


Urban Tree Canopy Mapping Based on Double-Branch Convolutional Neural Network and Multi-Temporal High Spatial Resolution Satellite Imagery

 ,
, 
Abstract
:1. Introduction
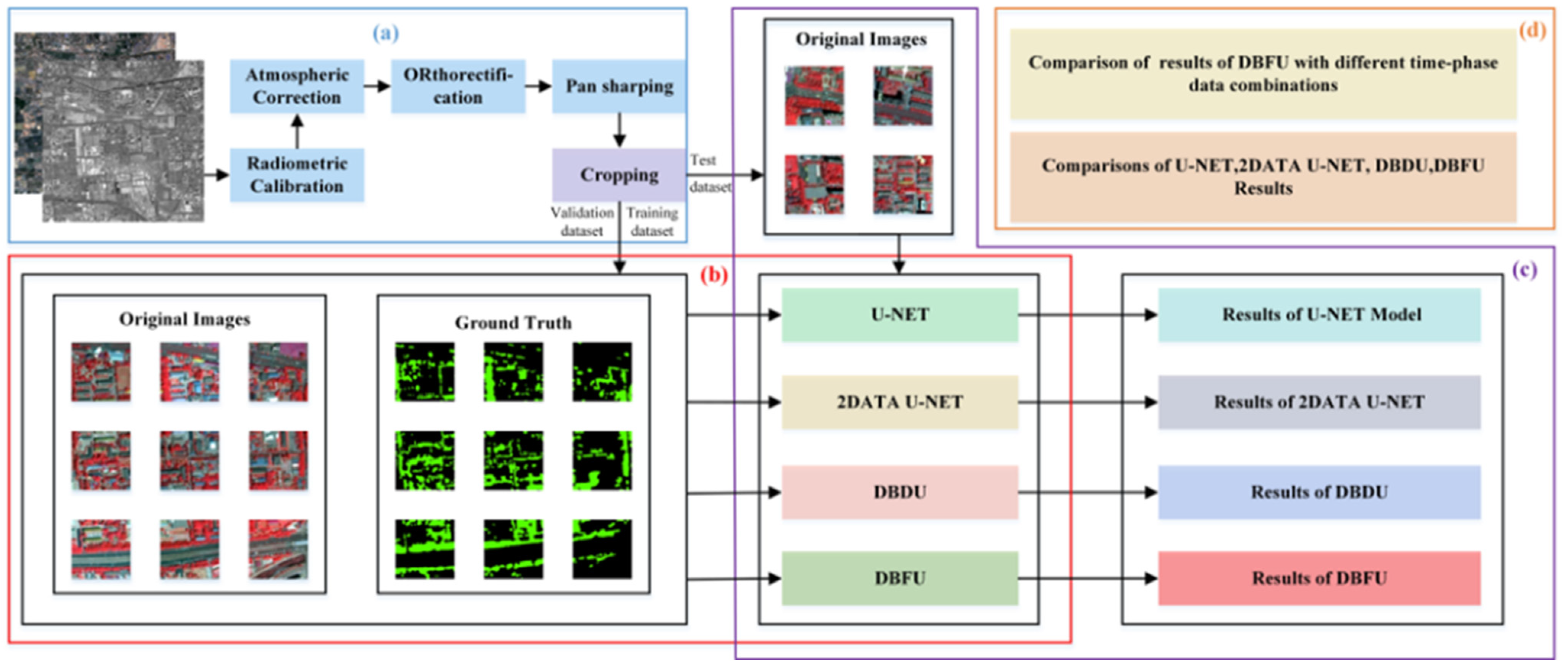
2. Materials and Methods
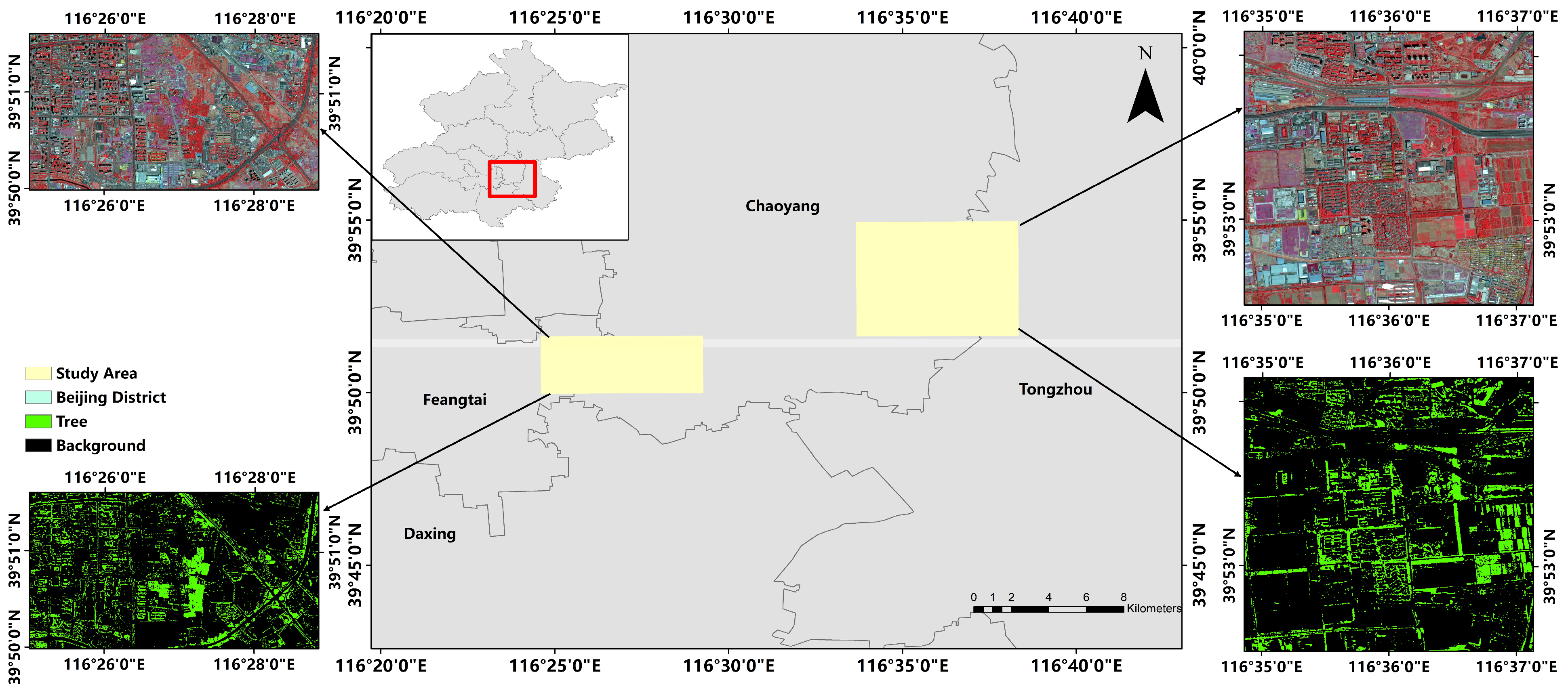
2.1. Study Area
2.2. Data Source and Processing
2.2.1. Multi-Temporal Satellite Images
2.2.2. Ground Truth
2.2.3. Sample Dataset
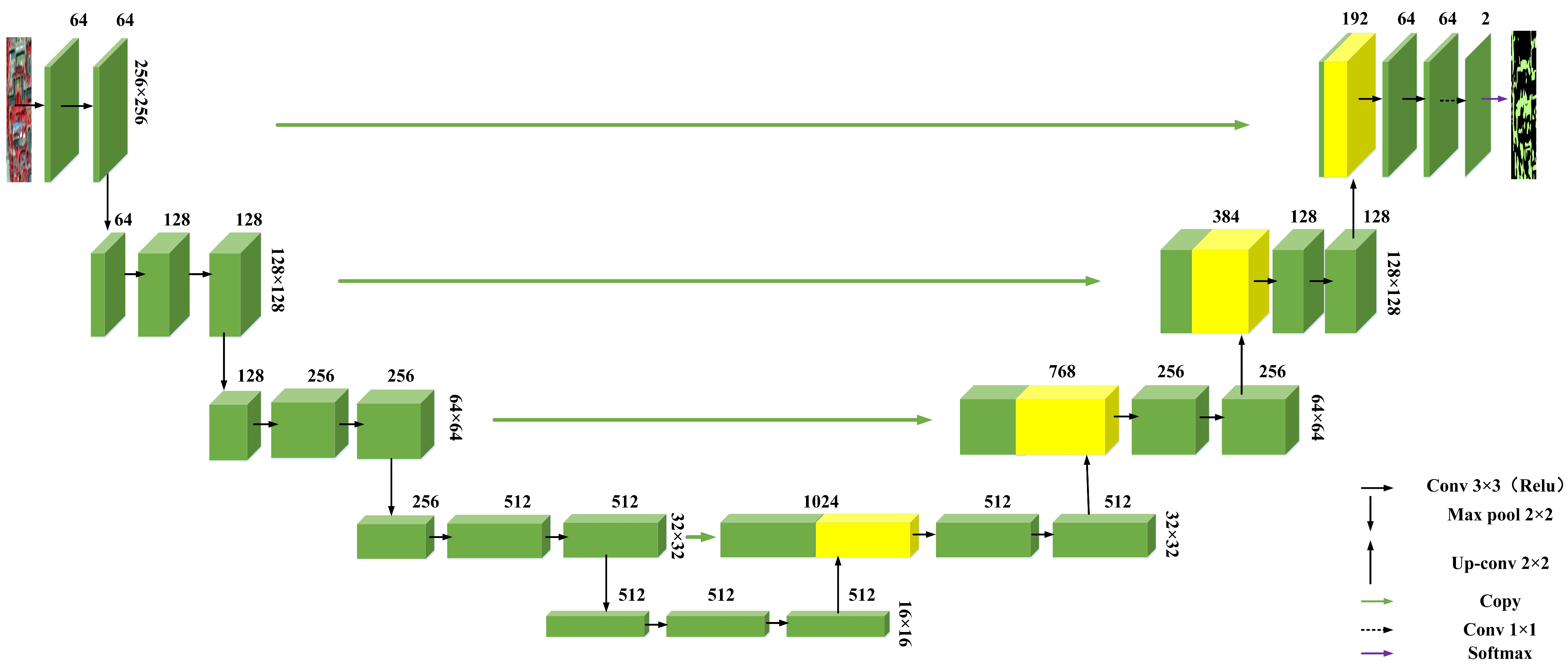
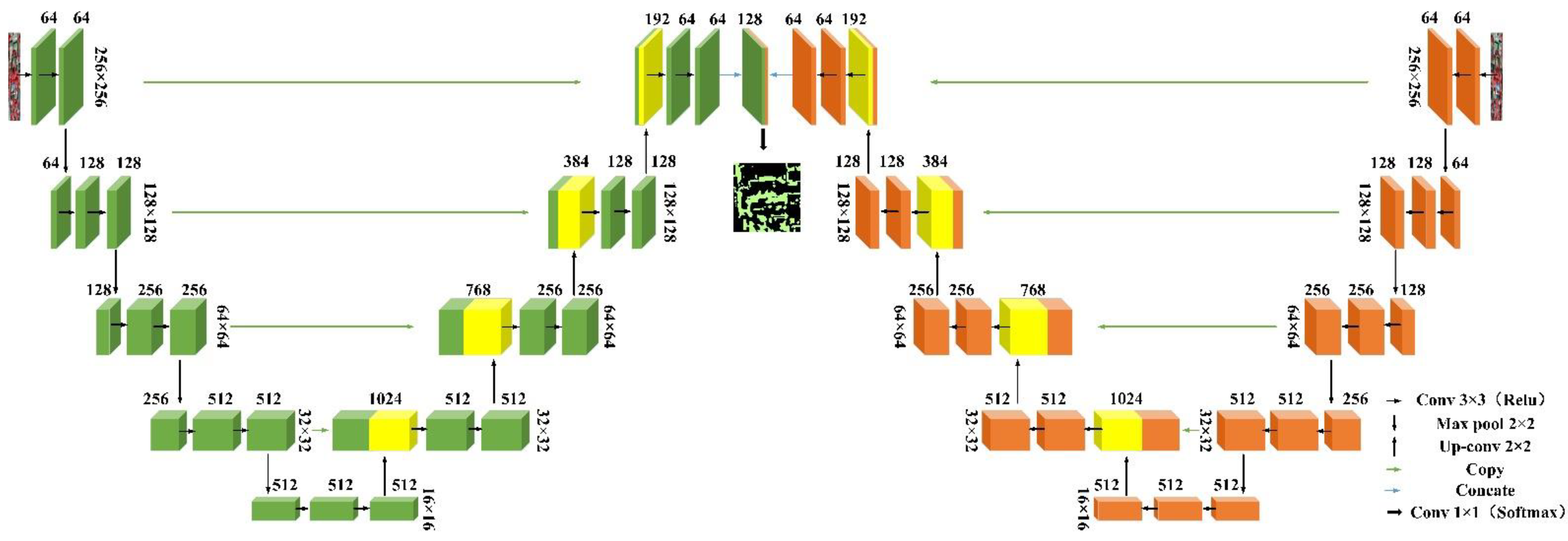
2.3. Networdk Structure
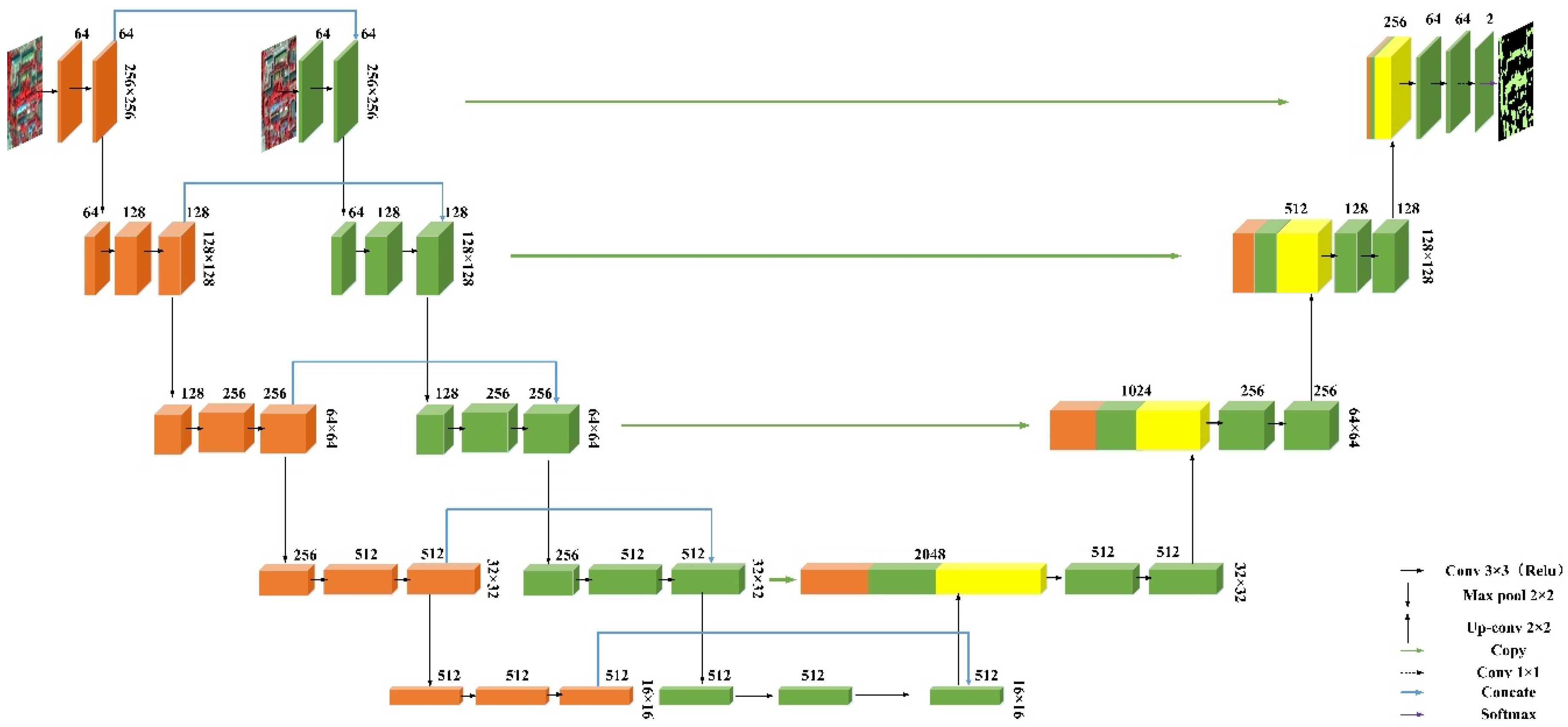
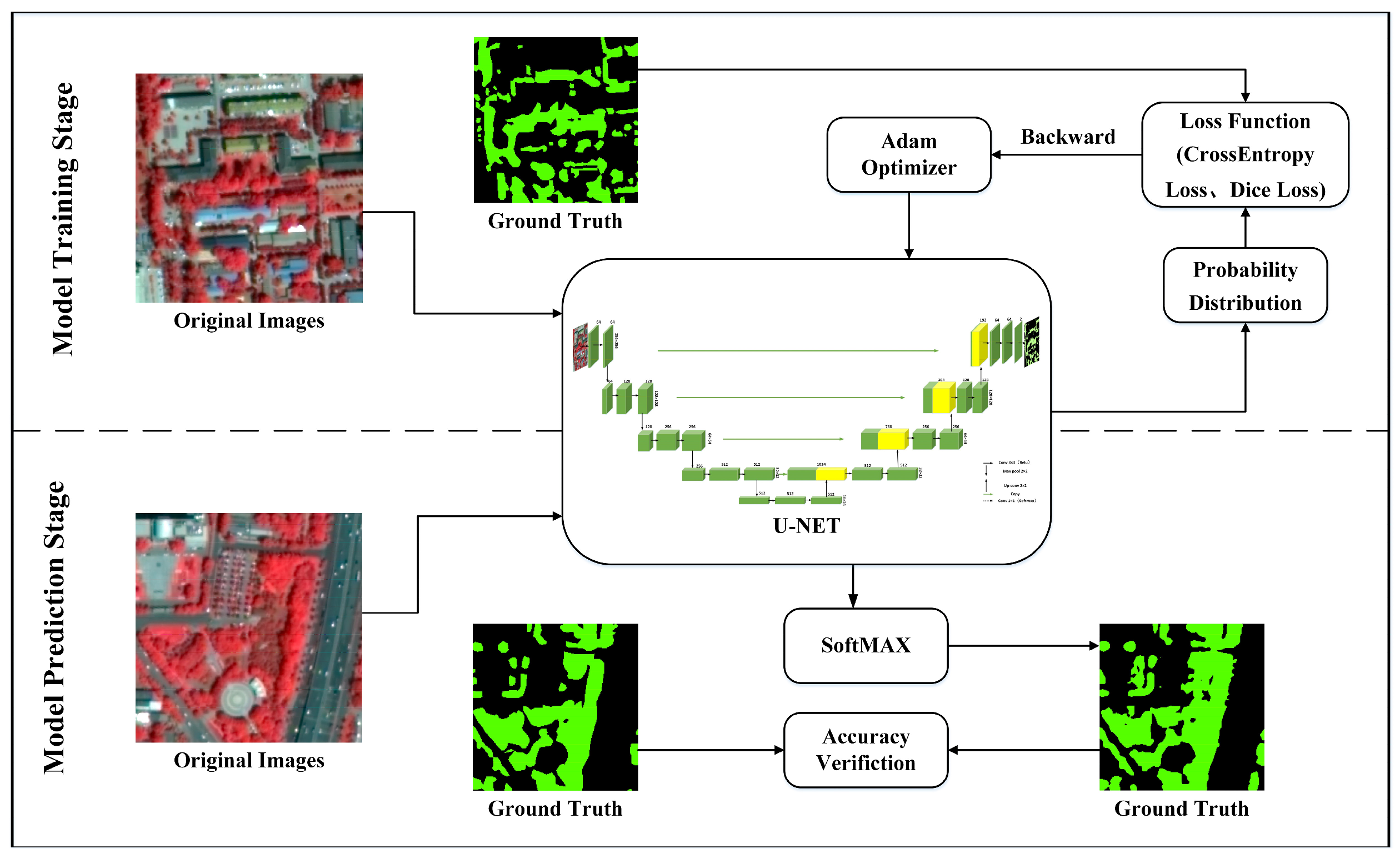
2.3.1. U-NET
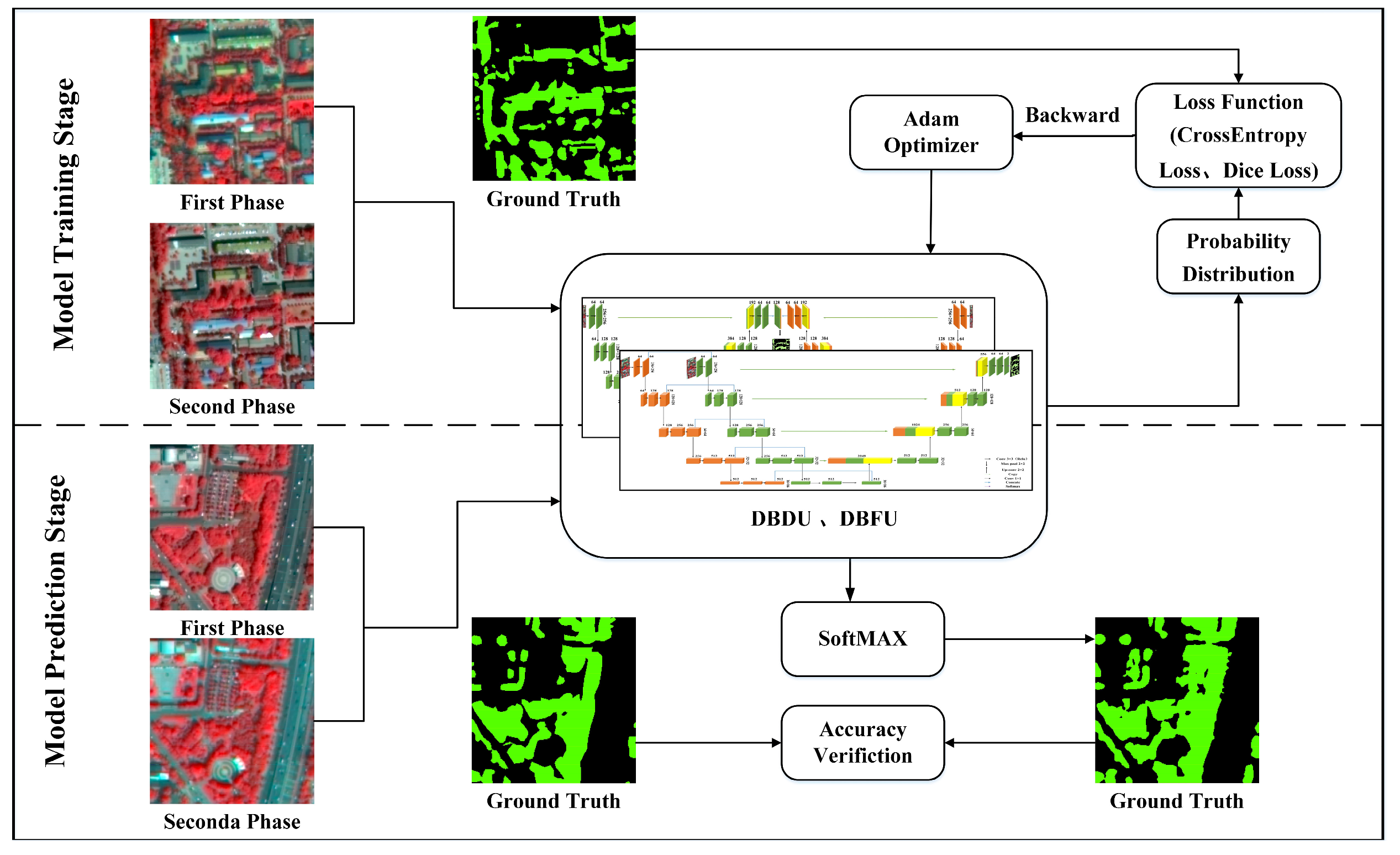
2.3.2. Double-Branch U-NET Based on Decision Fusion Strategy
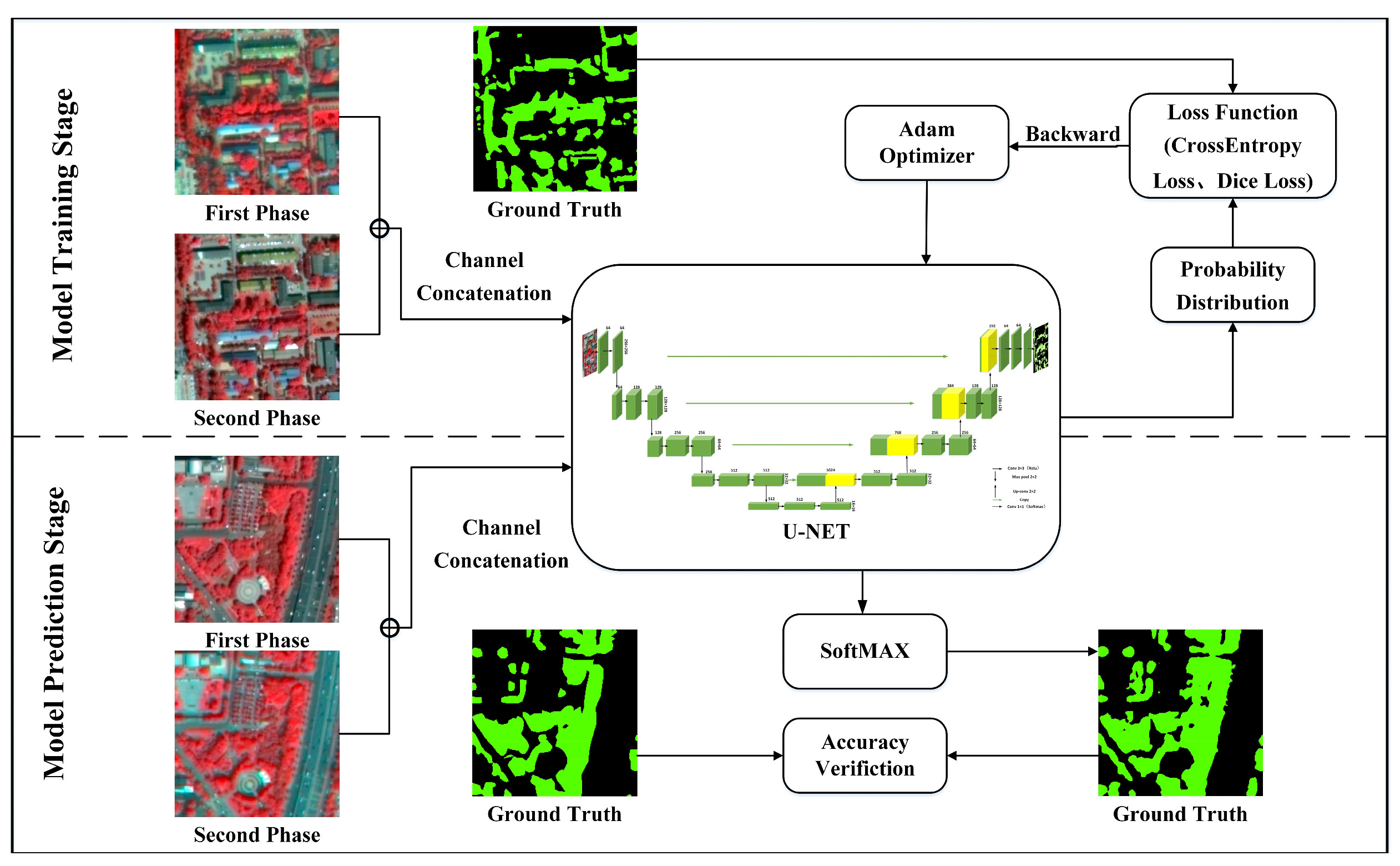
2.3.3. Double-Branch U-NET Based on Feature Fusion Strategy
2.3.4. Experimental Details
2.4. Loss Function
2.5. Evaluation Metrics
3. Experiments and Results
3.1. Comparison of Monotemporal Images and Multi-Temporal Images
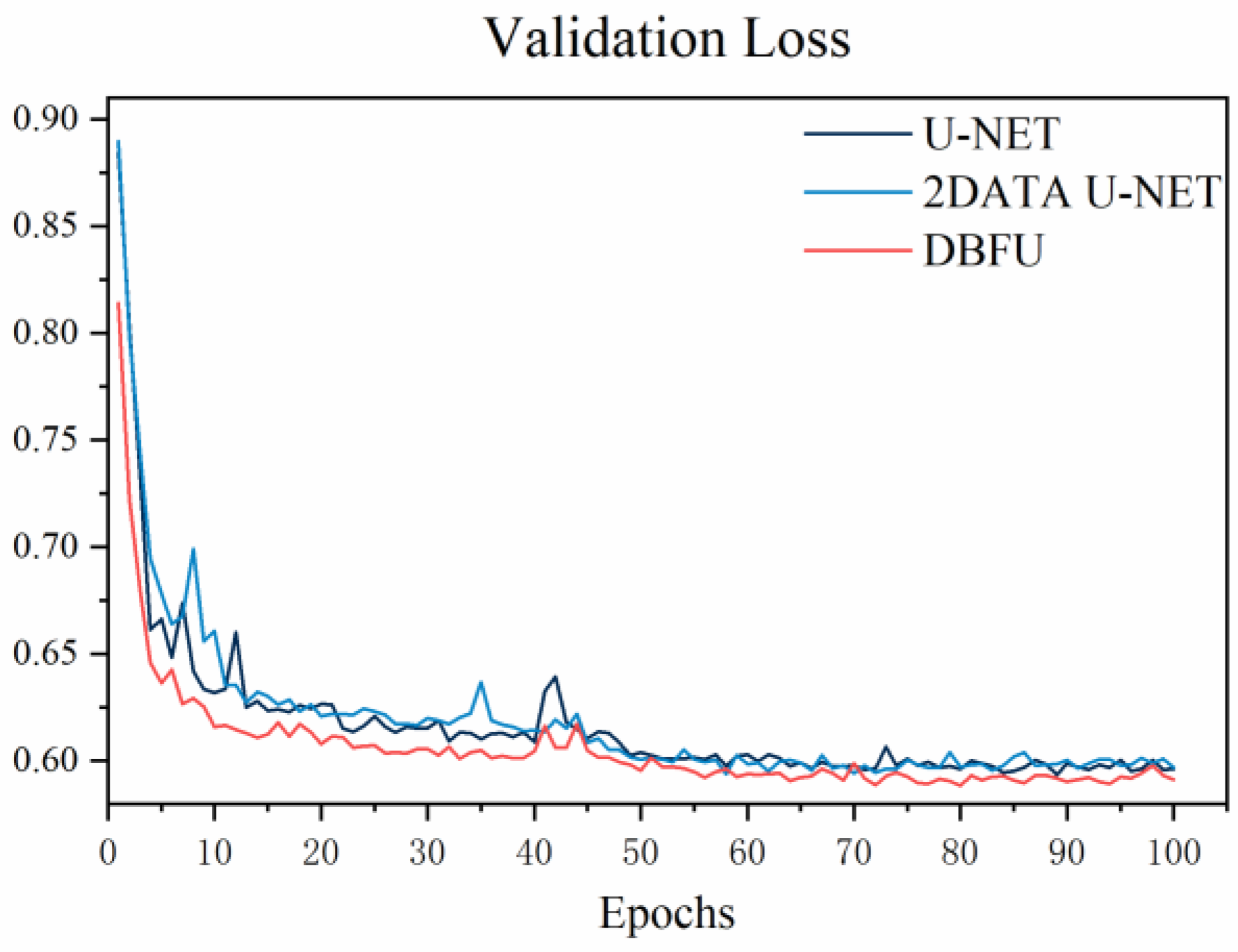
3.1.1. Comparison of Validation Loss
3.1.2. Comparison of Accuracy Metrics for Classification Results
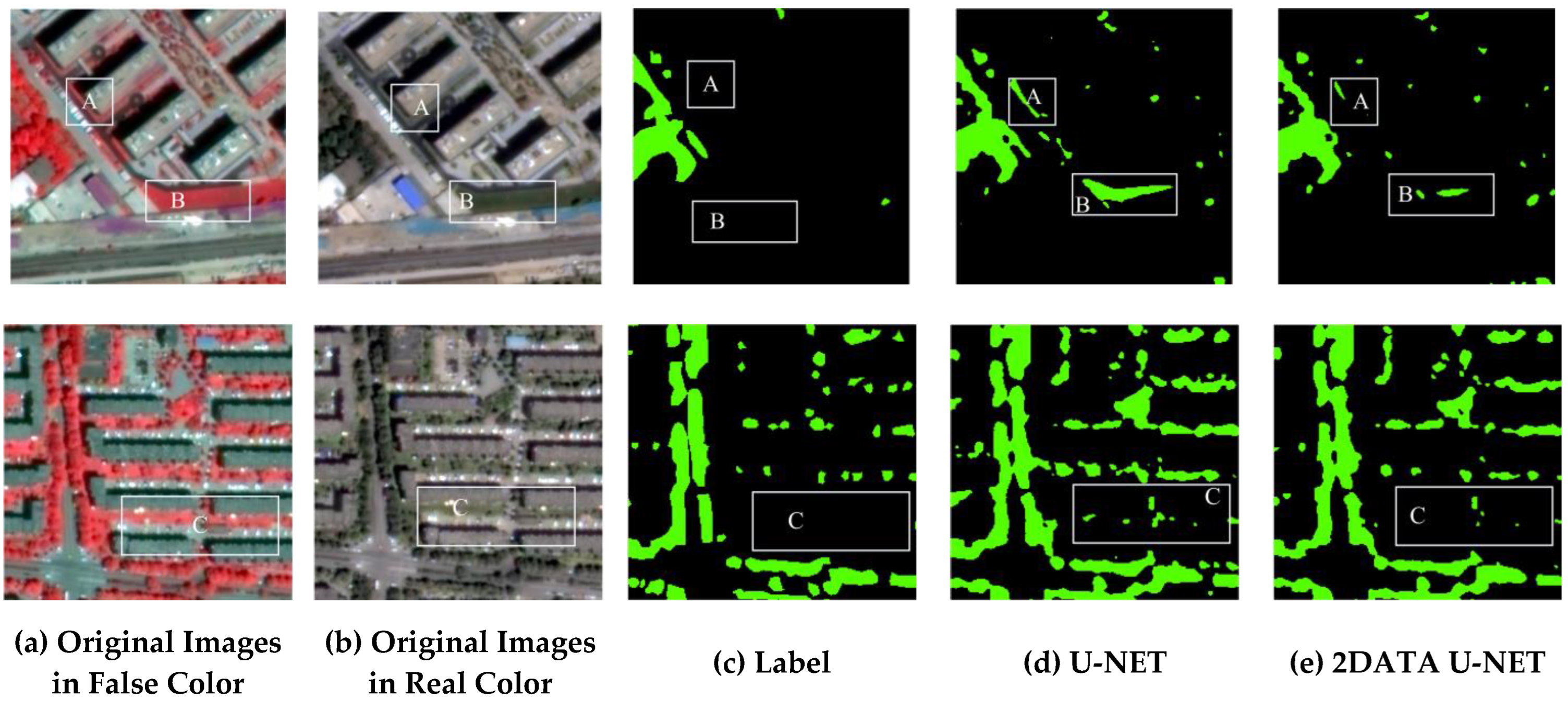
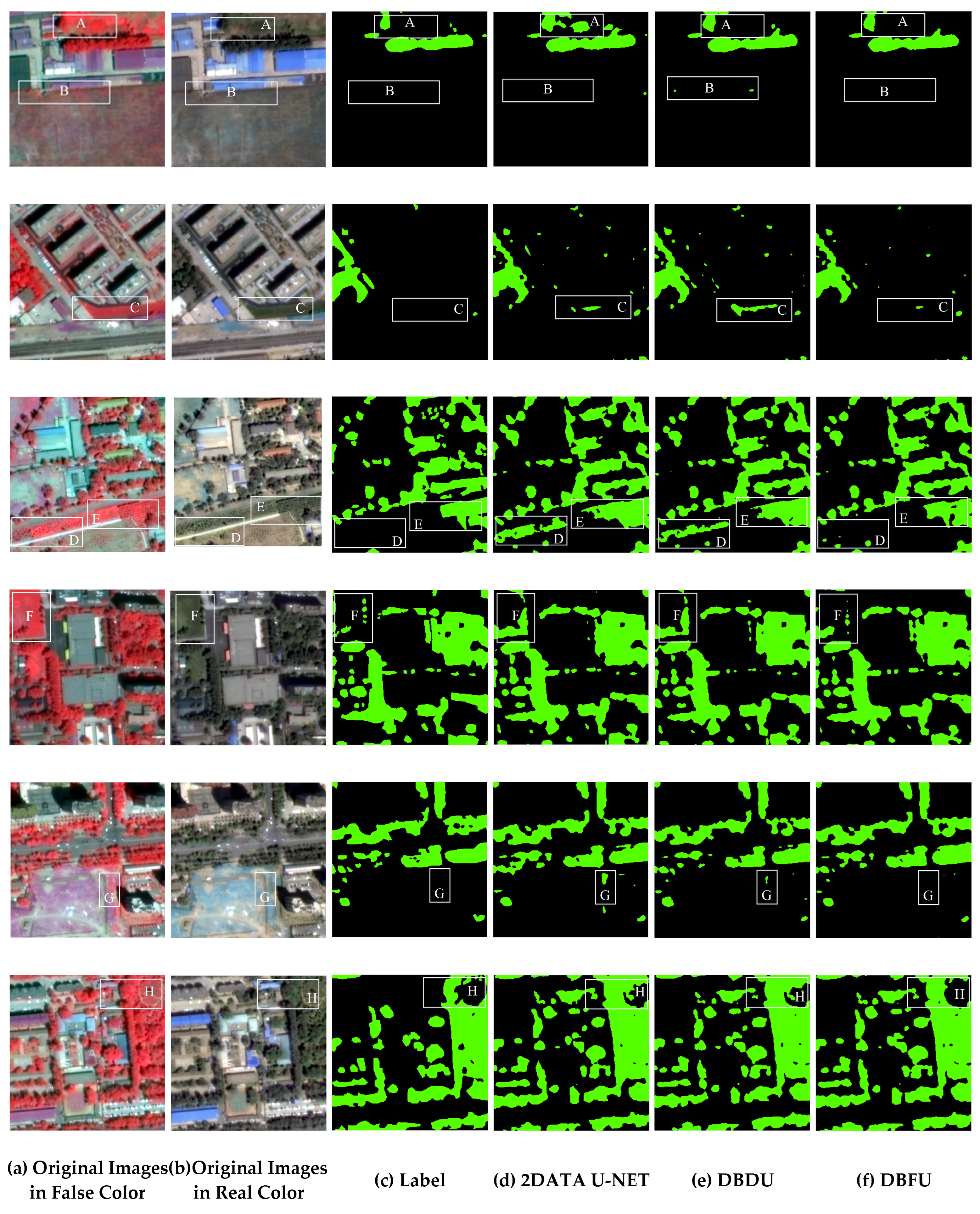
3.1.3. Visual Analysis of Classification Results
3.2. Performance of Double-Branch U-NET Based on Feature Fusion Strategy
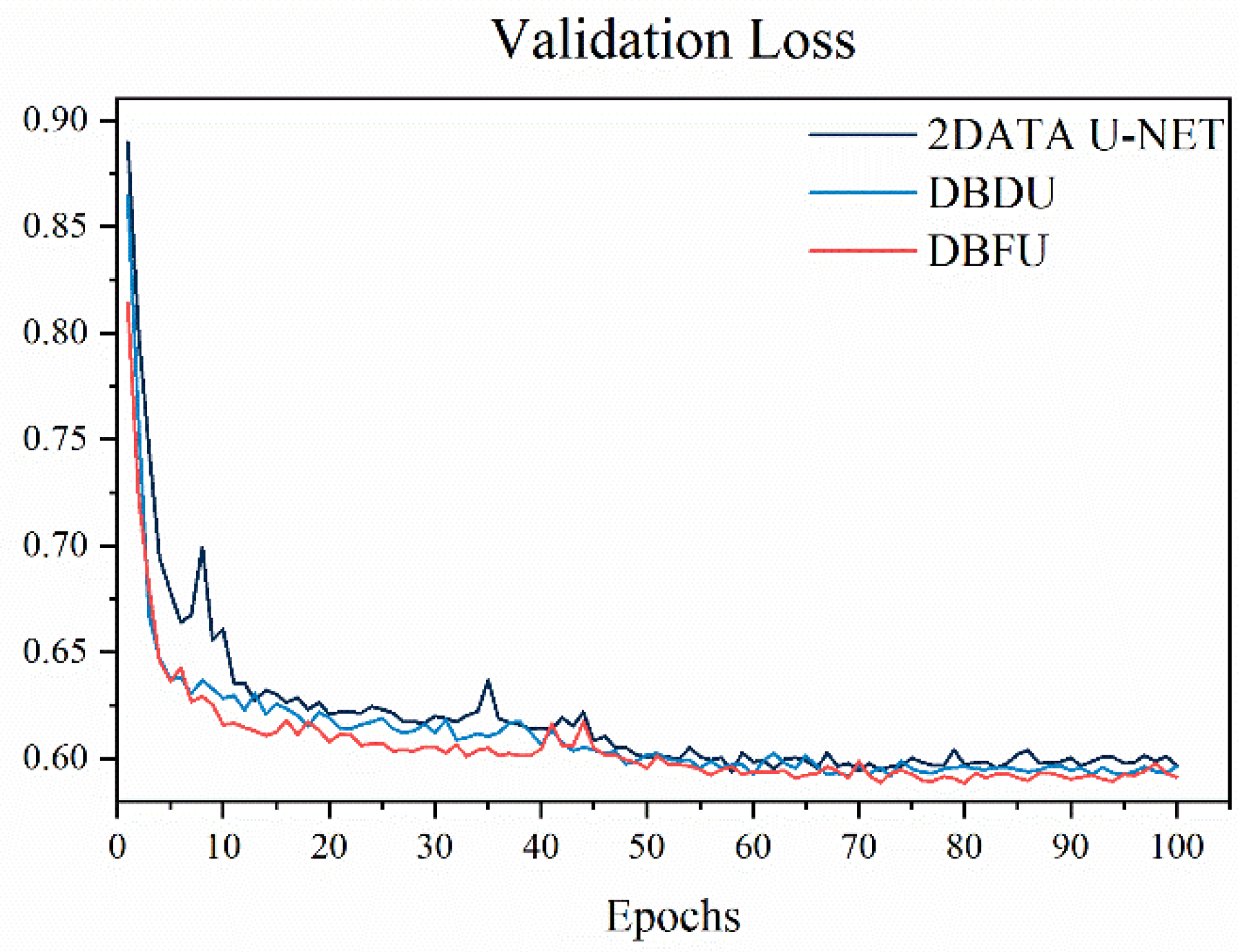
3.2.1. Comparison of Validation Loss
3.2.2. Comparison of Accuracy Metrics for Classification Results
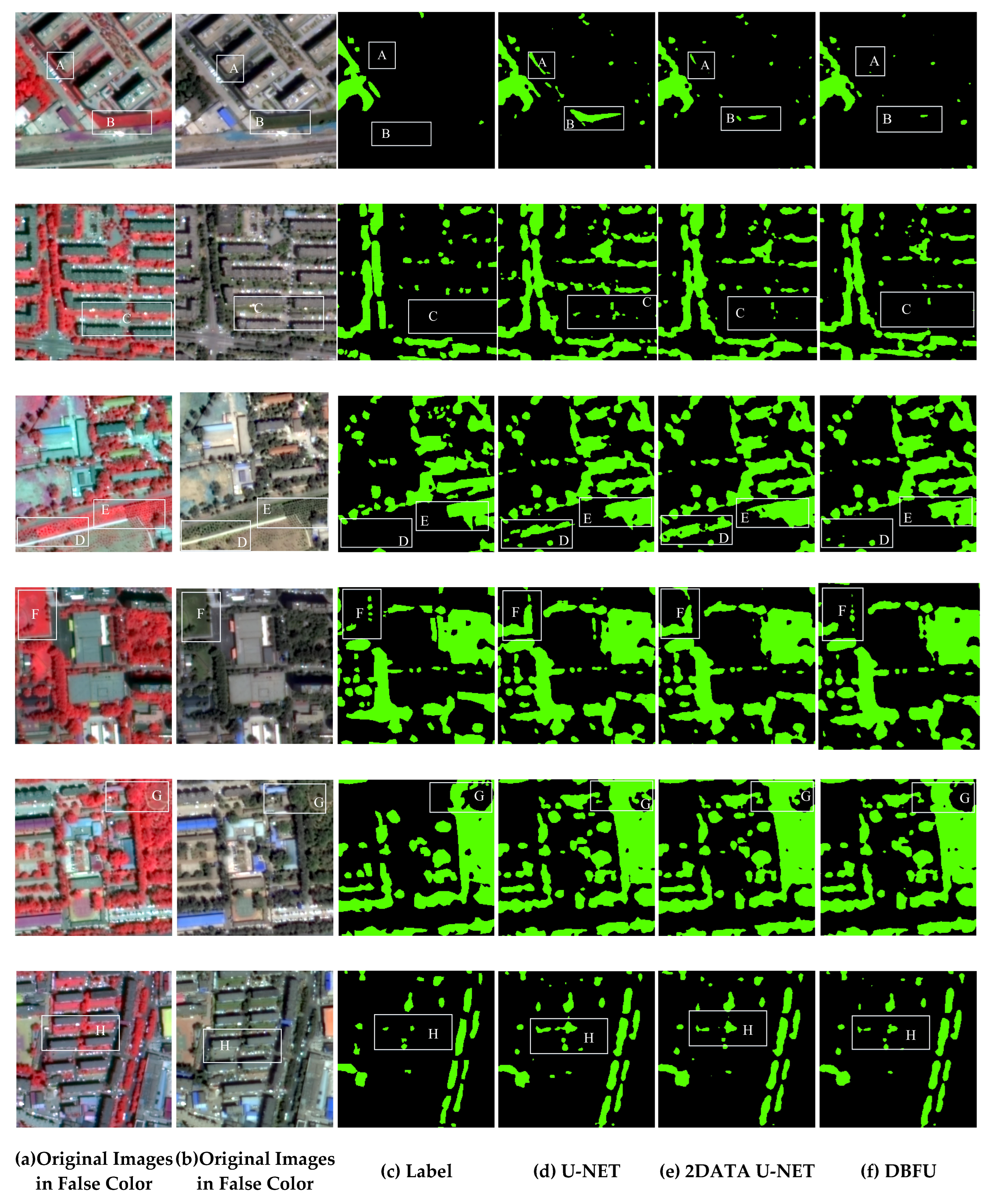
3.2.3. Visual Analysis of Classification Results
4. Discussion
4.1. Comparison of Different Data Fusion Strategies for Processing Multi-Temporal Images
4.1.1. Comparison of Validation Loss
4.1.2. Comparison of Accuracy Metrics for Classification Results
4.1.3. Visual Analysis of Classification Results
4.2. Comparison of Different Seasonal Combinations of Images
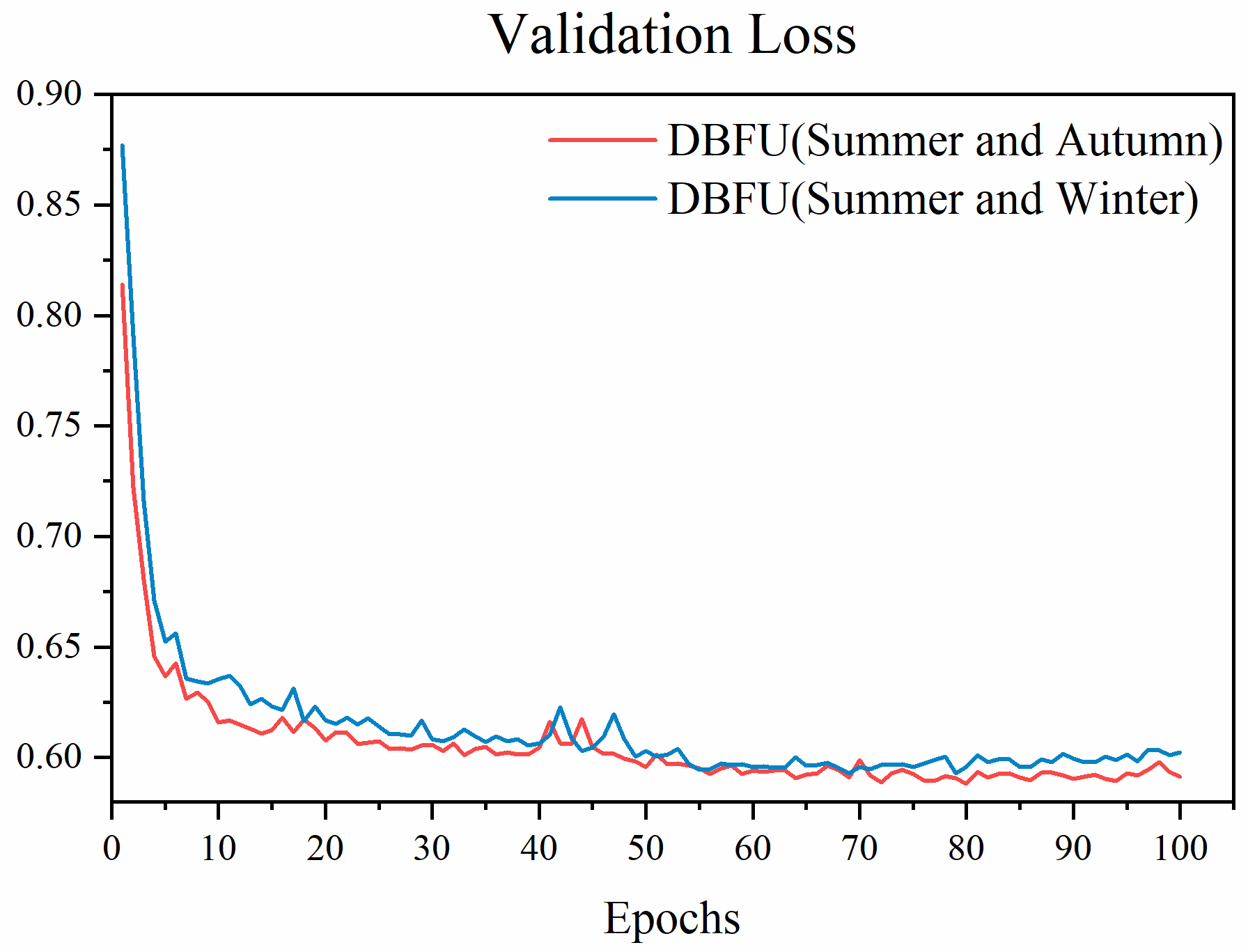
4.2.1. Comparison of Validation Loss
4.2.2. Comparison of Accuracy Metrics for Classification Results
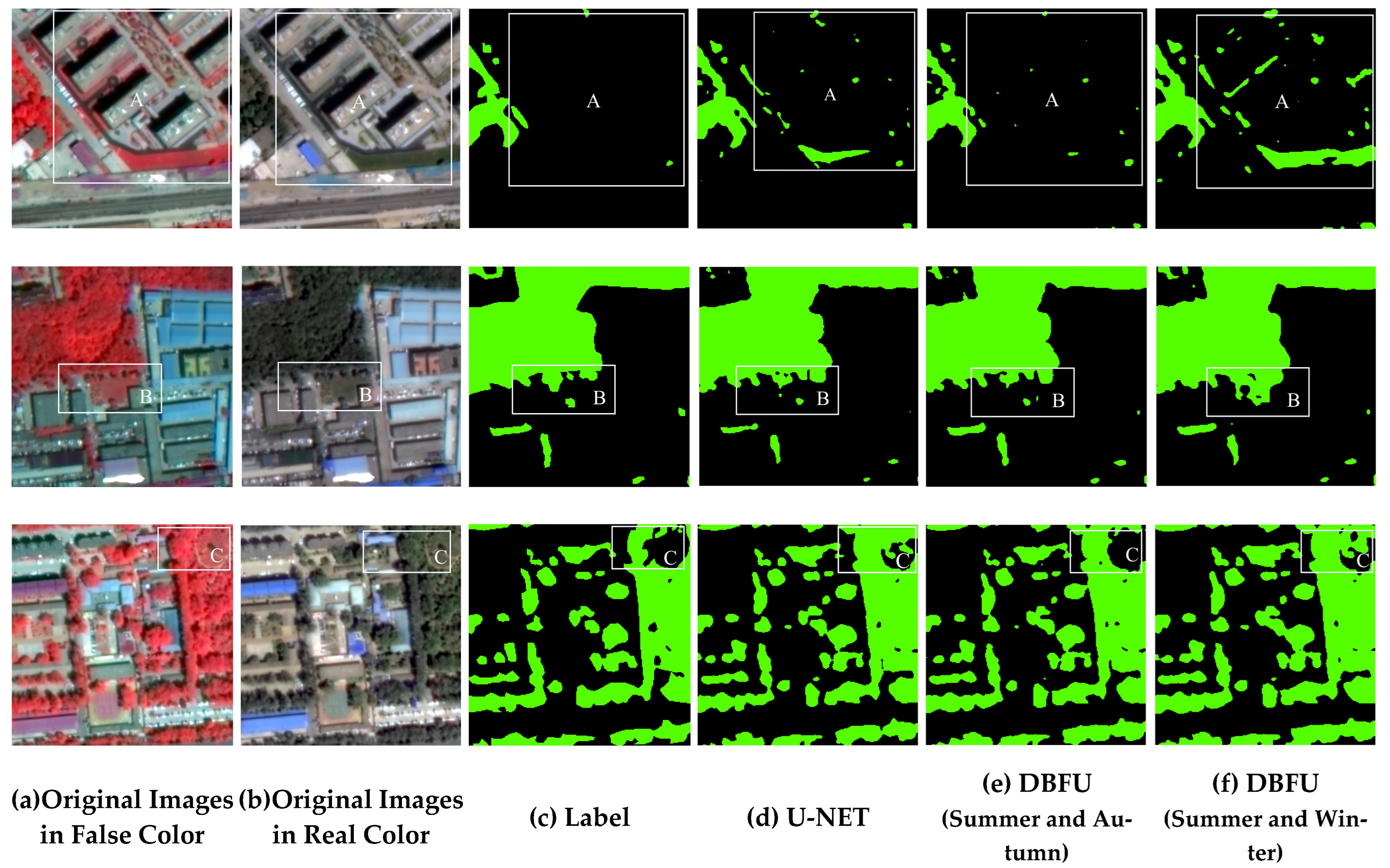
4.2.3. Visual Analysis of Classification Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nesbitt, L.; Hotte, N.; Barron, S.; Cowan, J.; Sheppard, S.R.J. The social and economic value of cultural ecosystem services provided by urban forests in North America: A review and suggestions for future research. Urban For. Urban Green. 2017, 25, 103–111. [Google Scholar] [CrossRef]
- Davies, H.J.; Doick, K.J.; Hudson, M.D.; Schaafsma, M.; Schreckenberg, K.; Valatin, G. Business attitudes towards funding ecosystem services provided by urban forests. Ecosyst. Serv. 2018, 32, 159–169. [Google Scholar] [CrossRef]
- United Nations Department for Economic and Social Affairs. World Urbanization Prospects 2018; United Nations Department for Economic and Social Affairs: New York, NY, USA, 2018. [Google Scholar]
- Bao, W.; Gong, A.; Zhao, Y.; Chen, S.; Ba, W.; He, Y. High-Precision Population Spatialization in Metropolises Based on Ensemble Learning: A Case Study of Beijing, China. Remote Sens. 2022, 14, 3654. [Google Scholar] [CrossRef]
- Bao, W.; Gong, A.; Zhang, T.; Zhao, Y.; Li, B.; Chen, S. Mapping Population Distribution with High Spatiotemporal Resolution in Beijing Using Baidu Heat Map Data. Remote Sens. 2023, 15, 458. [Google Scholar] [CrossRef]
- The World Bank. Available online: https://data.worldbank.org/indicator/SP.URB.TOTL.IN.ZS (accessed on 5 January 2023).
- Seto, K.C.; Sanchez-Rodriguez, R.; Fragkias, M. The New Geography of Contemporary Urbanization and the Environment. Annu. Rev. Envron. Resour. 2010, 35, 167–194. [Google Scholar] [CrossRef] [Green Version]
- Piotrowska, N.; Pazdur, A.; Pawełczyk, S.; Rakowski, A.Z.; Sensuła, B.; Tudyka, K. Human Activity recorded in carbon isotopic composition of atmospheric CO2 in Gliwice urban area and surroundings (southern Poland) in the years 2011–2013. Radiocarbon 2020, 62, 141–156. [Google Scholar] [CrossRef]
- Chaparro, L.; Terradas, J. Ecological Services of Urban Forest in Barcelona; Institut Municipal de Parcs i Jardins Ajuntament de Barcelona, Àrea de Medi Ambient: Barcelona, Spain, 2009. [Google Scholar]
- Sensuła, B.; Wilczyński, S.; Piotrowska, N. Bio-monitoring of the most industrialized area in Poland: Trees’ response to climate and anthropogenic environmental changes. In Proceedings of the 19th EGU General Assembly, Vienna, Austria, 23–28 April 2017; p. 2966. [Google Scholar]
- Nowak, D.J.; Greenfield, E.J.; Hoehn, R.E.; Lapoint, E. Carbon storage and sequestration by trees in urban and community areas of the United States. Environ. Pollut. 2013, 178, 229–236. [Google Scholar] [CrossRef] [Green Version]
- Moss, J.L.; Doick, K.J.; Smith, S.; Shahrestani, M. Influence of evaporative cooling by urban forests on cooling demand in cities. Urban For. Urban Green. 2019, 37, 65–73. [Google Scholar] [CrossRef] [Green Version]
- Baró, F.; Chaparro, L.; Gómez-Baggethun, E.; Langemeyer, J.; Nowak, D.J.; Terradas, J. Contribution of Ecosystem Services to Air Quality and Climate Change Mitigation Policies: The Case of Urban Forests in Barcelona, Spain. AMBIO 2014, 43, 466–479. [Google Scholar] [CrossRef] [Green Version]
- Tyrväinen, L.; Pauleit, S.; Seeland, K.; Vries, S.D. Benefits and Uses of Urban Forests and Trees; Springer: Berlin/Heidelberg, Germany, 2005; pp. 81–114. [Google Scholar]
- Groenewegen, P.P.; Van den Berg, A.E.; De Vries, S.; Verheij, R.A. Vitamin G: Effects of green space on health, well-being, and social safety. BMC Public Health 2006, 6, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Hurley, P.T.; Emery, M.R. Locating provisioning ecosystem services in urban forests: Forageable woody species in New York City, USA. Landsc. Urban Plan 2018, 170, 266–275. [Google Scholar] [CrossRef] [Green Version]
- Roeland, S.; Moretti, M.; Amorim, J.H.; Branquinho, C.; Fares, S.; Morelli, F.; Niinemets, Ü.; Paoletti, E.; Pinho, P.; Sgrigna, G. Towards an integrative approach to evaluate the environmental ecosystem services provided by urban forest. J. For. Res. 2019, 30, 1981–1996. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Chen, W.Y.; Sanesi, G.; Lafortezza, R. Remote Sensing in Urban Forestry: Recent Applications and Future Directions. Remote Sens. 2019, 11, 1144. [Google Scholar] [CrossRef] [Green Version]
- Grove, J.M.; Neil-Dunne, J.O.; Pelletier, K.; Nowak, D.; Walton, J. A Report on New York City’s Present and Possible Urban Tree Canopy; United States Department of Agriculture, Forest Service: South Burlington, VT, USA, 2006. [Google Scholar]
- Myeong, S.; Nowak, D.J.; Duggin, M.J. A temporal analysis of urban forest carbon storage using remote sensing. Remote Sens. Environ. 2006, 101, 277–282. [Google Scholar] [CrossRef]
- Alonzo, M.; McFadden, J.P.; Nowak, D.J.; Roberts, D.A. Mapping urban forest structure and function using hyperspectral imagery and lidar data. Urban For. Urban Green. 2016, 17, 135–147. [Google Scholar] [CrossRef] [Green Version]
- Lafortezza, R.; Giannico, V. Combining high-resolution images and LiDAR data to model ecosystem services perception in compact urban systems. Ecol. Indic. 2019, 96, 87–98. [Google Scholar] [CrossRef]
- Shojanoori, R.; Shafri, H. Review on the Use of Remote Sensing for Urban Forest Monitoring. Arboric. Urban For. 2016, 42, 400–417. [Google Scholar] [CrossRef]
- Jensen, R.R.; Hardin, P.J.; Bekker, M.; Farnes, D.S.; Lulla, V.; Hardin, A. Modeling urban leaf area index with AISA+ hyperspectral data. Appl. Geogr. 2009, 29, 320–332. [Google Scholar] [CrossRef]
- Pickett, S.T.A.; Cadenasso, M.L.; Rosi-Marshall, E.J.; Belt, K.T.; Groffman, P.M.; Grove, J.M.; Irwin, E.G.; Kaushal, S.S.; LaDeau, S.L.; Nilon, C.H.; et al. Dynamic heterogeneity: A framework to promote ecological integration and hypothesis generation in urban systems. Urban Ecosyst. 2017, 20, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Cadenasso, M.L.; Pickett, S.T.; Schwarz, K. Spatial heterogeneity in urban ecosystems: Reconceptualizing land cover and a framework for classification. Front. Ecol. Environ. 2007, 5, 80–88. [Google Scholar] [CrossRef]
- Martins, J.A.C.; Nogueira, K.; Osco, L.P.; Gomes, F.D.G.; Furuya, D.E.G.; Gonçalves, W.N.; Sant Ana, D.A.; Ramos, A.P.M.; Liesenberg, V.; Dos Santos, J.A.; et al. Semantic Segmentation of Tree-Canopy in Urban Environment with Pixel-Wise Deep Learning. Remote Sens. 2021, 13, 3054. [Google Scholar]
- Pu, R.L.; Landry, S. A comparative analysis of high spatial resolution IKONOS and WorldView-2 imagery for mapping urban tree species. Remote Sens. Environ. 2012, 124, 516–533. [Google Scholar] [CrossRef]
- Hamerly, G.; Elkan, C. Learning the k in k-means. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2003; p. 16. [Google Scholar]
- Memarsadeghi, N.; Mount, D.M.; Netanyahu, N.S.; Le Moigne, J. A fast implementation of the ISODATA clustering algorithm. Int. J. Comput. Geom. Appl. 2007, 17, 71–103. [Google Scholar]
- Maurya, K.; Mahajan, S.; Chaube, N. Remote sensing techniques: Mapping and monitoring of mangrove ecosystem—A review. Complex Intell. Syst. 2021, 7, 2797–2818. [Google Scholar] [CrossRef]
- Xu, Z.; Zhou, Y.; Wang, S.; Wang, L.; Li, F.; Wang, S.; Wang, Z. A Novel Intelligent Classification Method for Urban Green Space Based on High-Resolution Remote Sensing Images. Remote Sens. 2020, 12, 3845. [Google Scholar]
- Myles, A.J.; Feudale, R.N.; Liu, Y.; Woody, N.A.; Brown, S.D. An introduction to decision tree modeling. J. Chemom. 2004, 18, 275–285. [Google Scholar]
- Biau, G.; Scornet, E. A random forest guided tour. Test 2016, 25, 197–227. [Google Scholar] [CrossRef] [Green Version]
- Noble, W.S. What is a support vector machine? Nat. Biotechnol. 2006, 24, 1565–1567. [Google Scholar] [CrossRef]
- Bruzzone, L.; Prieto, D.F. Unsupervised retraining of a maximum likelihood classifier for the analysis of multitemporal remote sensing images. IEEE Trans. Geosci. Remote 2001, 39, 456–460. [Google Scholar] [CrossRef] [Green Version]
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in vegetation remote sensing. ISPRS J. Photogramm. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Janiesch, C.; Zschech, P.; Heinrich, K. Machine learning and deep learning. Electron. Mark. 2021, 31, 685–695. [Google Scholar] [CrossRef]
- Shinde, P.P.; Shah, S. A Review of Machine Learning and Deep Learning Applications; IEEE: Washington, DC, USA, 2018; pp. 1–6. [Google Scholar]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [Green Version]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhang, H.; Xue, X.; Jiang, Y.; Shen, Q. Deep learning for remote sensing image classification: A survey. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2018, 8, e1264. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Han, L.; Han, L.; Zhu, L. How Well Do Deep Learning-Based Methods for Land Cover Classification and Object Detection Perform on High Resolution Remote Sensing Imagery? Remote Sens. 2020, 12, 417. [Google Scholar] [CrossRef] [Green Version]
- Pluto-Kossakowska, J. Review on Multitemporal Classification Methods of Satellite Images for Crop and Arable Land Recognition. Agriculture 2021, 11, 999. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, Y.; Wang, F.; Wang, S.; Xu, Z. SDGH-Net: Ship Detection in Optical Remote Sensing Images Based on Gaussian Heatmap Regression. Remote Sens. 2021, 13, 499. [Google Scholar] [CrossRef]
- O’Shea, K.; Nash, R. An introduction to convolutional neural networks. arXiv 2015, arXiv:1511.08458. [Google Scholar]
- Gu, J.; Wang, Z.; Kuen, J.; Ma, L.; Shahroudy, A.; Shuai, B.; Liu, T.; Wang, X.; Wang, G.; Cai, J. Recent advances in convolutional neural networks. Pattern Recogn. 2018, 77, 354–377. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Liu, F.; Yang, W.; Peng, S.; Zhou, J. A survey of convolutional neural networks: Analysis, applications, and prospects. IEEE Trans. Neural Networks Learn. 2021, 33, 6999–7019. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Bragagnolo, L.; Da Silva, R.V.; Grzybowski, J.M.V. Amazon forest cover change mapping based on semantic segmentation by U-Nets. Ecol. Inform. 2021, 62, 101279. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the 18th International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI), Munich, Germany, 5–9 October 2015; Volume 9351, pp. 234–241. [Google Scholar]
- Chen, L.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. 2017, 40, 834–848. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, L.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking atrous convolution for semantic image segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]
- Chen, L.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the 15th European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Wagner, F.H.; Hirye, M.C.M. Tree Cover for the Year 2010 of the Metropolitan Region of São Paulo, Brazil. Data 2019, 4, 145. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Fan, C.; Xian, M. Application and Evaluation of a Deep Learning Architecture to Urban Tree Canopy Mapping. Remote Sens. 2021, 13, 1749. [Google Scholar] [CrossRef]
- Piao, S.; Liu, Q.; Chen, A.; Janssens, I.A.; Fu, Y.; Dai, J.; Liu, L.; Lian, X.U.; Shen, M.; Zhu, X. Plant phenology and global climate change: Current progresses and challenges. Glob. Chang. Biol. 2019, 25, 1922–1940. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Friedl, M.A.; Schaaf, C.B.; Strahler, A.H.; Hodges, J.C.; Gao, F.; Reed, B.C.; Huete, A. Monitoring vegetation phenology using MODIS. Remote Sens. Environ. 2003, 84, 471–475. [Google Scholar] [CrossRef]
- Senf, C.; Leitão, P.J.; Pflugmacher, D.; van der Linden, S.; Hostert, P. Mapping land cover in complex Mediterranean landscapes using Landsat: Improved classification accuracies from integrating multi-seasonal and synthetic imagery. Remote Sens. Environ. 2015, 156, 527–536. [Google Scholar] [CrossRef]
- Yan, J.; Zhou, W.; Han, L.; Qian, Y. Mapping vegetation functional types in urban areas with WorldView-2 imagery: Integrating object-based classification with phenology. Urban For. Urban Green. 2018, 31, 230–240. [Google Scholar] [CrossRef]
- Ulsig, L.; Nichol, C.J.; Huemmrich, K.F.; Landis, D.R.; Middleton, E.M.; Lyapustin, A.I.; Mammarella, I.; Levula, J.; Porcar-Castell, A. Detecting inter-annual variations in the phenology of evergreen conifers using long-term MODIS vegetation index time series. Remote Sens. 2017, 9, 49. [Google Scholar] [CrossRef] [Green Version]
- Pu, R. Mapping urban forest tree species using IKONOS imagery: Preliminary results. Environ. Monit. Assess 2011, 172, 199–214. [Google Scholar] [CrossRef]
- Pu, R.; Landry, S.; Yu, Q. Assessing the potential of multi-seasonal high resolution Pléiades satellite imagery for mapping urban tree species. Int. J. Appl. Earth Obs. 2018, 71, 144–158. [Google Scholar]
- Xu, X.; Li, W.; Ran, Q.; Du, Q.; Gao, L.; Zhang, B. Multisource Remote Sensing Data Classification Based on Convolutional Neural Network. IEEE Trans. Geosci. Remote 2018, 56, 937–949. [Google Scholar] [CrossRef]
- Gaetano, R.; Ienco, D.; Ose, K.; Cresson, R. A Two-Branch CNN Architecture for Land Cover Classification of PAN and MS Imagery. Remote Sens. 2018, 10, 1746. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Li, Z.; Chen, E.; Zhang, X.; Zhao, L.; Xu, E.; Hou, Y.; Liu, L. A Deep Fusion uNet for Mapping Forests at Tree Species Levels with Multi-Temporal High Spatial Resolution Satellite Imagery. Remote Sens. 2021, 13, 3613. [Google Scholar] [CrossRef]
- Li, C.; Hang, R.; Rasti, B. EMFNet: Enhanced Multisource Fusion Network for Land Cover Classification. IEEE J. Stars 2021, 14, 4381–4389. [Google Scholar] [CrossRef]
- Zhu, X.X.; Qiu, C.; Hu, J.; Shi, Y.; Wang, Y.; Schmitt, M.; Taubenböck, H. The urban morphology on our planet—Global perspectives from space. Remote Sens. Environ. 2022, 269, 112794. [Google Scholar] [CrossRef]
- Wang, X.; Huang, J.; Feng, Q.; Yin, D. Winter Wheat Yield Prediction at County Level and Uncertainty Analysis in Main Wheat-Producing Regions of China with Deep Learning Approaches. Remote Sens. 2020, 12, 1744. [Google Scholar] [CrossRef]
- Guo, Y.; Li, Z.; Chen, E.; Zhang, X.; Zhao, L.; Xu, E.; Hou, Y.; Sun, R. An End-to-End Deep Fusion Model for Mapping Forests at Tree Species Levels with High Spatial Resolution Satellite Imagery. Remote Sens. 2020, 12, 3324. [Google Scholar] [CrossRef]
- Tan, Y.; Xiong, S.; Li, Y. Automatic Extraction of Built-Up Areas From Panchromatic and Multispectral Remote Sensing Images Using Double-Stream Deep Convolutional Neural Networks. IEEE J. Stars 2018, 11, 3988–4004. [Google Scholar] [CrossRef]
- Ali, A.V.; Comai, S.; Matteucci, M. Deep Learning for Land Use and Land Cover Classification Based on Hyperspectral and Multispectral Earth Observation Data: A Review. Remote Sens. 2020, 12, 2495. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, L.; Han, J.; Zha, Y.; Zhu, P. Deep convolutional neural networks for rice grain yield estimation at the ripening stage using UAV-based remotely sensed images. Field Crop. Res. 2019, 235, 142–153. [Google Scholar] [CrossRef]
- Beijing Municipal Forestry and Parks Bureau. The Report on Work Completion in 2021 of Beijing Municipal Forestry and Parks Bureau. Available online: http://yllhj.beijing.gov.cn/zwgk/sx/202201/t20220106_2584218.shtml (accessed on 13 August 2022).
- Bernstein, L.S.; Jin, X.; Gregor, B.; Adler-Golden, S.M. Quick atmospheric correction code: Algorithm description and recent upgrades. Opt. Eng. 2012, 51, 111719. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- De Boer, P.; Kroese, D.P.; Mannor, S.; Rubinstein, R.Y. A tutorial on the cross-entropy method. Ann. Oper. Res. 2005, 134, 19–67. [Google Scholar] [CrossRef]
- Lin, T.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2998. [Google Scholar]
- Milletari, F.; Navab, N.; Ahmadi, S. V-net: Fully Convolutional Neural Networks for Volumetric Medical Image Segmentation; IEEE: Washington, DC, USA, 2016; pp. 565–571. [Google Scholar]
- Sudre, C.H.; Li, W.; Vercauteren, T.; Ourselin, S.; Jorge Cardoso, M. Generalised Dice Overlap as a Deep Learning Loss Function for Highly Unbalanced Segmentations; Springer: Berlin/Heidelberg, Germany, 2017; pp. 240–248. [Google Scholar]
- Drozdzal, M.; Vorontsov, E.; Chartrand, G.; Kadoury, S.; Pal, C. The Importance of Skip Connections in Biomedical Image Segmentation; Springer: Berlin/Heidelberg, Germany, 2016; pp. 179–187. [Google Scholar]
- Chen, M.; Wu, J.; Liu, L.; Zhao, W.; Tian, F.; Shen, Q.; Zhao, B.; Du, R. DR-Net: An Improved Network for Building Extraction from High Resolution Remote Sensing Image. Remote Sens. 2021, 13, 294. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Batch Size | Epochs of Freeze Training | Initial Learning Rate | Epochs of Unfreeze Training | Initial Learning Rate | Ratio of Learning Rate Decay | |
|---|---|---|---|---|---|---|
| U-NET | 8 | 1–40 | 0.0001 | 41–100 | 0.00001 | 0.96 |
| U-NET (Multi-temporal) | 8 | 1–40 | 0.0001 | 41–100 | 0.00001 | 0.96 |
| DBDU | 8 | 1–40 | 0.0001 | 41–100 | 0.00001 | 0.96 |
| DBFU | 8 | 1–40 | 0.0001 | 41–100 | 0.00001 | 0.96 |
| Ground Truth Prediction | Tree | Background |
|---|---|---|
| Tree | TP | FP |
| Background | FN | TN |
| Methods | OA | Precision | Recall | F1-Score | IOU |
| U-NET (Mono-temporal) | 95.1% | 85.7% | 88.3% | 87.0% | 76.9% |
| 2DATA U-NET (Multi-temporal) | 95.3% | 85.9% | 88.9% | 87.4% | 77.5% |
| Methods | OA | Precision | Recall | F1-Score | IOU |
|---|---|---|---|---|---|
| U-NET | 95.1% | 85.7% | 88.3% | 87.0% | 76.9% |
| 2DATA U-NET | 95.3% | 85.9% | 88.9% | 87.4% | 77.5% |
| DBFU | 95.8% | 88.3% | 88.5% | 88.3% | 79.2% |
| Methods | OA | Precision | Recall | F1-Score | IOU |
|---|---|---|---|---|---|
| 2DATA U-NET | 95.3% | 85.9% | 88.9% | 87.4% | 77.5% |
| DBDU | 95.4% | 87.7% | 87.3% | 87.5% | 77.8% |
| DBFU | 95.8% | 88.3% | 88.5% | 88.3% | 79.2% |
| Methods | OA | Precision | Recall | F1-Score | IOU |
| DBFU (Summer and Autumn) | 95.8% | 88.3% | 88.5% | 88.3% | 79.2% |
| DBFU (Summer and Winter) | 94.5% | 82.3% | 89.5% | 85.7% | 75.0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Chen, M.; Zhao, B.; Mao, T.; Wu, J.; Bao, W. Urban Tree Canopy Mapping Based on Double-Branch Convolutional Neural Network and Multi-Temporal High Spatial Resolution Satellite Imagery. Remote Sens. 2023, 15, 765. https://doi.org/10.3390/rs15030765
Chen S, Chen M, Zhao B, Mao T, Wu J, Bao W. Urban Tree Canopy Mapping Based on Double-Branch Convolutional Neural Network and Multi-Temporal High Spatial Resolution Satellite Imagery. Remote Sensing. 2023; 15(3):765. https://doi.org/10.3390/rs15030765
Chicago/Turabian StyleChen, Shuaiqiang, Meng Chen, Bingyu Zhao, Ting Mao, Jianjun Wu, and Wenxuan Bao. 2023. "Urban Tree Canopy Mapping Based on Double-Branch Convolutional Neural Network and Multi-Temporal High Spatial Resolution Satellite Imagery" Remote Sensing 15, no. 3: 765. https://doi.org/10.3390/rs15030765
APA StyleChen, S., Chen, M., Zhao, B., Mao, T., Wu, J., & Bao, W. (2023). Urban Tree Canopy Mapping Based on Double-Branch Convolutional Neural Network and Multi-Temporal High Spatial Resolution Satellite Imagery. Remote Sensing, 15(3), 765. https://doi.org/10.3390/rs15030765