1. Introduction
With the fast development of the global navigation satellite system (GNSS), GNSS has been widely used in the military, disaster prevention and mitigation, engineering construction, transportation, and urban management, and can provide positioning, navigation, and timing services with different levels of accuracy [
1,
2,
3,
4,
5,
6]. Pseudorange-based/single point positioning (SPP), as one of the most basic modes of GNSS, is used by users in various fields for its computational power, low cost, and fast positioning. The first one that can be used for SPP is the GPS. First of all, only the GPS is capable of SPP, and due to the influence of multiple error sources, the positioning accuracy of GPS SPP has an error of tens of meters [
7]. Therefore, some researchers worked on improving the C/A code measurement accuracy and the signal-in-space ranging error (SISRE) of the broadcast ephemeris and improved the accuracy of both of them to 0.3 m and 0.7 m, respectively [
8]. At present, the positioning accuracy of GPS SPP in horizontal and vertical components is limited to 1–2 m and 2–3 m, respectively [
9]. Galileo had four available satellites in orbit in 2012 and was able to solve SPP independently. In recent years, Galileo satellites have been increasing, and there are now 30 satellites in orbit, with a positioning accuracy of 2–3 m for Galileo SPP in the horizontal component and different frequencies in the vertical component (2–3 m for E1 and 5–7 m for E5a, E5b, and E5 (ab)) [
10]. Currently, BDS-3 has 30 satellites providing navigation, positioning, and timing services, including 24 medium earth orbit (MEO), 3 inclined geosynchronous satellite orbit (IGSO), and 3 geosynchronous earth orbit (GEO) satellites [
11,
12]. BDS SPP, using only the B1 frequency, can provide a positioning accuracy within 10 meters [
13]. The positioning accuracy of single-frequency BDS SPP is better than 2 m and 5 m in horizontal and vertical components, respectively, if group delay and code deviation correction are incorporated into the error correction [
14]. In addition, the estimated TEC noise proxies (for elevations higher than 60 deg.)—a 100 s root mean square (RMS) of TEC—were: 0.05 TECU for the Galileo E5 AltBOC, 0.09 TECU for the GPS L5, 0.1 TECU for the Galileo E5a/E5b BPSK, and 0.85 TECU for the Galileo E1 CBOC. Dual-frequency combinations provide RMS values of 0.03 TECU for the Galileo E1E5 and 0.03/0.07 TECU for the GPS L1L2/L1L5. At low elevations, E5 AltBOC provides at least twice as little single-frequency TEC noise as compared with the data obtained from E5a or E5b [
15].
Since the data accuracy of broadcast ephemeris itself is poor, far below the accuracy of precision ephemeris and precision clock error products, and SPP is based on the data provided by broadcast ephemeris to calculate the satellite 3D position and satellite clock error, the positioning accuracy of SPP is limited to the level of meters [
16]. To improve the positioning accuracy of SPP, some GNSS researchers have contributed to the research on improving mathematical models, error model correction, and accuracy improvement for GNSS broadcast ephemeris products. Firstly, regarding the mathematical model, a weighted least squares method based on least squares, with the satellite altitude cut-off angle as the weight, has remarkably improved the positioning accuracy. In addition, iterative least squares with the user-equivalent range error (UERE) as the weight, enhances the positioning accuracy of single-frequency SPP of four single systems, GPS, GLONASS, BDS, and Galileo, to 1/3/1.5/1.5 m, 1.5/3/1.5/1.5 m, and 2.5/6/ 2.5/3 m in E, N, and U components [
17,
18]. In terms of the error correction model, the effect of ionospheric delay is an essential error source for single-frequency SPP. Meanwhile, single-frequency receivers can only weaken the impact of ionospheric delay by various models. The commonly used ionospheric correction model is Klobuchar, which is widely used because of its simple algorithm [
19]. Some researchers have improved the basic Klobuchar model and have developed the GPS Klobuchar model (GPSK8) and the BDS Klobuchar model (BDSK8), which are able to eliminate 64.8% and 65.4% of the ionospheric delay, respectively [
20]. Except for the K8 model, some scholars have studied the BDS Global Broadcast Ionospheric Delay Correction Model (BDGIM), under which the global 3D positioning accuracy of BDS SPP can reach 3.5 m, which is better than the BDSK8 model in the mid-latitude region of the Northern hemisphere [
21,
22]. In addition, the accuracy of the predicted GIMs generated by three different IAACs (CODE, UPC, and ESA) has been evaluated. It was found that the accuracy of the predicted GIMs from CODE was better than that of the predicted GIMs from UPC and ESA, providing a reference for single-frequency GNSS [
23].
Although the positioning accuracy of SPP has improved in the case of various mathematical models and error model corrections, the available satellites for a single system have been drastically reduced in areas with complex environments and severe occlusions, where the positioning accuracy is poor or even impossible. In order to obtain the positioning performance of SPP under different environments, the positioning performance of single GPS SPP under 10°, 20°, 30° and 40° satellite cut-off angles is solved by simulating different environments with different satellite cut-off angles. The results show that when the satellite altitude angle reaches more than 30 degrees, the number of GPS satellites decreases from 7 to 4, the PDOP value increases from about 3 to more than 6, and the 3D accuracy decreases from about 2 m to more than 4 m [
24]. Therefore, some scholars have conducted multi-system combination SPP. The first multi-system combination was the GPS and GLONASS combination, which increased the number of available satellites and provided more stable positioning results in complex areas [
25]. With the development of Galileo and BDS, the study of the combination of GPS and Galileo or BDS has also received attention [
26]. When the GPS and four Galileo In-Orbit Validation (IOV) satellites are used for simultaneous positioning, the results are improved by 2% and 10% in the horizontal and vertical components, respectively [
27]. The combination of GPS and BDS was first studied in the Australian region, where the combination of BDS and GPS can produce better positioning accuracy and position stability in areas with few available GPS satellites [
28]. In the Asia-Pacific region, the combination of GPS and BDS-2 has dramatically improved the positioning accuracy by about 10% better than the case of GPS-only. The combination of multiple systems SPP not only improves the accuracy of navigation and positioning but also improves the integrity of positioning [
29]. However, since different navigation and positioning systems have different time and coordinate bases, and the hardware delays between systems are receiver-dependent, all these factors may lead to systematic bias when making observations. Therefore, the time, coordinate base, and receiver hardware delay must be considered when performing multi-system fusion positioning [
30]. This is the inter-system bias (ISB), and this error must be dealt with when performing multi-system SPP [
31]. Calculating the ISB of the GPS and Galileo is easier because the GPS and Galileo have the same frequency (e.g., L1/L5 for the GPS and E1/E5a for Galileo). The ISB of the GPS and Galileo is discussed, and it is found that the value of ISB depends on the receiver type and can be up to hundreds of seconds, according to the data provided by The Cooperative Network for GIOVE Observation (CONGO) [
32]. The effect of ISB must also be considered when performing the combined GPS and BDS SPP. The intra-day stability of the ISB of the GPS and BDS was evaluated using a hypothesis testing method. The result proves that ISB is stable in a short time and can be used as an a priori value [
33].
In the last two decades, numerous scholars have studied the status accuracy of single-system SPP, but there are fewer studies on the positioning excellence of different systems within different regions. Meanwhile, some scholars have studied multi-system SPP, but there are fewer studies on the combination of BDS-3 and Galileo, while there are fewer studies on the addition of other systems to the current system in different regions. Based on the above, this paper first analyzes the status of three satellite systems, GPS, BDS-3, and Galileo, regarding the number of available satellites and PDOP. The following three single systems, GPS, BDS-3, and Galileo, are solved for single-frequency SPP at an elevation cut-off of 7°, respectively, to analyze the global distribution of the positioning accuracy in horizontal and vertical components and to compare the accuracy of the three systems. Additionally, we analyzed the dual-frequency single-system SPP. The gain of the combination of GPS with BDS-3 or Galileo, BDS-3 with GPS or Galileo, and Galileo with GPS or BDS-3 in relation to the single system was then examined. Meanwhile, using several ionospheric products, we evaluated the SPP’s accuracy. Finally, the stability and variability of ISB are explored.
5. Conclusions
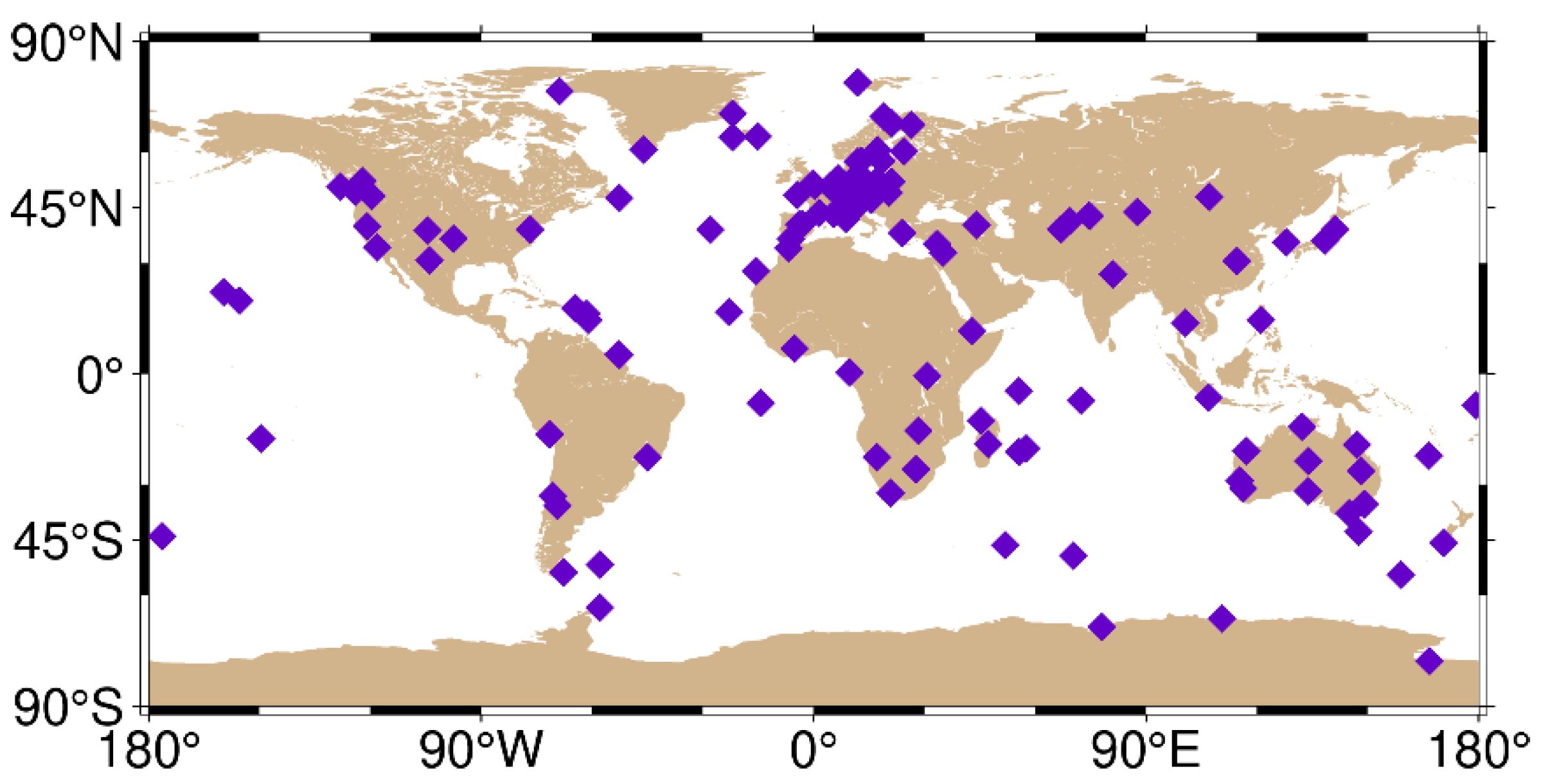
GNSS was an emerging field in the 20th century, among which SPP has the features of low cost, a fast solution speed, and small hardware size, which can be installed on small devices, such as cell phones and receivers, and has been widely used in car navigation, cell phone terminal positioning, earthquake mitigation and detection, agriculture and forestry, and other fields. In this paper, 145 tracking stations were selected to analyze the positioning theory of SPP and its positioning performance, and the following conclusions were obtained:
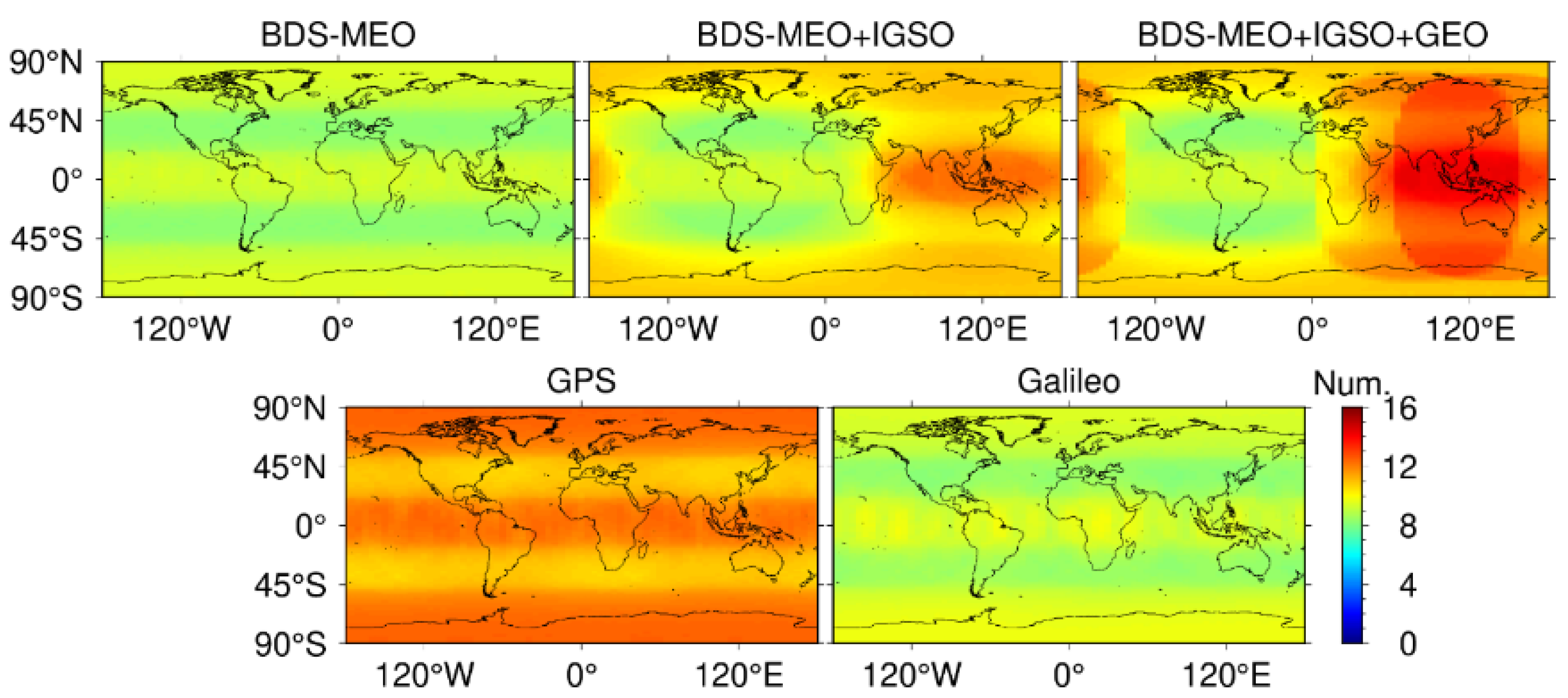
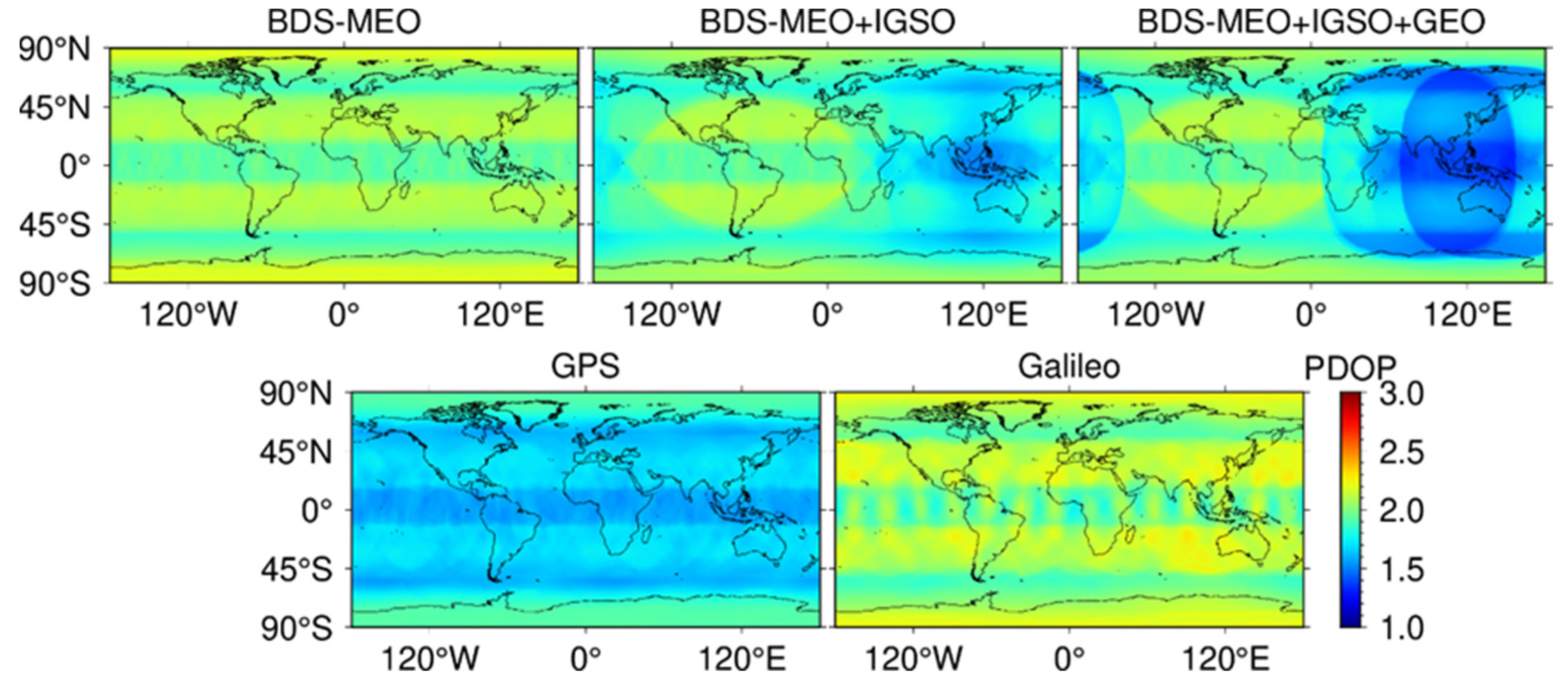
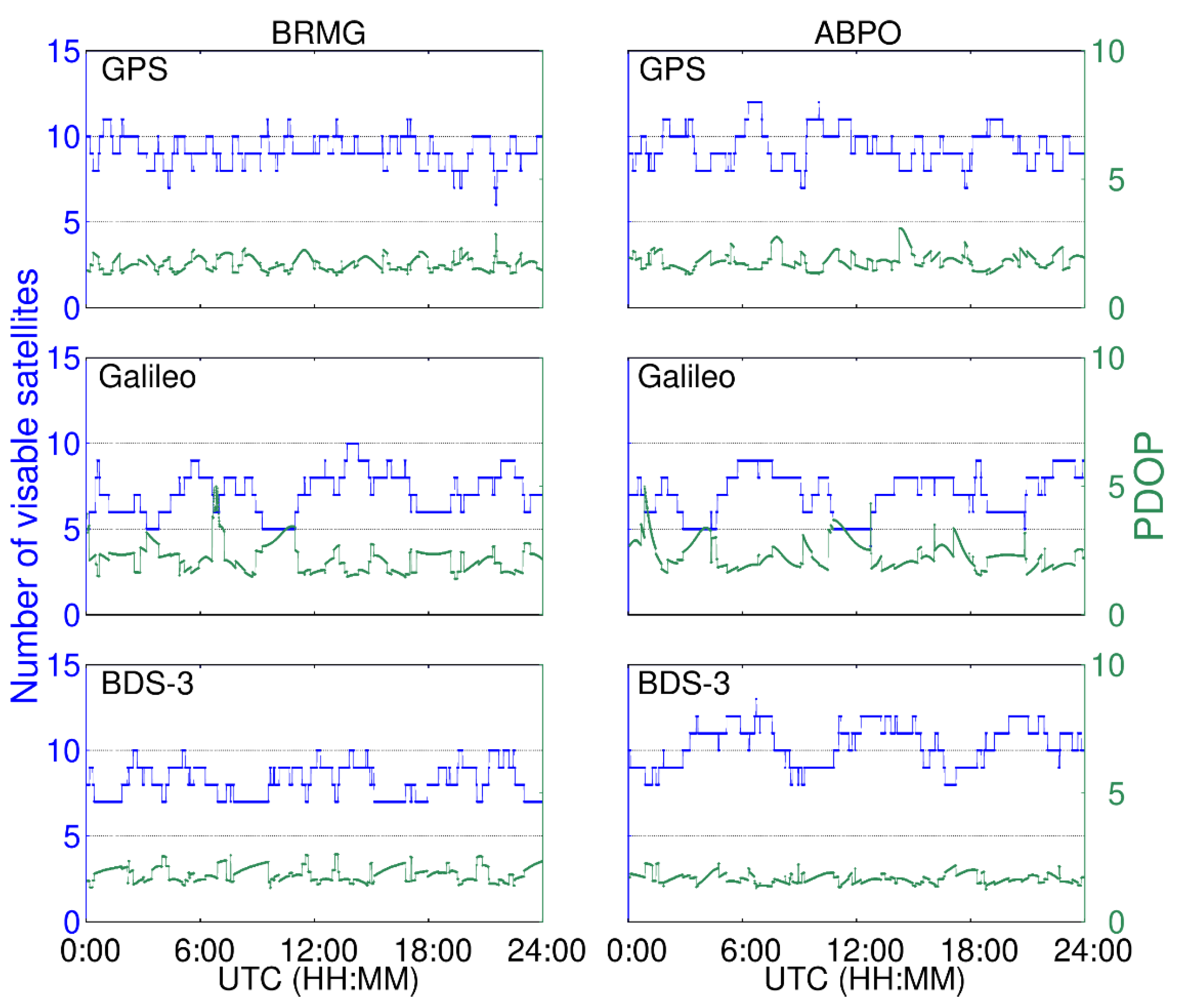
(1) First, we analyzed the satellite availability and PDOP values of the GPS, Galileo, BDS-3-MEO, BDS-3-MEO+IGSO, and BDS-3-MEO+IGSO+GEO. The results indicate that the global satellite availabilities of the GPS, Galileo, and BDS-3-MEO have similar global distributions, all of which first decrease and then increase from the equator to the poles. In the mid and low latitudes, the number of available satellites is 11/8/9, respectively. In other regions, the number of available satellites increases to 13, 10, and 10, respectively. However, when the IGSO and GEO satellites are added, the number of available satellites increases to 12 for BDS-3 and reaches 13 near the equator in the Eastern hemisphere. The number of available satellites in the Eastern hemisphere is strongly enhanced.
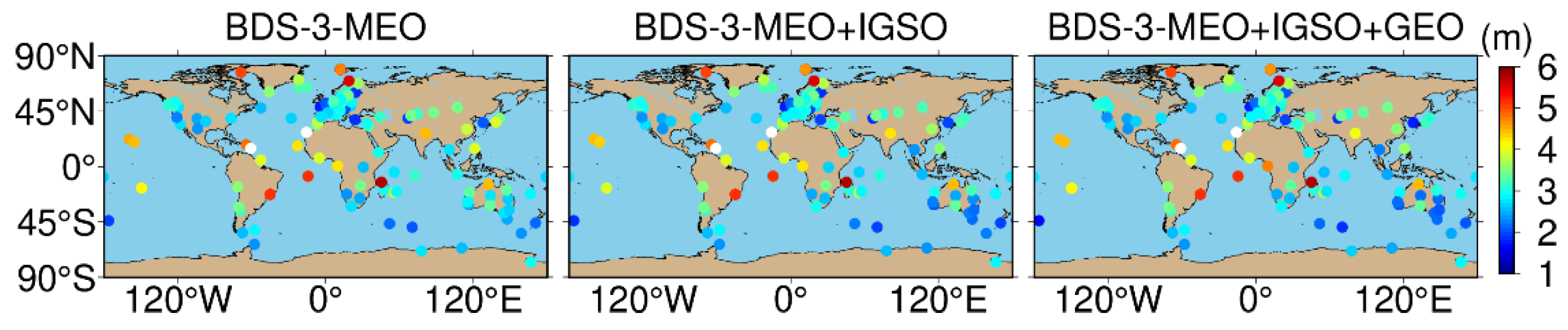
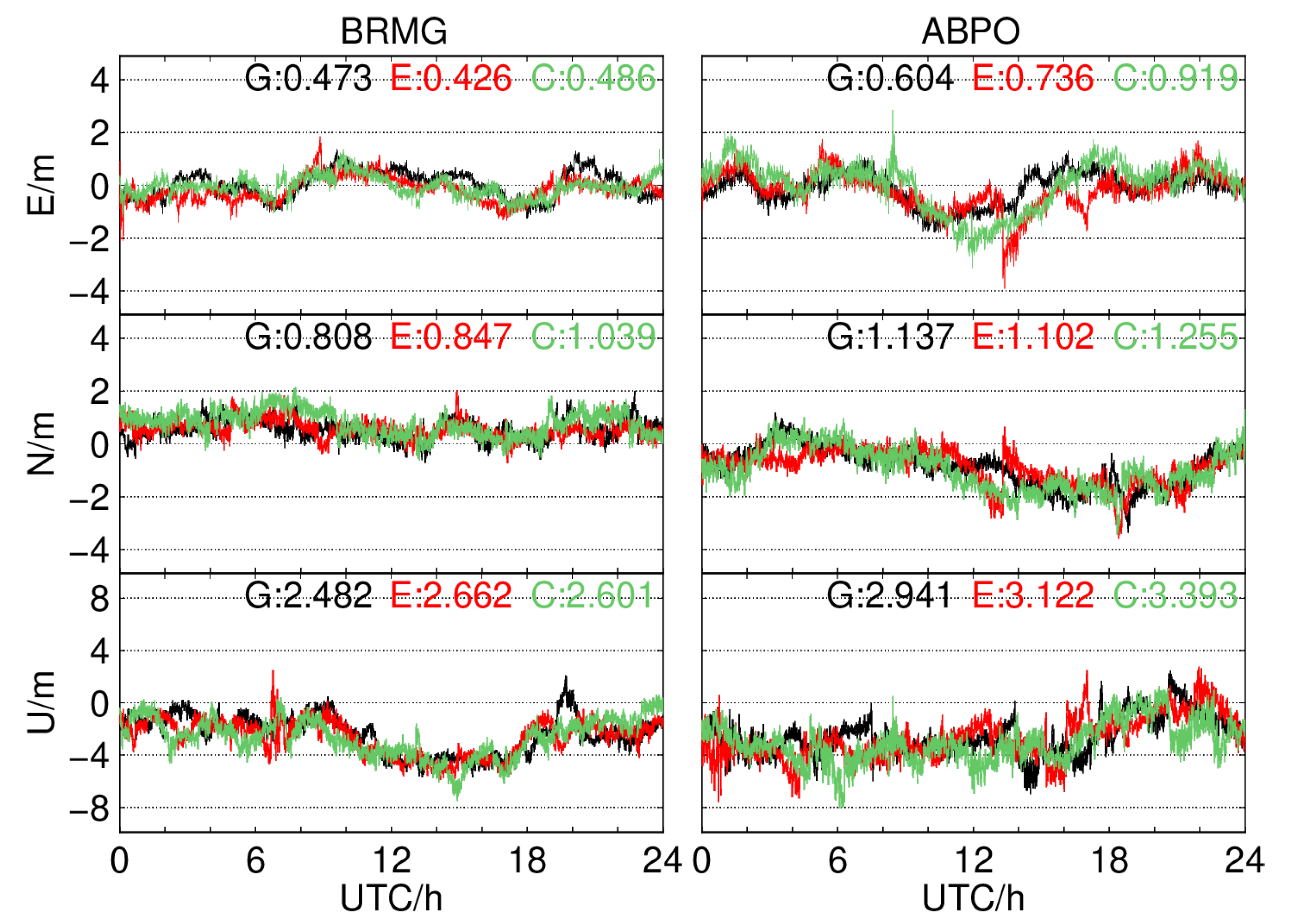
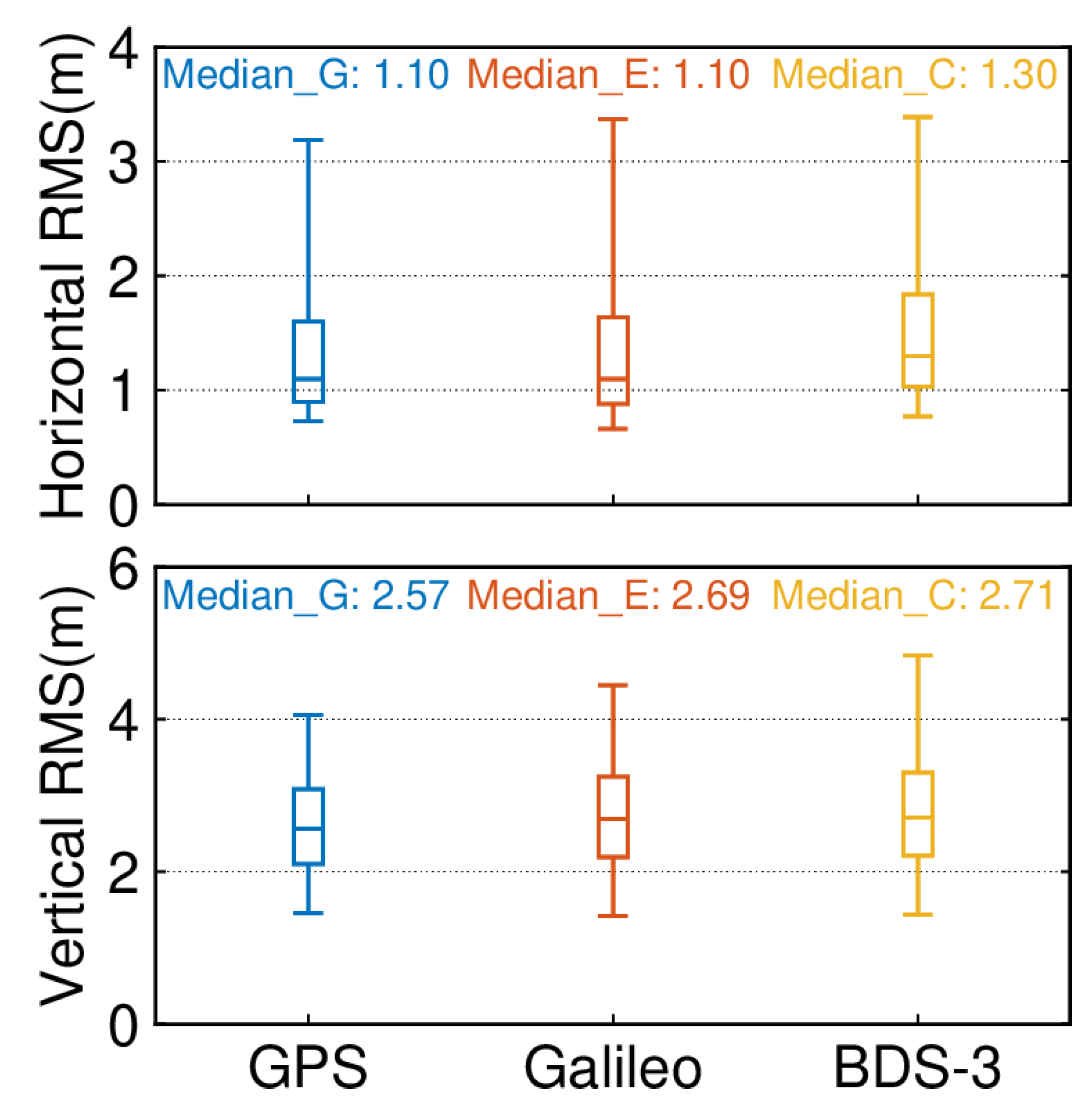
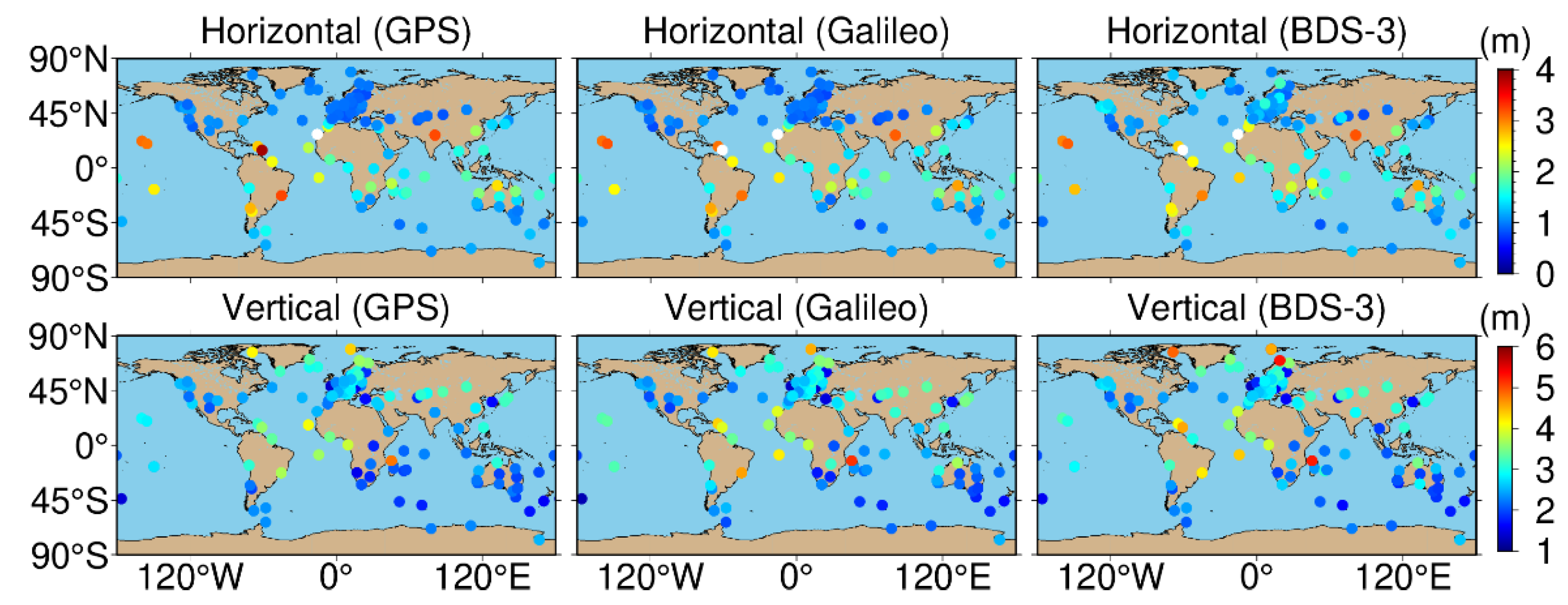
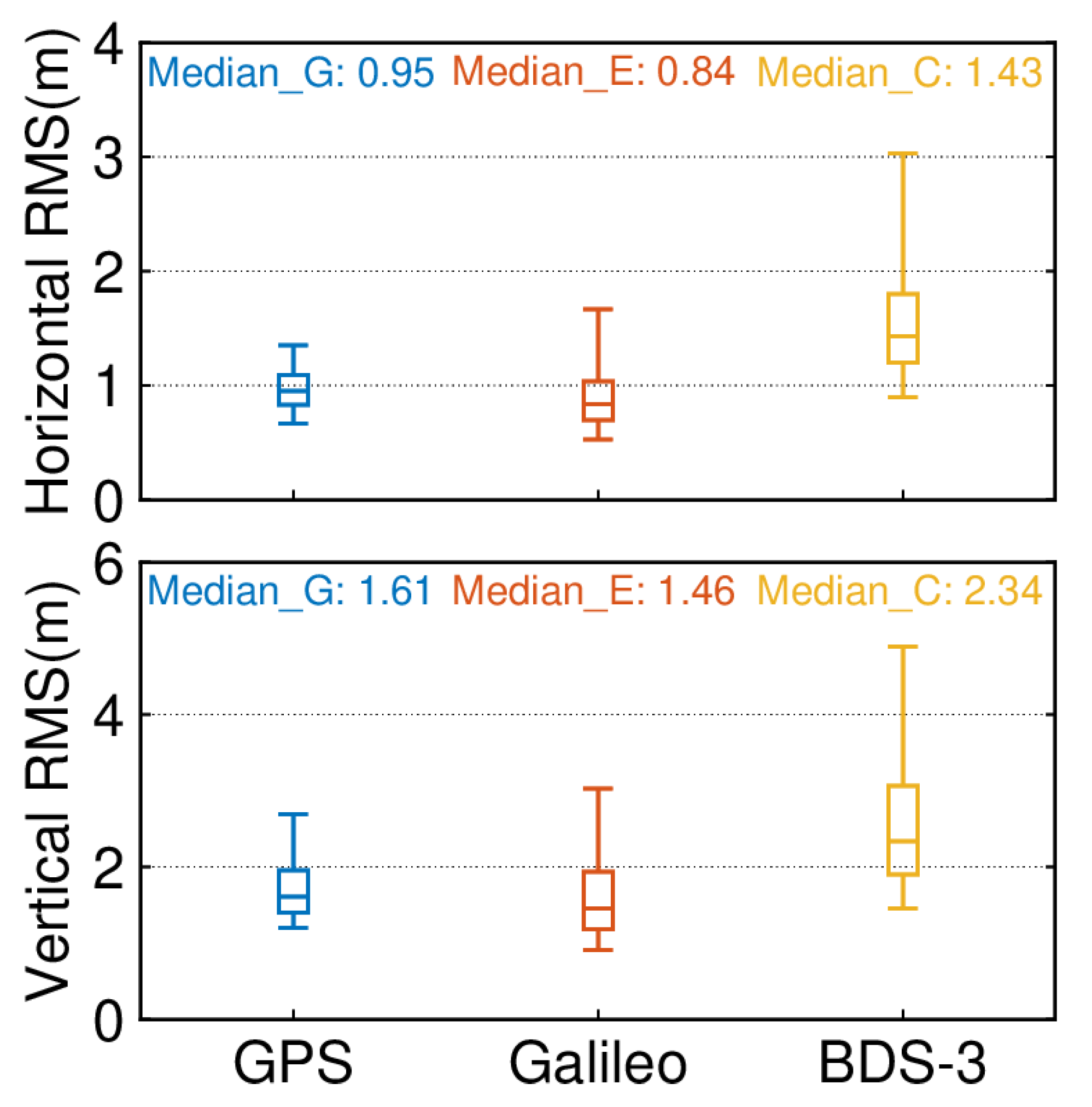
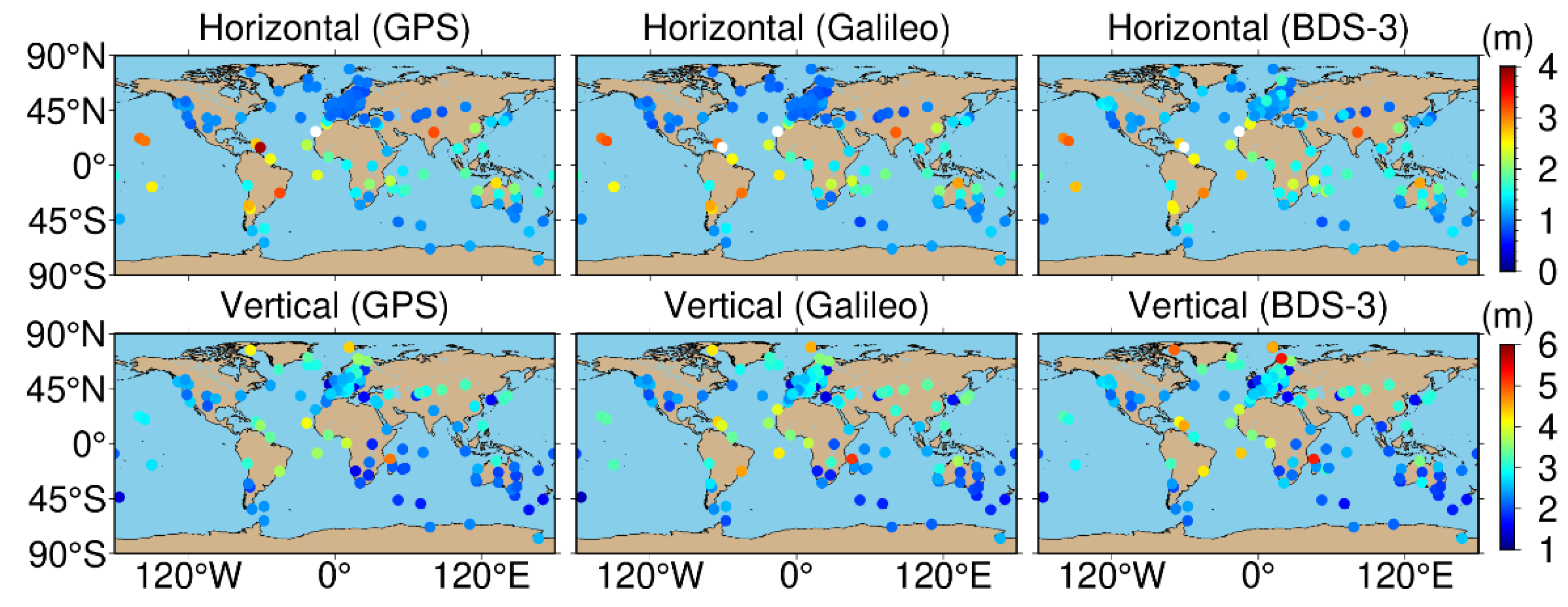
(2) The accuracy of the global distribution of the GPS, BDS-3, and Galileo single-frequency SPP is analyzed, while the accuracy distribution characteristics of the three systems are compared globally. The results show that in the horizontal component, the GPS and Galileo have the best positioning accuracy of 1–1.2 m in Europe and North America and 2–3 m at low latitudes, while BDS-3 has the highest positioning accuracy of about 1.2 m in the Asia-Pacific region, and the overall Eastern hemisphere is better than the Western hemisphere. In the vertical component, the accuracy of all three systems gradually deteriorates from south to north, probably due to system bias and perhaps due to the influence of the ionosphere. After the comparison of the three systems, the positioning accuracy of the GPS and Galileo is comparable, and BDS-3 outperforms the GPS and Galileo by 30% and 20% in the Asia-Pacific region on the horizontal and vertical components, respectively.
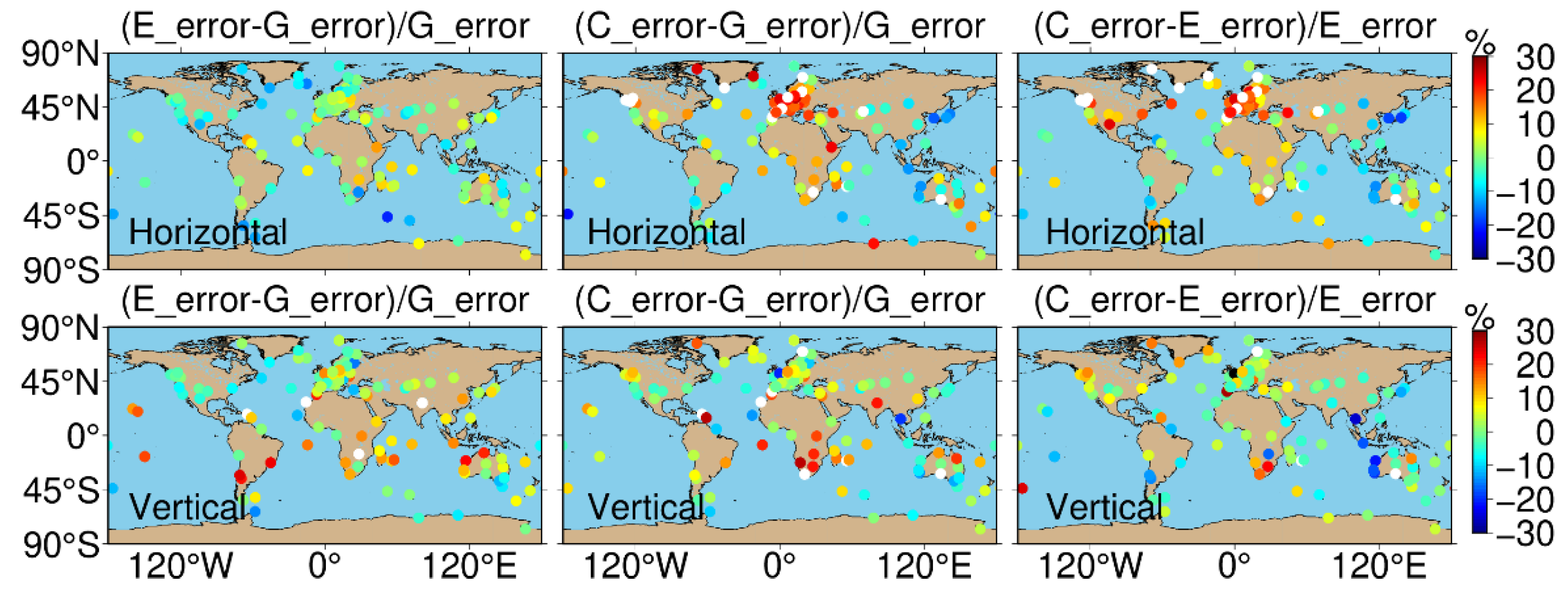
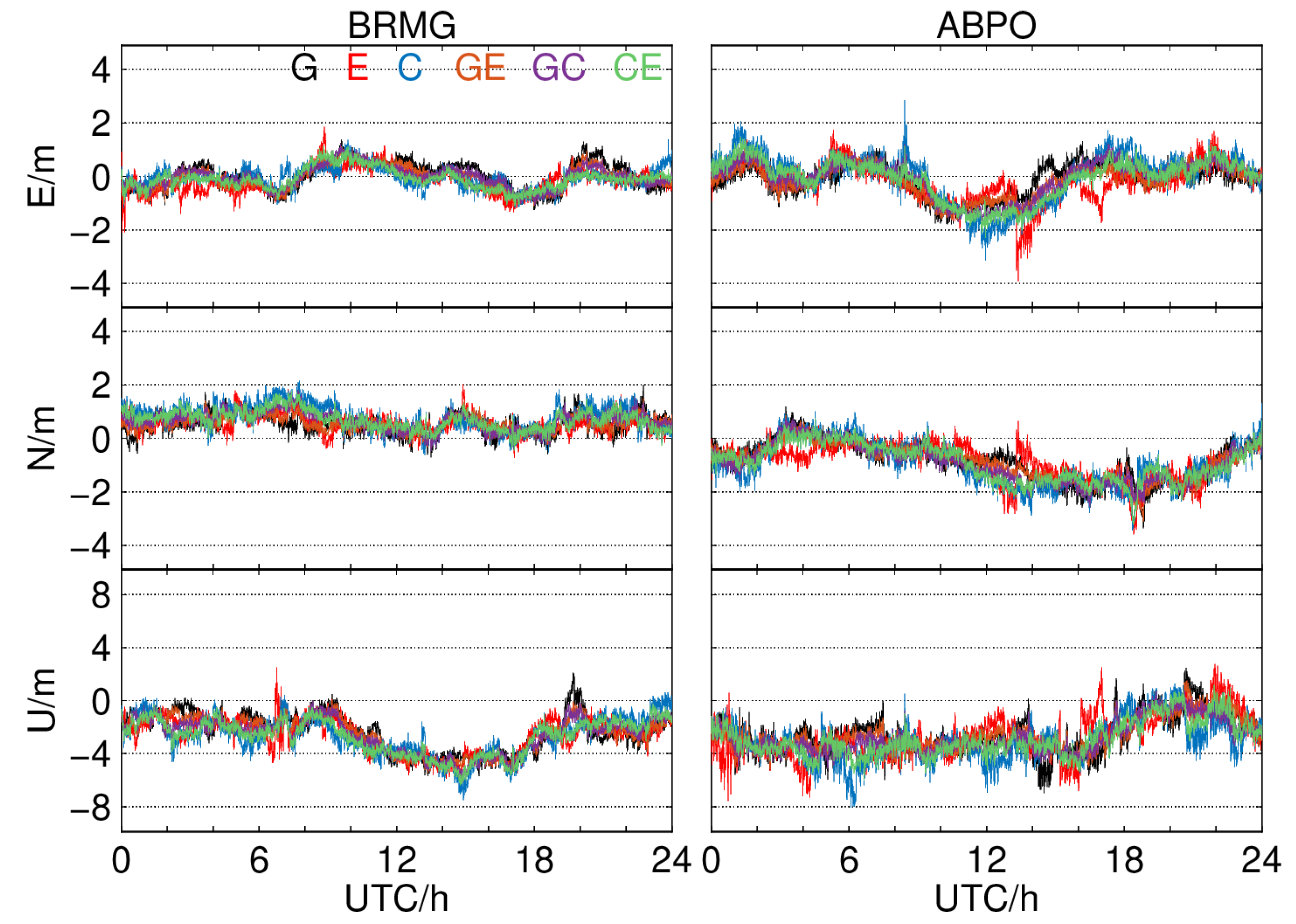
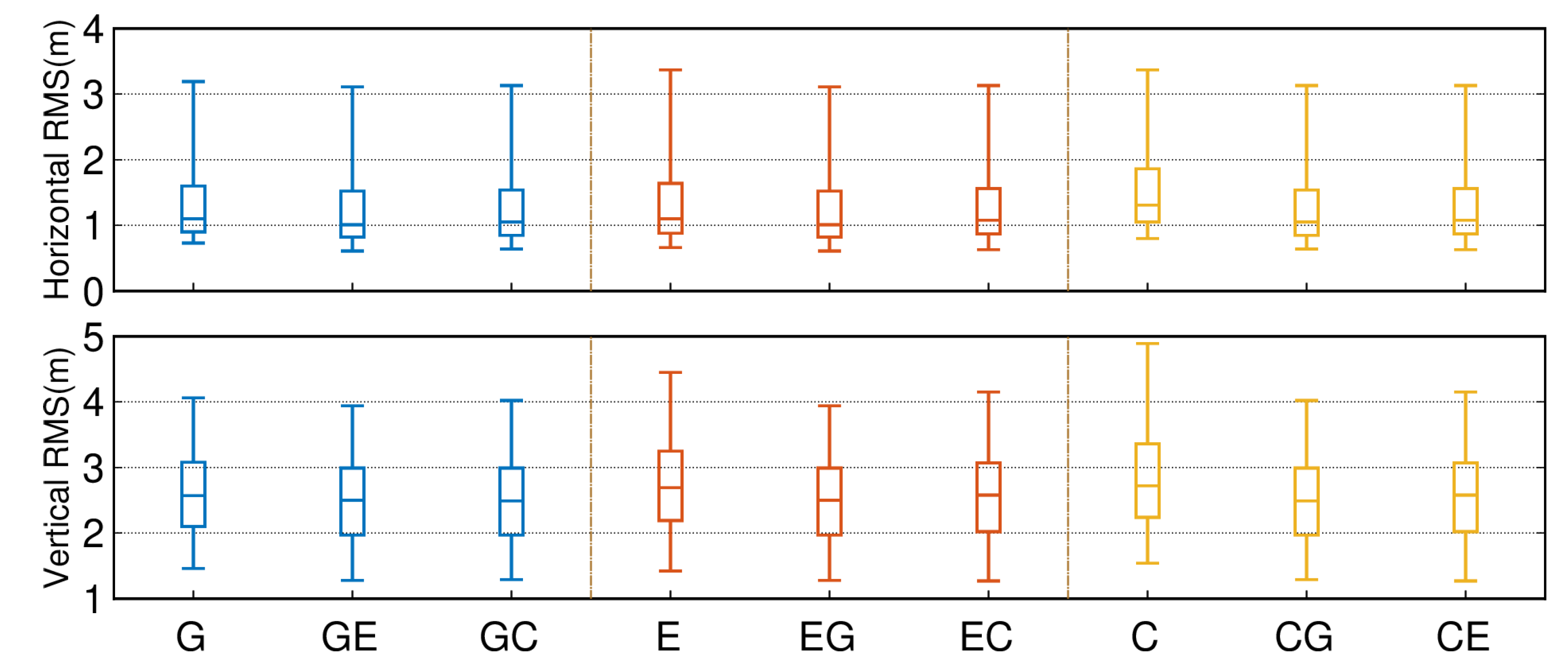
(3) We combined BDS-3 or Galileo with GPS, GPS or Galileo with BDS-3, and GPS or BDS-3 with Galileo and analyzed the percentage gain of the combined SPP with respect to the single system. The conclusions drawn are as follows: For the combination of the GPS and Galileo with BDS-3, the accuracy of the Asia-Pacific region in the horizontal and vertical components will be improved by 30% and 20%, respectively. When the GPS and Galileo are combined with BDS-3, the accuracy in North America and Europe will improve by 30–40% in the horizontal component, and the global accuracy will improve by 10–20% in the vertical component. The combination of Galileo and the GPS or BDS-3 can effectively improve the accuracy of the vertical component in the middle and low latitudes by about 15–20%.
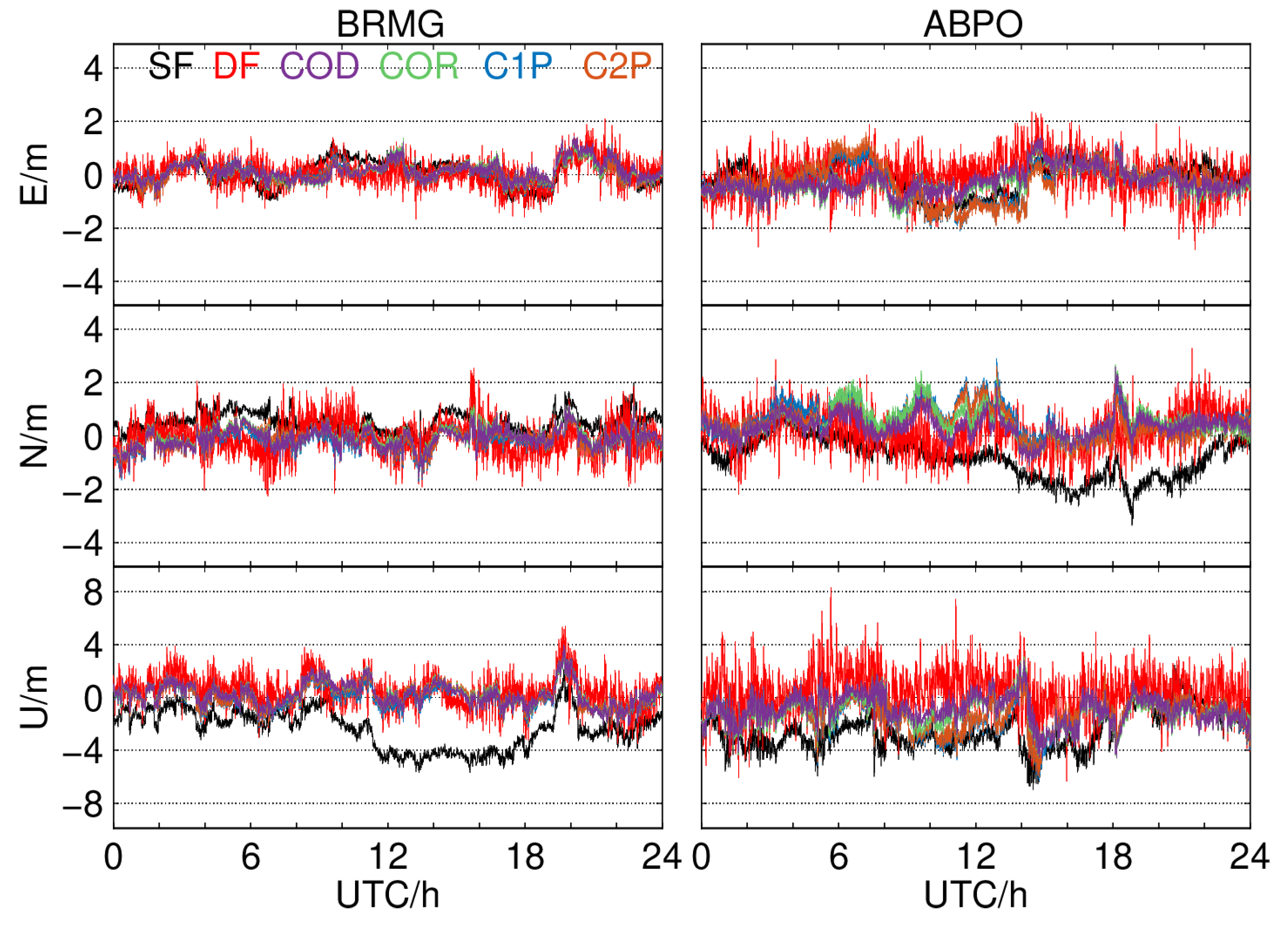
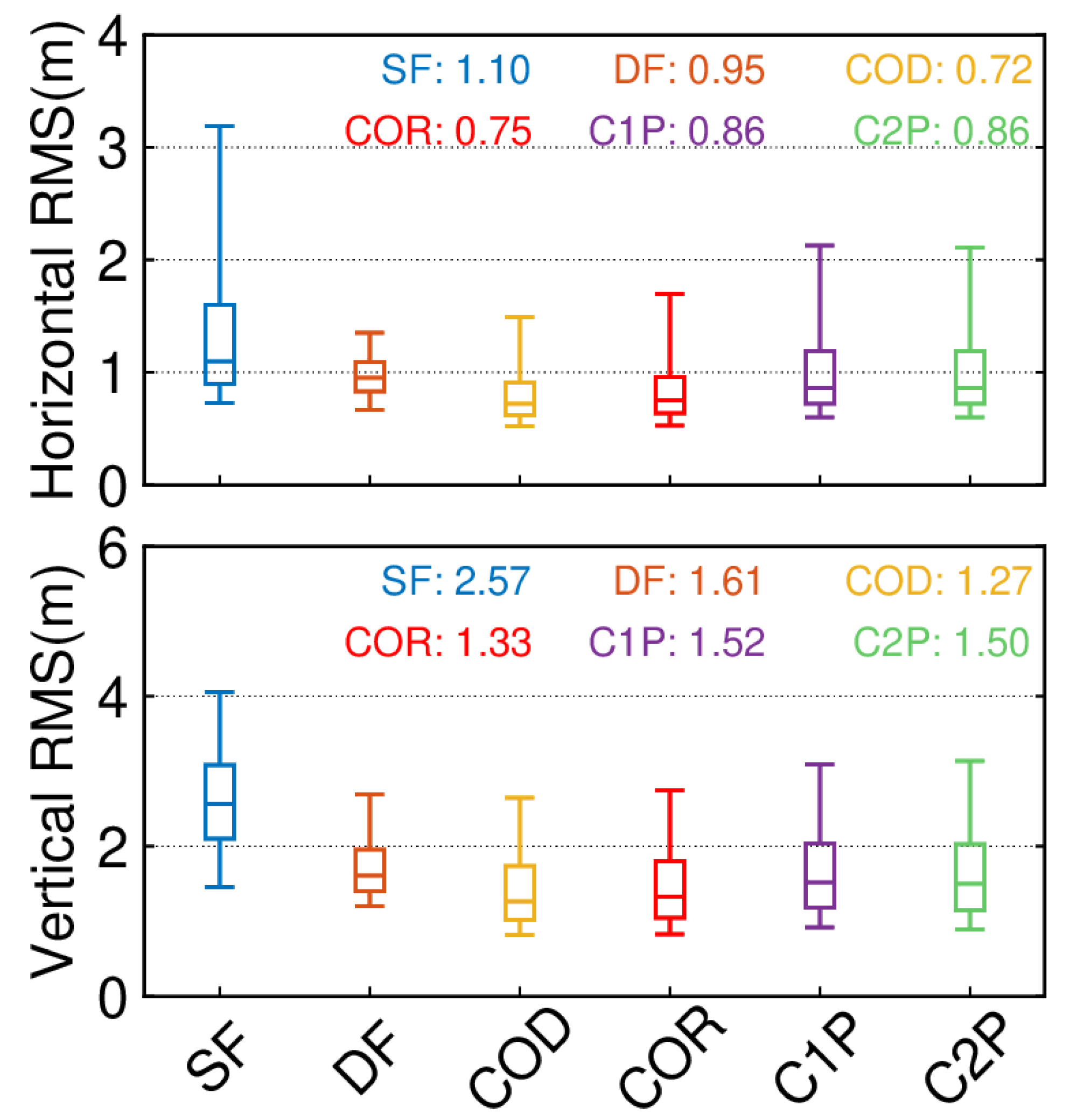
(4) We analyzed the positioning accuracy using different ionospheric products, and the results showed that the median RMS of COD, COR, C1P, and C2P were 0.72/0.75/0.86/0.86 m and 1.27/1.33/1.52/1.50 m, respectively, with the highest accuracy using COD, followed by COR, and C1P and C2P being comparable and slightly lower than COR, thus providing a reference to facilitate the selection of products for single-frequency GNSS users.
(5) We analyzed the positioning accuracy using different ionospheric products, and the results showed that the single-frequency positioning accuracy was the worst, with the highest accuracy using COD, followed by COR, and C1P and C2P being equivalent and slightly lower than COR.
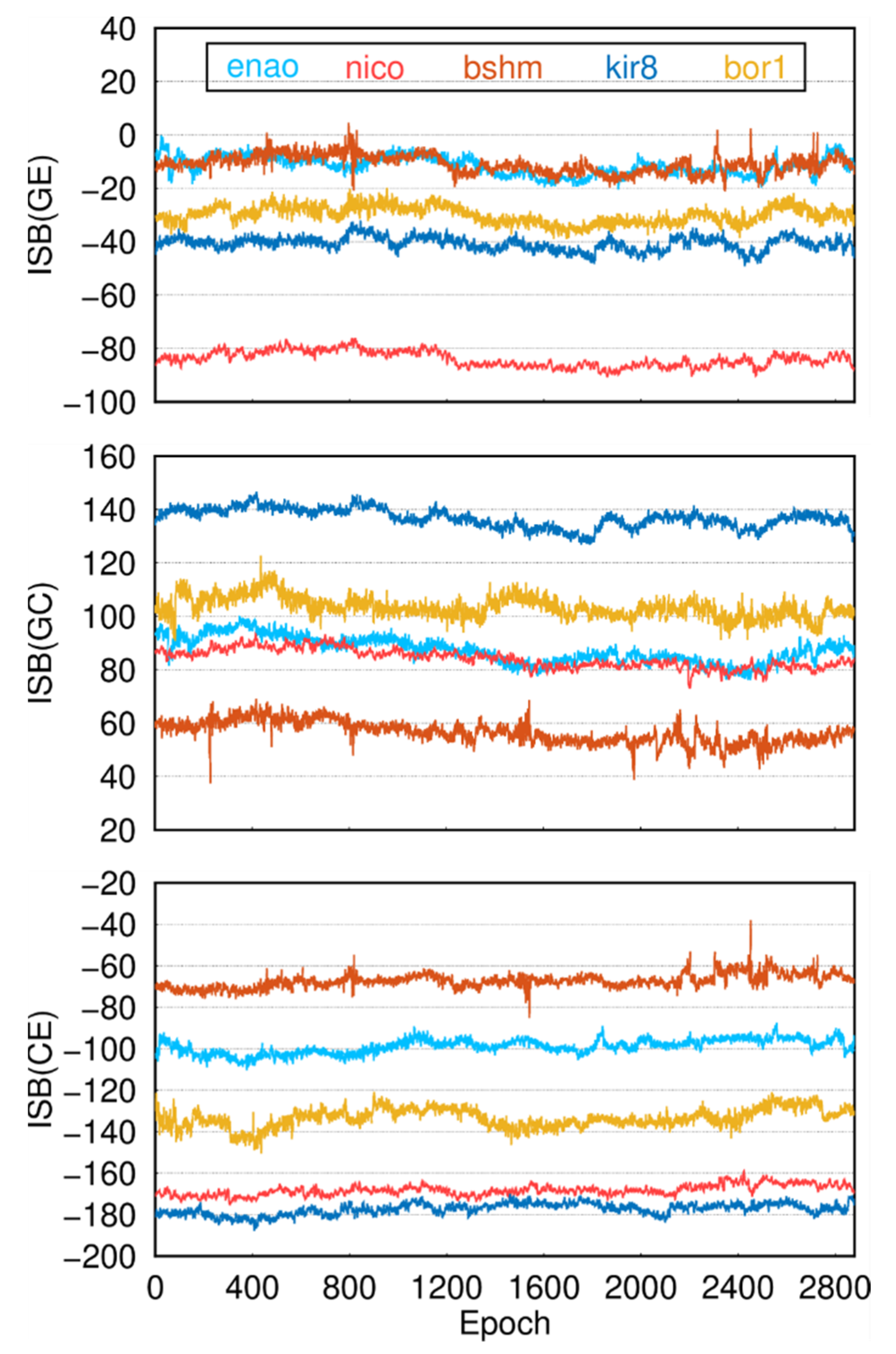
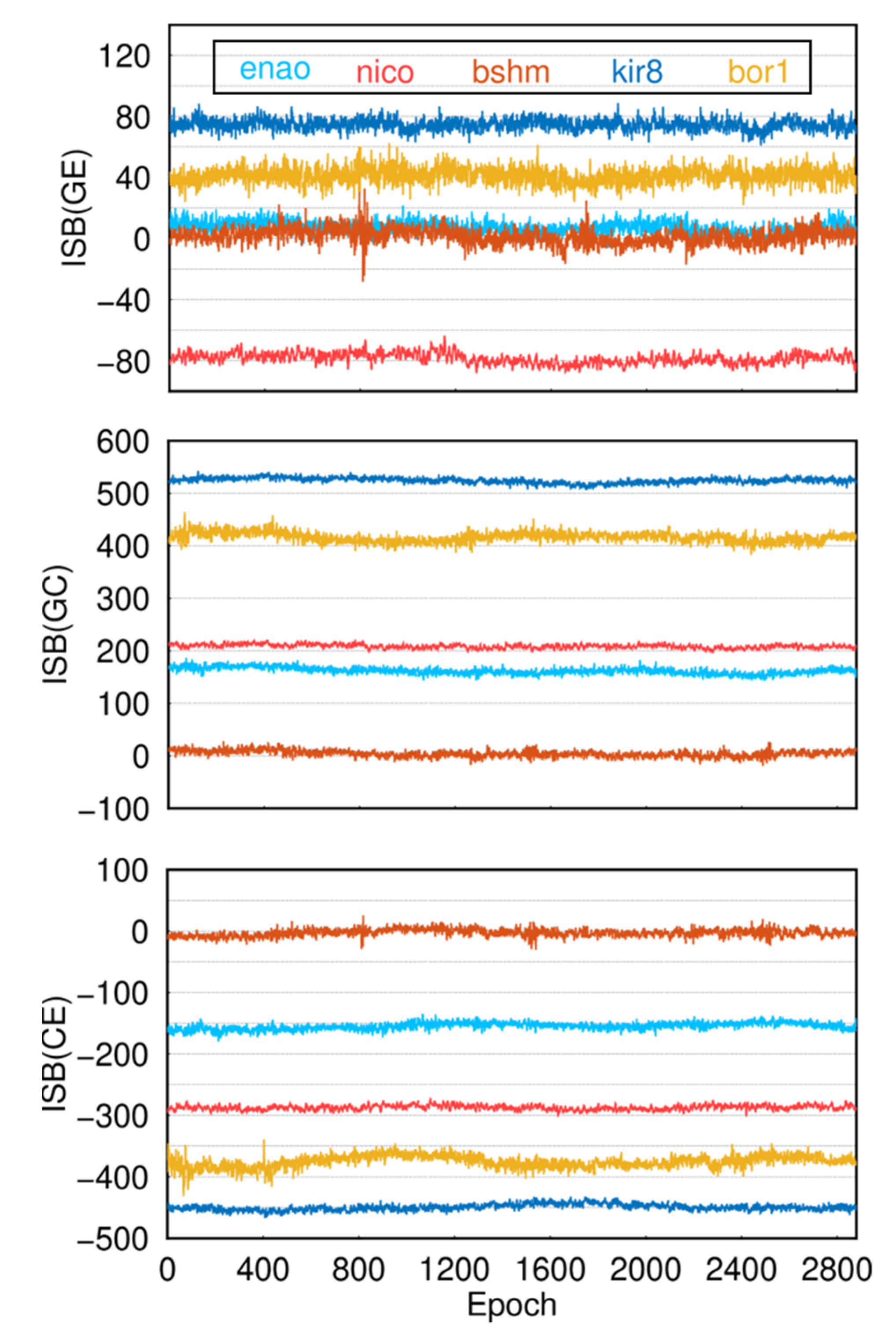
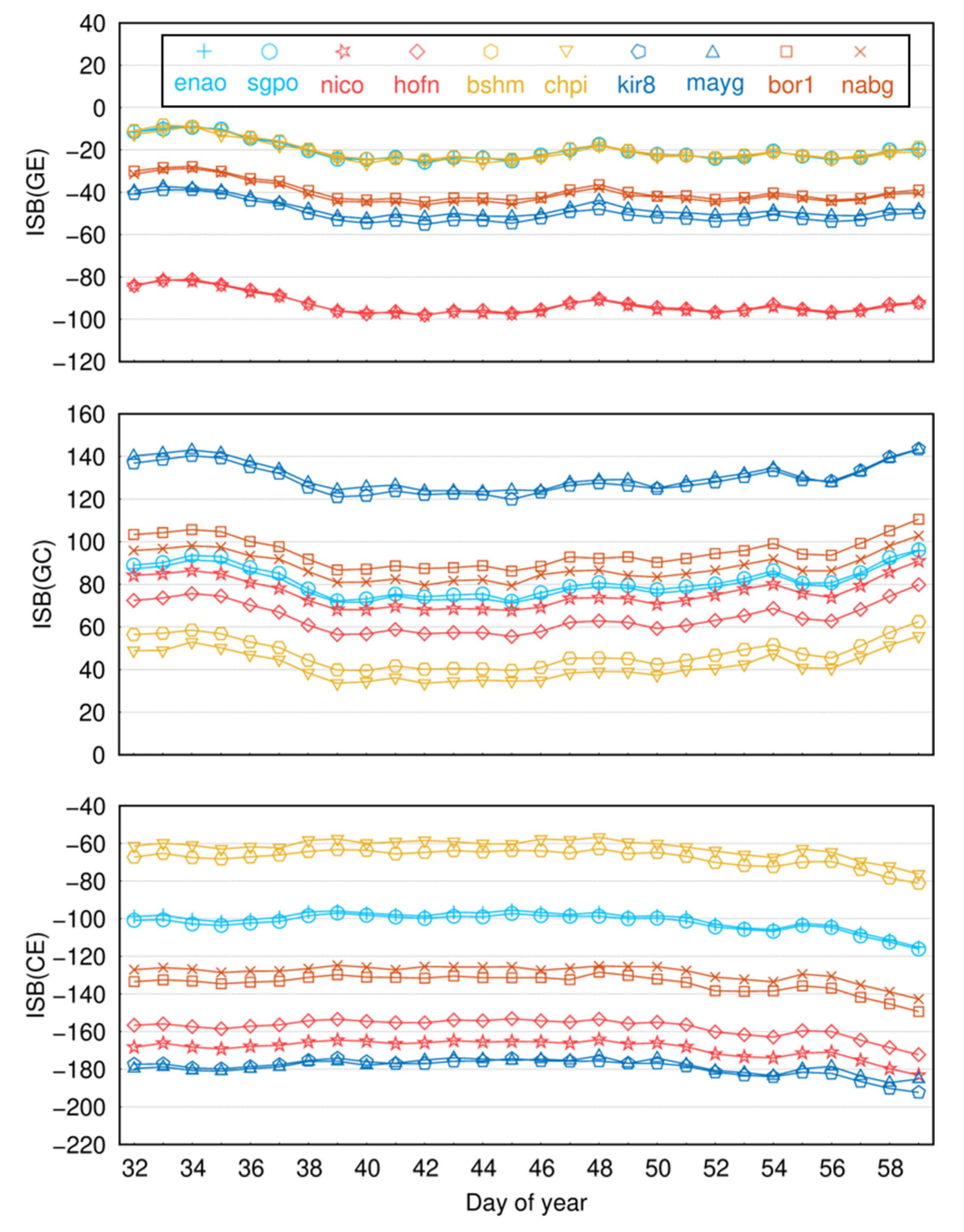
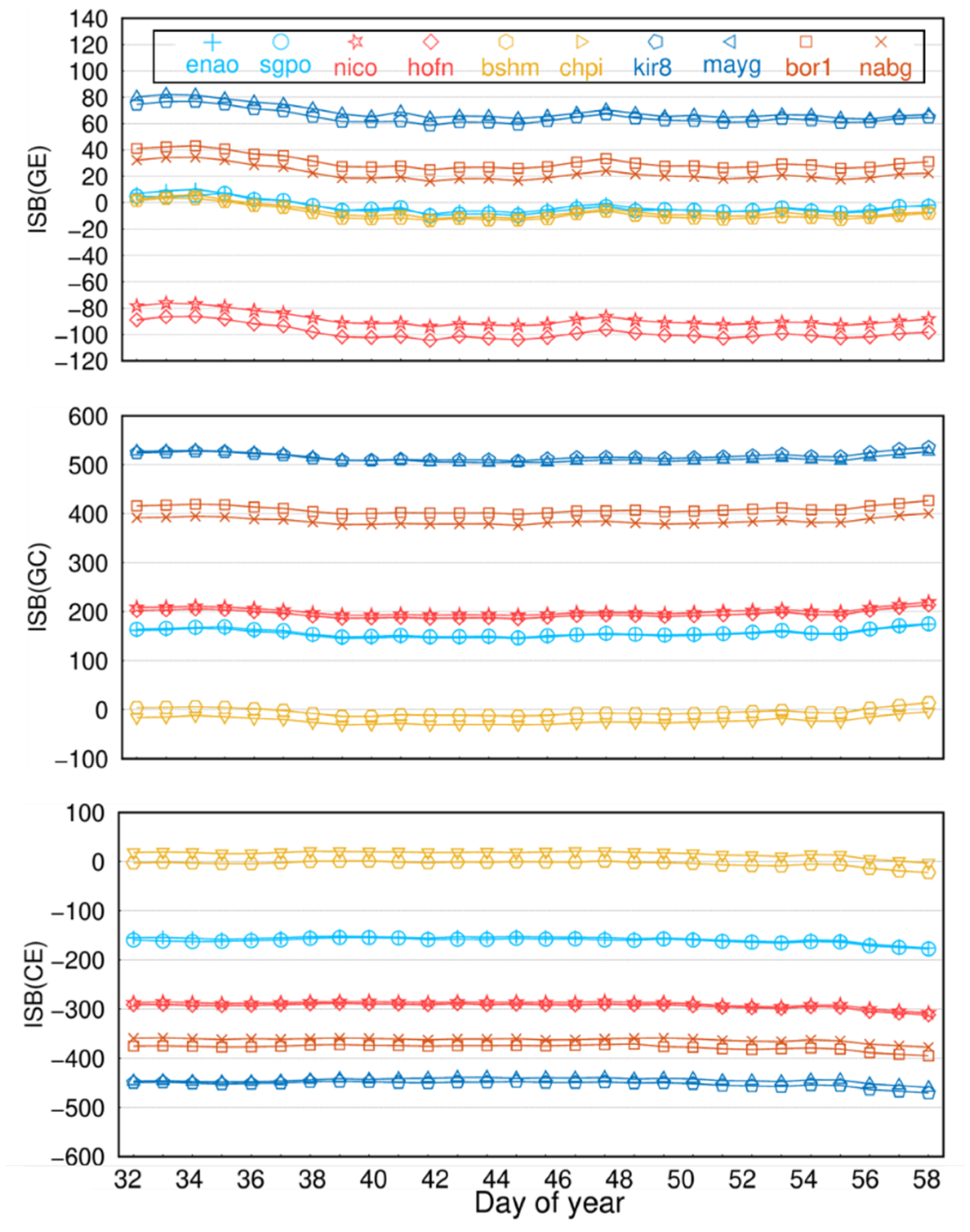
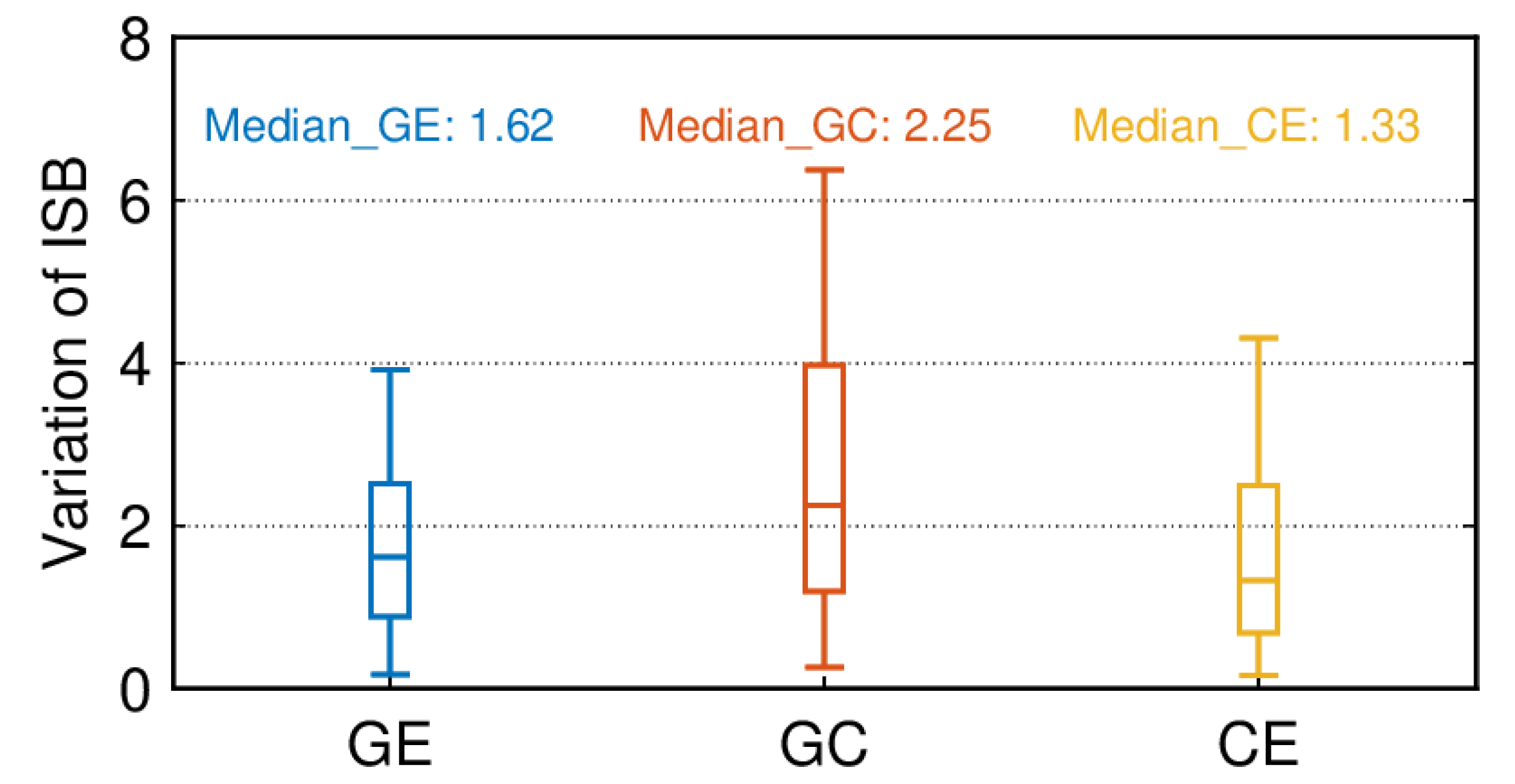
(6) Finally, we analyzed the single-frequency and dual-frequency ISBs of five receiver types, and the results showed that the ISBs are stable in a short time. At the same time, the ISB is related to the receiver type, and the difference between the single-frequency ISB of the same receiver type is smaller than that of the dual-frequency ISB; thus, it is recommended to use the single-frequency receiver.
The results of this paper clearly illustrate the positioning accuracy of three single-system SPP solutions—GPS, BDS-3, and Galileo—in different regions. As well as being able to analyze the positioning superiority of different system combinations in different regions, this provides a reference for choosing the optimal combination for different regions, while the ISB analysis provides more possibilities for the multi-system combination SPP.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}