
Suspended Sediment Concentration Estimation along Turbid Water Outflow Using a Multispectral Camera on an Unmanned Aerial Vehicle


Abstract
:1. Introduction
2. Materials and Methods
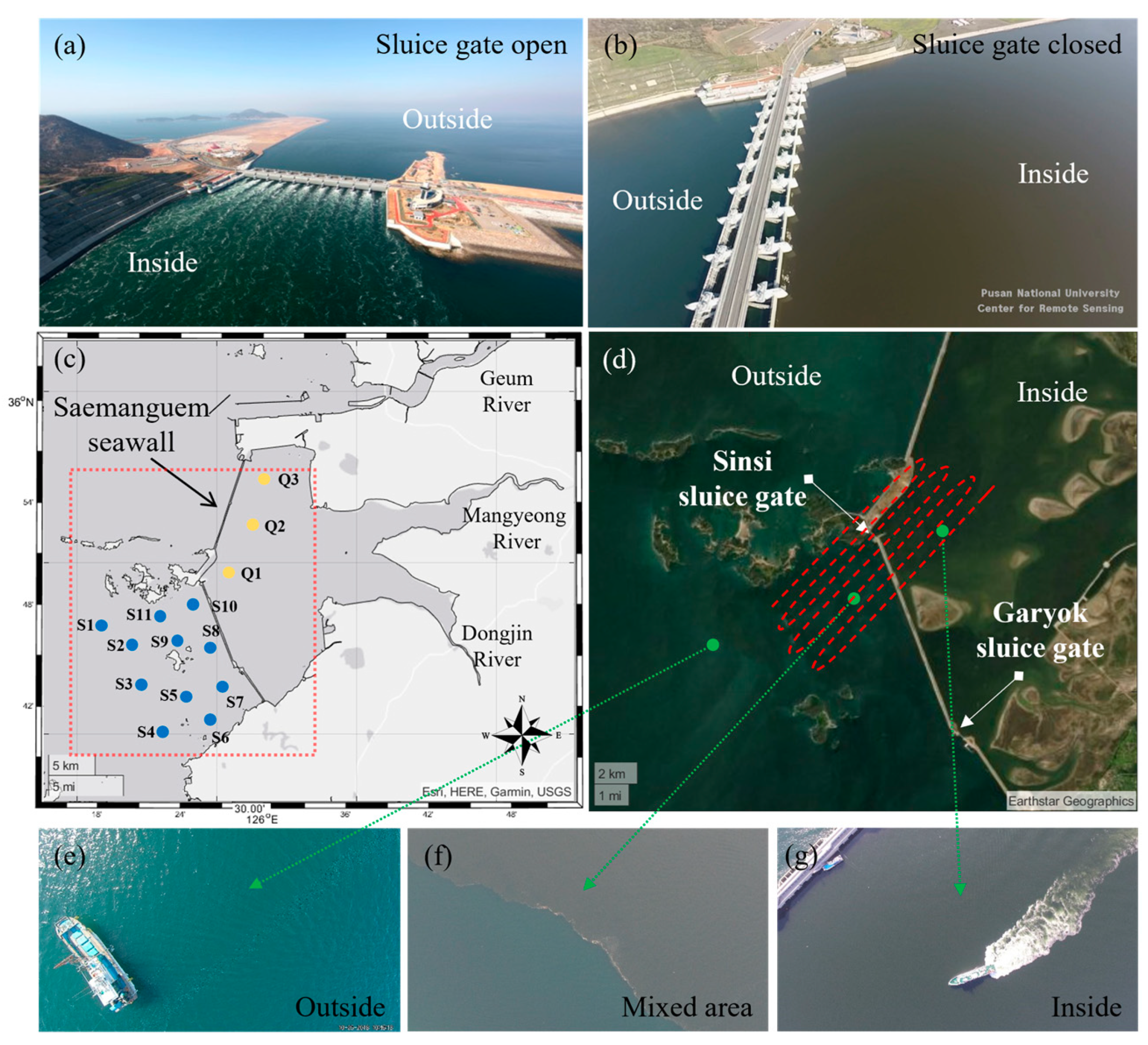
2.1. Study Area
2.2. Field Measurements
2.2.1. Water Sampling to Measure SSC
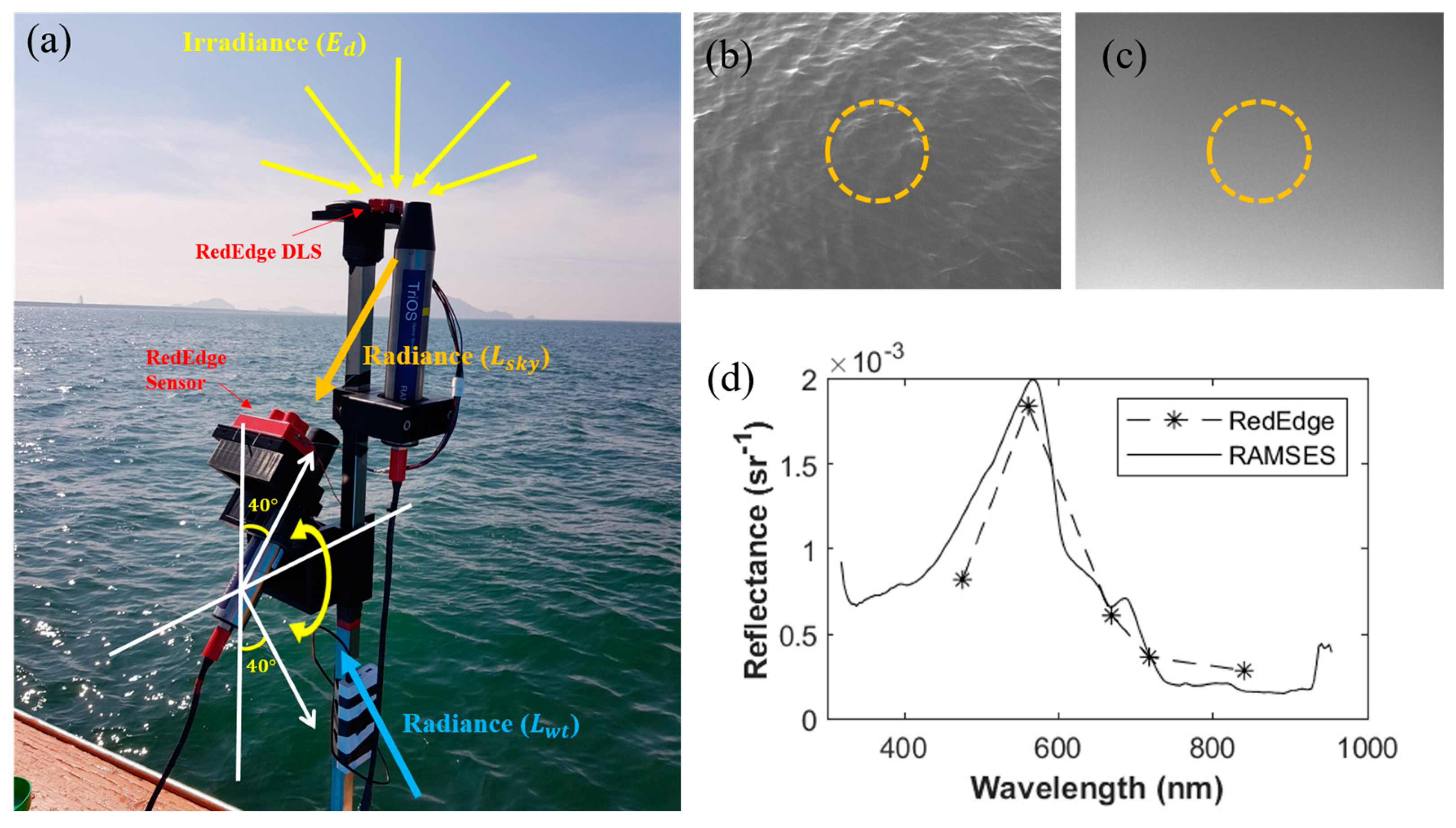
2.2.2. In situ Spectral Measurements for the Water Surface
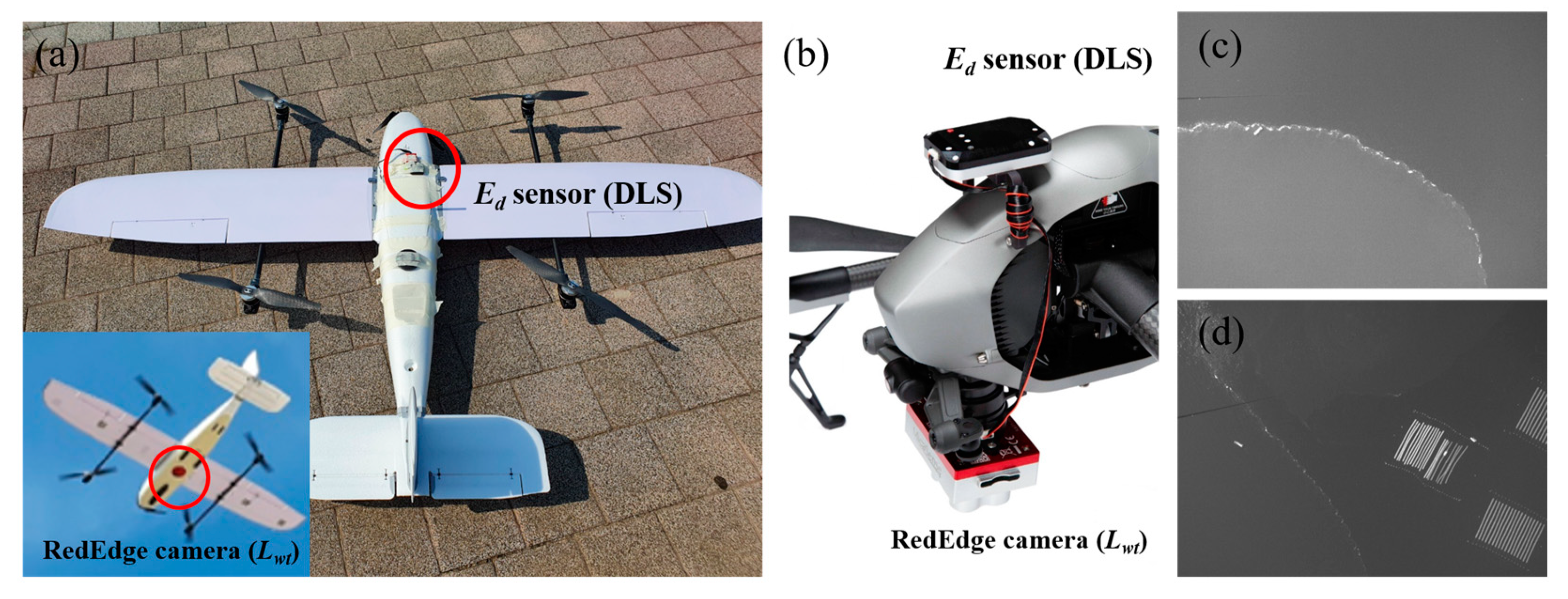
2.2.3. Multispectral Imagery from the UAV-Borne RedEdge
2.3. Multispectral Image Processing
2.3.1. Image Preprocessing
2.3.2. Calculating Water Surface Reflectance
2.3.3. Reflectance of UAV Multispectral Images
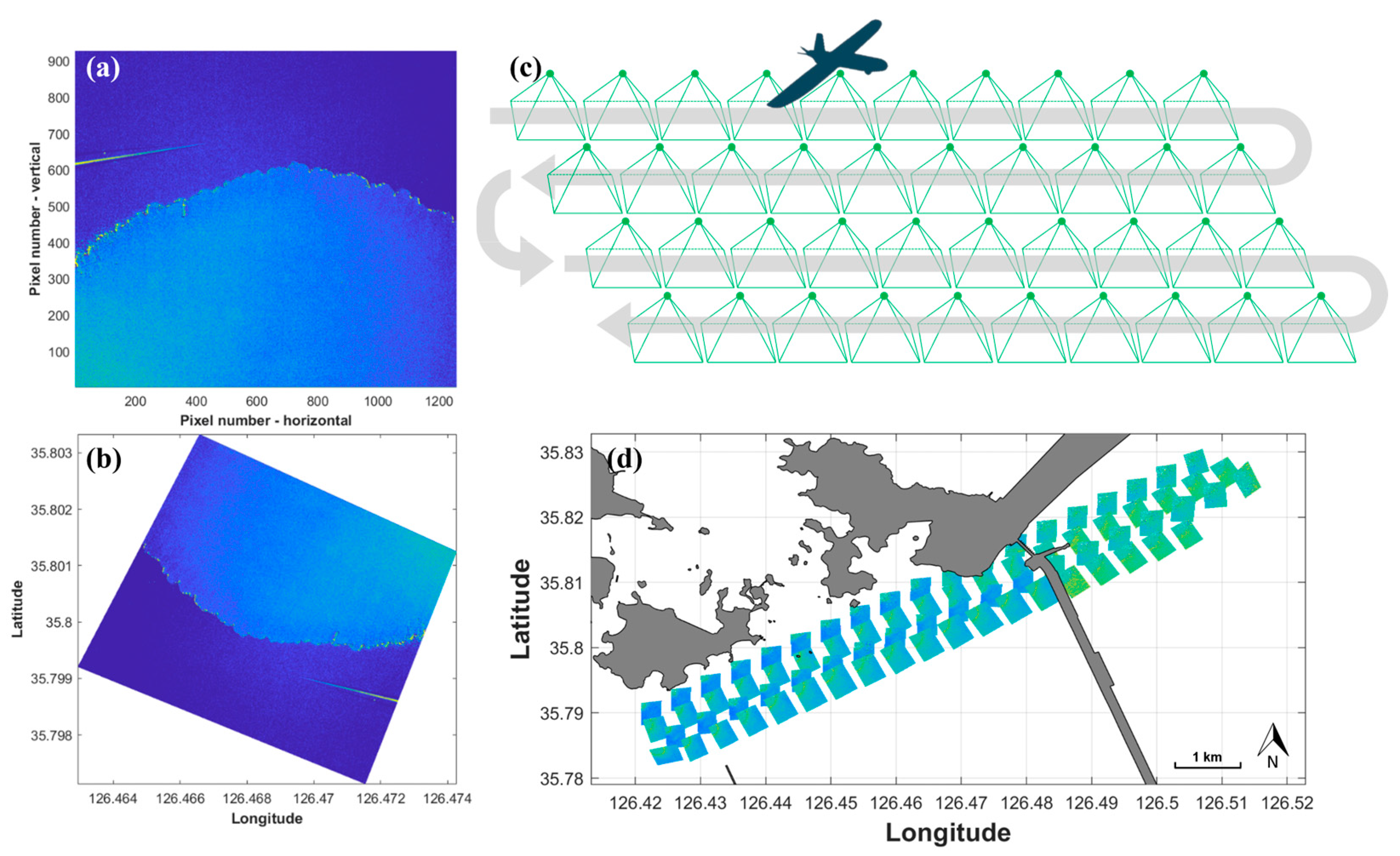
2.4. Georeferencing on the Water Surface
3. Results
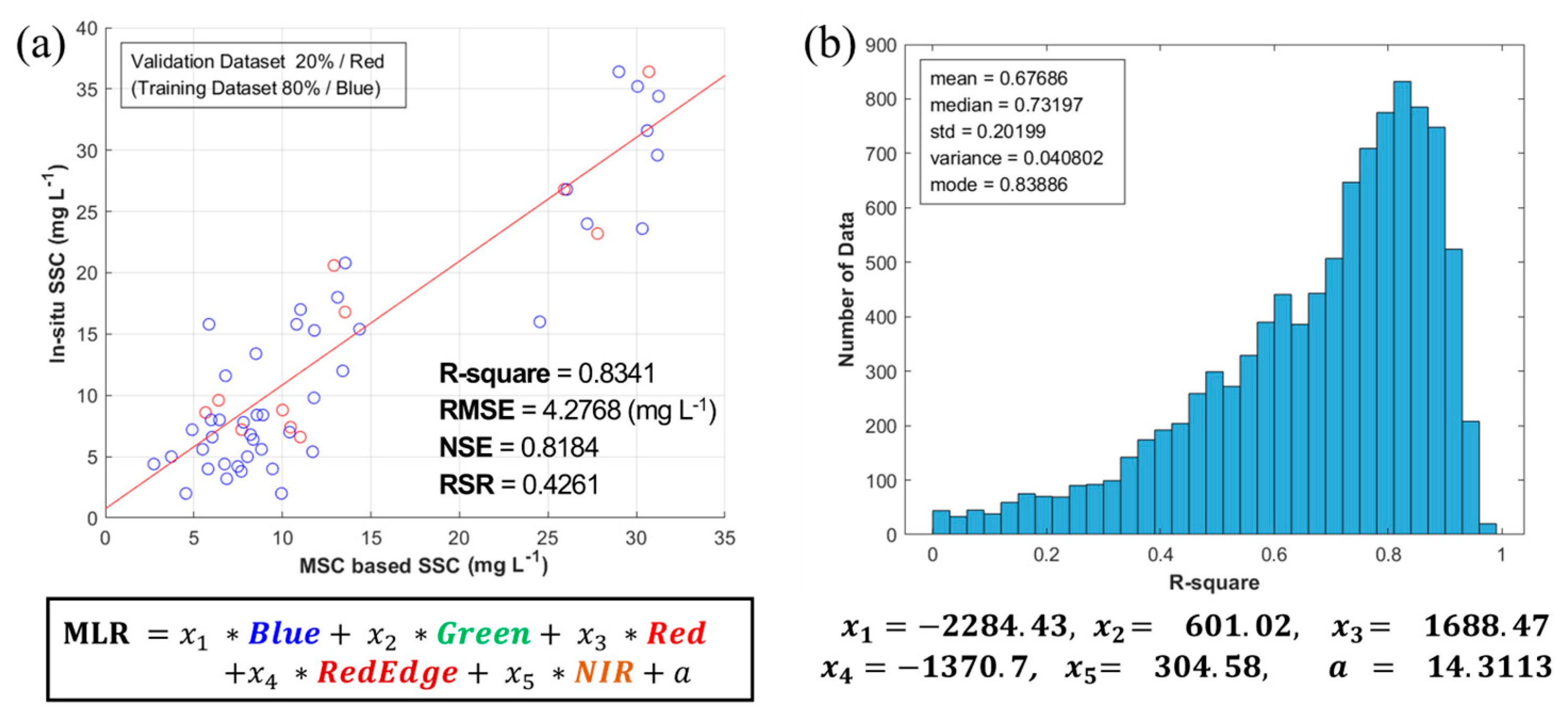
3.1. SSC Estimation and Validation Results
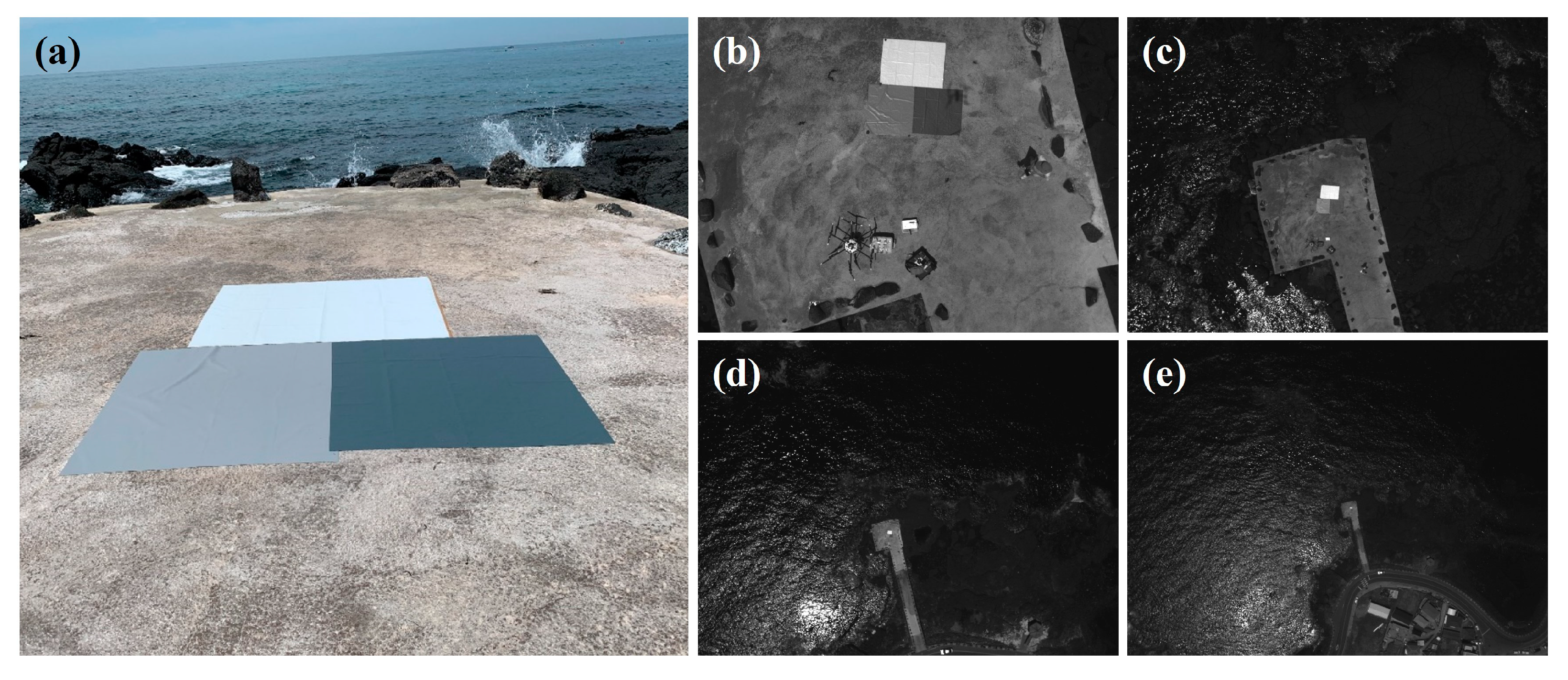
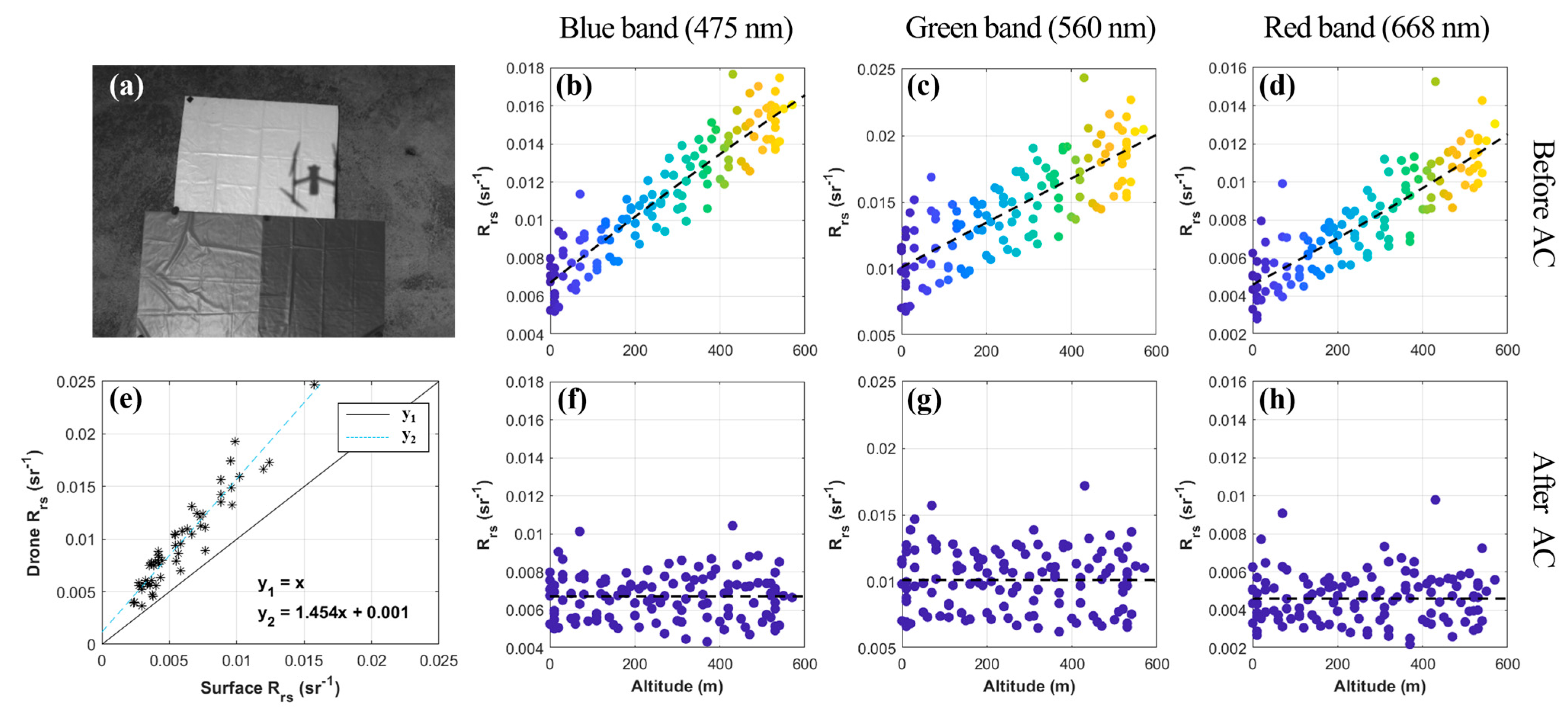
3.2. Atmospheric Correction for UAV Multispectral Images
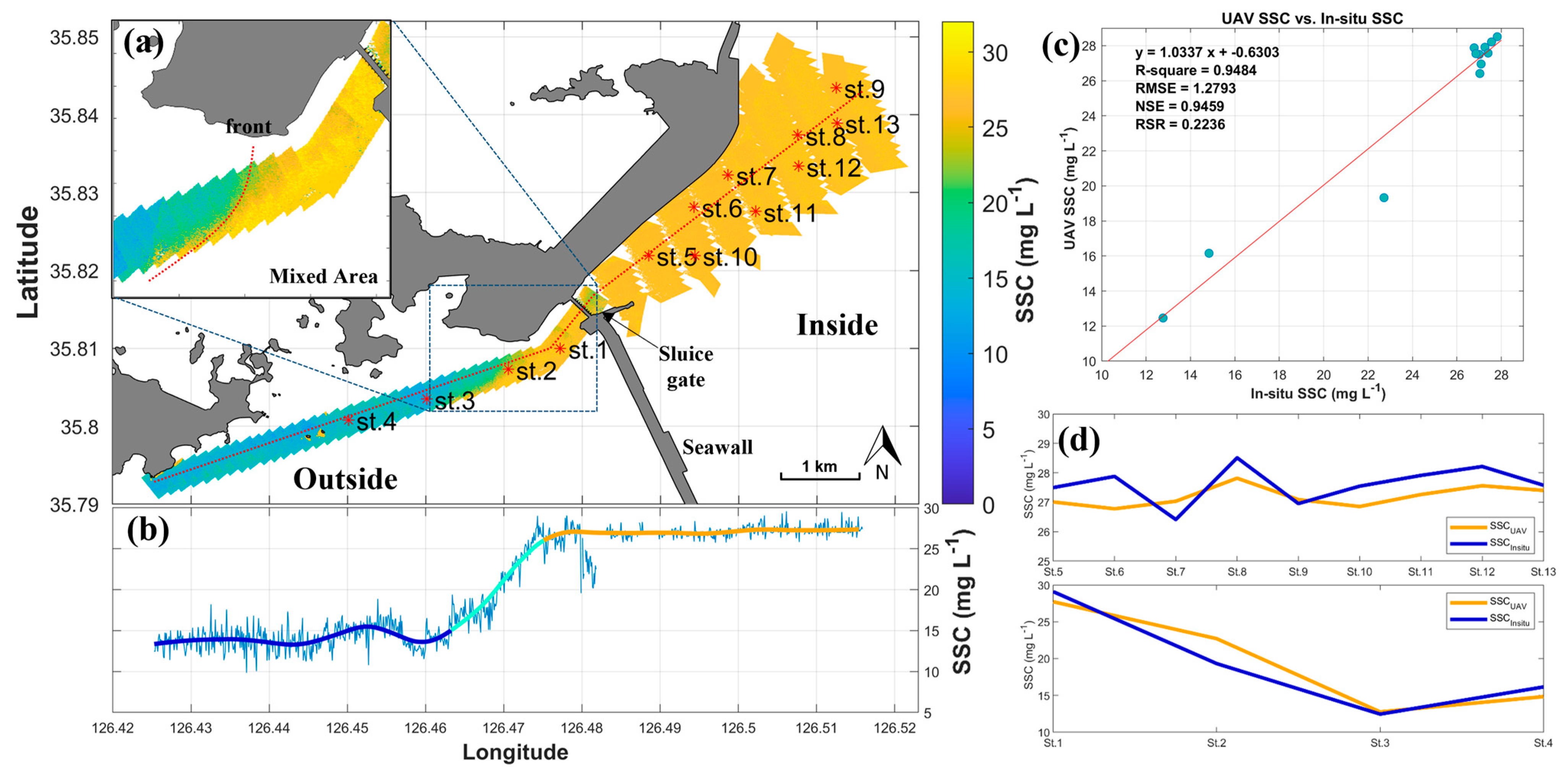
3.3. SSC Mapping through UAVs
4. Discussion
4.1. Atmospheric Correction
4.2. SSC Algorithm
4.3. Geometry of UAV Observation
4.4. Direct Georeferencing
5. Conclusions
- A relative atmospheric correction technique suitable for UAV data can be performed without atmospheric parameters, such as aerosols and water vapor. The change in the reflectance of the tarp with increasing UAV altitude provides integrated information regarding the scattering and reflection effects in the atmosphere. The UAV data were corrected for water surface reflectance using an altitude-reflectance correlation.
- The homogeneity of the water surface makes the triangulation of aerial images impossible. This describes a considerable challenge in processing UAV-based remote sensing data obtained underwater. To overcome this problem, this study proposes a direct georeferencing method that projects aerial images onto the water surface using posture and location information from UAVs and multispectral cameras. This technology produced a wide range of SSC maps and elucidated the behavior of the discharged water from the sluice gate.
- A multispectral-based SSC estimation algorithm was developed using MLR to reflect the dynamic SSC changes in the Saemangeum coastal area. The performance of the algorithm showed reasonable results, with an R2 and RMSE of 0.83 and 4.27 mg L−1, respectively. The application of the SSC algorithm to UAV data enables wide-range SSC monitoring.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dogliotti, A.I.; Ruddick, K.G.; Nechad, B.; Doxaran, D.; Knaeps, E. A single algorithm to retrieve turbidity from remotely-sensed data in all coastal and estuarine waters. Remote Sens. Environ. 2015, 156, 157–168. [Google Scholar] [CrossRef]
- Larson, M.D.; Simic Milas, A.; Vincent, R.K.; Evans, J.E. Multi-depth suspended sediment estimation using high-resolution remote-sensing UAV in Maumee River, Ohio. Int. J. Remote Sens. 2018, 39, 5472–5489. [Google Scholar] [CrossRef]
- Vanacker, V. Suspended Sediment Concentration. In Encyclopedia of Snow, Ice and Glaciers; Springer: Dordrecht, The Netherlands, 2014; pp. 1125–1126. [Google Scholar]
- Dorji, P.; Fearns, P. A quantitative comparison of total suspended sediment algorithms: A case study of the last decade for MODIS and landsat-based sensors. Remote Sens. 2016, 8, 810. [Google Scholar] [CrossRef]
- Pavelsky, T.M.; Smith, L.C. Remote sensing of suspended sediment concentration, flow velocity, and lake recharge in the Peace-Athabasca Delta, Canada. Water Resour. Res. 2009, 45. [Google Scholar] [CrossRef]
- Pereira, L.S.; Andes, L.C.; Cox, A.L.; Ghulam, A. Measuring Suspended-Sediment Concentration and Turbidity in the Middle Mississippi and Lower Missouri Rivers Using Landsat Data. JAWRA J. Am. Water Resour. Assoc. 2018, 54, 440–450. [Google Scholar] [CrossRef]
- Loperfido, J.V. Sustainability of Water Quality. In Comprehensive Water Quality and Purification; Elsevier: Amsterdam, The Netherlands, 2013; pp. 87–105. [Google Scholar]
- Rudorff, N.; Rudorff, C.M.; Kampel, M.; Ortiz, G. Remote sensing monitoring of the impact of a major mining wastewater disaster on the turbidity of the Doce River plume off the eastern Brazilian coast. ISPRS J. Photogramm. Remote Sens. 2018, 145, 349–361. [Google Scholar] [CrossRef]
- Burgan, H.I. The short-term and seasonal trend detection of sediment discharges in Turkish rivers. Rocznik Ochrona Środowiska 2022, 24, 214–230. [Google Scholar] [CrossRef]
- Dethier, E.N.; Renshaw, C.E.; Magilligan, F.J. Toward improved accuracy of remote sensing approaches for quantifying suspended sediment: Implications for suspended-sediment monitoring. J. Geophys. Res. Earth Surf. 2020, 125, e2019JF005033. [Google Scholar] [CrossRef]
- Doxaran, D.; Froidefond, J.M.; Lavender, S.; Castaing, P. Spectral signature of highly turbid waters: Application with SPOT data to quantify suspended particulate matter concentrations. Remote Sens. Environ. 2002, 81, 149–161. [Google Scholar] [CrossRef]
- Hossain, A.K.M.; Mathias, C.; Blanton, R. Remote Sensing of Turbidity in the Tennessee River Using Landsat 8 Satellite. Remote Sens. 2021, 13, 3785. [Google Scholar] [CrossRef]
- Nechad, B.; Ruddick, K.G.; Park, Y. Calibration and validation of a generic multisensor algorithm for mapping of total sus-pended matter in turbid waters. Remote Sens. Environ. 2010, 114, 854–866. [Google Scholar] [CrossRef]
- Van Raaphorst, W.; Philippart, C.J.M.; Smit, J.P.C.; Dijkstra, F.J.; Malschaert, J.F.P. Distribution of suspended particulate matter in the North Sea as inferred from NOAA/AVHRR reflectance images and in situ observations. J. Sea Res. 1998, 39, 197–215. [Google Scholar] [CrossRef]
- Morel, A.; Prieur, L. Analysis of variations in ocean color 1. Limnol. Oceanogr. 1977, 22, 709–722. [Google Scholar] [CrossRef]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar] [CrossRef] [PubMed]
- Min, J.E.; Ryu, J.H.; Lee, S.; Son, S. Monitoring of suspended sediment variation using Landsat and MODIS in the Saemangeum coastal area of Korea. Mar. Pollut. Bull. 2012, 64, 382–390. [Google Scholar] [CrossRef] [PubMed]
- Park, E.; Latrubesse, E.M. Modeling suspended sediment distribution patterns of the Amazon River using MODIS data. Remote Sens. Environ. 2014, 147, 232–242. [Google Scholar] [CrossRef]
- Wang, J.J.; Lu, X.X. Estimation of suspended sediment concentrations using Terra MODIS: An example from the Lower Yangtze River, China. Sci. Total Environ. 2010, 408, 1131–1138. [Google Scholar] [CrossRef]
- Robert, E.; Grippa, M.; Kergoat, L.; Pinet, S.; Gal, L.; Cochonneau, G.; Martinez, J.M. Monitoring water turbidity and surface suspended sediment concentration of the Bagre Reservoir (Burkina Faso) using MODIS and field reflectance data. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 243–251. [Google Scholar] [CrossRef]
- Dorji, P.; Fearns, P.; Broomhall, M. A semi-analytic model for estimating total suspended sediment concentration in turbid coastal waters of northern Western Australia using MODIS-Aqua 250 m data. Remote Sens. 2016, 8, 556. [Google Scholar] [CrossRef]
- Wójcik-Długoborska, K.A.; Bialik, R.J. The Glacial Meltwater Turbidity Algorithm (GaMTA): Adaptation of single-band algorithm retrieving turbidity to satellite and UAV dataset from highly glaciated Antarctic region. Reg. Stud. Mar. Sci. 2023, 58, 102798. [Google Scholar] [CrossRef]
- Klein, K.P.; Lantuit, H.; Heim, B.; Doxaran, D.; Juhls, B.; Nitze, I.; Søreide, J.E. The Arctic Nearshore Turbidity Algorithm (ANTA)-A multi sensor turbidity algorithm for Arctic nearshore environments. Sci. Remote Sens. 2021, 4, 100036. [Google Scholar] [CrossRef]
- Xiao, Y.; Chen, J.; Xu, Y.; Guo, S.; Nie, X.; Guo, Y.; Fu, Y.H. Monitoring of chlorophyll-a and suspended sediment concentrations in optically complex inland rivers using multisource remote sensing measurements. Ecol. Indic. 2023, 155, 111041. [Google Scholar] [CrossRef]
- Windle, A.E.; Silsbe, G.M. Evaluation of unoccupied aircraft system (UAS) remote sensing reflectance retrievals for water quality monitoring in coastal waters. Front. Environ. Sci. 2021, 9, 674247. [Google Scholar] [CrossRef]
- Du, Y.; Lin, H.; He, S.; Wang, D.; Wang, Y.P.; Zhang, J. Tide-Induced Variability and Mechanisms of Surface Suspended Sediment in the Zhoushan Archipelago along the Southeastern Coast of China Based on GOCI Data. Remote Sens. 2021, 13, 929. [Google Scholar] [CrossRef]
- Xu, Y.; Qin, B.; Zhu, G.; Zhang, Y.; Shi, K.; Li, Y.; Shi, Y.; Chen, L. High temporal resolution monitoring of suspended matter changes from GOCI measurements in Lake Taihu. Remote Sens. 2019, 11, 985. [Google Scholar] [CrossRef]
- Hu, Y.; Yu, Z.; Zhou, B.; Li, Y.; Yin, S.; He, X.; Peng, X.; Shum, C.K. Tidal-driven variation of suspended sediment in Hangzhou Bay based on GOCI data. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101920. [Google Scholar] [CrossRef]
- Chau, P.M.; Wang, C.K.; Huang, A.T. The spatial-temporal distribution of GOCI-derived suspended sediment in Taiwan coastal water induced by typhoon Soudelor. Remote Sens. 2021, 13, 194. [Google Scholar] [CrossRef]
- Kwon, Y.S.; Pyo, J.; Kwon, Y.H.; Duan, H.; Cho, K.H.; Park, Y. Drone-based hyperspectral remote sensing of cyanobacteria using vertical cumulative pigment concentration in a deep reservoir. Remote Sens. Environ. 2020, 236, 111517. [Google Scholar] [CrossRef]
- Shang, S.; Lee, Z.; Lin, G.; Hu, C.; Shi, L.; Zhang, Y.; Li, X.; Wu, J.; Yan, J. Sensing an intense phytoplankton bloom in the western Taiwan Strait from radiometric measurements on a UAV. Remote Sens. Environ. 2017, 198, 85–94. [Google Scholar] [CrossRef]
- Baek, J.Y.; Jo, Y.H.; Kim, W.; Lee, J.S.; Jung, D.; Kim, D.W.; Nam, J. A new algorithm to estimate chlorophyll-a concentrations in turbid yellow sea water using a multispectral sensor in a low-altitude remote sensing system. Remote Sens. 2019, 11, 2257. [Google Scholar] [CrossRef]
- Cui, M.; Sun, Y.; Huang, C.; Li, M. Water Turbidity Retrieval Based on UAV Hyperspectral Remote Sensing. Water 2022, 14, 128. [Google Scholar] [CrossRef]
- McEliece, R.; Hinz, S.; Guarini, J.M.; Coston-Guarini, J. Evaluation of nearshore and offshore water quality assessment using UAV multispectral imagery. Remote Sens. 2020, 12, 2258. [Google Scholar] [CrossRef]
- Su, T.C. A study of a matching pixel by pixel (MPP) algorithm to establish an empirical model of water quality mapping, as based on unmanned aerial vehicle (UAV) images. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 213–224. [Google Scholar] [CrossRef]
- Ying, H.; Xia, K.; Huang, X.; Feng, H.; Yang, Y.; Du, X.; Huang, L. Evaluation of water quality based on UAV images and the IMP-MPP algorithm. Ecol. Inform. 2021, 61, 101239. [Google Scholar] [CrossRef]
- An, S.M.; Lee, J.H.; Woo, H.J.; Koo, B.J.; Lee, H.G.; Yoo, J.W.; Je, J.G. Benthic environment and macrofaunal community changes during the dike construction in Saemangeum subtidal area, Korea. Ocean Polar Res. 2006, 28, 369–383. [Google Scholar]
- Kim, D.; Jo, J.; Kim, B.; Ryu, J.; Choi, K. Influence of dike-induced morphologic and sedimentologic changes on the benthic ecosystem in the sheltered tidal flats, Saemangeum area, west coast of Korea. Environ. Pollut. 2020, 257, 113507. [Google Scholar] [CrossRef]
- Kim, D.; Ko, J.; Jo, J.; Ryu, J.; Choi, K. Decoupling natural and man-made impacts on the morphologic and sedimentologic changes in the tidal flats, Saemangeum area, west coast of Korea: Implications for benthic ecosystem stability. Sci. Total Environ. 2022, 807, 151779. [Google Scholar] [CrossRef]
- Lee, S.H.; Choi, H.Y.; Son, Y.T.; Kwon, H.K.; Kim, Y.K.; Yang, J.S.; Jeong, H.J.; Kim, J.G. Low-salinity water and circulation in summer around Saemangeum area in the west coast of Korea. Sea-J. Kor. Soc. Ocean. 2003, 8, 138–150. [Google Scholar]
- Lee, Y.K.; Ryu, J.H.; Choi, J.K.; Lee, S.; Woo, H.J. Satellite-based observations of unexpected coastal changes due to the Sae-mangeum Dyke construction, Korea. Mar. Pollut. Bull. 2015, 97, 150–159. [Google Scholar] [CrossRef]
- Lim, D.I.; Kang, M.R.; Jang, P.G.; Kim, S.Y.; Jung, H.S.; Kang, Y.S.; Kang, Y.S. Water quality characteristics along mid-western coastal area of Korea. Ocean Polar Res. 2008, 30, 379–399. [Google Scholar] [CrossRef]
- Min, J.E.; Ahn, Y.H.; Lee, K.S.; Ryu, J.H. Development of Suspended Sediment Algorithm for Landsat TM/ETM+ in Coastal Sea Waters-A Case Study in Saemangeum Area. Korean J. Remote Sens. 2006, 22, 87–99. [Google Scholar]
- RedEdge-MX Integration Guide. Available online: https://support.micasense.com/hc/en-us/articles/360011389334-RedEdge-MX-Integration-Guide (accessed on 27 January 2023).
- Hyperspectral Radiance and Irradiance Sensors for the UV, VIS or UV/VIS range. Available online: https://www.trios.de/en/ramses.html (accessed on 27 January 2023).
- Kim, W.; Roh, S.H.; Moon, Y.; Jung, S. Evaluation of Rededge-M camera for water color observation after Image preprocessing. Journal of the Korean Society of Surveying, Geodesy. Photogramm. Cartogr. 2019, 37, 167–175. [Google Scholar]
- Radiometric Calibration Model for MicaSense Sensors. Available online: https://support.micasense.com/hc/en-us/articles/115000351194-Radiometric-Calibration-Model-for-MicaSense-Sensors (accessed on 27 January 2023).
- Lee, Z.; Ahn, Y.H.; Mobley, C.; Arnone, R. Removal of surface-reflected light for the measurement of remote-sensing reflec-tance from an above-surface platform. Opt. Express 2010, 18, 26313–26324. [Google Scholar] [CrossRef]
- Schläpfer, D.; Popp, C.; Richter, R. Drone data atmospheric correction concept for multi-and hyper-spectral imagery–the droacor model. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 473–478. [Google Scholar] [CrossRef]
- Yu, X.; Liu, Q.; Liu, X.; Liu, X.; Wang, Y. A physical-based atmospheric correction algorithm of unmanned aerial vehicles images and its utility analysis. Int. J. Remote Sens. 2017, 38, 3101–3112. [Google Scholar] [CrossRef]
- Jeong, J.C. Distribution of Surface Temperature and Chlorophyll-a in Lake Soyang using Remote Sensing Techniques. J. Environ. Impact Assess. 2000, 9, 177–183. [Google Scholar]
- Minařík, R.; Langhammer, J.; Hanuš, J. Radiometric and atmospheric corrections of multispectral μMCA camera for UAV spectroscopy. Remote Sens. 2019, 11, 2428. [Google Scholar] [CrossRef]
- Jeon, E.I.; Kim, K.; Cho, S.; Kim, S. A Comparative Study of Absolute Radiometric Correction Methods for Drone-borne Hyperspectral Imagery. Korean J. Remote Sens. 2019, 35, 203–215. [Google Scholar]
- Aasen, H.; Bolten, A. Multi-temporal high-resolution imaging spectroscopy with hyperspectral 2D imagers–From theory to application. Remote Sens. Environ. 2018, 205, 374–389. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Number of Observations | Field Observation (on the Ship) | UAV Observation | ||||
|---|---|---|---|---|---|---|---|
| RedEdge | RAMSES | Water Sampling (SSC) | RedEdge | ||||
| 20 April 2018 | 11 sampling points | O | O | O | O | ||
| 29 May 2018 | 11 sampling points | O | O | O | O | ||
| 22 August 2018 | 12 sampling points | O | O | O | O | ||
| 24 October 2018 | 17 sampling points | O | O | O | - | ||
| 25 October 2018 | 16 sampling points | O | O | O | - | ||
| 15 July 2019 | 11 sampling points | O | - | O | O | ||
| 4 August 2020 | 12 sampling points | O | O | O | O | ||
| 17 November 2020 | 3 sampling points | O | O | O | O | ||
| 18 November 2020 | 7 sampling points | O | O | O | O | ||
| Statistical Characteristics of Field Observed SSC | |||||||
| Skewness | Coefficient of Variation | Min | Max | Median | Mean | Confidence Intervals 95% (Lower) | Confidence Intervals 95% (Upper) |
| 1.01 | 0.74 | 2.02 | 36.43 | 8.62 | 13.23 | 10.584 | 15.878 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.-S.; Baek, J.-Y.; Shin, J.; Kim, J.-S.; Jo, Y.-H. Suspended Sediment Concentration Estimation along Turbid Water Outflow Using a Multispectral Camera on an Unmanned Aerial Vehicle. Remote Sens. 2023, 15, 5540. https://doi.org/10.3390/rs15235540
Lee J-S, Baek J-Y, Shin J, Kim J-S, Jo Y-H. Suspended Sediment Concentration Estimation along Turbid Water Outflow Using a Multispectral Camera on an Unmanned Aerial Vehicle. Remote Sensing. 2023; 15(23):5540. https://doi.org/10.3390/rs15235540
Chicago/Turabian StyleLee, Jong-Seok, Ji-Yeon Baek, Jisun Shin, Jae-Seong Kim, and Young-Heon Jo. 2023. "Suspended Sediment Concentration Estimation along Turbid Water Outflow Using a Multispectral Camera on an Unmanned Aerial Vehicle" Remote Sensing 15, no. 23: 5540. https://doi.org/10.3390/rs15235540
APA StyleLee, J.-S., Baek, J.-Y., Shin, J., Kim, J.-S., & Jo, Y.-H. (2023). Suspended Sediment Concentration Estimation along Turbid Water Outflow Using a Multispectral Camera on an Unmanned Aerial Vehicle. Remote Sensing, 15(23), 5540. https://doi.org/10.3390/rs15235540