.Q.; Zhu, J.J.; Wang, C.C.; Zhao, R.; Xie, Q.H. Underlying Topography Estimation Over Forest Areas Using Single-Baseline InSAR Data. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2876–2888. [Google Scholar] [CrossRef]
- Wang, H.; Fu, H.; Zhu, J.; Liu, Z.; Zhang, B.; Wang, C.; Li, Z.; Hu, J.; Yu, Y. Estimation of Subcanopy Topography Based on Single-Baseline TanDEM-X InSAR Data. J. Geod. 2021, 95, 84. [Google Scholar] [CrossRef]


| Area | Date | HoA (m) | Look Angle (°) |
|---|---|---|---|
| La Rioja | 28 December 2012 | 36.58 | 34.73 |
| Teruel | 23 October 2012 | 32.29 | 37.10 |
| Studies/Cases | Forest Type | RMSE (m) | RMSE (%) | Correlation Coefficient |
|---|---|---|---|---|
| Qi’s/μ = 0 | Coniferous forest | 6.83 | 17.7 | 0.53 |
| Broadleaved forest | 6.22 | 25.9 | 0.32 | |
| Ours/μ = 0 | Coniferous forest | 2.05 | 19.1 | 0.86 |
| Coniferous and broadleaved forest | 3.73 | 35.4 | 0.73 | |
| Qi’s/μ = 0, σ from GEDI | Coniferous forest | 6.03 | 15.6 | 0.60 |
| Broadleaved forest | 4.21 | 17.5 | 0.50 | |
| Ours/σ fixed as 0.3 dB/m | Coniferous forest | 2.19 | 21.7 | 0.81 |
| Coniferous and broadleaved forest | 2.66 | 21.4 | 0.84 | |
| Qi’s/ μ, σ from simulated GEDI | Coniferous forest | 4.30 | 13.1 | 0.44 |
| Broadleaved forest | 2.66 | 11.1 | 0.68 | |
| Ours/μ, σ from simulated GEDI | Coniferous forest | 1.74 | 16.2 | 0.87 |
| Coniferous and broadleaved forest | 2.32 | 19.7 | 0.87 | |
| Ours/Proposed Inversion Framework | Coniferous forest | 1.71 | 15.3 | 0.88 |
| Coniferous and broadleaved forest | 1.97 | 15.2 | 0.90 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, W.; Zhu, J.; Lopez-Sanchez, J.M.; Gómez, C.; Fu, H.; Xie, Q. Forest Height Inversion by Combining Single-Baseline TanDEM-X InSAR Data with External DTM Data. Remote Sens. 2023, 15, 5517. https://doi.org/10.3390/rs15235517
He W, Zhu J, Lopez-Sanchez JM, Gómez C, Fu H, Xie Q. Forest Height Inversion by Combining Single-Baseline TanDEM-X InSAR Data with External DTM Data. Remote Sensing. 2023; 15(23):5517. https://doi.org/10.3390/rs15235517
Chicago/Turabian StyleHe, Wenjie, Jianjun Zhu, Juan M. Lopez-Sanchez, Cristina Gómez, Haiqiang Fu, and Qinghua Xie. 2023. "Forest Height Inversion by Combining Single-Baseline TanDEM-X InSAR Data with External DTM Data" Remote Sensing 15, no. 23: 5517. https://doi.org/10.3390/rs15235517
APA StyleHe, W., Zhu, J., Lopez-Sanchez, J. M., Gómez, C., Fu, H., & Xie, Q. (2023). Forest Height Inversion by Combining Single-Baseline TanDEM-X InSAR Data with External DTM Data. Remote Sensing, 15(23), 5517. https://doi.org/10.3390/rs15235517