In the following section, the experiments on simulated and synthetic data for the GBSAR system are introduced.
4.1. Simulated Data
Here, we conducted multiple simulation experiments on moving targets to verify the efficacy of the algorithm proposed in the third section. The specific parameters of the GBSAR system are reported in
Table 1.
The center frequency of the GBSAR system is 17 GHz. The speed of the platform is 0.03 m/s. Here, we use 3000 m as the maximum illuminating range. The motion parameters and the positions of the targets are shown in
Table 2. Five moving targets are simulated and the stationary point target S1 is used for reference.
When
, moving target T1 has the 2D velocity with
2 m/s and
5 m/s. And it is located at (2300, 100). The positions of T2 and T3 are (2400 m, 0 m) and (2500 m, 500 m), respectively. The velocities of them are
0 m/s and
10 m/s. The moving targets T4 and T5 are located at (2600, 0) and (2800, 600), respectively, and the velocities of them are
10 m/s and
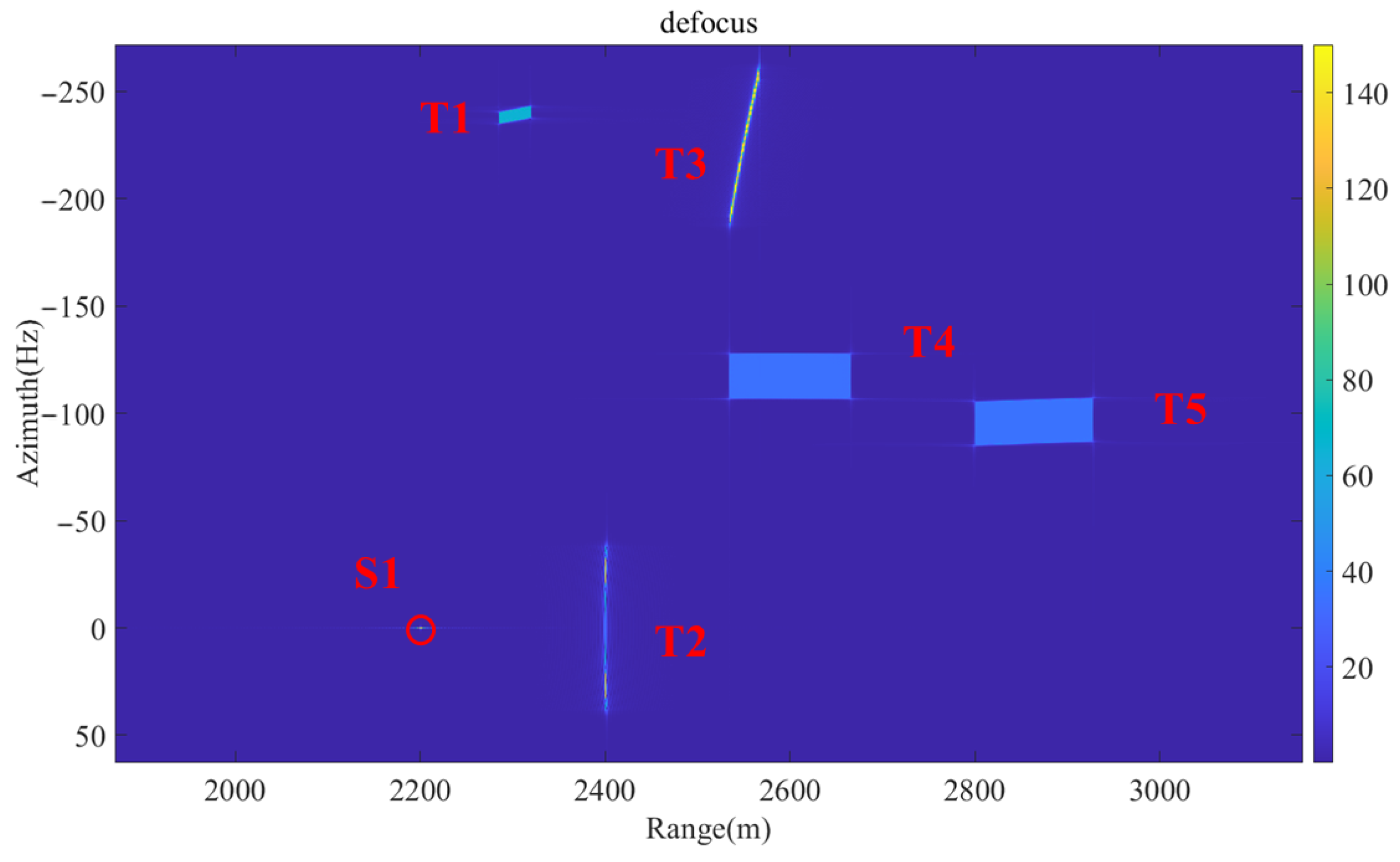
0 m/s. The coordinates of S1 in the scene are (2200 m, 0). As can be seen from
Figure 6, after GBSAR imaging, S1 is well focused. Due to the influence of velocity, the moving targets are defocused and displaced.
Next, T1 is selected as the example for detection, while its detection process is analyzed and evaluated. In this experiment, was searched by traversal and 2D enlightend search, respectively.
First, we use the traversal method to search the parameters of T1. To search the optimal parameter of
, we conduct a cyclic search ranging from −6 m/s to 6 m/s with a step size of 0.1 m/s. Similarly, for parameter
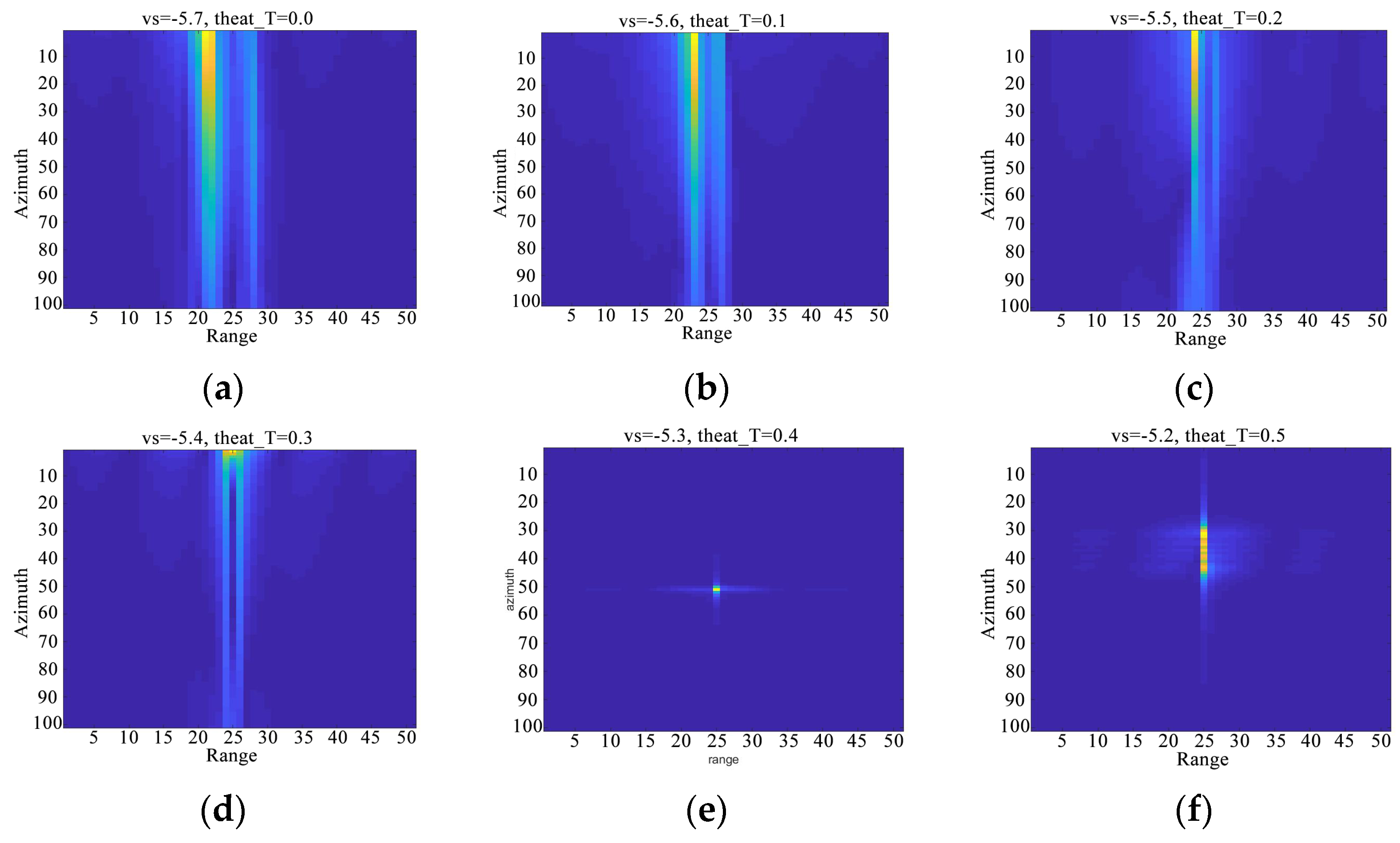
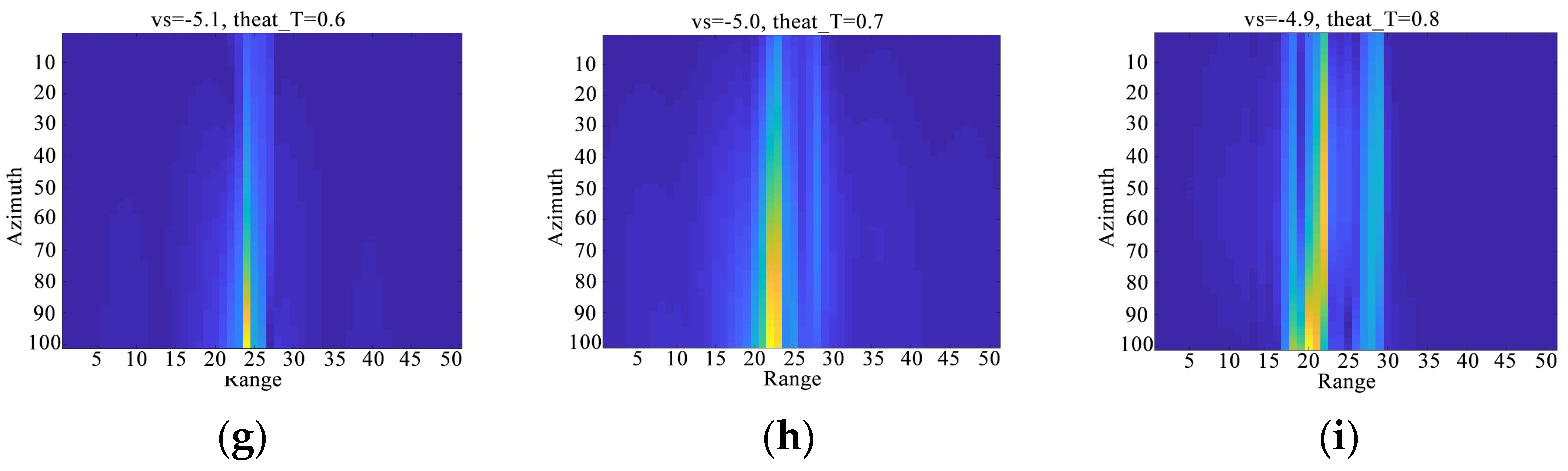
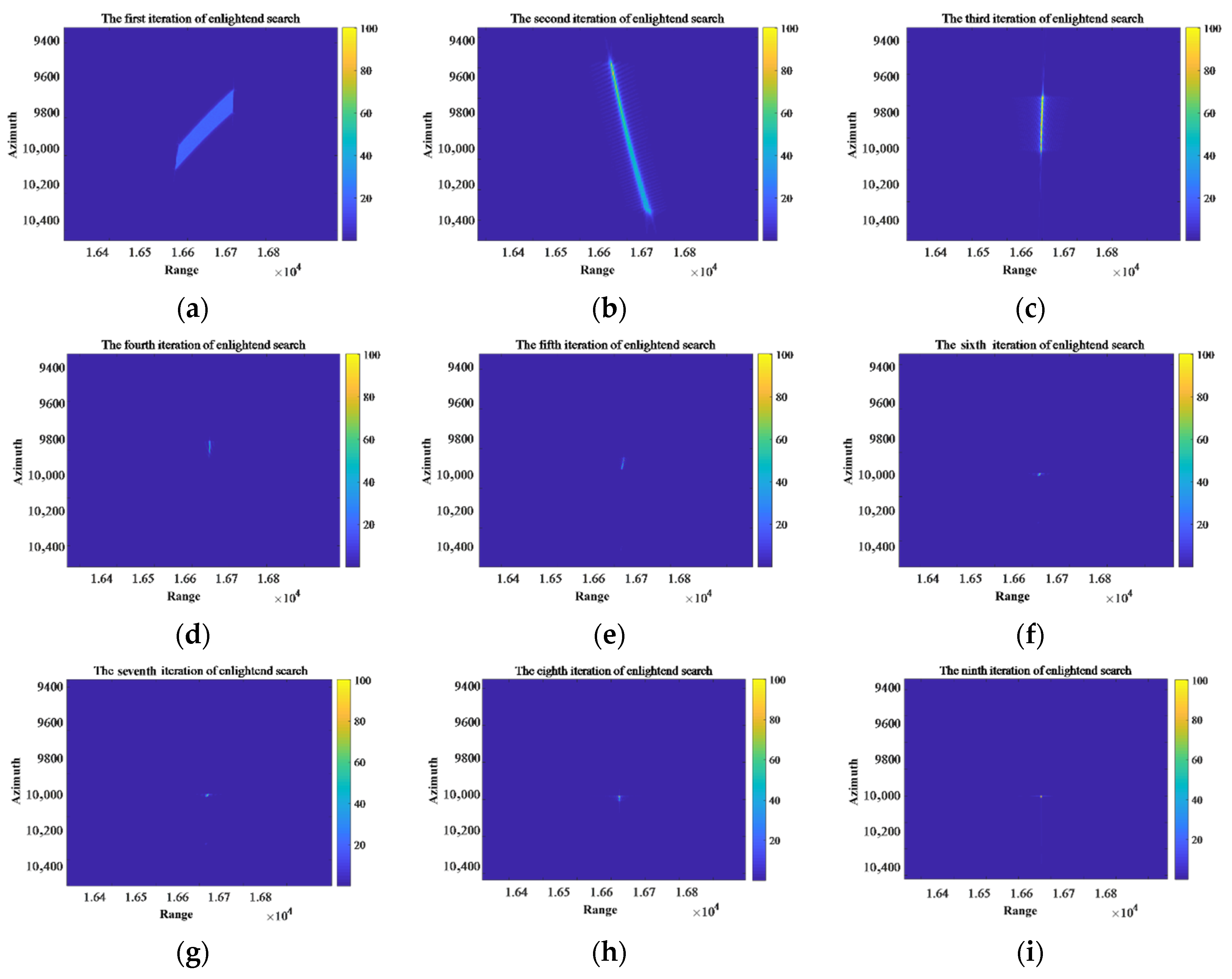
, we perform a cyclic search from −6° to 6° with a step size of 0.1°. The refocusing results for different parameters during the search process are shown in
Figure 7. Subfigures (a–i) are the images under different sets of
. The entropy of the image under different parameters is calculated, and the optimal parameters
that achieve refocusing of the moving target are confirmed by the minimum entropy principle.
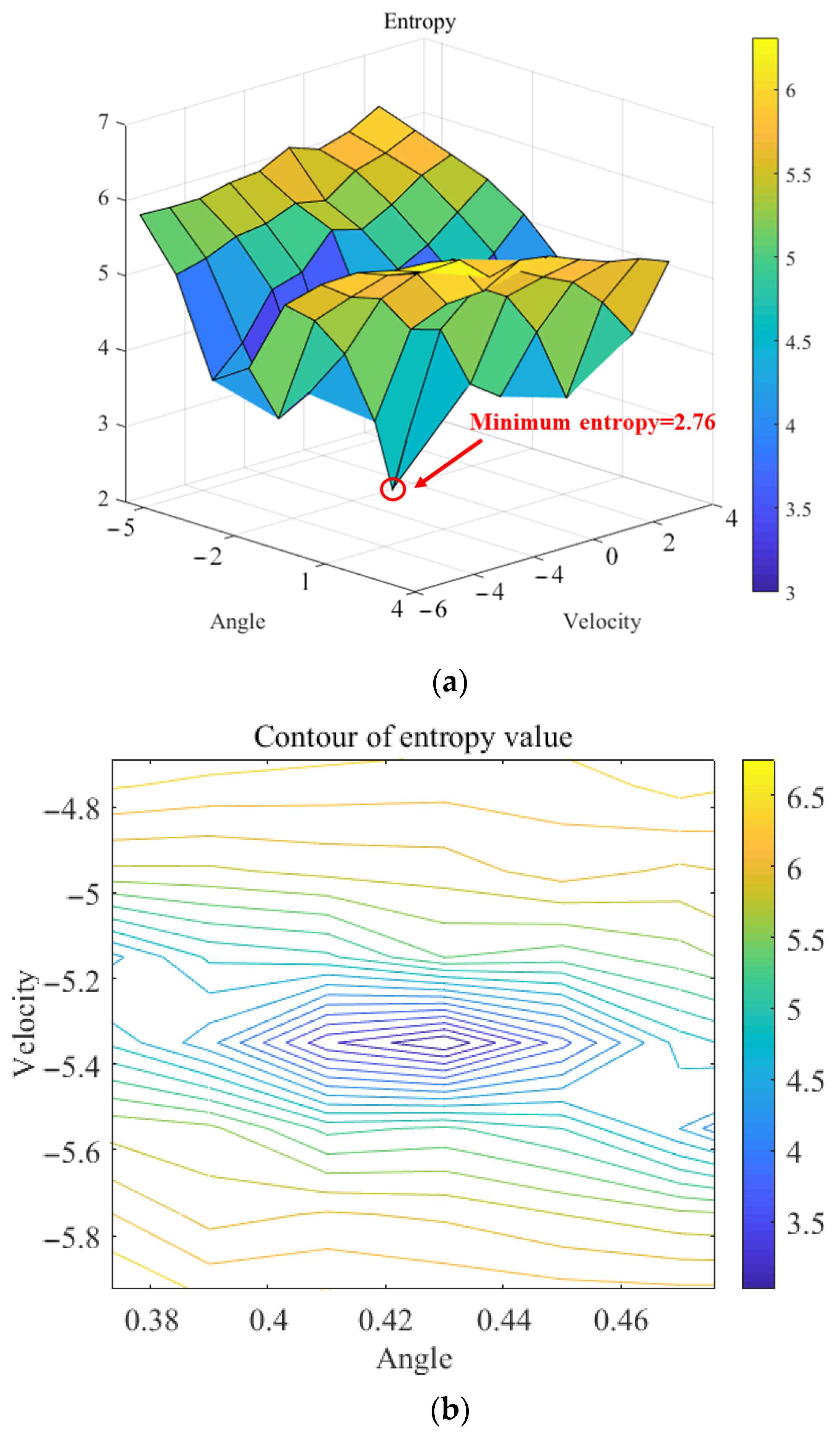
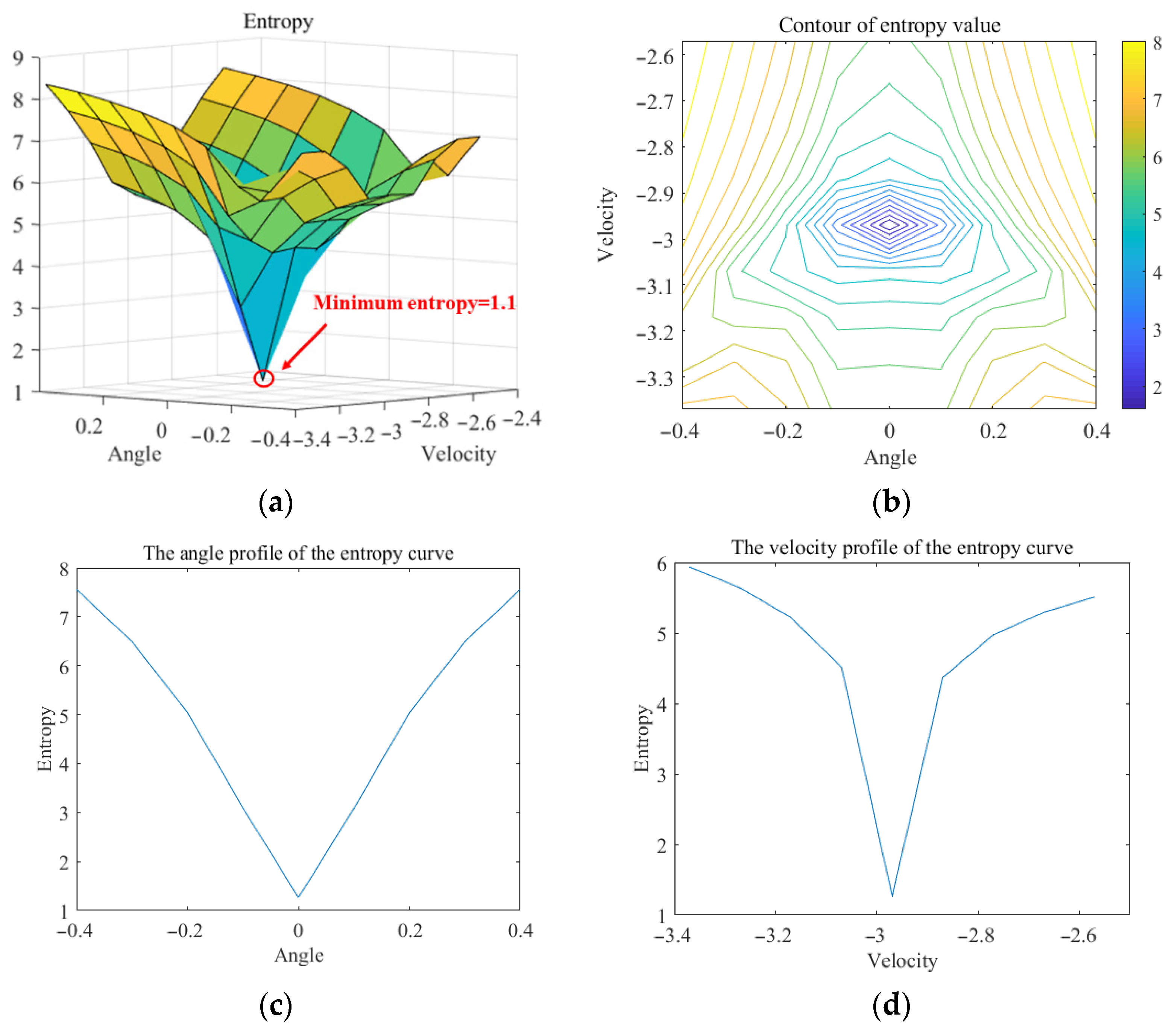
Figure 8 shows the entropy curves of T1 refocused images under different 2D parameters. The parameters corresponding to the minimum entropy value in the figure closely approximate the actual motion parameters of target T1.
Figure 9 and
Figure 10 show the angle and velocity profiles of the entropy curve, respectively.
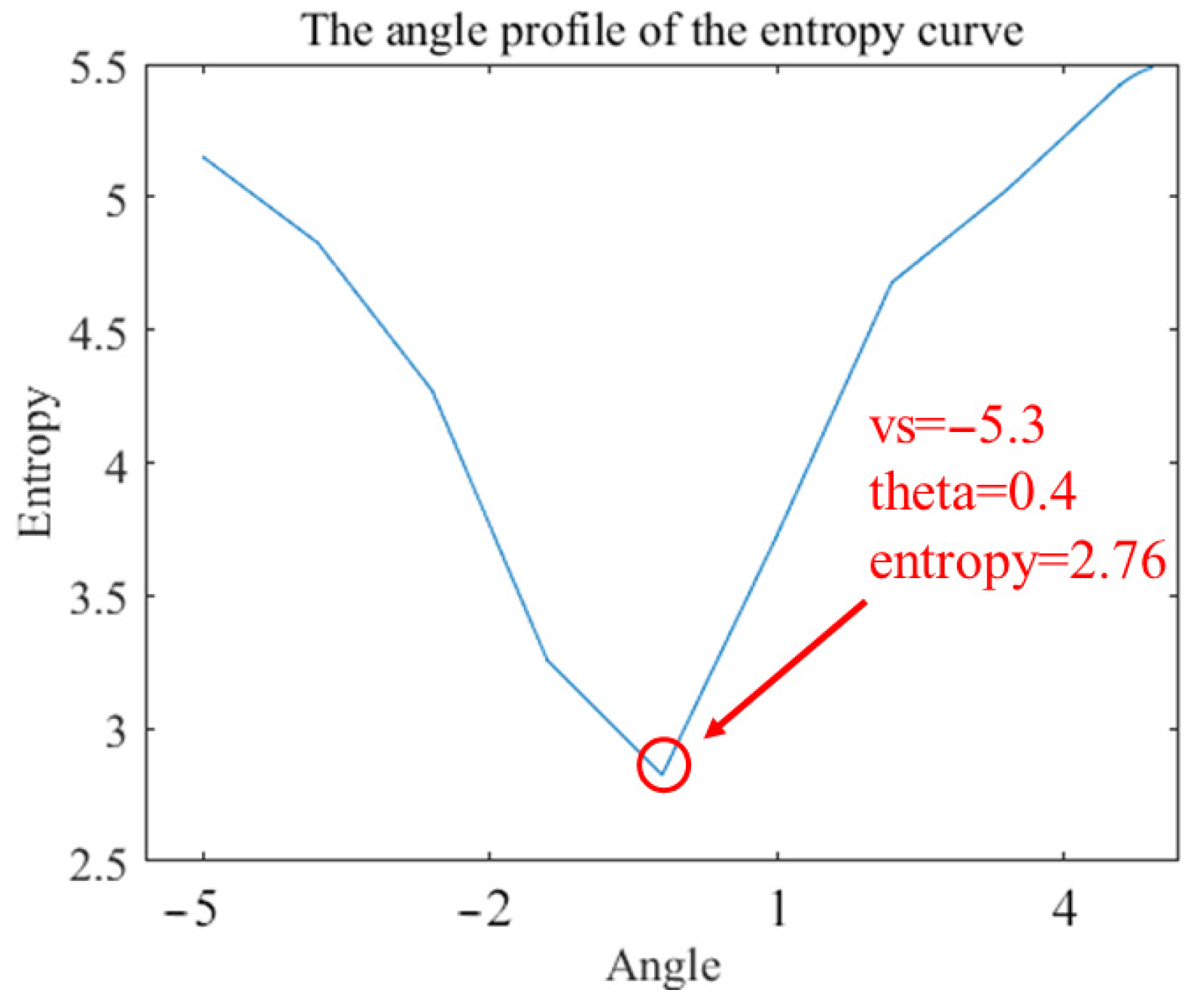
Figure 9 is the result of the angle profile. This profile can reflect the relationship between the image’s entropy and its angle during the parameter search process. It can be seen that when the angle is 0.4°, the entropy of the refocused image reaches its minimum value.
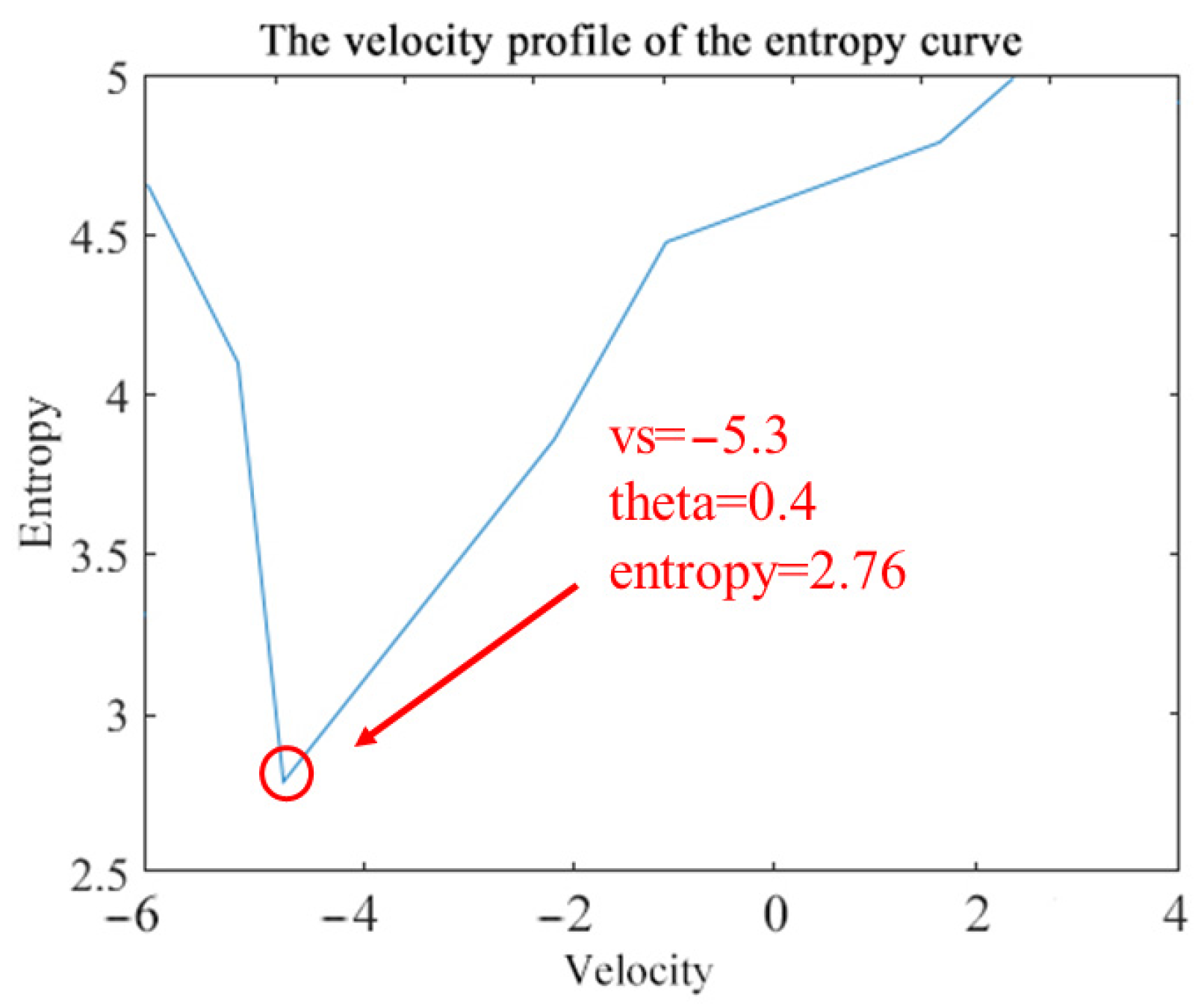
Figure 10 is the result of the velocity profile. This profile demonstrates the relationship between the image entropy and the velocity during the parameter search process. This figure clearly illustrates that the minimum value of the entropy for the refocused image is achieved at a velocity of −5.3 m/s. It can be observed from
Figure 9 and
Figure 10 that when the parameters
= −5.3 m/s and
= 0.4° are used to refocus T1, the refocusing image reaches the minimum entropy value of 2.76.
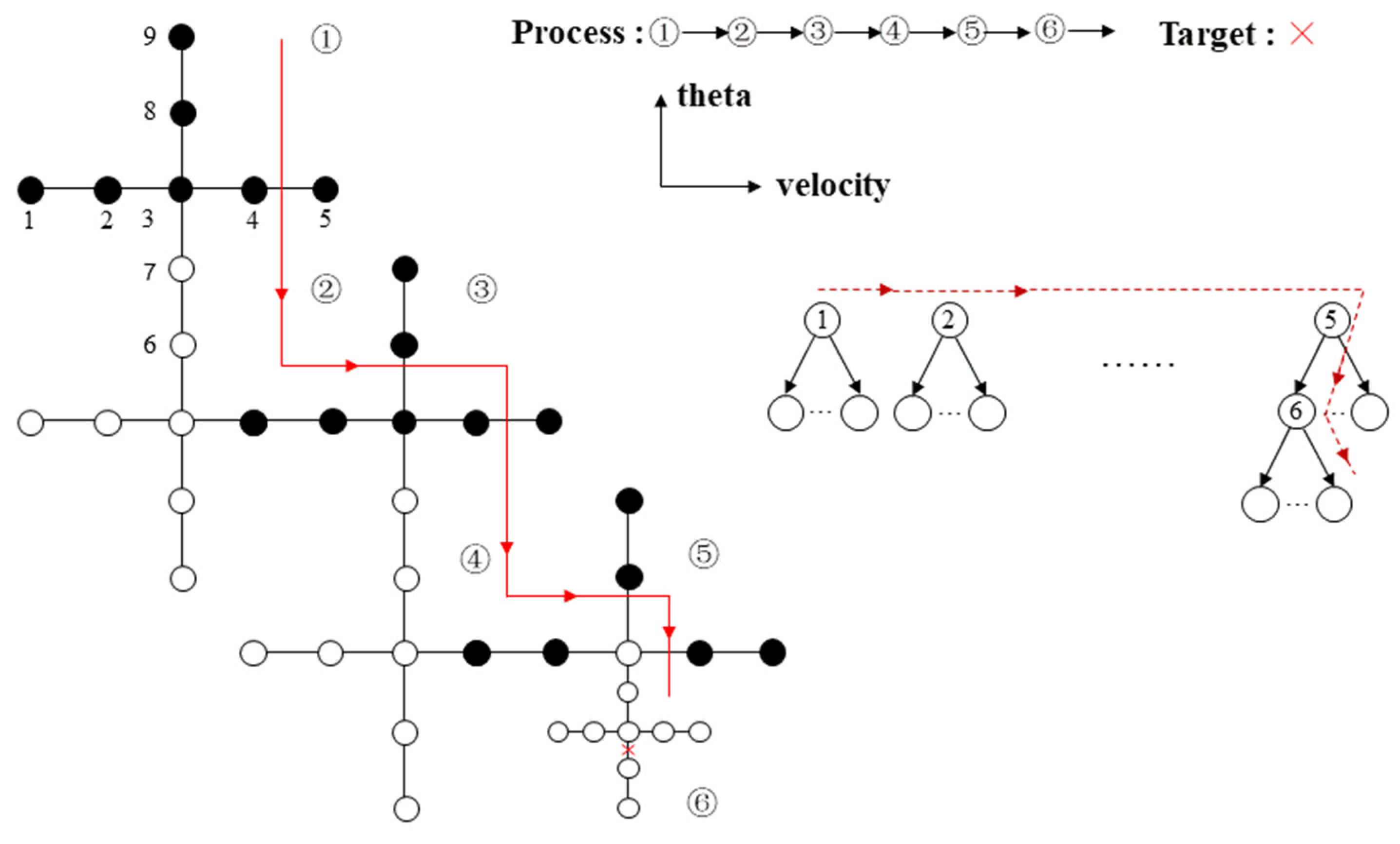
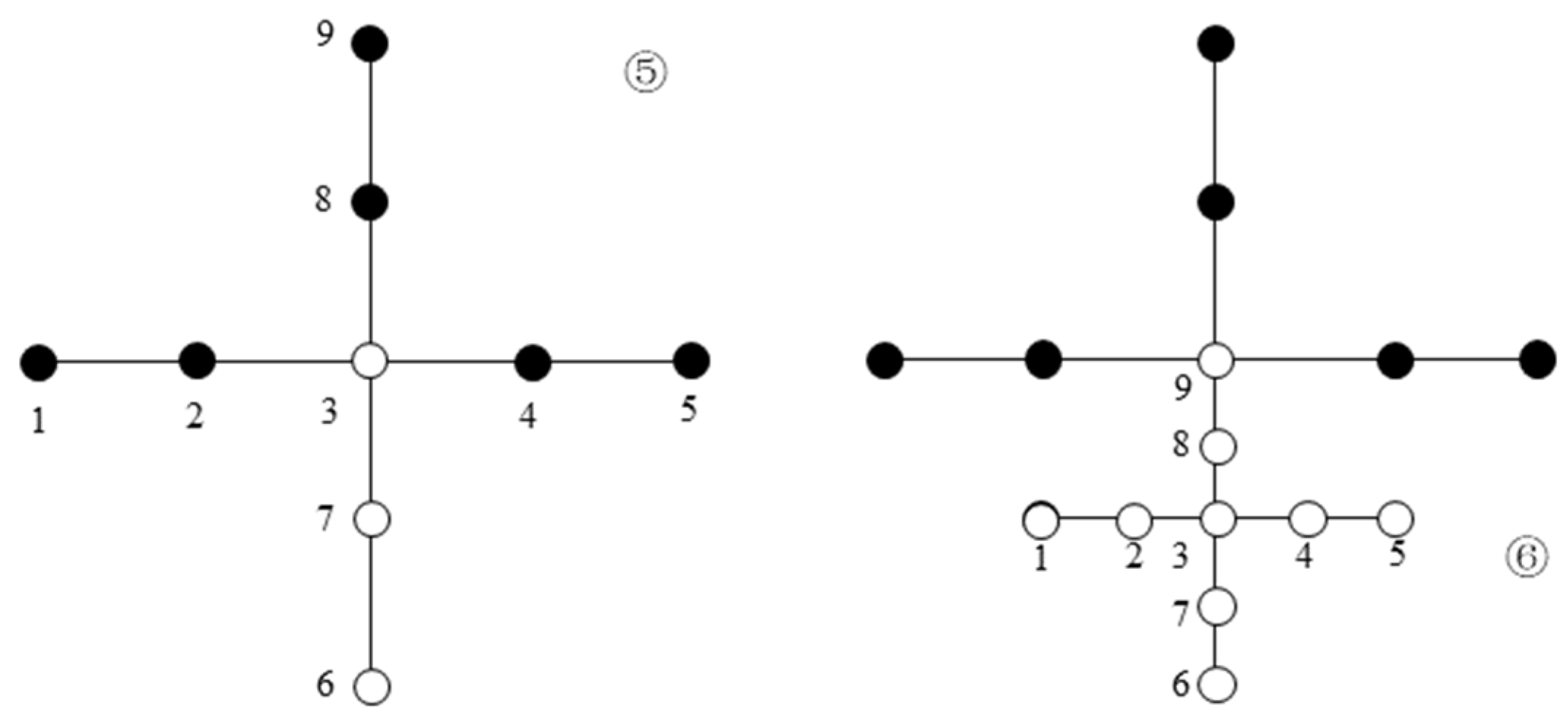
Next, the enlightend search is used to search the parameters of T1. According to the platform velocity of this simulation, we set the initial node at (0, 0.03). The 2D parameter space is established for searching with 2 m/s and 0.1 ° as the step sizes of the velocity dimension and angle dimension, respectively. It is worth mentioning that the search strategies of the traversal method and the 2D enlightend search are different. The traversal method always maintains a fixed step size to indiscriminately search for and . For the enlightend search, the node with a minimum entropy is always located at the interior of the “cross.” In order to search in depth, the search step size will be halved as the number of iterations increases. Therefore, the search step size is not the reference for comparing the convergence time between the two methods. In this study, the computational efficiency of the two methods is judged through the comparison of the time spent searching for similar optimal values in the range of allowable error.
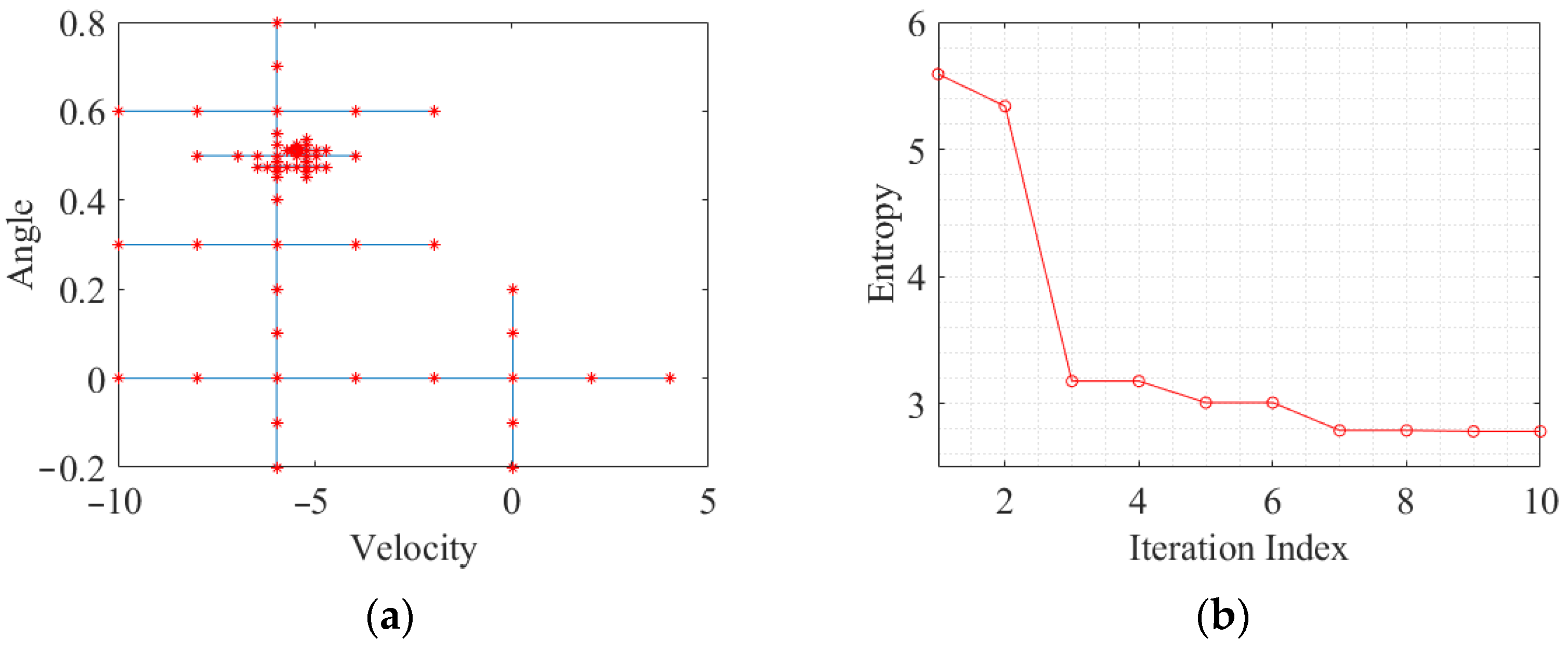
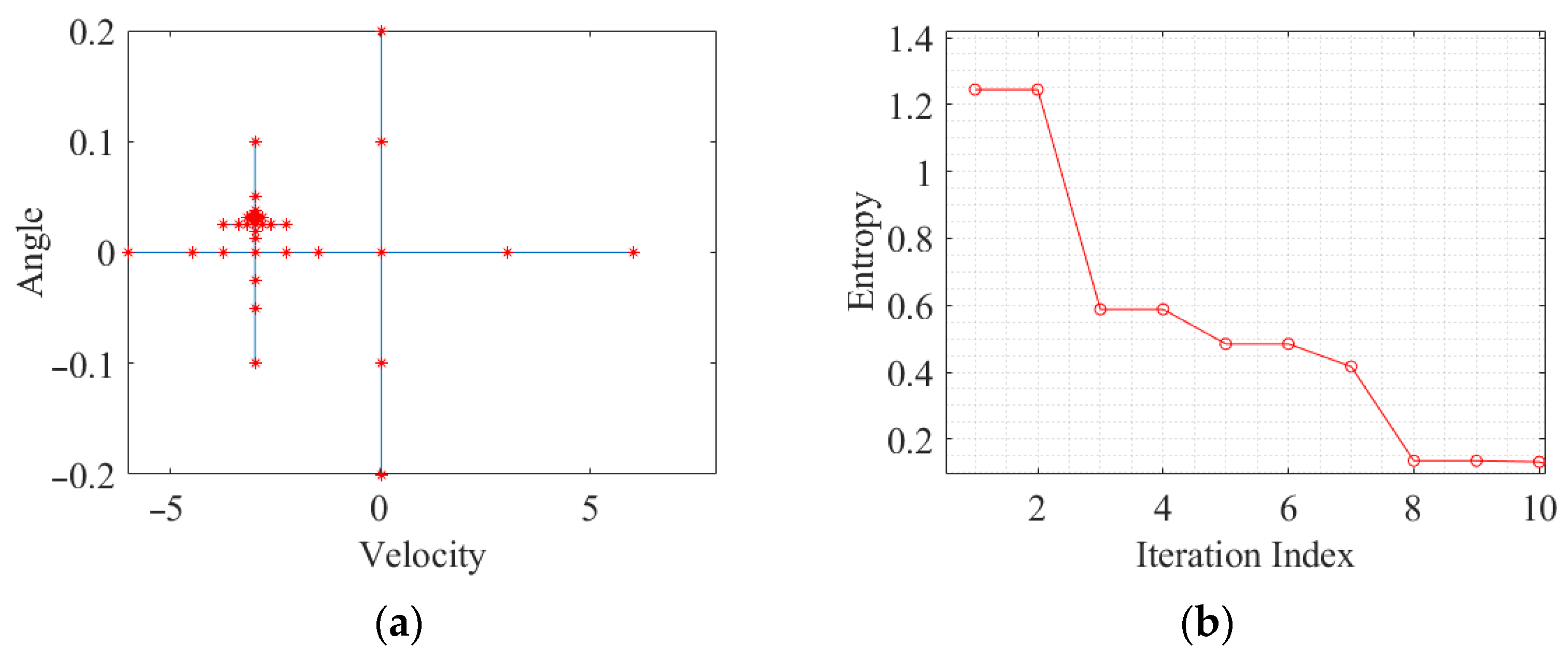
The process of parameter searching for T1 is shown in
Figure 11a. The different nodes in the search “cross” are represented by red “*”. The relationship between the number of searches and the refocused image entropy is shown in
Figure 11b. The circles represent the minimum entropy value after each iteration. It is evident that the greater the number of searches, the smaller the entropy. Furthermore, only the parameters of the first three searches in the parameter space have the greatest impact on the image entropy, while the other parameters have little effect on entropy, which leads to the convergence of the entropy. Because in the first three iterations, the optimal parameters are searched in breadth by using the larger search step size. The breadth search is to determine the approximate range of the optimal parameters in the 2D parameter space. Then, according to the range, the parameter values are searched accurately by halving the step size.
When the two-dimensional parameter is = −5.47 m/s and = 0.513°, the entropy value of the refocusing image reaches its minimum. The minimum entropy value is 2.65.
The theoretical value and the search results under each iteration of T1 are shown in
Table 3. The refocusing results of moving target T1 under nine iterations are shown in
Figure 12. Due to the utilization of a larger search step size in the first three iterations, there is a deviation between the results of the first three iterations and the theoretical optimal parameter values. When the first three sets of parameters are used to refocus the moving target, the point target still remains in the defocused state. Therefore, it can be observed from the entropy curve that the entropy of the moving target image has a significant variation during the first three iterations. With the increase in the number of iterations, the search step is gradually halved, and then the optimal parameters are searched in depth. This process makes the searched results match closely with the theoretical values, thereby leading to small variations observed on the entropy curve.
Table 4 reports the final searching results and computing time of two different methods. As shown in the table, it takes 8150 s for the traditional traversal search to get the optimal value, and the computational efficiency of this method is much lower than that of enlightend search. The accuracy of the optimal value obtained by traversal is slightly higher than enlightend search.
The enlightend search only takes 21.6 s to converge to the optimal value. In order to enhance the search efficiency, the maximum driving speed within the scene can be used as a priori information during the search process. The parameter is searched in depth directly by establishing the original “cross,” including the node corresponding to the optimal value. Similar to references [
36,
38], this study selected 0.001 as the threshold of the enlightend search. With a reduction in the search step from the initial step 1 to 0.001, the enlightend search only needs
iterations via the priori information. Therefore, the introduction of the enlightend search greatly reduces the computational workload and can achieve fast detection of moving targets in GBSAR imagery.
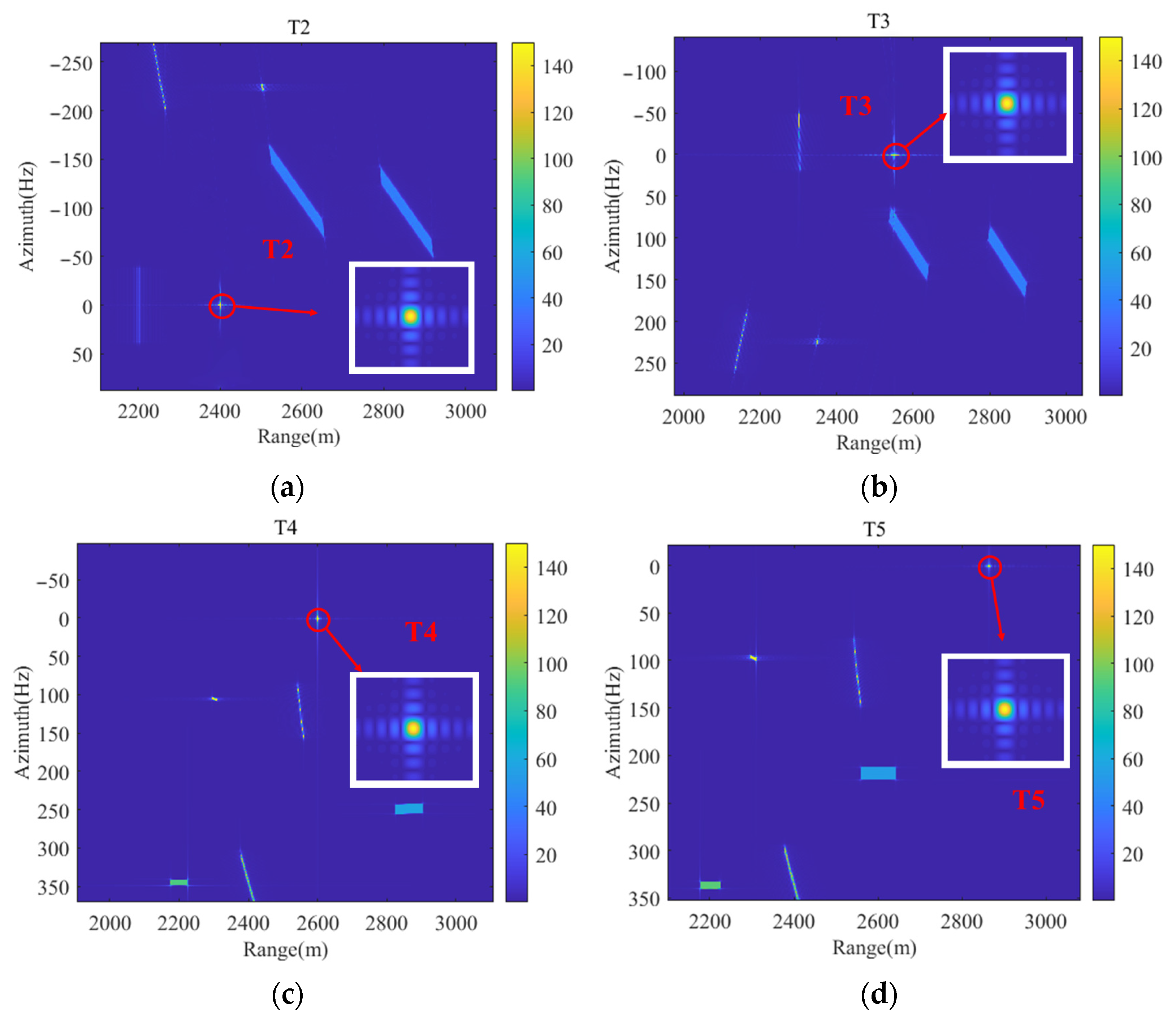
By using the identical method to detect the other moving targets, we can get the refocusing results in
Figure 13.
4.2. Synthetic Data
Here, a synthetic data experiment is conducted by combining real data acquired in mine with simulated moving target echo. The NCUT-RiskRadar GBSAR system is used to collect the real data.
Figure 14 is the GBSAR system researched by NCUT. The system parameters employed in the experiment are consistent with the values presented in
Table 1. We simulate four moving targets A1, A2, A3 and A4, and their parameters are shown in
Table 5.
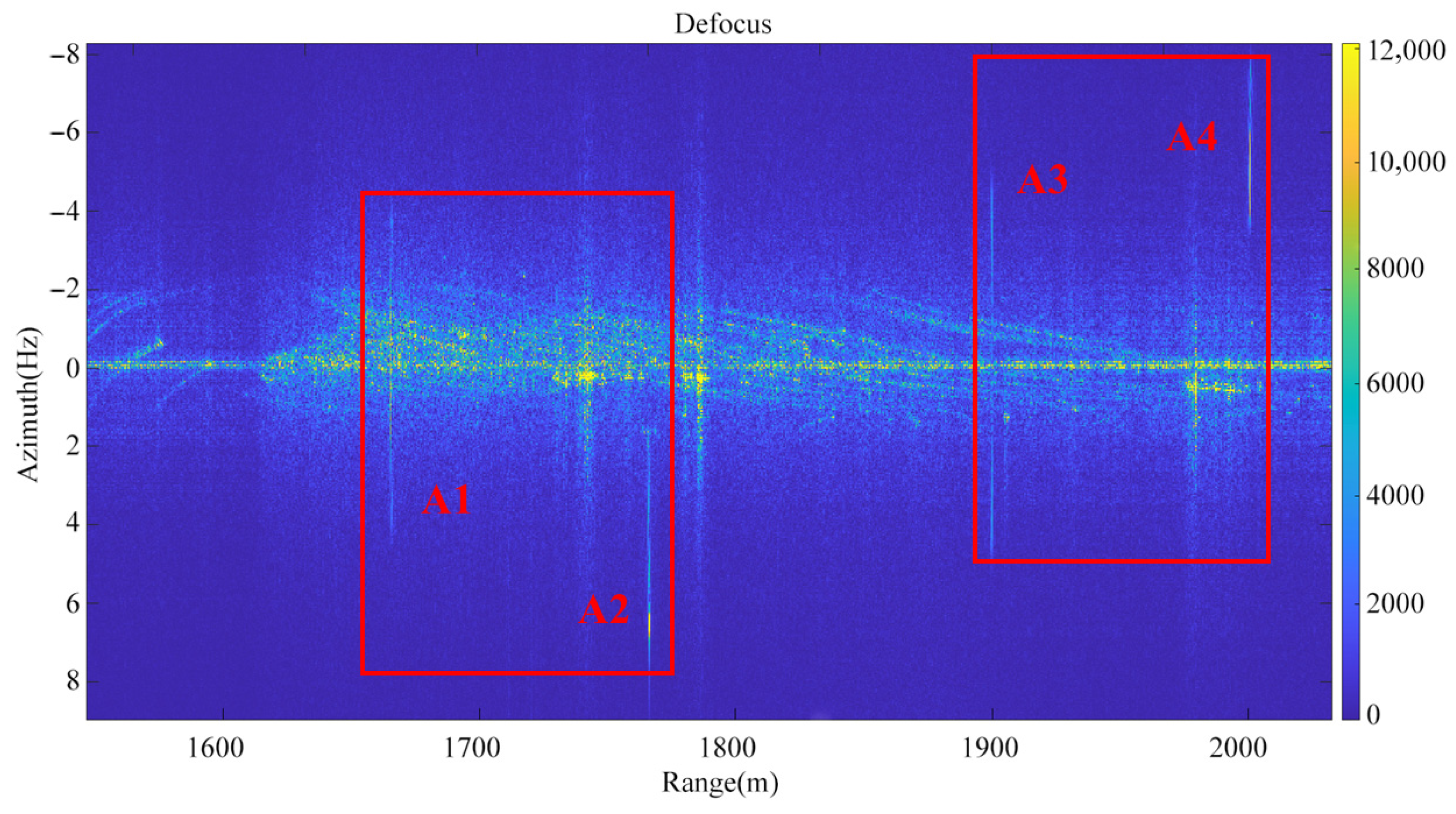
Figure 15 shows the conventional image of the synthetic data. It can be seen that the stationary mining area is well focused and is located in the middle. The moving targets are defocused and marked on both sides of the scene through the red box.
Table 6 shows the searching results and computing time of four moving targets with two different methods. As can be seen from the table, the introduction of enlightend search improves the efficiency of moving target detection in the GBSAR system.
Next, let us take the targets on the right side as an example for analysis. The entropy value curve of A3 by traversal search is shown in
Figure 16. When
= −2.97 m/s and
= 0° are selected as the refocusing parameters, the refocused image entropy of A3 reaches its minimum.
The process of using enlightend search to find the optimal parameter for A3 is shown in
Figure 17a. The different nodes in the search “cross” are represented by red “*”. The relationship between the number of iterations and the 2D entropy is shown in
Figure 17b. The circles represent the minimum entropy value after each iteration. A clear trend can be observed, where the entropy value decreases as the number of iterations increases. And the minimum entropy finally converges to
= −3.01 m/s,
= 0.03°.
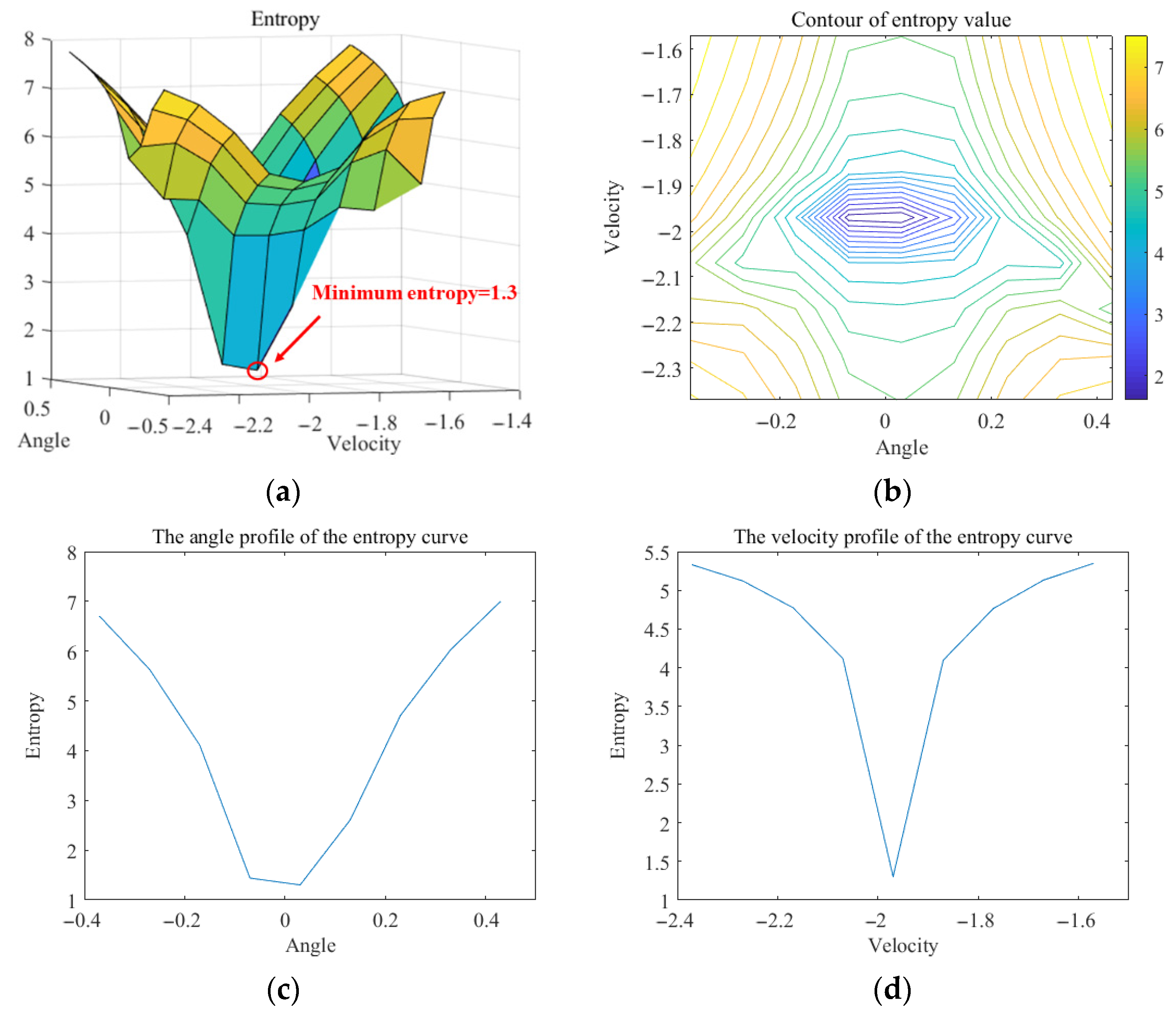
The relationship between the image entropy value of A4 and the 2D parameters based on traversal search is depicted in
Figure 18. The figure clearly demonstrates that when
= −1.97 m/s and
= 0.05° are used for refocusing, the refocused image entropy of A4 reaches the minimum.
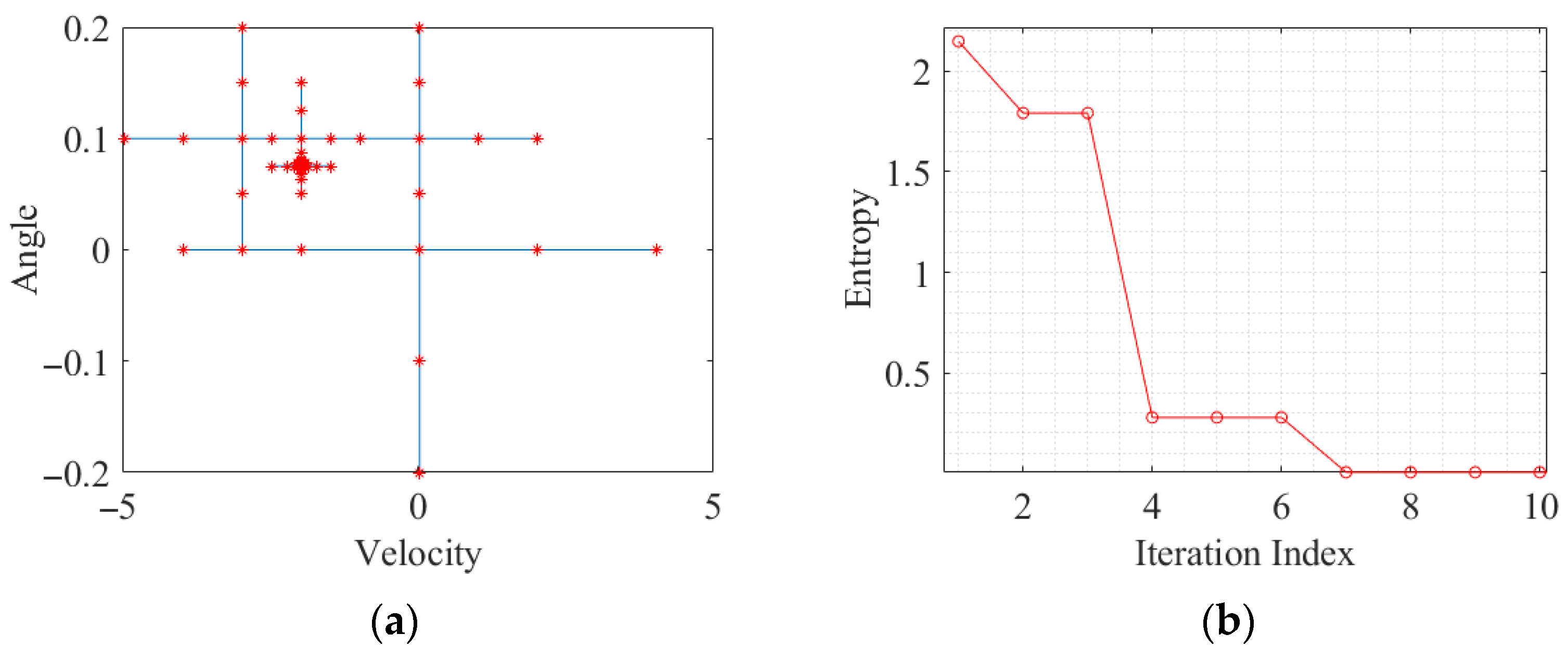
The entropy value curve of A4 by 2D enlightend search is shown in
Figure 19. And the minimum entropy finally converges to
= −1.97 m/s,
= 0.078°.
After using the proposed algorithm to process the synthetic data, it can be seen that the entropy values of the A3 and A4 refocused images can be minimized and converged when the two-dimensional parameters are equal to (−3.01 m/s, 0.03°) and (−1.97 m/s, 0.078°), respectively. These two sets of optimal parameters indicate the presence of the two moving targets in the scene. Therefore, the effectiveness of the proposed method in data containing real scenes is confirmed.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}