
Resolving Ambiguities in SHARAD Data Analysis Using High-Resolution Digital Terrain Models


Abstract
:1. Introduction
2. SHARAD Data Analysis with MOLA
2.1. SPRATS: A Toolset for Radar Simulation and Processing
2.2. Region of Interest
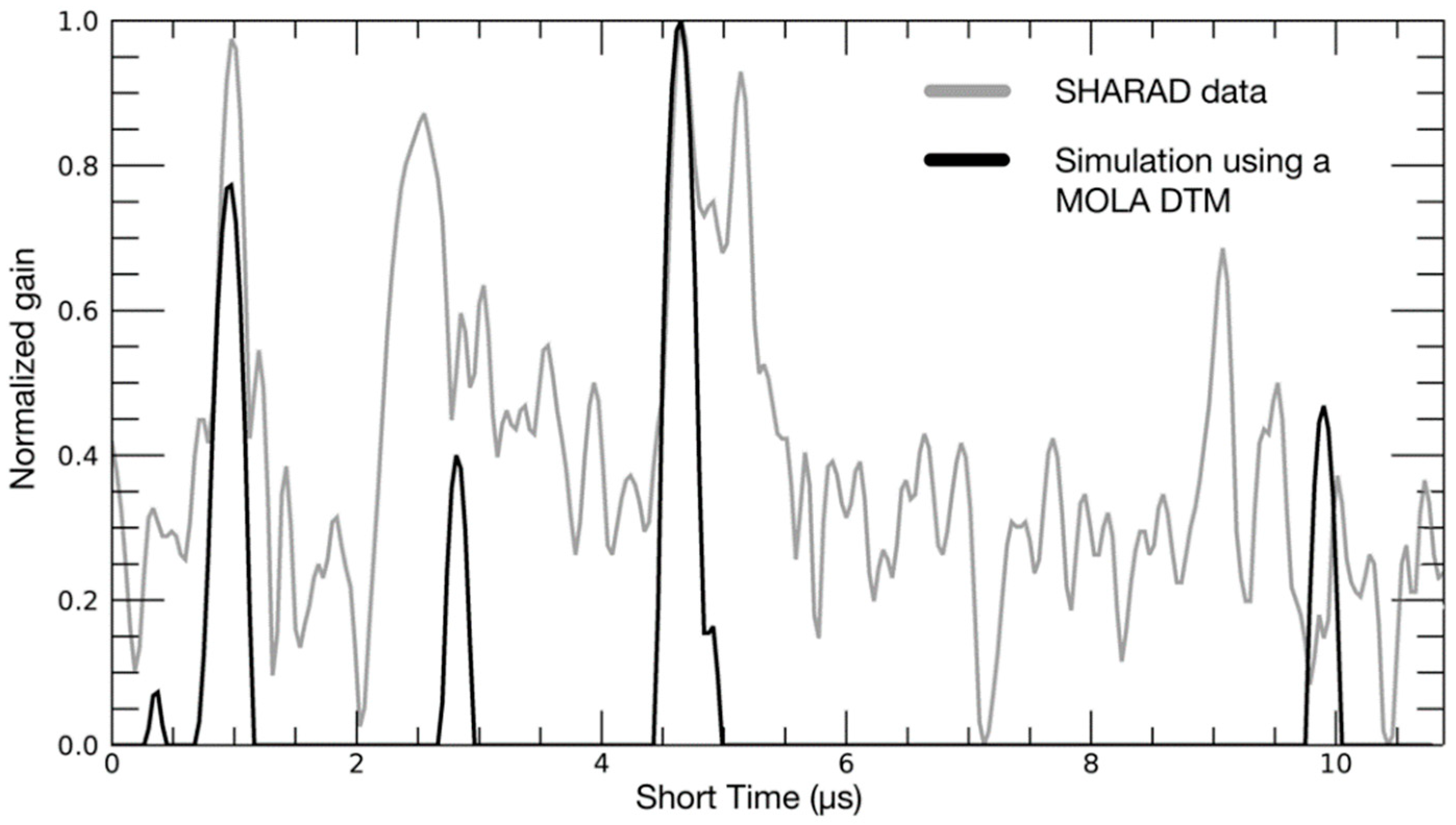
2.3. Simulations with MOLA DTMs
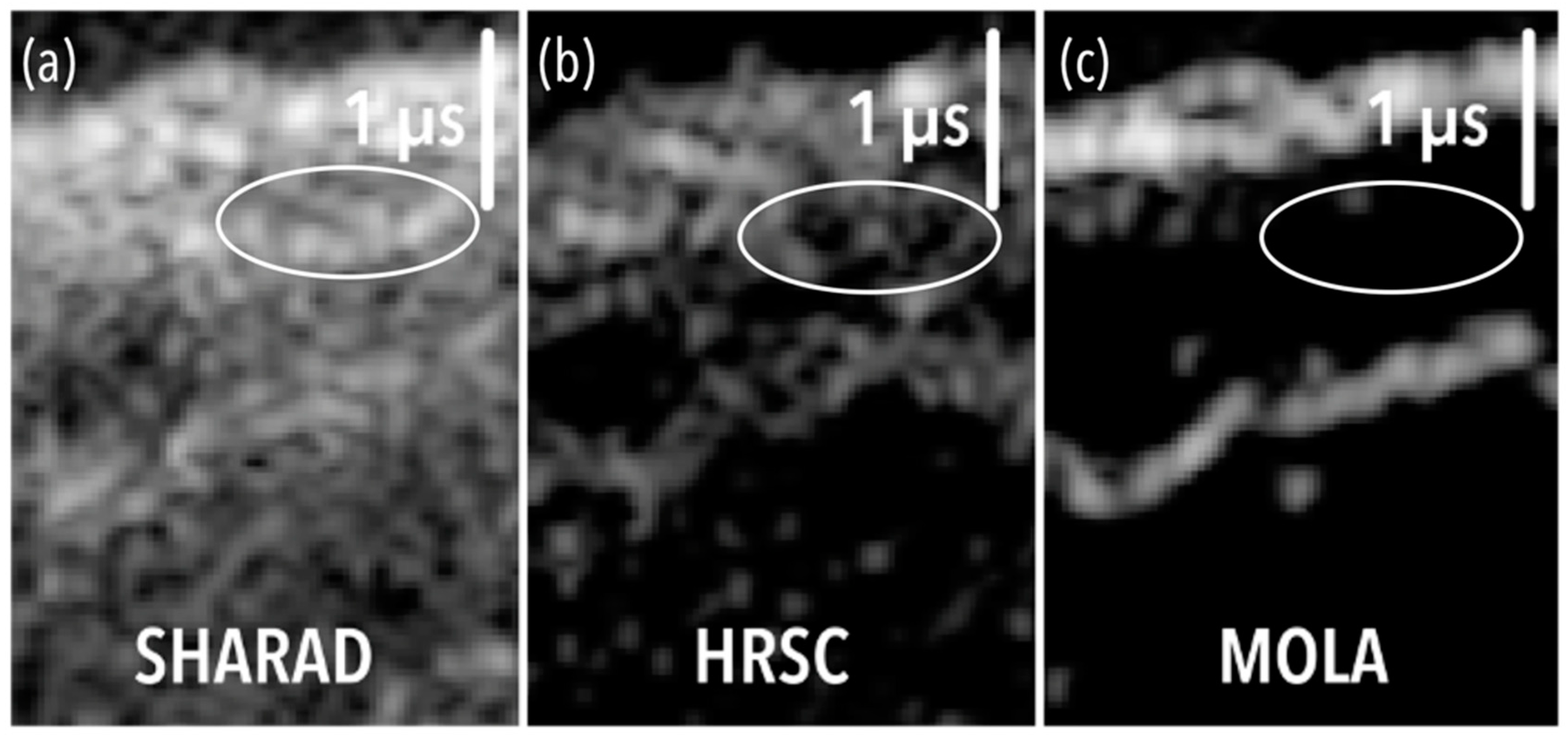
2.4. Limits of MOLA DTMs for Shallow Subsurface Interpretations
3. Extending the Radar Analysis Further with HRSC DTMs
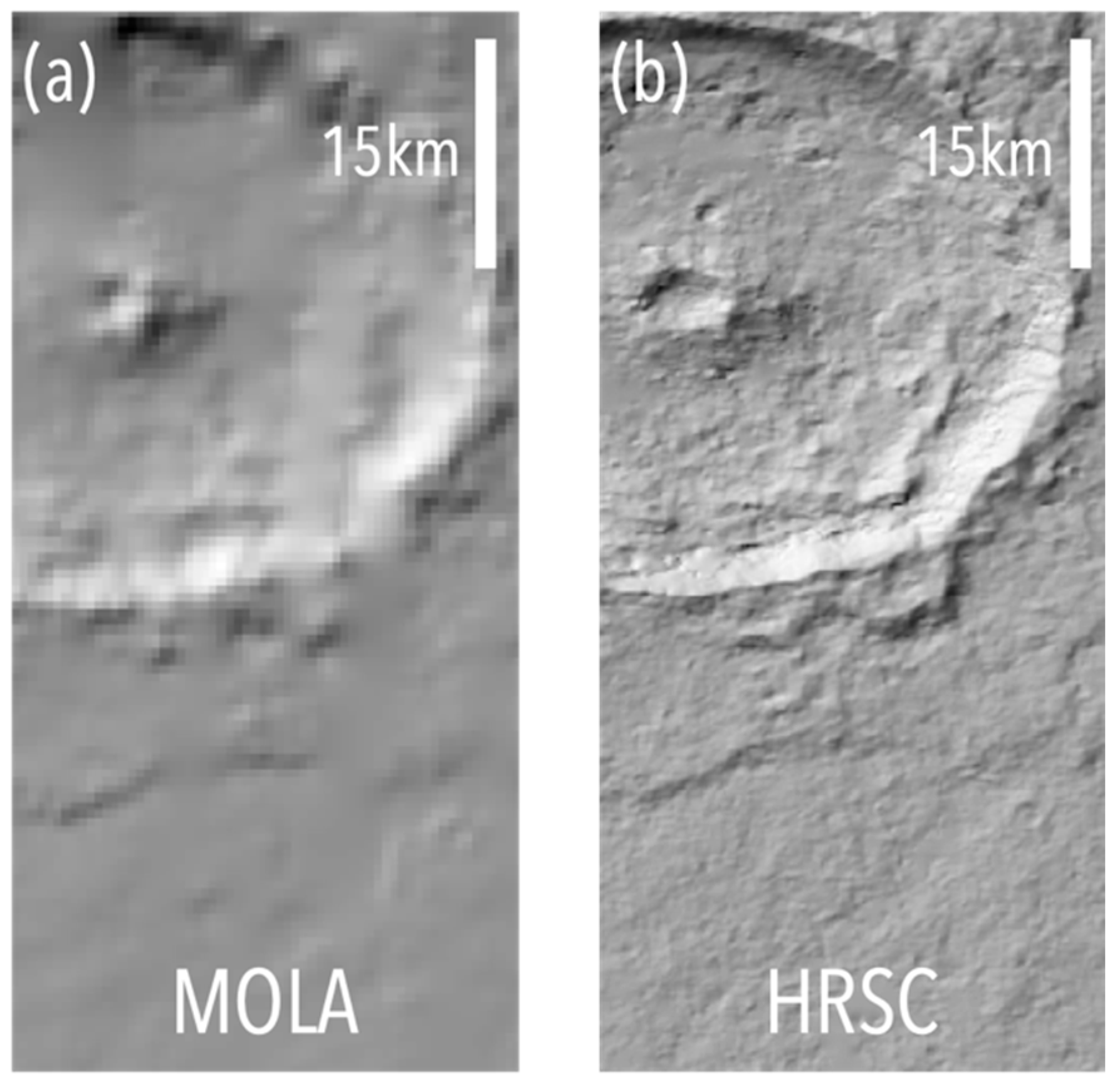
3.1. HRSC as an Upgrade of MOLA DTMs
3.2. Artifacts on DTMs Due to Photogrammetry
4. CTX as an Optimal DTM for SHARAD Data Interpretation
4.1. CTX Echo Reconstruction on a Rough Surface
4.1.1. Resolution Higher Than the Radar Wavelength for a Quasi-Perfect Reconstruction of the Signal
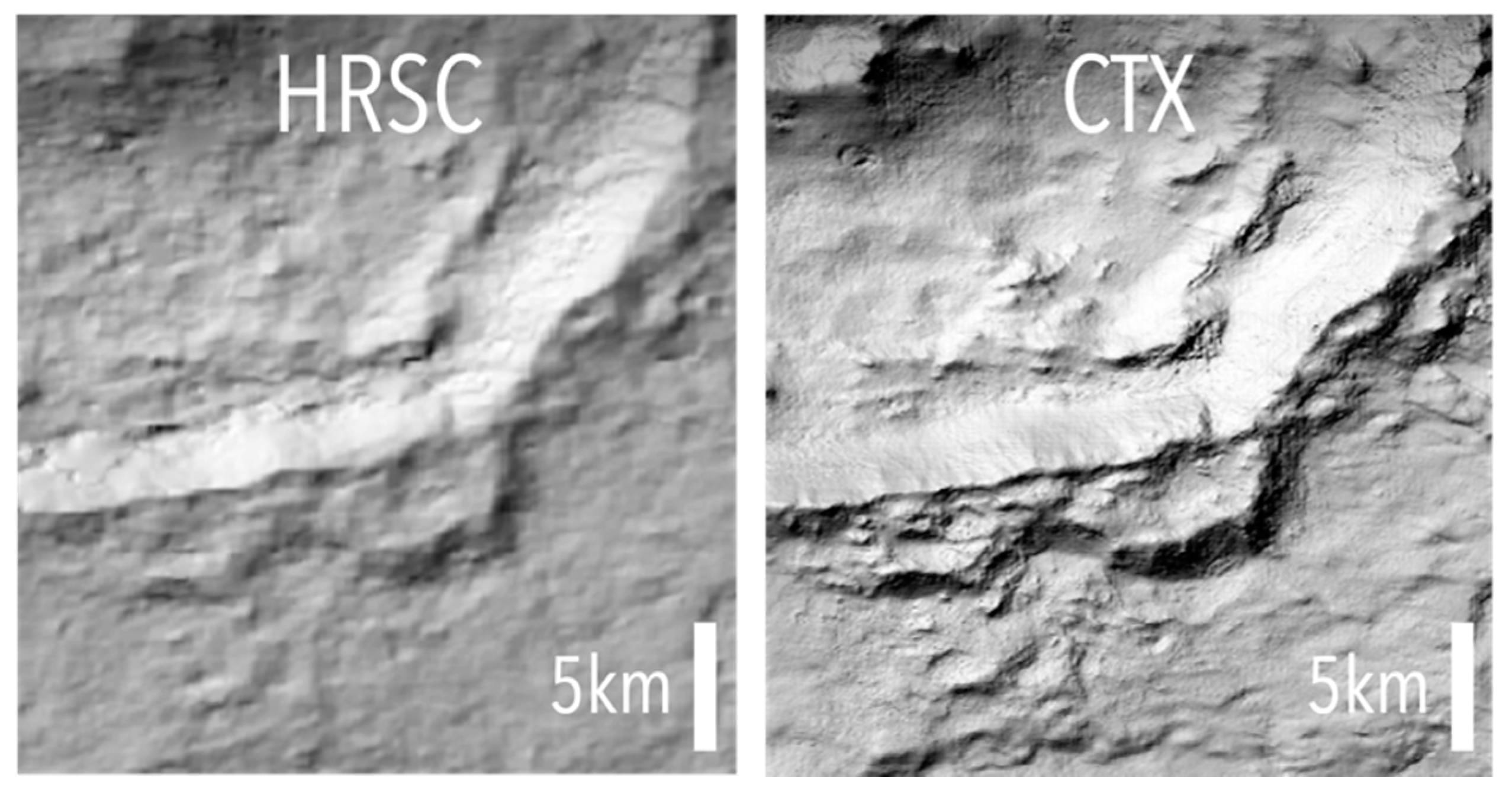
4.1.2. Impact of the Resolution Reduction on CTX DTMs
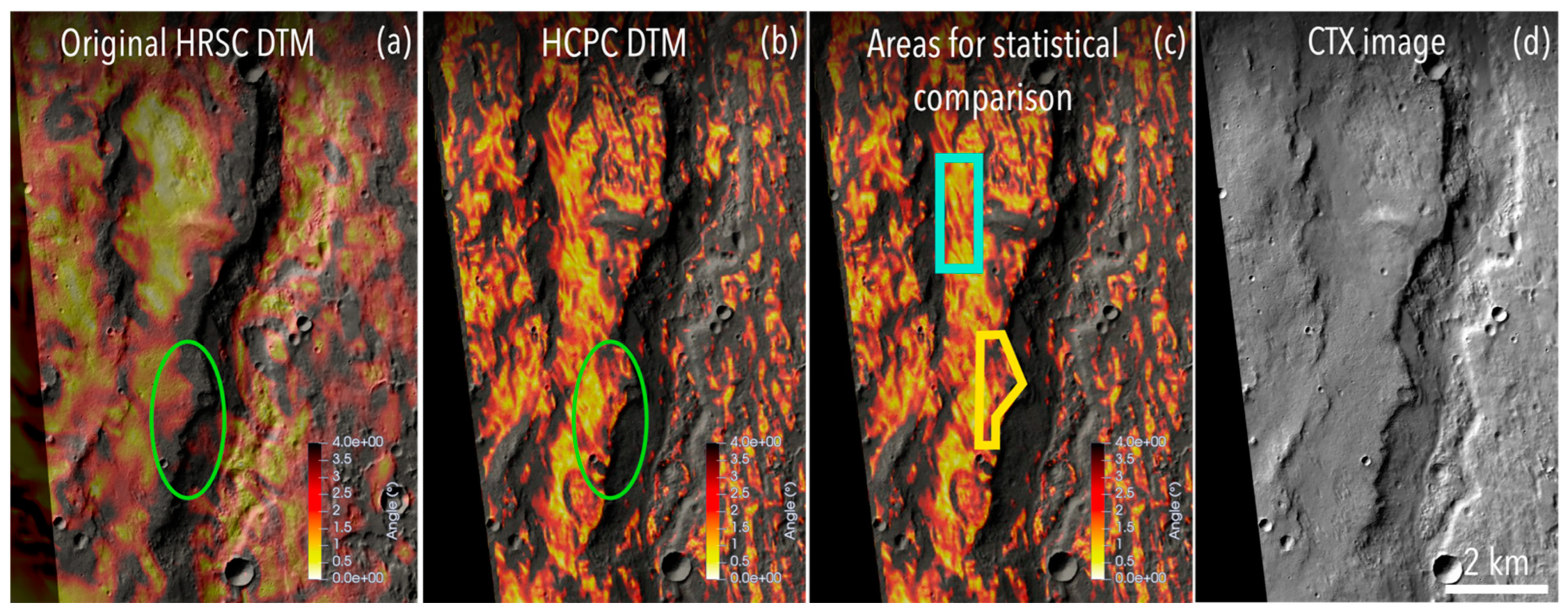
4.2. Results in the Terra Cimmeria Region of Interest
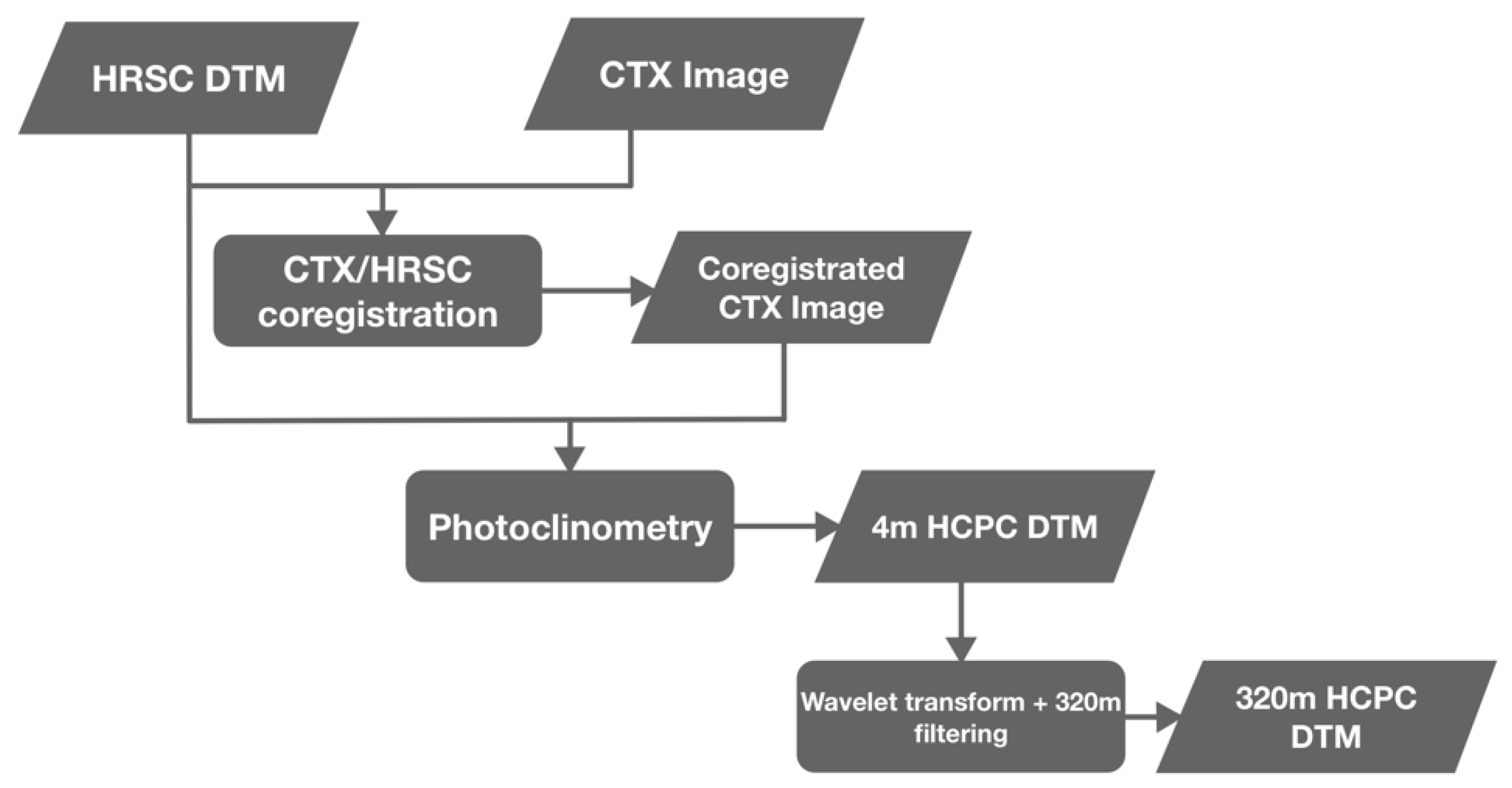
4.2.1. Overcoming the Lack of CTX Coverage with Photoclinometry
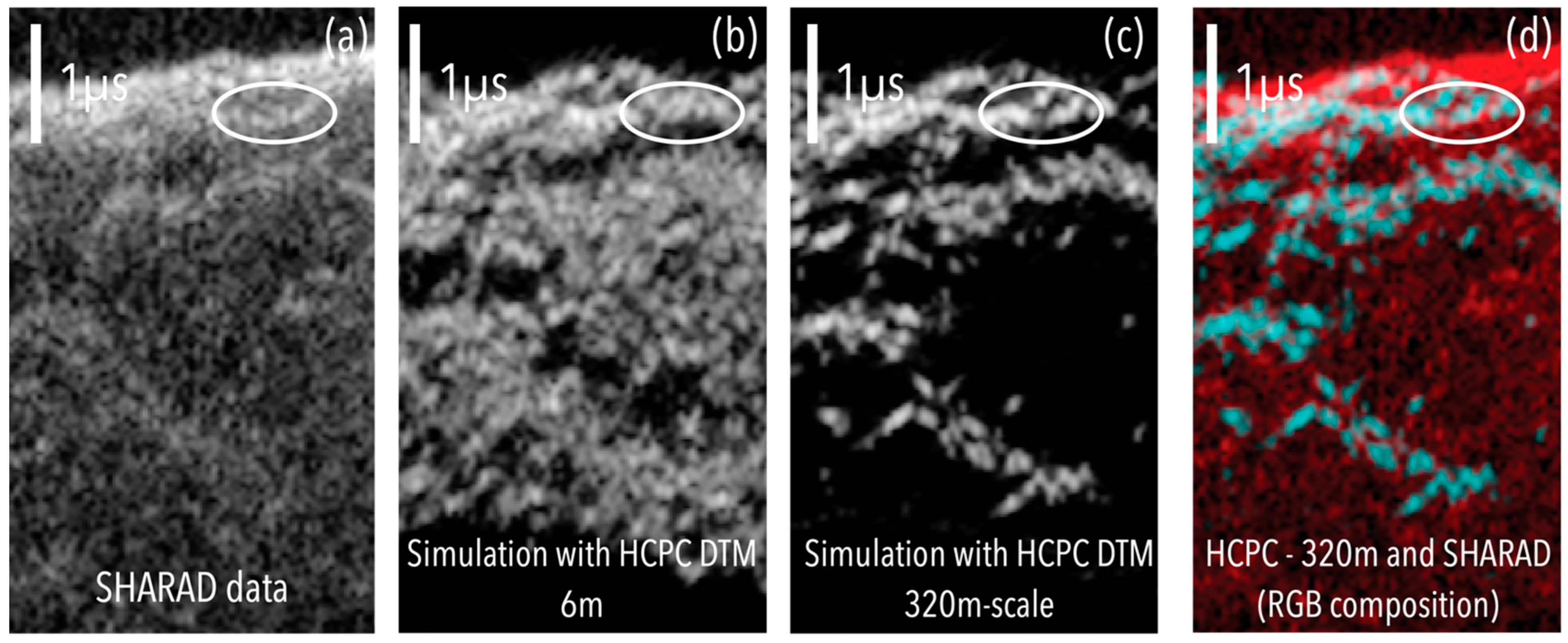
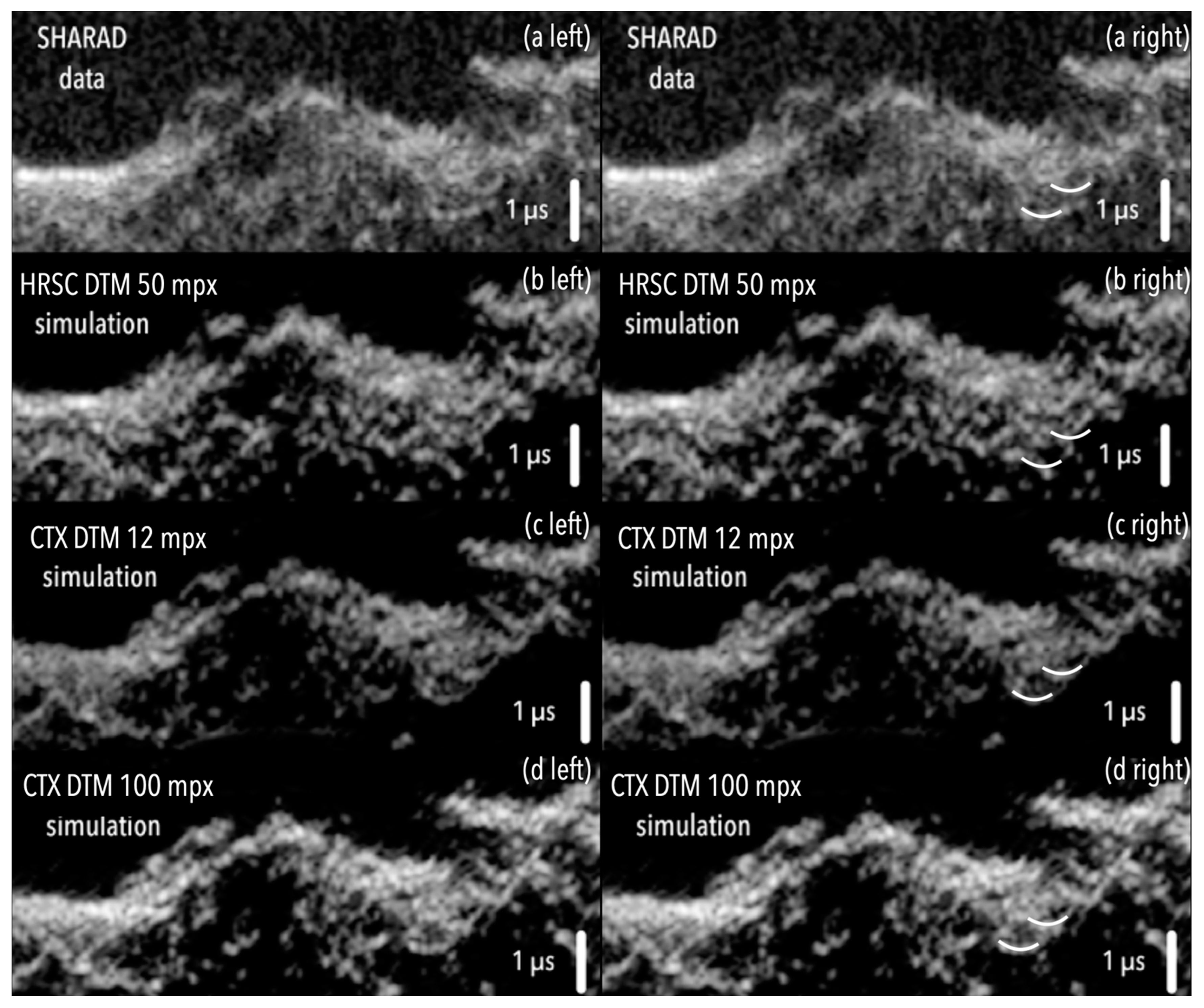
4.2.2. High Sensitivity to Small-Scale Features for Radar Simulations
4.3. Detection of DTM Errors with Radar Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mouginot, J.; Kofman, W.; Safaeinili, A.; Grima, C.; Herique, A.; Plaut, J.J. MARSIS Surface Reflectivity of the South Residual Cap of Mars. Icarus 2009, 201, 454–459. [Google Scholar] [CrossRef] [Green Version]
- Plaut, J.J.; Picardi, G.; Safaeinili, A.; Ivanov, A.B.; Milkovich, S.M.; Cicchetti, A.; Kofman, W.; Mouginot, J.; Farrell, W.M.; Phillips, R.J.; et al. Subsurface Radar Sounding of the South Polar Layered Deposits of Mars. Science 2007, 316, 92–95. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Holt, J.W.; Safaeinili, A.; Plaut, J.J.; Head, J.W.; Phillips, R.J.; Seu, R.; Kempf, S.D.; Choudhary, P.; Young, D.A.; Putzig, N.E.; et al. Radar Sounding Evidence for Buried Glaciers in the Southern Mid-Latitudes of Mars. Science 2008, 322, 1235–1238. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morgan, G.A.; Putzig, N.E.; Perry, M.R.; Sizemore, H.G.; Bramson, A.M.; Petersen, E.I.; Bain, Z.M.; Baker, D.M.H.; Mastrogiuseppe, M.; Hoover, R.H.; et al. Availability of Subsurface Water-Ice Resources in the Northern Mid-Latitudes of Mars. Nat. Astron. 2021, 5, 230–236. [Google Scholar] [CrossRef]
- Laskar, J.; Correia, A.C.M.; Gastineau, M.; Joutel, F.; Levrard, B.; Robutel, P. Long Term Evolution and Chaotic Diffusion of the Insolation Quantities of Mars. Icarus 2004, 170, 343–364. [Google Scholar] [CrossRef] [Green Version]
- Nouvel, J.-F.; Herique, A.; Kofman, W.; Safaeinili, A. Radar Signal Simulation: Surface Modeling with the Facet Method: RADAR SIGNAL SIMULATION. Radio Sci. 2004, 39, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Seu, R.; Phillips, R.J.; Biccari, D.; Orosei, R.; Masdea, A.; Picardi, G.; Safaeinili, A.; Campbell, B.A.; Plaut, J.J.; Marinangeli, L.; et al. SHARAD Sounding Radar on the Mars Reconnaissance Orbiter. J. Geophys. Res. 2007, 112, E05S05. [Google Scholar] [CrossRef]
- Gassot, O.; Hérique, A.; Rogez, Y.; Kofman, W.; Zine, S.; Ludimbulu, P.-P. SPRATS: A Versatile Simulation and Processing RAdar ToolS for Planetary Missions. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–5. [Google Scholar]
- Berquin, Y.; Herique, A.; Kofman, W.; Heggy, E. Computing Low-Frequency Radar Surface Echoes for Planetary Radar Using Huygens-Fresnel’s Principle: COMPUTING RADAR SURFACE ECHOES. Radio Sci. 2015, 50, 1097–1109. [Google Scholar] [CrossRef] [Green Version]
- Adeli, S.; Hauber, E.; Michael, G.G.; Fawdon, P.; Smith, I.B.; Jaumann, R. Geomorphological Evidence of Localized Stagnant Ice Deposits in Terra Cimmeria, Mars. J. Geophys. Res. Planets 2019, 124, 1525–1541. [Google Scholar] [CrossRef] [Green Version]
- Zuber, M.T.; Smith, D.E.; Solomon, S.C.; Muhleman, D.O.; Head, J.W.; Garvin, J.B.; Abshire, J.B.; Bufton, J.L. The Mars Observer Laser Altimeter Investigation. J. Geophys. Res. 1992, 97, 7781. [Google Scholar] [CrossRef]
- Neumann, G.A. Mars Orbiter Laser Altimeter Pulse Width Measurements and Footprint-Scale Roughness. Geophys. Res. Lett. 2003, 30, 1561. [Google Scholar] [CrossRef]
- Carter, L.M.; Campbell, B.A.; Watters, T.R.; Phillips, R.J.; Putzig, N.E.; Safaeinili, A.; Plaut, J.J.; Okubo, C.H.; Egan, A.F.; Seu, R.; et al. Shallow Radar (SHARAD) Sounding Observations of the Medusae Fossae Formation, Mars. Icarus 2009, 199, 295–302. [Google Scholar] [CrossRef]
- Nunes, D.C.; Smrekar, S.E.; Safaeinili, A.; Holt, J.; Phillips, R.J.; Seu, R.; Campbell, B. Examination of Gully Sites on Mars with the Shallow Radar. J. Geophys. Res. 2010, 115, E10004. [Google Scholar] [CrossRef] [Green Version]
- Plaut, J.J.; Safaeinili, A.; Holt, J.W.; Phillips, R.J.; Head, J.W.; Seu, R.; Putzig, N.E.; Frigeri, A. Radar Evidence for Ice in Lobate Debris Aprons in the Mid-Northern Latitudes of Mars: Radar evidence for mid-latitude mars ice. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef] [Green Version]
- Cook, C.W.; Bramson, A.M.; Byrne, S.; Holt, J.W.; Christoffersen, M.S.; Viola, D.; Dundas, C.M.; Goudge, T.A. Sparse Subsurface Radar Reflectors in Hellas Planitia, Mars. Icarus 2020, 348, 113847. [Google Scholar] [CrossRef]
- Malin, M.C.; Bell, J.F.; Cantor, B.A.; Caplinger, M.A.; Calvin, W.M.; Clancy, R.T.; Edgett, K.S.; Edwards, L.; Haberle, R.M.; James, P.B.; et al. Context Camera Investigation on Board the Mars Reconnaissance Orbiter. J. Geophys. Res. 2007, 112, E05S04. [Google Scholar] [CrossRef] [Green Version]
- Quantin-Nataf, C.; Lozac’h, L.; Thollot, P.; Loizeau, D.; Bultel, B.; Fernando, J.; Allemand, P.; Dubuffet, F.; Poulet, F.; Ody, A.; et al. MarsSI: Martian Surface Data Processing Information System. Planet. Space Sci. 2018, 150, 157–170. [Google Scholar] [CrossRef]
- Doute, S.; Jiang, C. Small-Scale Topographical Characterization of the Martian Surface with In-Orbit Imagery. IEEE Trans. Geosci. Remote Sens. 2020, 58, 447–460. [Google Scholar] [CrossRef]
- Bayer, T.; Bittner, M.; Buffington, B.; Castet, J.-F.; Dubos, G.; Jackson, M.; Lee, G.; Lewis, K.; Kastner, J.; Schimmels, K.; et al. Europa Clipper Mission Update: Preliminary Design with Selected Instruments. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–19. [Google Scholar]
- Grasset, O.; Dougherty, M.K.; Coustenis, A.; Bunce, E.J.; Erd, C.; Titov, D.; Blanc, M.; Coates, A.; Drossart, P.; Fletcher, L.N.; et al. JUpiter ICy Moons Explorer (JUICE): An ESA Mission to Orbit Ganymede and to Characterise the Jupiter System. Planet. Space Sci. 2013, 78, 1–21. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument | DTM Resolution (m/Pixel) |
|---|---|
| MOLA | 463 |
| HRSC | 50–100 |
| CTX | 12–18 |
| HRSC DTM corrected by photoclinometry | 6 |
| Instrument | Simultaneous Stereo Pair Acquisition | Convergence Angle (°) | Image Width at Closest Approach (km) |
|---|---|---|---|
| HRSC | Yes | 37.8 | 52 |
| CTX | No | 0–60 | 30 |
| Northern Plateau | Southern Plateau | |
|---|---|---|
| HCPC mean angle (°) | 1.05 | 1.31 |
| HCPC angle rms (°) | 3.24 | 4.36 |
| HCPC slant range rms (m) | 23.13 | 27.33 |
| MOLA mean angle (°) | 1.34 | 4.26 |
| MOLA angle rms (°) | 0.1 | 0.6 |
| MOLA slant range rms (m) | 20.30 | 26.61 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Desage, L.; Herique, A.; Douté, S.; Zine, S.; Kofman, W. Resolving Ambiguities in SHARAD Data Analysis Using High-Resolution Digital Terrain Models. Remote Sens. 2023, 15, 764. https://doi.org/10.3390/rs15030764
Desage L, Herique A, Douté S, Zine S, Kofman W. Resolving Ambiguities in SHARAD Data Analysis Using High-Resolution Digital Terrain Models. Remote Sensing. 2023; 15(3):764. https://doi.org/10.3390/rs15030764
Chicago/Turabian StyleDesage, Léopold, Alain Herique, Sylvain Douté, Sonia Zine, and Wlodek Kofman. 2023. "Resolving Ambiguities in SHARAD Data Analysis Using High-Resolution Digital Terrain Models" Remote Sensing 15, no. 3: 764. https://doi.org/10.3390/rs15030764
APA StyleDesage, L., Herique, A., Douté, S., Zine, S., & Kofman, W. (2023). Resolving Ambiguities in SHARAD Data Analysis Using High-Resolution Digital Terrain Models. Remote Sensing, 15(3), 764. https://doi.org/10.3390/rs15030764