
Guidance-Aided Triple-Adaptive Frost Filter for Speckle Suppression in the Synthetic Aperture Radar Image

 ,
,  ,
, 
 and
and
Abstract
:1. Introduction
2. Backgrounds, Related Works, and Methods
2.1. Backgrounds and Related Works
2.1.1. Anisotropic Diffusion Model-Based Method
2.1.2. Framework of the Rolling Guidance Filter
2.1.3. Overview of the Scale Space Theory
2.2. Guidance-Aided Triple-Adaptive Frost Filter
2.2.1. Traditional Frost Filter
2.2.2. Scale-Adaptive Size for the Neighborhood
2.2.3. Adaptive Tuning Factor
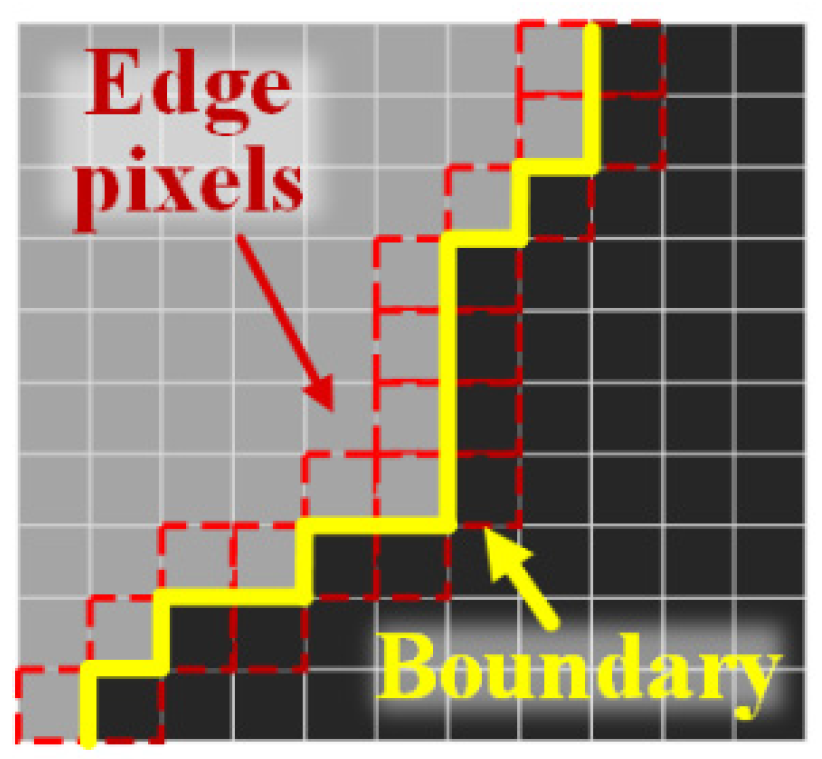
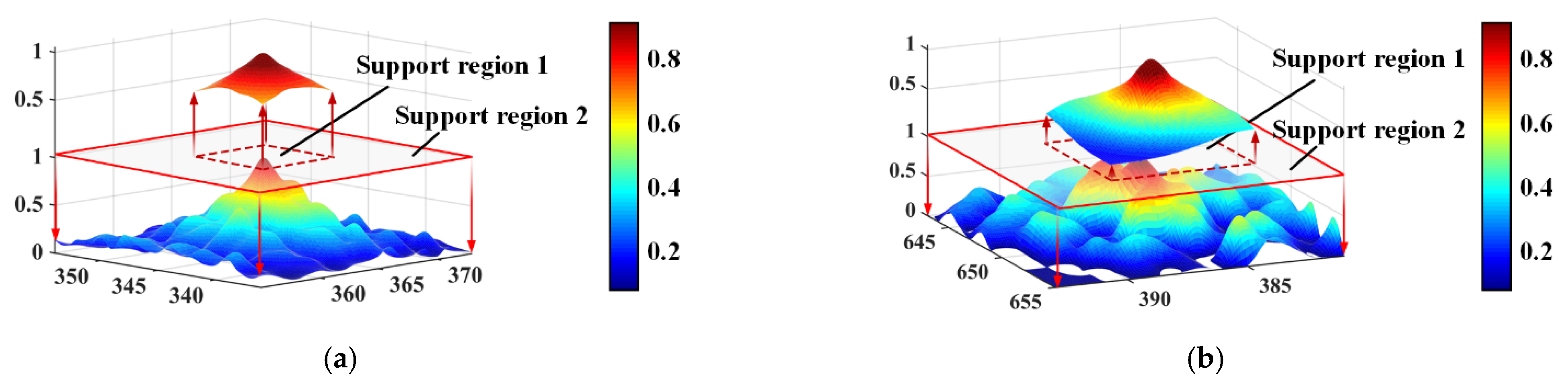
2.2.4. Guidance-Aided Edge Recovery Method
2.2.5. Combination Version for All the Adaptiveness
| Algorithm 1 Guidance-aided triple-adaptive Frost filter. |
| Input: The original SAR image , iteration times , , , , . Output: The filtered image Initialize: . Begin 1: 2: for do 3: Obtain the scale-adaptive sliding window size map of image ; 4: Obtain the edge response map of image referring to ; 5: Calculate the adaptive tuning factor matrix ; 6: Generate the filtered image by taking , , and into (14); 7: ; 8: end; 9: The output image ; End. |
3. Experiments
3.1. Experimental Design
3.2. Experimental Results
3.2.1. The Performance of Scale-Adaptive Sliding Window Sizing Method
3.2.2. The Performance of Guidance-Aided Adaptive Weighting Template
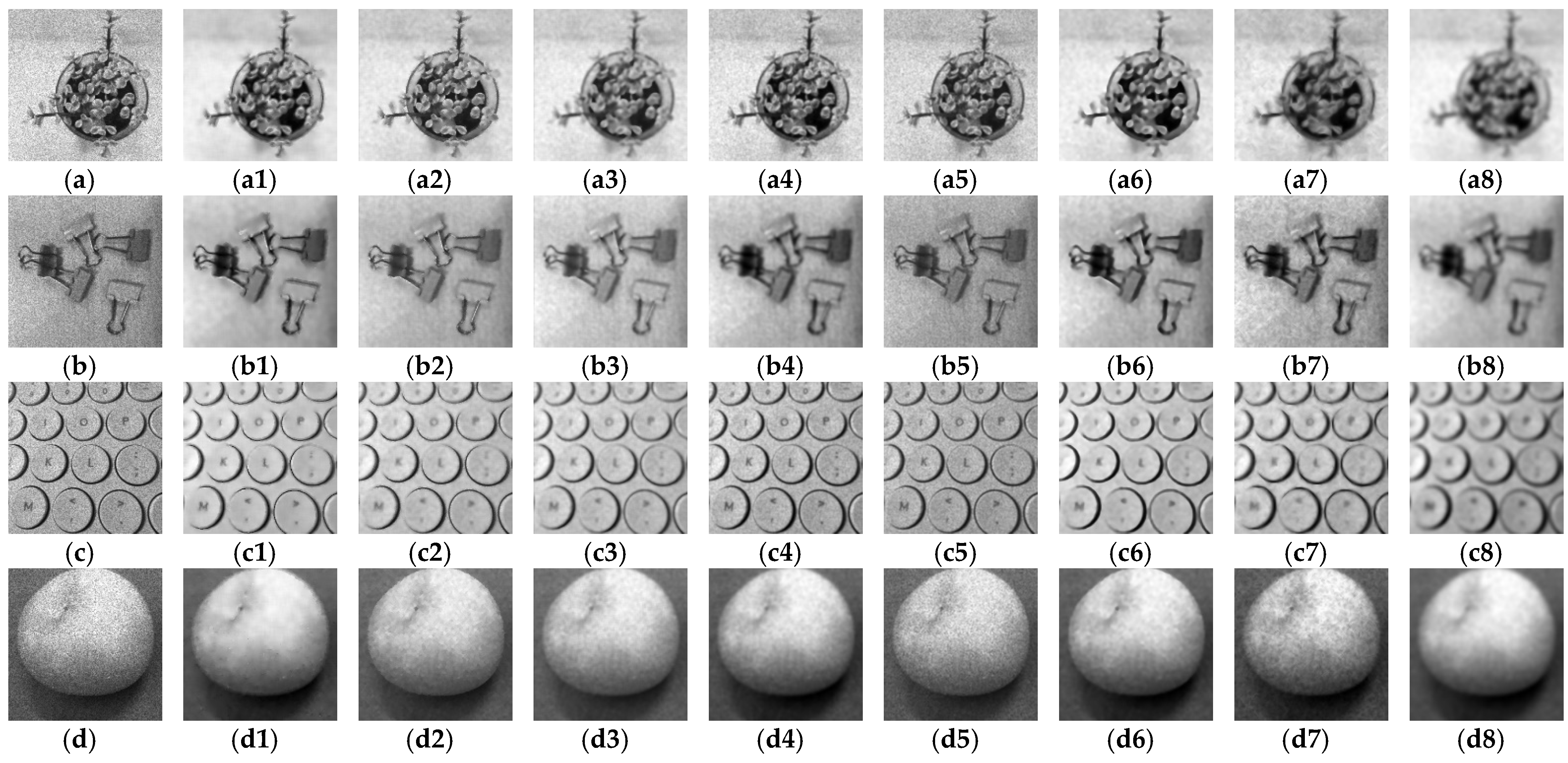
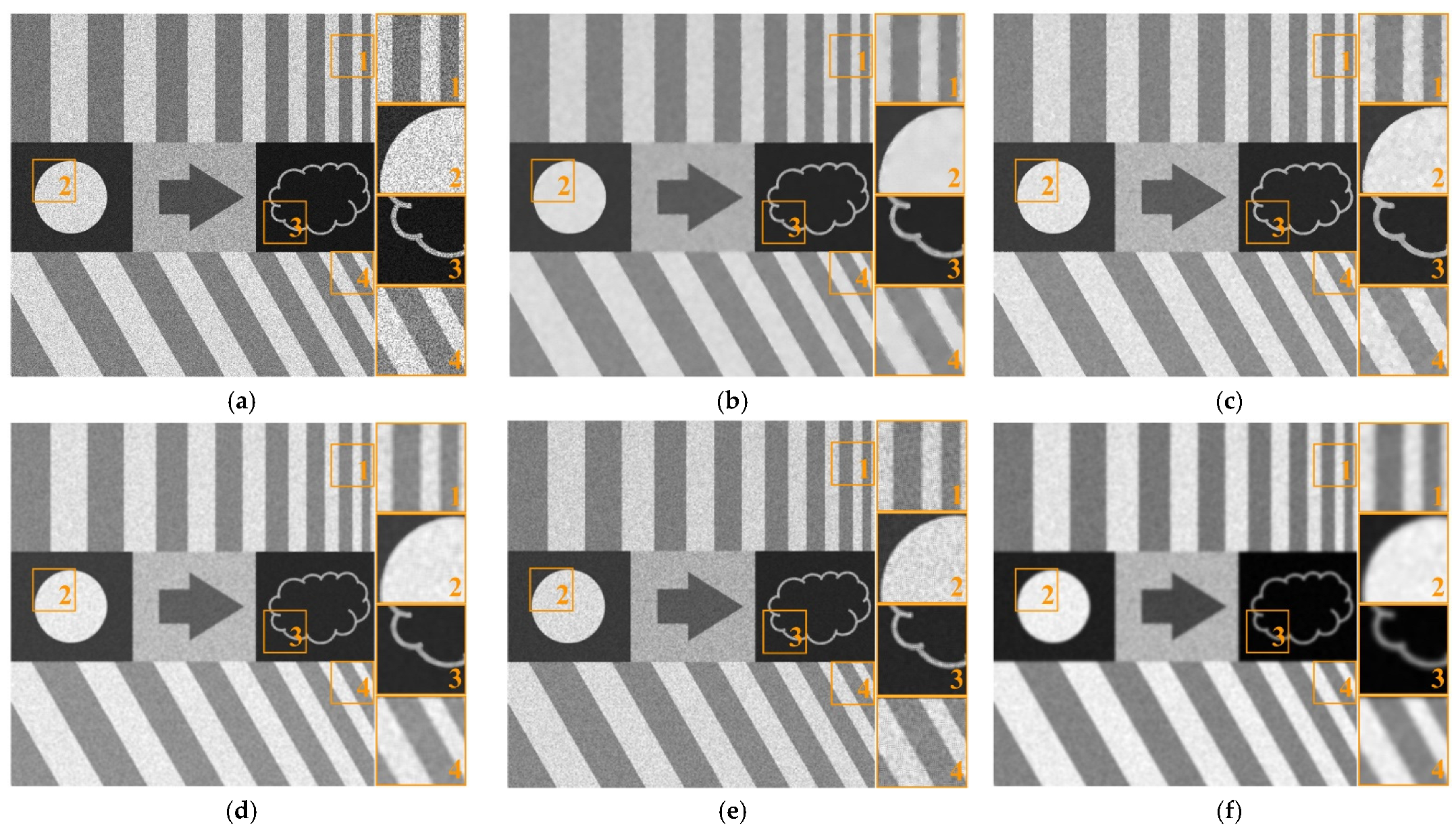
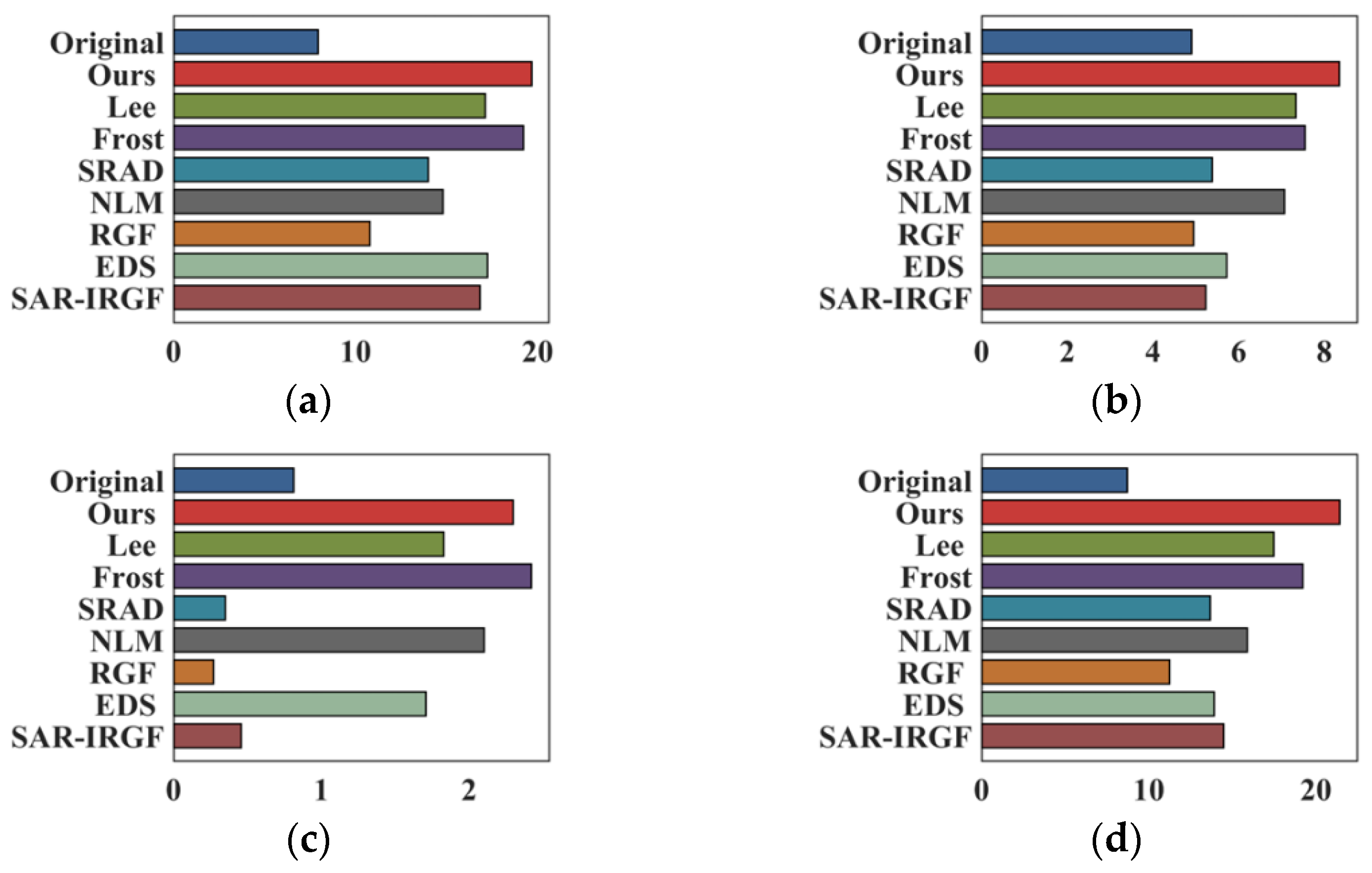
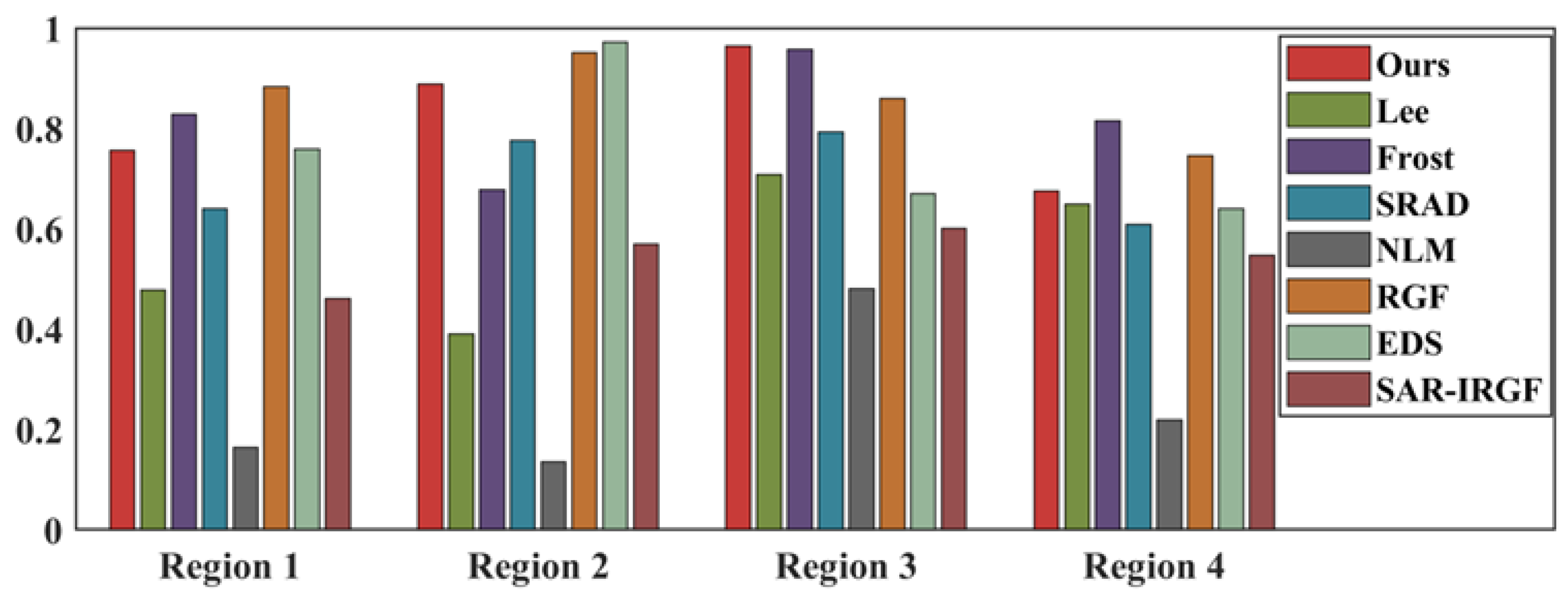
3.2.3. Experimental Results for Speckle Suppression on the Synthetic Images
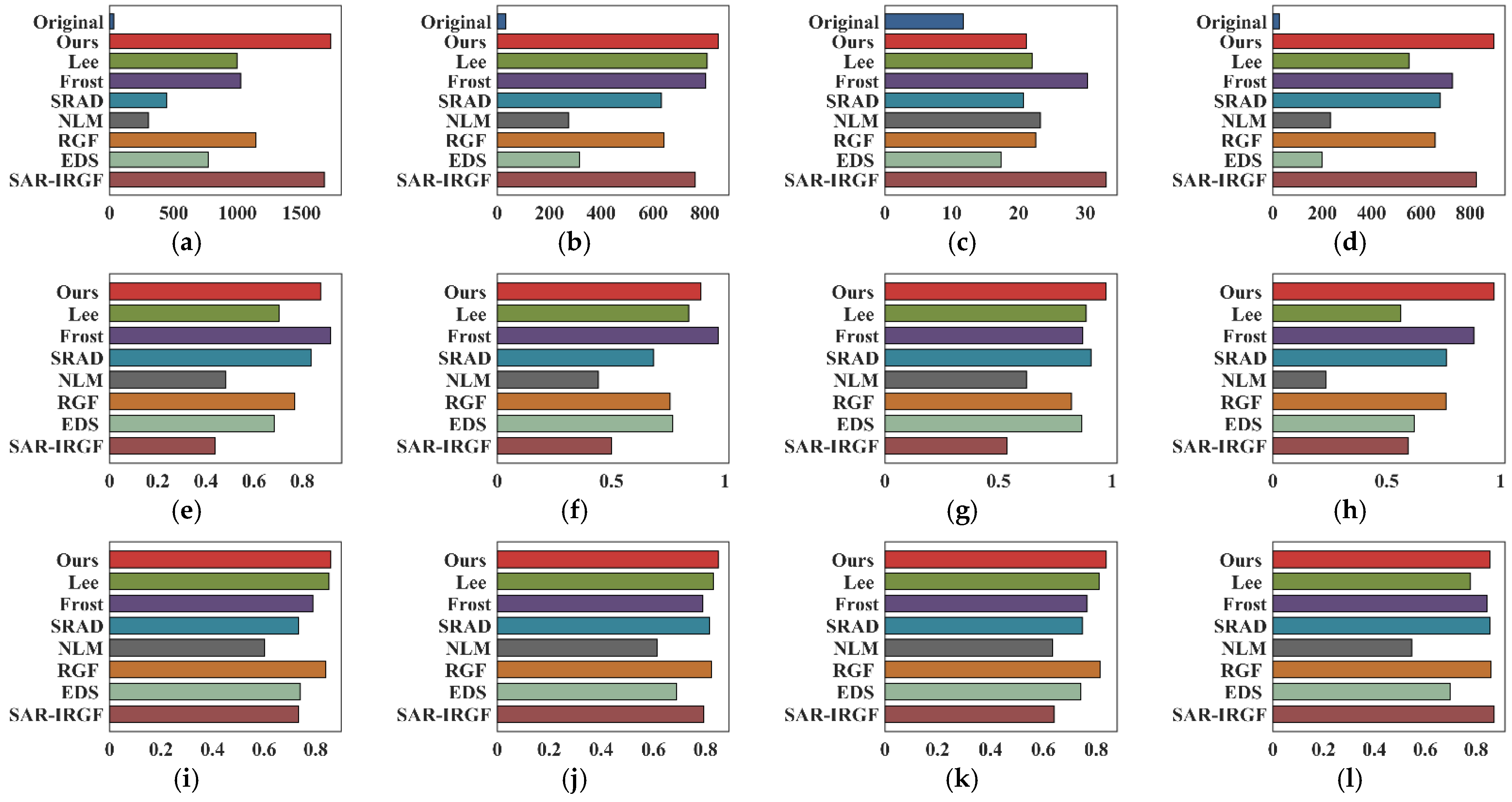
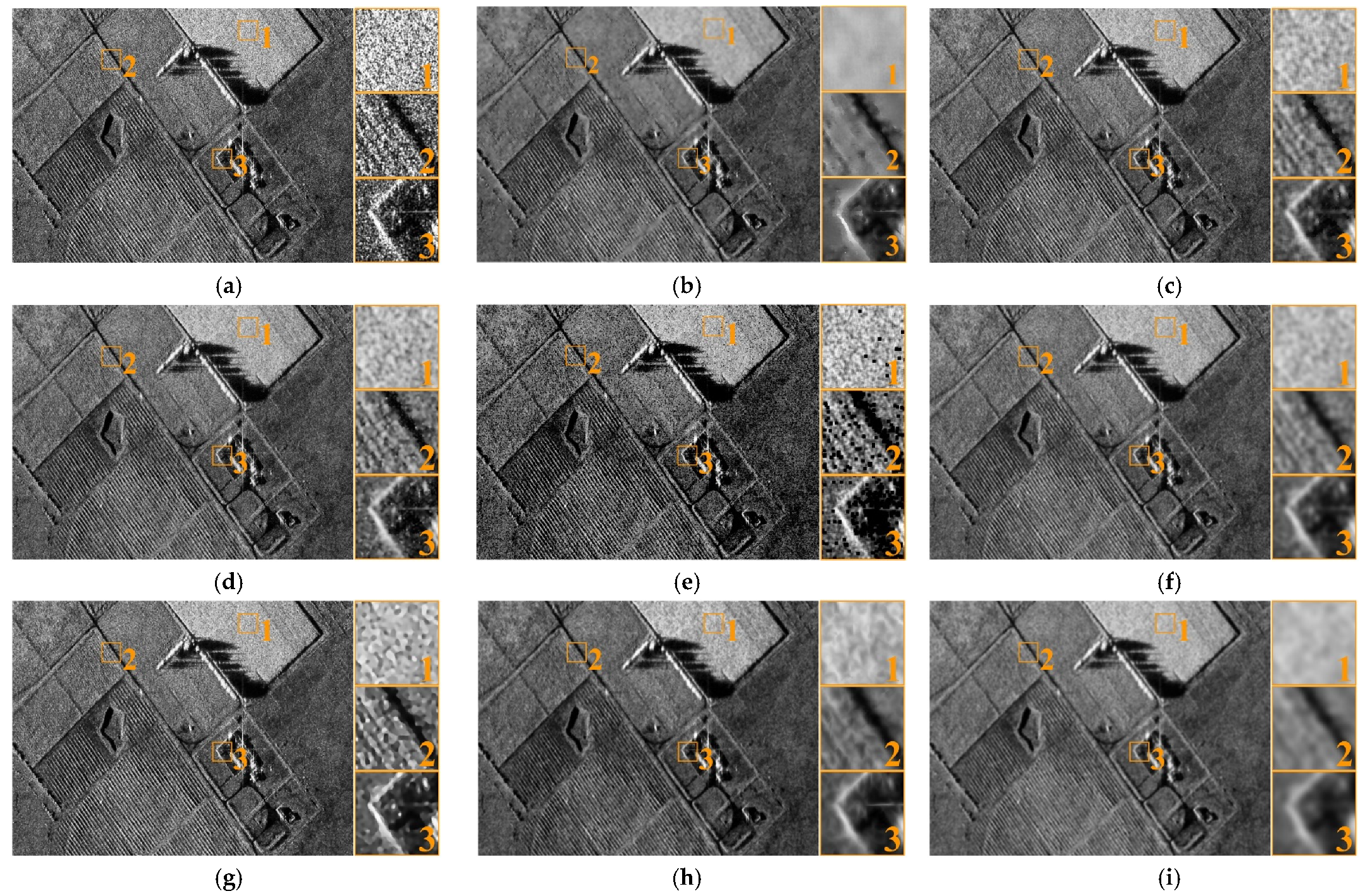
3.2.4. Experimental Results for Speckle Suppression on the Airborne SAR Images
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liang, J.; Liu, X.; Huang, K.; Li, X.; Wang, D.; Wang, X. Automatic Registration of Multisensor Images Using an Integrated Spatial and Mutual Information (SMI) Metric. IEEE Trans. Geosci. Remote Sens. 2014, 52, 603–615. [Google Scholar] [CrossRef]
- Chang, H.H.; Chan, W.C. Automatic Registration of Remote Sensing Images Based on Revised SIFT With Trilateral Computation and Homogeneity Enforcement. IEEE Trans. Geosci. Remote Sens. 2021, 59, 7635–7650. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, L.; Lin, G.; Cheng, Y. An Integrated De-Speckling Approach for Medical Ultrasound Images Based on Wavelet and Trilateral Filter. Circuits Syst. Signal Process. 2016, 36, 297–314. [Google Scholar] [CrossRef]
- Li, J.; Wang, Z.; Yu, W.; Luo, Y.; Yu, Z. A Novel Speckle Suppression Method with Quantitative Combination of Total Variation and Anisotropic Diffusion PDE Model. Remote Sens. 2022, 14, 796. [Google Scholar] [CrossRef]
- May, V.; Keller, Y.; Sharon, N.; Shkolnisky, Y. An Algorithm for Improving Non-Local Means Operators via Low-Rank Approximation. IEEE Trans. Image Process. 2016, 25, 1340–1353. [Google Scholar] [CrossRef] [Green Version]
- Deledalle, C.A.; Denis, L.; Tupin, F. Iterative Weighted Maximum Likelihood Denoising with Probabilistic Patch-Based Weights. IEEE Trans. Image Process. 2009, 18, 2661–2672. [Google Scholar] [CrossRef] [Green Version]
- Rudin, L.I.; Osher, S.; Fatemi, E. Nonlinear Total Variation Based Noise Removal Algorithms. Phys. D 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Perona, P.; Malik, J. Scale-Space and Edge Detection Using Anisotropic Diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 629–639. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Acton, S.T. Edge Detection in Ultrasound Imagery Using the Instantaneous Coefficient of Variation. IEEE Trans. Image Process. 2004, 13, 1640–1655. [Google Scholar] [CrossRef]
- Yu, Y.; Acton, S.T. Speckle Reducing Anisotropic Diffusion. IEEE Trans. Image Process. 2002, 11, 1260–1270. [Google Scholar] [CrossRef]
- Gu, S.; Zhang, L.; Zuo, W.; Feng, X. Weighted Nuclear Norm Minimization with Application to Image Denoising. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2862–2869. [Google Scholar] [CrossRef] [Green Version]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Chen, Q.; Montesinos, P.; Sen, Q.; Xia, D.S. Ramp Preserving Perona—Malik Model. Signal Process. 2010, 90, 1963–1975. [Google Scholar] [CrossRef]
- Lin, H.; Zhuang, Y.; Huang, Y.; Ding, X. Self-Supervised SAR Despeckling Powered by Implicit Deep Denoiser Prior. IEEE Geosci. Remote Sens. Lett. 2022, 19, 3212078. [Google Scholar] [CrossRef]
- Dalsasso, E.; Denis, L.; Tupin, F. SAR2SAR: A Semi-Supervised Despeckling Algorithm for SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 4321–4329. [Google Scholar] [CrossRef]
- Ma, Y.; Suda, N.; Cao, Y.; Vrudhula, S.; Seo, J. sun ALAMO: FPGA Acceleration of Deep Learning Algorithms with a Modularized RTL Compiler. Integration 2018, 62, 14–23. [Google Scholar] [CrossRef]
- Frost, V.S.; Abbott Stiles, J.; Shanmugan, K.S.; Holtzman, J.C. A Model for Radar Images and Its Application to Adaptive Digital Filtering of Multiplicative Noise. IEEE Trans. Pattern Anal. Mach. Intell. 1982, PAMI-4, 157–166. [Google Scholar] [CrossRef]
- Lindeberg, T. Scale-Space: A Framework for Handling Image Structures at Multiple Scales. In Proceedings of the CERN School of Computing, Egmond aan Zee, The Netherlands, 8–21 September 1996. [Google Scholar]
- Koenderink, J.J. The Structure of Images. Biol. Cybern. 1984, 50, 363–370. [Google Scholar] [CrossRef]
- Lindeberg, T. Scale-Space Theory: A Basic Tool for Analysing Structures at Different Scales. J. Appl. Stat. 1994, 21, 224–270. [Google Scholar] [CrossRef] [Green Version]
- Lindeberg, T. Scale-Space Theory in Computer Vision; Springer: New York, NY, USA, 1994. [Google Scholar]
- Zhang, Q.; Shen, X.; Xu, L.; Jia, J. Rolling Guidance Filter. In Proceedings of the European Conference on Computer Vision 2014, Zurich, Switzerland, 6–12 September 2014; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Jing, W.-B.; Jin, T.; Xiang, D.-L. Edge-Aware Superpixel Generation for SAR Imagery With One Iteration Merging. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1600–1604. [Google Scholar] [CrossRef]
- Li, J.; Wang, Z.; Yu, W.; Yu, Z. SAR-IRGF: A Novel Improved Rolling Guidance Filter for the Synthetic Aperture Radar Image. Electron. Lett. 2022, 58, 828–830. [Google Scholar] [CrossRef]
- Chen, J.; Chen, S.; Liu, Y.; Chen, X.; Yang, Y.; Zhang, Y. Robust Local Structure Visualization for Remote Sensing Image Registration. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1895–1908. [Google Scholar] [CrossRef]
- Guo, Q.; Wang, H.; Member, S.; Kang, L.; Li, Z.; Xu, F. Aircraft Target Detection from Spaceborne SAR Image. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1168–1171. [Google Scholar]
- Chen, L.; Jiang, X.; Li, Z.; Liu, X.; Zhou, Z. Feature-Enhanced Speckle Reduction via Low-Rank and Space-Angle Continuity for Circular SAR Target Recognition. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7734–7752. [Google Scholar] [CrossRef]
- Hui-Zhen, J.; Wang, T.-H. Modified Frost Filtering Based on Adaptive Parameter. Comput. Eng. Des. 2011, 32, 3793–3843. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, Z.; Chen, Y.; Liu, S.; Song, Y. Frost Filtering Algorithm of SAR Images with Adaptive Windowing and Adaptive Tuning Factor. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1097–1101. [Google Scholar] [CrossRef]
- Fjørtoft, R.; Lopes, A.; Cubero-Castan, E. An Optimal Multiedge Detector for SAR Image Segmentation. IEEE Trans. Geosci. Remote Sens. 1998, 36, 793–802. [Google Scholar] [CrossRef] [Green Version]
- Mastriani, M.; Giraldez, A.E. Enhanced Directional Smoothing Algorithm for Edge-Preserving Smoothing of Synthetic-Aperture Radar Images. Meas. Sci. Rev. 2014, 4, 1–11. [Google Scholar] [CrossRef]
- Anfinsen, S.N.; Doulgeris, A.P.; Eltoft, T. Estimation of the Equivalent Number of Looks in Polarimetric Sar Imagery. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 7–11 July 2008; IEEE: Piscataway, NJ, USA, 2008; Volume 4, pp. 487–490. [Google Scholar]
- Kuppusamy, P.G.; Joseph, J.; Sivaraman, J. A Full Reference Morphological Edge Similarity Index to Account Processing Induced Edge Artefacts in Magnetic Resonance Images. Biocybern. Biomed. Eng. 2017, 37, 159–166. [Google Scholar] [CrossRef]
- Huang, Y.; Xia, W.; Lu, Z.; Liu, Y.; Chen, H.; Zhou, J.; Fang, L.; Zhang, Y. Noise-Powered Disentangled Representation for Unsupervised Speckle Reduction of Optical Coherence Tomography Images. IEEE Trans. Med. Imaging 2021, 40, 2600–2614. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Size | |
|---|---|---|
| Synthetic image | 880 × 880 | (1, 10, 0.05, 7, 19) |
| Plant | 300 × 300 | (1, 50, 0.05, 5, 13) |
| Clamps | 300 × 300 | (1, 3, 0.05, 5, 13) |
| Keyboard | 300 × 300 | (1, 50, 0.05, 5, 13) |
| apple | 300 × 300 | (1, 80, 0.05, 5, 13) |
| Ku-band SAR image | 2224 × 1668 | (1, 50, 0.1, 9, 25) |
| S-band SAR image | 5460 × 3580 | (1, 50, 0.1, 11, 31) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Yu, W.; Wang, Y.; Wang, Z.; Xiao, J.; Yu, Z.; Zhang, D. Guidance-Aided Triple-Adaptive Frost Filter for Speckle Suppression in the Synthetic Aperture Radar Image. Remote Sens. 2023, 15, 551. https://doi.org/10.3390/rs15030551
Li J, Yu W, Wang Y, Wang Z, Xiao J, Yu Z, Zhang D. Guidance-Aided Triple-Adaptive Frost Filter for Speckle Suppression in the Synthetic Aperture Radar Image. Remote Sensing. 2023; 15(3):551. https://doi.org/10.3390/rs15030551
Chicago/Turabian StyleLi, Jiamu, Wenbo Yu, Yi Wang, Zijian Wang, Jiarong Xiao, Zhongjun Yu, and Desheng Zhang. 2023. "Guidance-Aided Triple-Adaptive Frost Filter for Speckle Suppression in the Synthetic Aperture Radar Image" Remote Sensing 15, no. 3: 551. https://doi.org/10.3390/rs15030551
APA StyleLi, J., Yu, W., Wang, Y., Wang, Z., Xiao, J., Yu, Z., & Zhang, D. (2023). Guidance-Aided Triple-Adaptive Frost Filter for Speckle Suppression in the Synthetic Aperture Radar Image. Remote Sensing, 15(3), 551. https://doi.org/10.3390/rs15030551