




Simultaneous Localization and Mapping (SLAM) for Autonomous Driving: Concept and Analysis


Abstract
1. Introduction
2. Key SLAM Techniques
2.1. Online and Offline SLAM
2.2. Filter-Based SLAM
2.3. Optimization-Based SLAM
2.4. Sensors and Fusion Method for SLAM
2.5. Deep Learning-Based SLAM
3. Application of SLAM in Autonomous Driving
3.1. High Definition Map Generation and Updating
3.2. Small Local Map Generation
3.3. Localization within the Existing Map
4. Challenges of Applying SLAM for Autonomous Driving and Suggested Solutions
4.1. Ensuring High Accuracy and High Efficiency
4.2. Representing the Environment
4.3. Issue of Estimation Drifts
4.4. Lack of Quality Control
5. Lidar/GNSS/INS Based Mapping and Localization: A Case Study
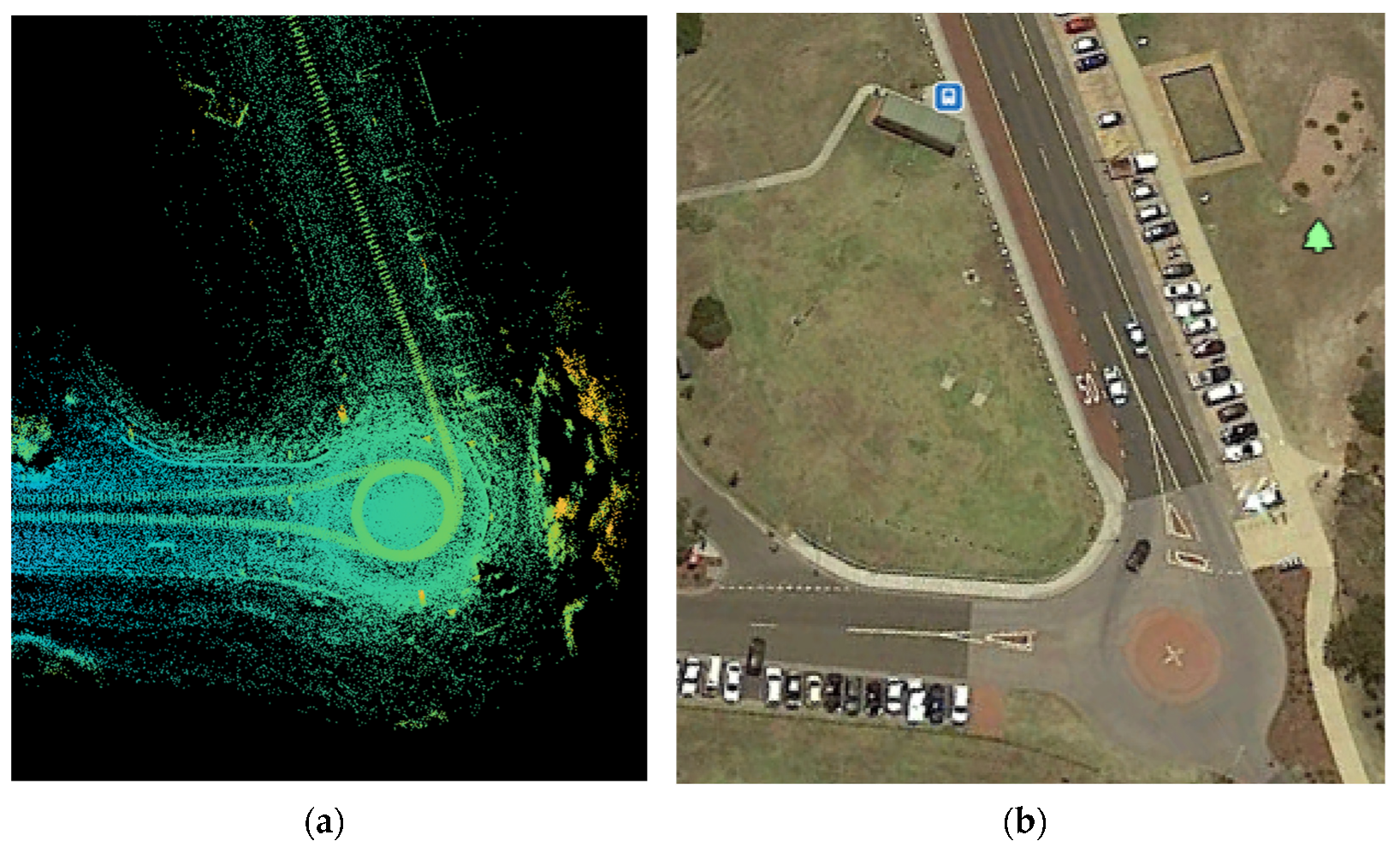
5.1. Experiment Setup
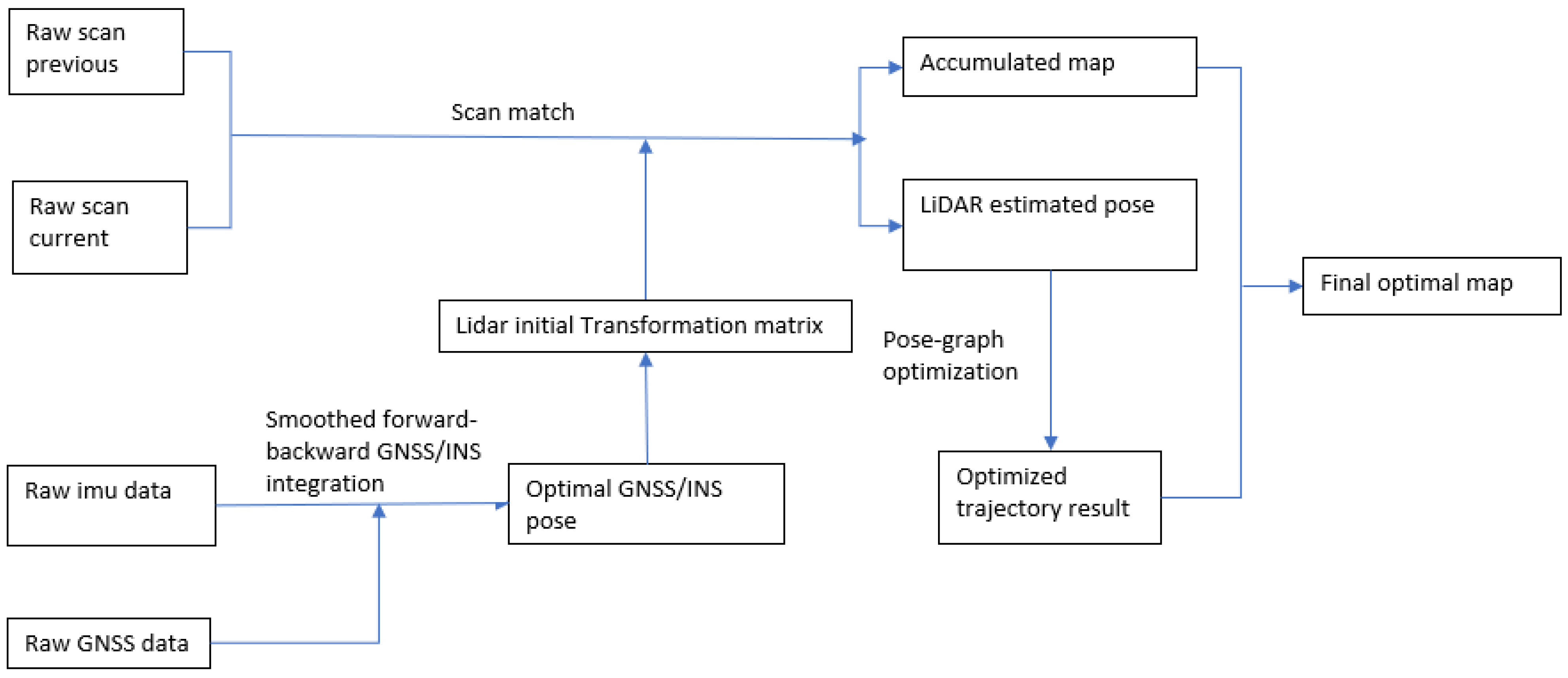
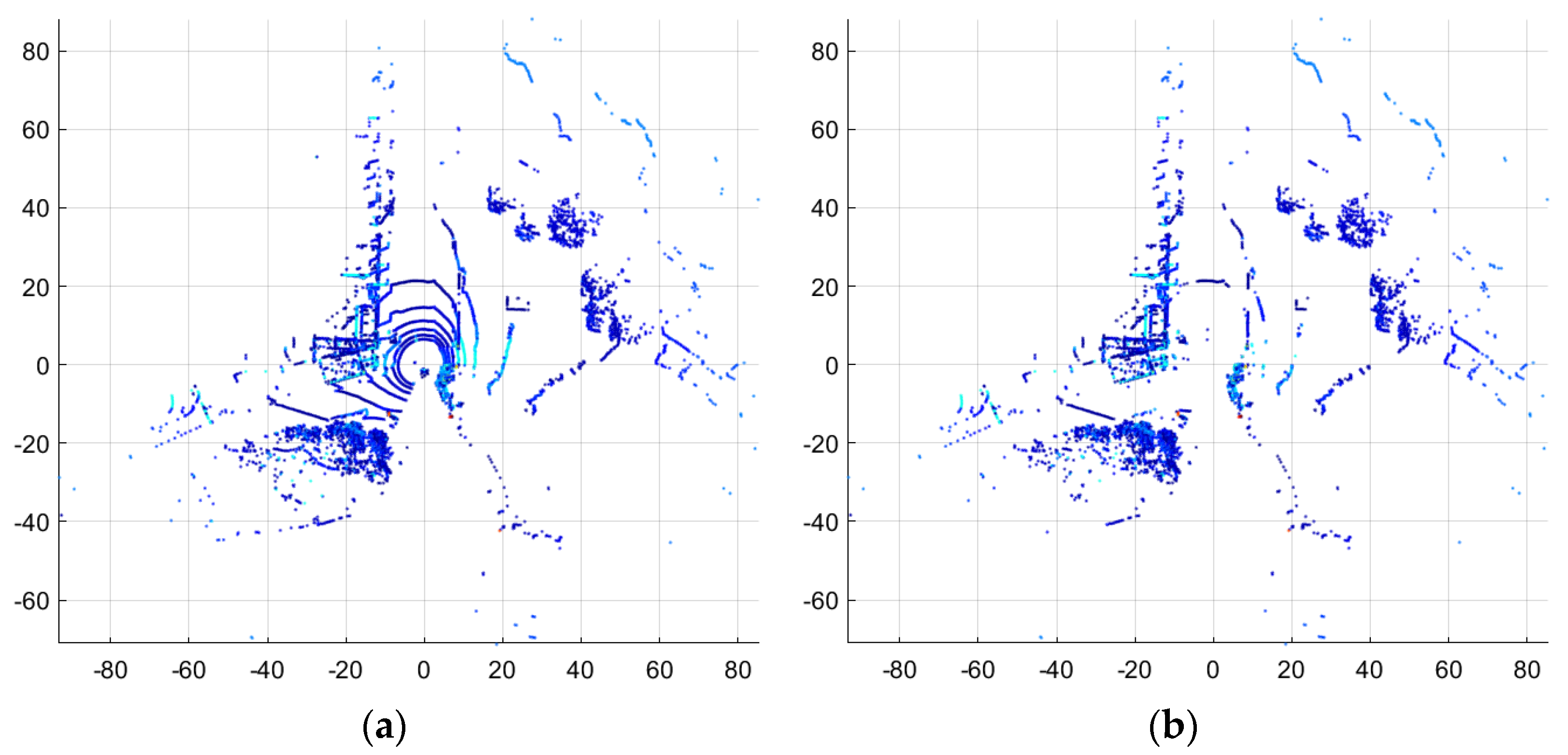
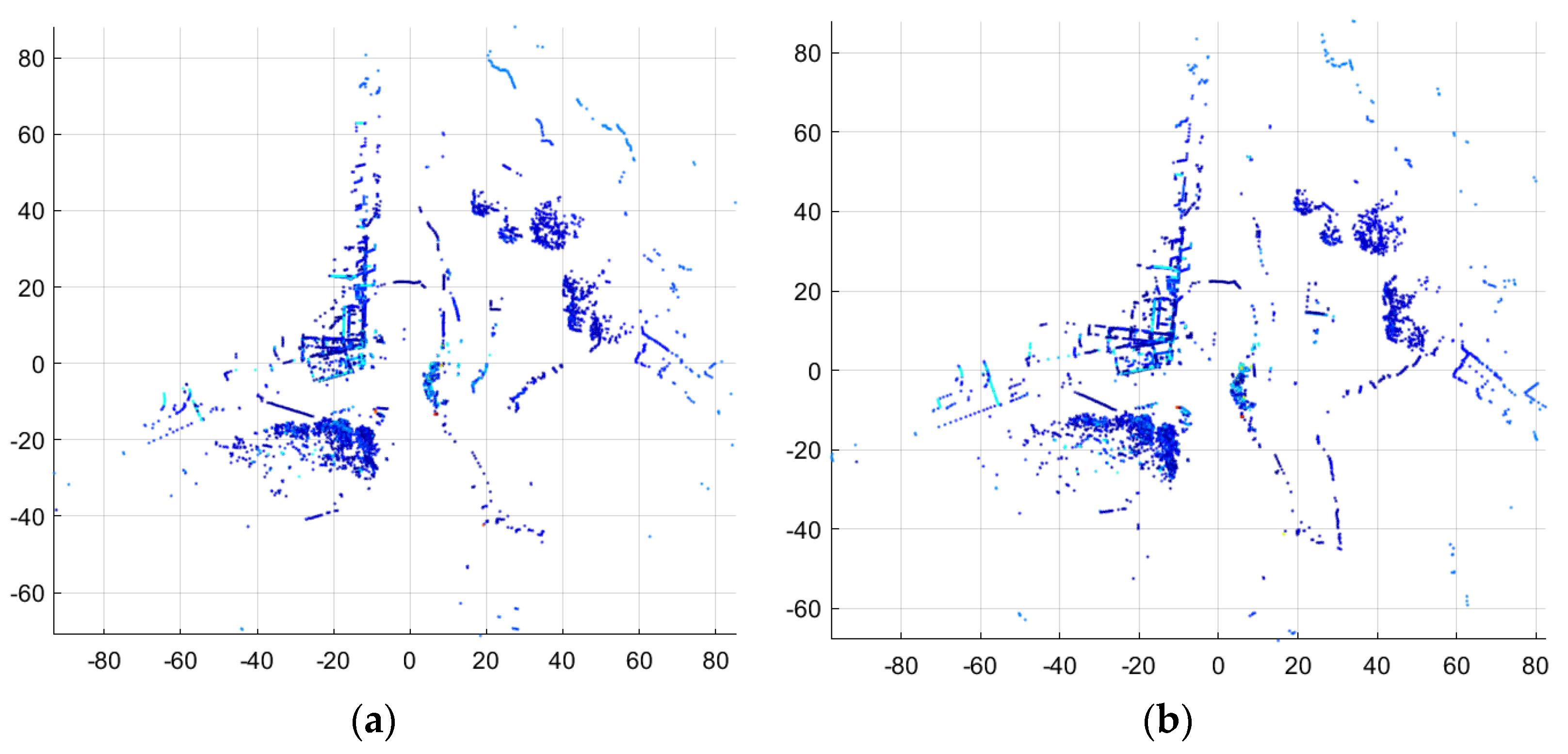
5.2. Lidar/GNSS/INS Mapping
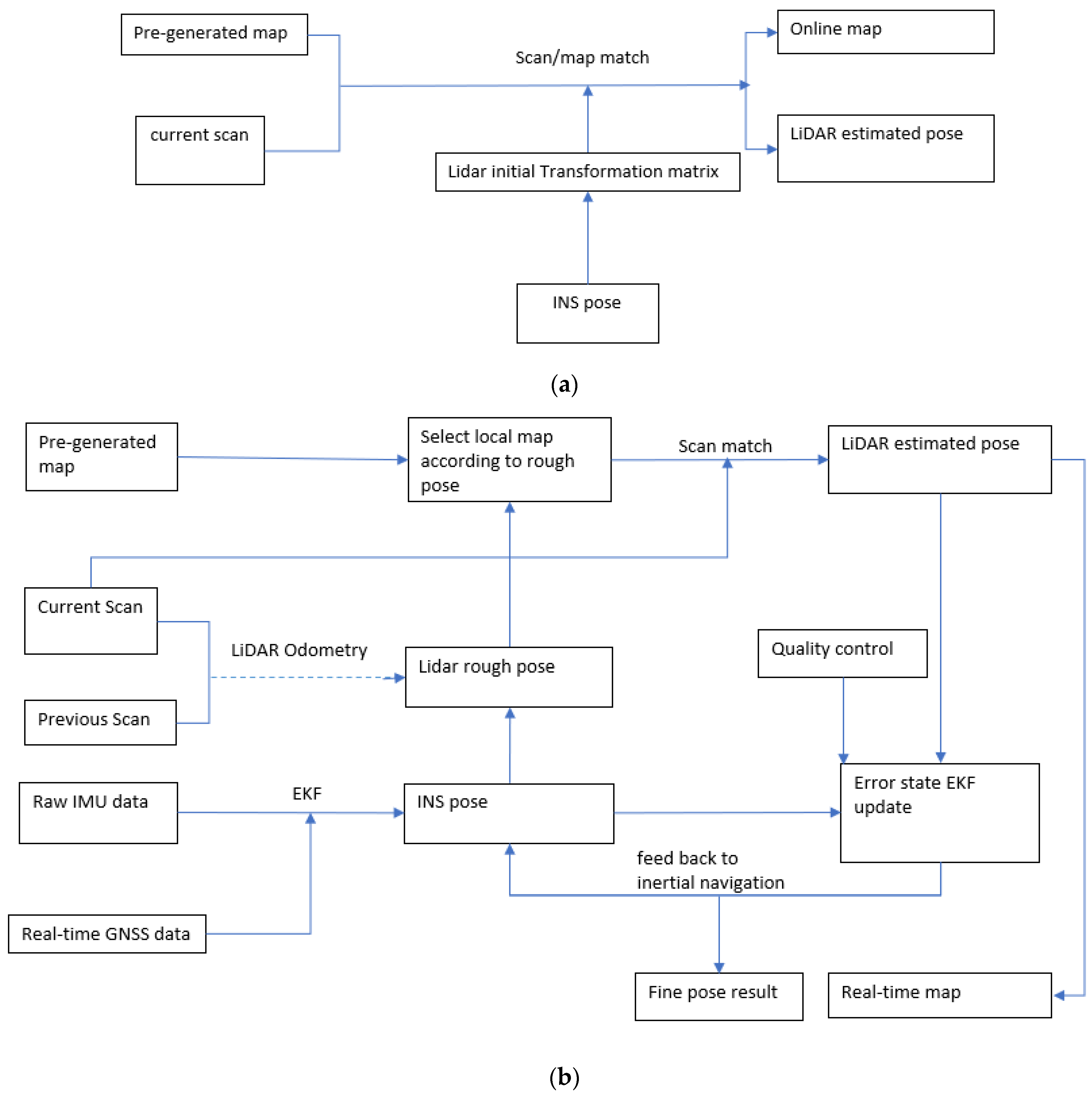
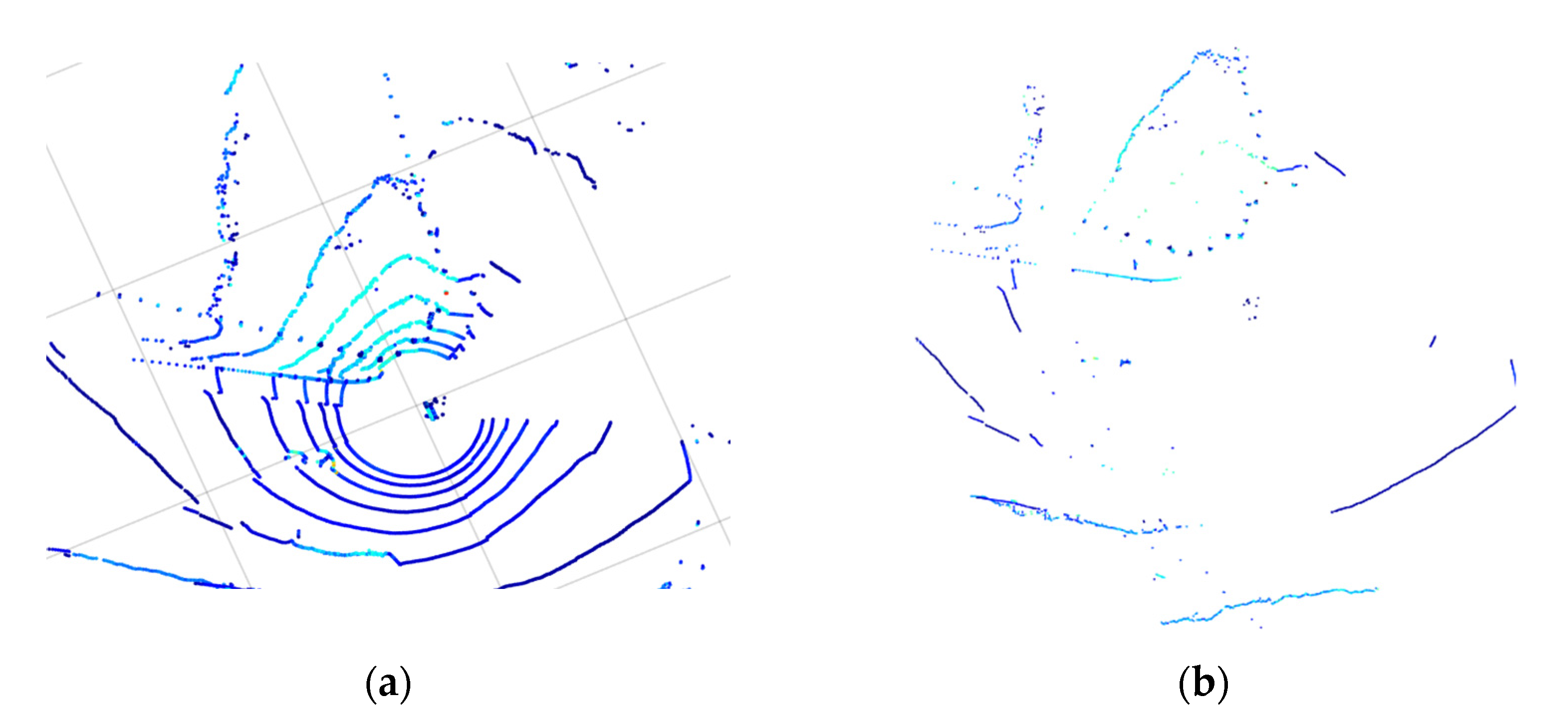
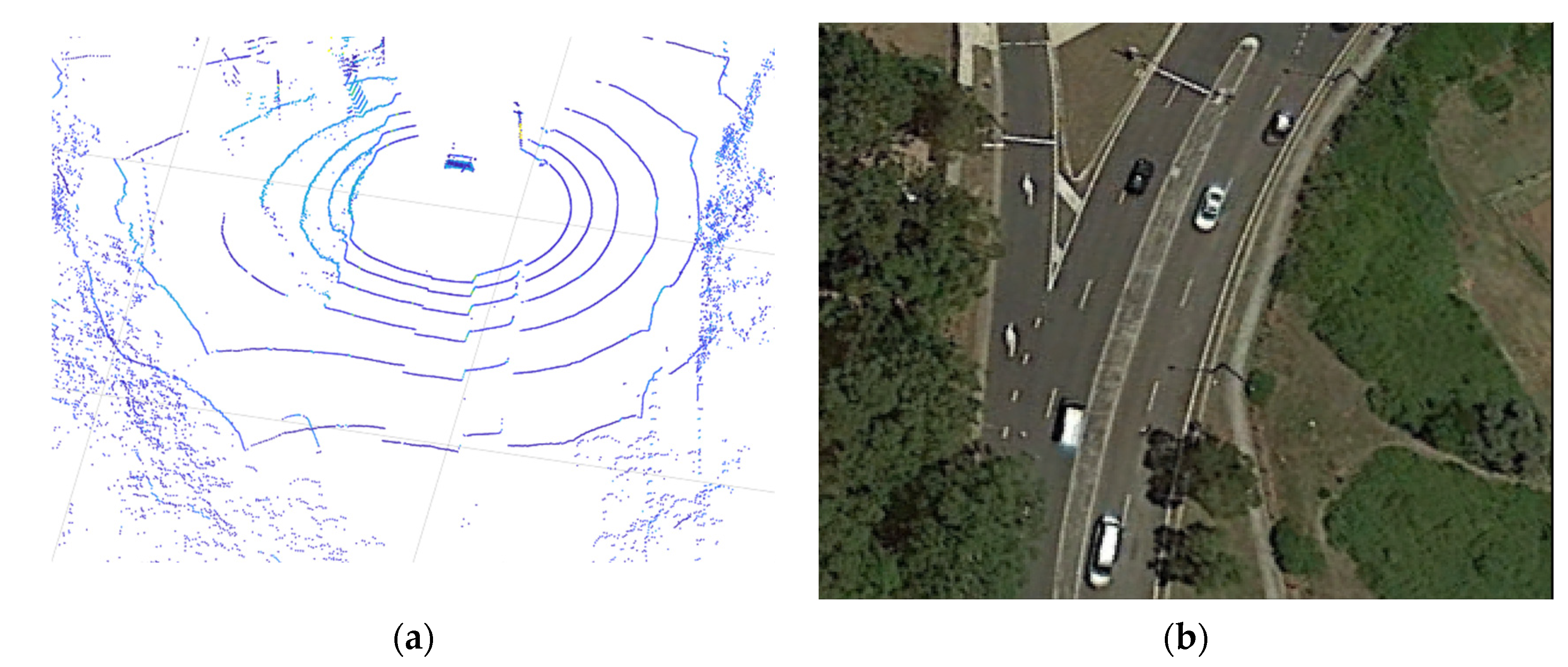
5.3. Localization with Lidar Scans and the GeoReferenced 3D Point Cloud Map Matching
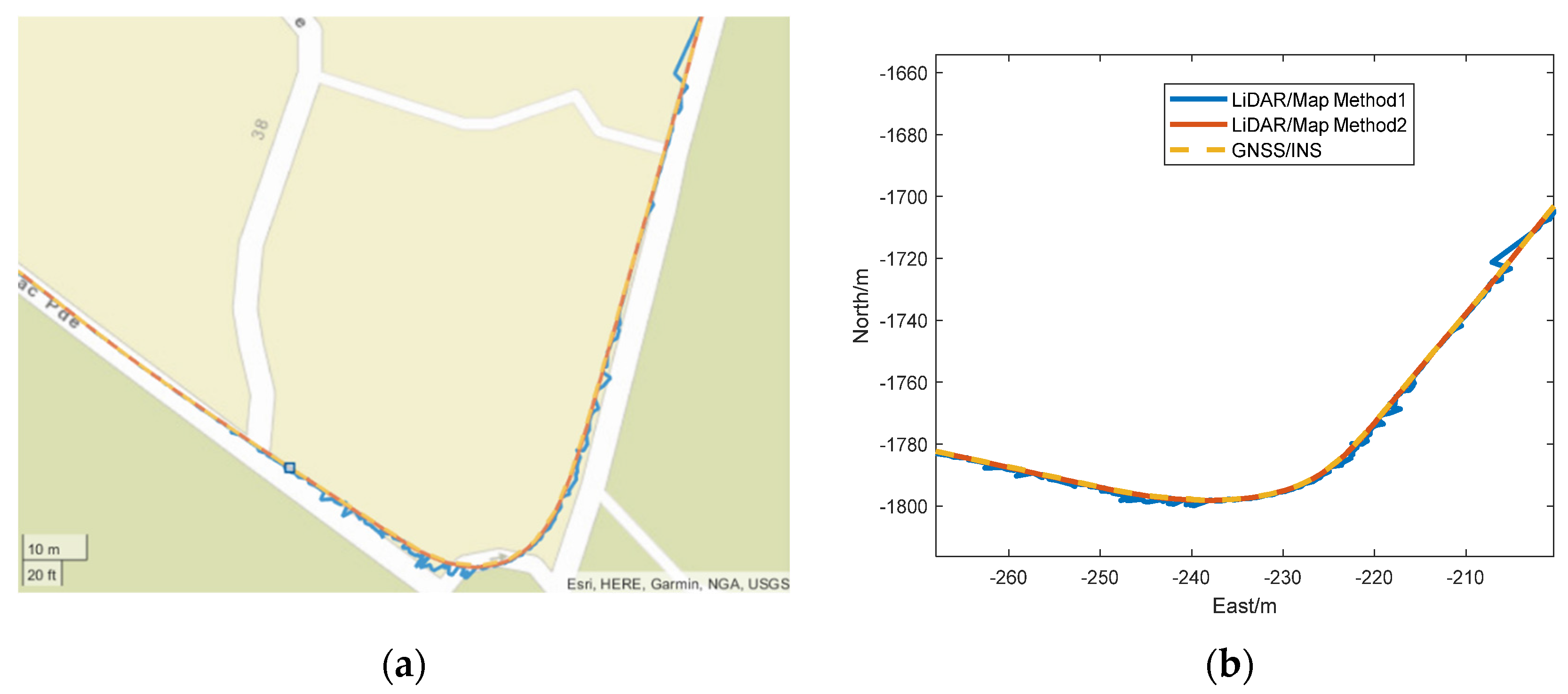
5.3.1. Estimation Results of Lidar/3D Map-Based Localization System
5.3.2. Quality Analysis of the Numerical Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning. In Proceedings of the 2015 Transportation Research Board Annual Meeting, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- Katrakazas, C.; Quddus, M.; Chen, W.H.; Deka, L. Real-time motion planning methods for autonomous on-road driving: State-of-the-art and future research directions. Transp. Res. C-EMER 2015, 60, 416–442. [Google Scholar] [CrossRef]
- Seif, H.G.; Hu, X. Autonomous driving in the iCity- HD maps as a key challenge of the automotive industry. Engineering 2016, 2, 159–162. [Google Scholar] [CrossRef]
- Suganuma, N.; Yamamto, D.; Yoneda, K. Localization for autonomous vehicle on urban roads. J. Adv. Control Autom. Robot. 2015, 1, 47–53. [Google Scholar]
- Fuentes-Pacheco, J.; Ruiz-Ascencio, J.; Rendon-Mancha, J.M. Visual simultaneous localization and mapping: A survey. Aritf. Intell. Rev. 2015, 43, 55–81. [Google Scholar] [CrossRef]
- Pupilli, M.; Calway, A. Real-time visual SLAM with resilience to erratic motion. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), 2006, New York, NY, USA, 17–22 June 2006; pp. 1244–1249. [Google Scholar] [CrossRef]
- He, L.; Lai, Z. The study and implementation of mobile GPS navigation system based on Google maps. In Proceedings of the International Conference on Computer and Information Application (ICCIA), Tianjin, China, 3–5 December 2010; pp. 87–90. [Google Scholar] [CrossRef]
- Hosseinyalamdary, S.; Balazadegan, Y.; Toth, C. Tracking 3D moving objects based on GPS/IMU navigation solution, Laser Scanner Point Cloud and GIS Data. ISPRS Int. J. Geo.-Inf. 2015, 4, 1301–1316. [Google Scholar] [CrossRef]
- Wang, L.; Zheng, Y.; Wang, J. Map-based Localization method for autonomous vehicle using 3D-LiDAR. IFCA Pap. 2017, 50, 278–281. [Google Scholar]
- Liu, R.; Wang, J.; Zhang, B. High definition map for automated driving, overview and analysis. J. Navig. 2020, 73, 324–341. [Google Scholar] [CrossRef]
- HERE. HERE HD Live Map—The Most Intelligent Vehicle Sensor. 2017. [Online]. Available online: https://here.com/en/products-services/products/here-hd-live-map (accessed on 19 March 2017).
- TomTom. 2017, RoadDNA, Robust and Scalable Localization Technology. Available online: http://download.tomtom.com/open/banners/RoadDNA-Product-Info-Sheet-1.pdf (accessed on 25 May 2019).
- Bresson, G.; Alsayed, Z.; Yu, L.; Glaser, S. Simultaneous localization and mapping: A survey of current trends in autonomous driving. IEEE Trans. Intell. Veh. 2017, 2, 194–220. [Google Scholar] [CrossRef]
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; Mccullough, F.; Mouzakitis, A. A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications. IEEE Internet Things 2018, 5, 829–846. [Google Scholar] [CrossRef]
- Wang, C.C.; Thorpe, C.; Thrun, S.; Hebert, M.; Durrant-Whyte, H. Simultaneous Localization, Mapping and Moving Object Tracking. Int. J. Robot. Res. 2007, 26, 889–916. [Google Scholar] [CrossRef]
- Smith, R.; Cheeseman, P. On the representation and estimation of spatial uncertainty. Int. J. Robot. Res. 1986, 5, 56–68. [Google Scholar] [CrossRef]
- Agarwal, P.; Burgard, W.; Stachniss, C. Geodetic approaches to mapping and relationship to graph-based SLAM. IEEE Robot. Autom. Mag. 2014, 21, 63–80. [Google Scholar] [CrossRef]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005; p. 246. [Google Scholar]
- Dissanayake, G.; Huang, S.; Wang, Z.; Ranasinghe, R. A review of recent developments in simultaneous localization and mapping. In Proceedings of the 2011 6th International Conference on Industrial and Information Systems, Kandy, Sri Lanka, 16–19 August 2011; pp. 477–482. [Google Scholar]
- Guivant, J.E.; Nebot, E.M. Optimization of the Simultaneous Localization and Map-building Algorithm for Real-time Implementation. IEEE Trans. Robot. Autom. 2001, 17, 242–257. [Google Scholar] [CrossRef]
- Williams, S.B. Efficient Solutions to Autonomous Mapping and Navigation Problems. Ph.D. Thesis, University of Sydney, Australian Centre for Field Robotics, Sydney, Australia, 2001. [Google Scholar]
- Bailey, T. Mobile Robot Localisation and Mapping in Extensive Outdoor Environments. Ph.D. Thesis, University of Sydney, Australian Centre for Field Robotics, Sydney, Australia, 2002. [Google Scholar]
- Paz, L.M.; Tardos, J.D.; Neira, J. Divide and Conquer: EKF SLAM in O(n). IEEE Trans. Robot. 2008, 24, 1107–1120. [Google Scholar] [CrossRef]
- Chli, M.; Davison, A.J. Automatically and efficiently inferring the hierarchical structure of visual maps. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 387–394. [Google Scholar] [CrossRef]
- Thrun, S.; Liu, Y. Multi-robot SLAM with Sparse Extended Information Filers. In Robotics Research. The Eleventh International Symposium, Siena, Italy, 19–22 October 2005; Dario, P., Chatila, R., Eds.; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2005; Volume 15, pp. 254–266. [Google Scholar]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved techniques for grid mapping with Rao-Blackwellized Particle Filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef]
- Eade, E.; Drummond, T. Scalable monocular SLAM. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; IEEE: New York, NY, USA, 2006; Volume 1, pp. 469–476. [Google Scholar] [CrossRef]
- Thrun, S.; Montemerlo, M.; Koller, D.; Wegbreit, B.; Nieto, J.; Nebot, E.M. Fastslam: An efficient solution to the simultaneous localization and mapping problem with unknown data association. J. Mach. Learn. Res. 2004, 4, 380–407. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Bailey, T.; Nieto, J.; Nebot, E. Consistency of the FastSLAM algorithm. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 424–429. [Google Scholar] [CrossRef]
- Press, W.; Teukolsky, S.; Vetterling, W.; Flannery, B. Numerical Recipes, 2nd ed.; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Wagner, R.; Frese, U.; Bauml, B. Graph SLAM with signed distance function maps on a humanoid robot. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2691–2698. [Google Scholar]
- Ni, K.; Steedly, D.; Dellaert, F. Tectonic SAM: Exact, out-of-core, submap-based SLAM. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 12 April 2007; pp. 1678–1685. [Google Scholar]
- Huang, S.; Wang, Z.; Dissanayake, G.; Frese, U. Iterated D-SLAM map joining: Evaluating its performance in terms of consistency, accuracy and efficiency. Auton. Robot. 2009, 27, 409–429. [Google Scholar] [CrossRef]
- Pinies, P.; Paz, L.M.; Tardos, J.D. CI-Graph: An efficient approach for large scale SLAM. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3913–3920. [Google Scholar]
- Ho, B.; Sodhi, P.; Teixeira, P.; Hsiao, M.; Kusnur, T.; Kaess, M. Virtual Occupancy Grid Map for Submap-based Pose Graph SLAM and Planning in 3D Environments. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2175–2182. [Google Scholar]
- Kaess, M.; Ranganathan, A.; Dellaert, F. iSAM: Incremental Smoothing and Mapping. IEEE Trans. Robot. 2008, 24, 1365–1378. [Google Scholar] [CrossRef]
- Kaess, M.; Johannsson, H.; Roberts, R.; Ila, V.; Leonard, J.J.; Dellaert, F. iSAM2: Incremental smoothing and mapping using the Bayes tree. Int. J. Robot. Res. 2012, 31, 216–235. [Google Scholar] [CrossRef]
- Ila, V.; Polok, L.; Šolony, M.; Smrz, P.; Zemcik, P. Fast covariance recovery in incremental nonlinear least square solvers. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4636–4643. [Google Scholar]
- Ila, V.; Polok, L.; Solony, M.; Svoboda, P. SLAM++-A highly efficient and temporally scalable incremental SLAM framework. Int. J. Robot. Res. 2017, 36, 210–230. [Google Scholar] [CrossRef]
- Leonard, J.J.; Durrant-Whyte, H.F. Mobile robot localization by tracking geometric beacons. IEEE Trans. Robot. Autom. 1991, 7, 376–382. [Google Scholar] [CrossRef]
- Dissanayake, M.W.M.G.; Newman, P.; Clark, S.; Durrant-Whyte, H.F.; Csorba, M. A solution to the simultaneous localization and map building (SLAM) problem. IEEE Trans. Robot. Autom. 2001, 17, 229–241. [Google Scholar] [CrossRef]
- Thrun, S.; Koller, D.; Ghahramani, Z.; Durrant-Whyte, H.; Ng, A.Y. Simultaneous mapping and localization with sparse extended information filters. In Proceedings of the Fifth International Workshop on Algorithmic Foundations of Robotics, Nice, France, 15–17 December 2002. [Google Scholar]
- Guivant, J.E.; Nebot, E.M. Solving computational and memory requirements of feature-based simultaneous localization and mapping algorithms. IEEE Trans. Robot. Autom. 2003, 19, 749–755. [Google Scholar] [CrossRef]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. FastSLAM: A factored solution to the simultaneous localization and mapping problem. In Proceedings of the AAAI National Conference on Artiflcial Intelligence, Edmonton, AB, Canada, 28 July–1 August 2002; pp. 593–598. [Google Scholar]
- Gutmann, J.-S.; Konolige, K. Incremental mapping of large cyclic environments. In Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation (CIRA), Monterey, CA, USA, 8–9 November 1999; pp. 318–325. [Google Scholar]
- Frese, U.; Larsson, P.; Duckett, T. A multilevel relaxation algorithm for simultaneous localisation and mapping. IEEE Trans. Robot. 2005, 21, 196–207. [Google Scholar] [CrossRef]
- Folkesson, J.; Christensen, H. Graphical SLAM—A self-correcting map. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA ’04, New Orleans, LA, USA, 26 April—1 May 2004; Volume 1, pp. 383–390. [Google Scholar] [CrossRef]
- Kummerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. g2o: A General Framework for Graph Optimization. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011. [Google Scholar]
- Grisetti, G.; Stachniss, C.; Grzonka, S.; Burgard, W. A tree parameterization for efficiently computing maximum likelihood maps using gradient descent. In Robotics: Science and Systems; Georgia Institute of Technology: Atlanta, GA, USA, 2007. [Google Scholar]
- Grisetti, G.; Stachniss, C.; Burgard, W. Non-linear Constraint Network Optimization for Efficient Map Learning. IEEE Trans. Intell. Transp. Syst. 2009, 10, 428–439. [Google Scholar] [CrossRef]
- Debeunne, C.; Vivet, D. A Review of Visual-LiDAR Fusion based Simultaneous Localization and Mapping. Sensors 2020, 20, 2068. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-ICP. In Proceedings of the Robotic: Science and Systems V Conference, Seattle, WA, USA, 28 June–1 July 2009. [Google Scholar]
- Censi, A. An ICP variant using a point-to-line metric. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 19–25. [Google Scholar] [CrossRef]
- Biber, P.; Strasser, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, pp. 2743–2748. [Google Scholar] [CrossRef]
- Li, J.; Zhong, R.; Hu, Q.; Ai, M. Feature-Based Laser Scan Matching and Its Application for Indoor Mapping. Sensors 2016, 16, 1265. [Google Scholar] [CrossRef]
- Wolcott, R.W.; Eustice, R.M. Fast LIDAR localization using multiresolution Gaussian mixture maps. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2814–2821. [Google Scholar] [CrossRef]
- Olson, E.B. Real-Time Correlative Scan Matching. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Ramos, F.T.; Fox, D.; Durrant-Whyte, H.F. Crf-Matching: Conditional Random Fields for Feature-Based Scan Matching. In Proceedings of the Robotics: Science and Systems, Atlanta, GA, USA, 27–30 June 2007. [Google Scholar]
- Woo, A.; Fidan, B.; Melek, W.W.; Zekavat, S.; Buehrer, R. Localization for Autonomous Driving. In Handbook of Position Location; Zekavat, S.A., Buehrer, R.M., Eds.; Wiley: Hoboken, NJ, USA, 2018; pp. 1051–1087. [Google Scholar] [CrossRef]
- Holder, M.; Hellwig, S.; Winner, H. Real-Time Pose Graph SLAM based on Radar. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 1145–1151. [Google Scholar] [CrossRef]
- Jose, E.; Adams, M. Relative radar cross section based feature identification with millimeter wave radar for outdoor SLAM. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; Volume 1, pp. 425–430. [Google Scholar]
- Jose, E.; Adams, M. An augmented state SLAM formulation for multiple lineof-sight features with millimetre wave radar. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Edmonton, AB, Canada, 2–6 August 2005; pp. 3087–3092. [Google Scholar]
- Rouveure, R.; Faure, P.; Monod, M. Radar-based SLAM without odometric sensor. In Proceedings of the ROBOTICS 2010: International Workshop of Mobile Robotics for Environment/Agriculture, Clermont Ferrand, France, 6–8 September 2010. [Google Scholar]
- Vivet, D.; Checchin, P.; Chapuis, R. Localization and Mapping Using Only a Rotating FMCW Radar Sensor. Sensors 2013, 13, 4527–4552. [Google Scholar] [CrossRef]
- Leonard, J.J.; Feder, H.J.S. A Computationally Efficient Method for Large-Scale Concurrent Mapping and Localization. Int. Symp. Robot. Res. 2000, 9, 169–178. [Google Scholar]
- Newman, P.; Leonard, J.J. Pure Range-Only Sub-Sea SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 2, pp. 1921–1926. [Google Scholar]
- Tardos, J.D.; Neira, J.; Newman, P.M.; Leonard, J.J. Robust Mapping and Localization in Indoor Environments Using Sonar Data. Int. J. Robot. Res. 2002, 21, 311–330. [Google Scholar] [CrossRef]
- Chong, T.J.; Tang, X.J.; Leng, C.H.; Yogeswaran, M.; Ng, O.E.; Chong, Y.Z. Sensor Technologies and Simultaneous Localization and Mapping (SLAM). Procedia Comput. Sci. 2015, 76, 174–179. [Google Scholar] [CrossRef]
- Aqel, M.O.A.; Marhaban, M.H.; Saripan, M.I.; Ismail, N.B. Review of visual odometry: Types, approaches, challenges, and applications. SpringerPlus 2016, 5, 1897. [Google Scholar] [CrossRef]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. Monoslam: Real-time single camera SLAM. Pattern Anal. Mach. Intell. IEEE Trans. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed]
- Engel, J.; Schöps, T.; Cremers, D. LSD-SLAM: Large-scale direct monocular SLAM. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 834–849. [Google Scholar]
- Engel, J.; Stückler, J.; Cremers, D. Large-scale direct SLAM with stereo cameras. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1935–1942. [Google Scholar] [CrossRef]
- Mei, C.; Sibley, G.; Cummins, M.; Newman, P.; Reid, I. RSLAM: A System for Large-Scale Mapping in Constant-Time Using Stereo. Int. J. Comput. Vis. 2011, 94, 198–214. [Google Scholar] [CrossRef]
- Paz, L.; Piniés, P.; Tardós, J.; Neira, J. Large-scale 6-DoF SLAM with stereo-inhand. IEEE Trans. Robot. 2008, 24, 946–957. [Google Scholar]
- Bellavia, F.; Fanfani, M.; Pazzaglia, F.; Colombo, C. Robust Selective Stereo SLAM without Loop Closure and Bundle Adjustment. In Image Analysis and Processing—ICIAP 2013. ICIAP 2013; Petrosino, A., Ed.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8156. [Google Scholar] [CrossRef]
- Harmat, A.; Sharf, I.; Trentini, M. Parallel tracking and mapping with multiple cameras on an unmanned aerial vehicle. In International Conference on Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 421–432. [Google Scholar]
- Urban, S.; Hinz, S. MultiCol-SLAM-A modular real-time multi-camera SLAM system. arXiv 2016, arXiv:1610.07336. [Google Scholar]
- Yang, S.; Scherer, S.A.; Yi, X.; Zell, A. Multi-camera visual SLAM for autonomous navigation of micro aerial vehicles. Robot. Auton. Syst. 2017, 93, 116–134. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, D.; Wang, D.; Song, W.; Wang, J.; Fu, M. Multi-camera visual SLAM for off-road navigation. Robot. Auton. Systs. 2020, 128, 103505. [Google Scholar] [CrossRef]
- Kitt, B.M.; Rehder, J.; Chambers, A.D.; Schonbein, M.; Lategahn, H.; Singh, S. Monocular visual odometry using a planar road model to solve scale ambiguity. In Proceedings of the European Conference on Mobile Robots; Örebro University: Örebro, Sweden, 2011; pp. 43–48. [Google Scholar]
- Heng, L.; Lee, G.H.; Pollefeys, M. Self-calibration and visual SLAM with a multi-camera system on a micro aerial vehicle. Auton. Robot. 2015, 39, 259–277. [Google Scholar] [CrossRef]
- Khoshelham, K.; Elberink, S.O. Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [PubMed]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D Mapping with an RGB-D Camera. IEEE Trans. Robot. 2014, 30, 177–187. [Google Scholar] [CrossRef]
- Kahler, O.; Prisacariu, V.; Ren, C.; Sun, X.; Torr, P.; Murray, D. Very high frame rate volumetric integration of depth images on mobile devices. IEEE Trans. Vis. Comput. Graph. 2015, 21, 1241–1250. [Google Scholar] [CrossRef] [PubMed]
- Henry, P.; Krainin, M.; Herbst, E.; Ren, X.; Fox, D. RGB-D mapping: Using Kinect-style depth cameras for dense 3D modeling of indoor environments. Int. J. Robot. Res. 2012, 31, 647–663. [Google Scholar] [CrossRef]
- Kerl, C.; Sturm, J.; Cremers, D. Dense visual SLAM for RGB-D cameras. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–8 November 2013; pp. 2100–2106. [Google Scholar]
- De Medeiros Esper, I.; Smolkin, O.; Manko, M.; Popov, A.; From, P.J.; Mason, A. Evaluation of RGB-D Multi-Camera Pose Estimation for 3D Reconstruction. Appl. Sci. 2022, 12, 4134. [Google Scholar] [CrossRef]
- Salas-Moreno, R.F.; Newcombe, R.A.; Strasdat, H.; Kelly, P.H.J.; Davison, A.J. SLAM++: Simultaneous localisation and mapping at the level of objects. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1352–1359. [Google Scholar]
- Tateno, K.; Tombari, F.; Navab, N. When 2.5D is not enough: Simultaneous reconstruction, segmentation and recognition on dense SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2295–2302. [Google Scholar]
- Milz, S.; Arbeiter, G.; Witt, C.; Abdallah, B.; Yogamani, S. Visual SLAM for Automated Driving: Exploring the Applications of Deep Learning. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; pp. 360–36010. [Google Scholar] [CrossRef]
- Davison, A.J. Real-time simultaneous localisation and mapping with a single camera. In Proceedings of the International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 1403–1410. [Google Scholar]
- Klein, G.; Murray, D.W. Parallel tracking and mapping for small AR workspaces. In Proceedings of the International Symposium on Mixed and Augmented Reality, Washington, DC, USA, 13–16 November 2007; pp. 225–234. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Newcombe, R.A.; Lovegrove, S.J.; Davison, A.J. DTAM: Dense tracking and mapping in real-time. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2320–2327. [Google Scholar]
- Forster, C.; Pizzoli, M.; Scaramuzza, D. SVO: Fast semi-direct monocular visual odometry. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 15–22. [Google Scholar]
- Caruso, D.; Engel, J.; Cremers, D. Large-scale direct SLAM for omnidirectional cameras. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 141–148. [Google Scholar] [CrossRef]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans. Comput. Vis. Appl. 2017, 9, 16. [Google Scholar] [CrossRef]
- Azzam, R.; Taha, T.; Huang, S.; Zweiri, Y. Feature-based visual simultaneous localization and mapping: A survey. SN Appl. Sci. 2020, 2, 224. [Google Scholar] [CrossRef]
- Valente, M.; Joly, C.; Fortelle, A. Fusing Laser Scanner and Stereo Camera in Evidential Grid Maps. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 18–21 November 2018; pp. 990–997. [Google Scholar] [CrossRef]
- López, E.; García, S.; Barea, R.; Bergasa, L.M.; Molinos, E.J.; Arroyo, R.; Romera, E.; Pardo, S. A Multi-Sensorial Simultaneous Localization and Mapping (SLAM) System for Low-Cost Micro Aerial Vehicles in GPS-Denied Environments. Sensors 2017, 17, 802. [Google Scholar] [CrossRef] [PubMed]
- Pandey, G.; Savarese, S.; McBride, J.R.; Eustice, R.M. Visually bootstrapped generalized ICP. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2660–2667. [Google Scholar] [CrossRef]
- Huang, S.S.; Ma, Z.Y.; Mu, H.; Fu, T.J.; Hu, S.-M. Lidar-Monocular Visual Odometry using Point and Line Features. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1091–1097. [Google Scholar] [CrossRef]
- Zhang, X.; Rad, A.B.; Wong, Y.-K. Sensor Fusion of Monocular Cameras and Laser Rangefinders for Line-Based Simultaneous Localization and Mapping (SLAM) Tasks in Autonomous Mobile Robots. Sensors 2012, 12, 429–452. [Google Scholar] [CrossRef] [PubMed]
- Jiang, G.; Lei, Y.; Jin, S.; Tian, C.; Ma, X.; Ou, Y. A Simultaneous Localization and Mapping (SLAM) Framework for 2.5D Map Building Based on Low-Cost LiDAR and Vision Fusion. Appl. Sci. 2019, 9, 2105. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. arXiv 2017, arXiv:1708.03852. [Google Scholar] [CrossRef]
- He, L.; Jin, Z.; Gao, Z. De-Skewing LiDAR Scan for Refinement of Local Mapping. Sensors 2020, 20, 1846. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Singh, S. LOAM: Lidar Odometry and Mapping in Real-time. In Proceedings of the 2014 Robotics: Science and Systems (RSS2014), Berkeley, CA, USA, 12–16 July 2014; Volume 2. [Google Scholar]
- Falquez, J.M.; Kasper, M.; Sibley, G. Inertial aided dense & semi-dense methods for robust direct visual odometry. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Republic of Korea, 9–14 October 2016; pp. 3601–3607. [Google Scholar]
- Fang, W.; Zheng, L.; Deng, H.; Zhang, H. Real-Time Motion Tracking for Mobile Augmented/Virtual Reality Using Adaptive Visual-Inertial Fusion. Sensors 2017, 17, 1037. [Google Scholar] [CrossRef] [PubMed]
- Lynen, S.; Sattler, T.; Bosse, M.; Hesch, J.; Pollefeys, M.; Siegwart, R. Get Out of My Lab: Large-scale, Real-Time Visual-Inertial Localization. In Proceedings of the Robotics: Science and Systems, Rome, Italy, 13–17 July 2015. [Google Scholar]
- Zhang, Z.; Liu, S.; Tsai, G.; Hu, H.; Chu, C.C.; Zheng, F. PIRVS: An Advanced Visual-Inertial SLAM System with Flexible Sensor Fusion and Hardware Co-Design. arXiv 2017, arXiv:1710.00893. [Google Scholar]
- Chen, C.; Zhu, H. Visual-inertial SLAM method based on optical flow in a GPS-denied environment. Ind. Robot Int. J. 2018, 45, 401–406. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, H.; Li, M.; You, S. A review of visual-inertial simultaneous localization and mapping from filtering-based and optimization-based perspectives. Robotics 2018, 7, 45. [Google Scholar] [CrossRef]
- Ye, H.; Chen, Y.; Liu, M. Tightly coupled 3D lidar inertial odometry and mapping. arXiv 2019, arXiv:1904.06993. [Google Scholar]
- Hemann, G.; Singh, S.; Kaess, M. Long-range gps-denied aerial inertial navigation with lidar localization. In Proceedings of the Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ International Conference on IEEE, Daejeon, Republic of Korea, 9–14 October 2016; pp. 1659–1666. [Google Scholar] [CrossRef]
- Zhang, H. Deep Learning Applications in Simultaneous Localization and Mapping. J. Phys. Conf. Ser. 2022, 2181, 012012. [Google Scholar] [CrossRef]
- Costante, G.; Mancini, M.; Valigi, P.; Ciarfuglia, T.A. Exploring Representation Learning with CNNs for Frame-to-Frame Ego-Motion Estimation. IEEE Robot. Autom. Lett. 2016, 1, 18–25. [Google Scholar] [CrossRef]
- Costante, G.; Ciarfuglia, T.A. LS-VO: Learning Dense Optical Subspace for Robust Visual Odometry Estimation. IEEE Robot. Autom. Lett. 2018, 3, 1735–1742. [Google Scholar] [CrossRef]
- Muller, P.; Savakis, A. Flowdometry: An Optical Flow and Deep Learning Based Approach to Visual Odometry. In Proceedings of the 2017 IEEE Winter Conference on Applications of Computer Vision (WACV), Santa Rosa, CA, USA, 24–31 March 2017; pp. 624–631. [Google Scholar] [CrossRef]
- Saputra, M.R.; Gusmão, P.P.; Wang, S.; Markham, A.; Trigoni, A. Learning Monocular Visual Odometry through Geometry-Aware Curriculum Learning. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3549–3555. [Google Scholar]
- Zhu, R.; Yang, M.; Liu, W.; Song, R.; Yan, B.; Xiao, Z. DeepAVO: Efficient pose refining with feature distilling for deep Visual Odometry. Neurocomputing 2022, 467, 22–35. [Google Scholar] [CrossRef]
- Wang, S.; Clark, R.; Wen, H.; Trigoni, N. DeepVO: Towards end-to-end visual odometry with deep Recurrent Convolutional Neural Networks. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2043–2050. [Google Scholar] [CrossRef]
- Xue, F.; Wang, Q.; Wang, X.; Dong, W.; Wang, J.; Zha, H. Guided Feature Selection for Deep Visual Odometry. In Computer Vision—ACCV 2018, ACCV 2018, Lecture Notes in Computer Science; Jawahar, C., Li, H., Mori, G., Schindler, K., Eds.; Springer: Cham, Switzerland, 2018; Volume 11366. [Google Scholar] [CrossRef]
- Li, R.; Wang, S.; Long, Z.; Gu, D. UnDeepVO: Monocular Visual Odometry Through Unsupervised Deep Learning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 7286–7291. [Google Scholar] [CrossRef]
- Tateno, K.; Tombari, F.; Laina, I.; Navab, N. CNN-SLAM: Real-Time Dense Monocular SLAM with Learned Depth Prediction. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6565–6574. [Google Scholar] [CrossRef]
- Ma, F.; Karaman, S. Sparse-to-Dense: Depth Prediction from Sparse Depth Samples and a Single Image. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 4796–4803. [Google Scholar] [CrossRef]
- Bloesch, M.; Czarnowski, J.; Clark, R.; Leutenegger, S.; Davison, A.J. CodeSLAM—Learning a Compact, Optimisable Representation for Dense Visual SLAM. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2560–2568. [Google Scholar]
- DeTone, D.; Malisiewicz, T.; Rabinovich, A. Toward geometric deep slam. arXiv 2017, arXiv:1707.07410. [Google Scholar]
- Yang, N.; Stumberg, L.V.; Wang, R.; Cremers, D. D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 1278–1289. [Google Scholar]
- Li, Y.; Ushiku, Y.; Harada, T. Pose Graph optimization for Unsupervised Monocular Visual Odometry. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5439–5445. [Google Scholar] [CrossRef]
- Gao, X.; Zhang, T. Unsupervised learning to detect loops using deep neural networks for visual SLAM system. Auton. Robot 2017, 41, 1–18. [Google Scholar] [CrossRef]
- Memon, A.R.; Wang, H.; Hussain, A. Loop closure detection using supervised and unsupervised deep neural networks for monocular SLAM systems. Robot. Auton. Syst. 2020, 126, 103470. [Google Scholar] [CrossRef]
- Wang, Z.; Peng, Z.; Guan, Y.; Wu, L. Manifold Regularization Graph Structure Auto-Encoder to Detect Loop Closure for Visual SLAM. IEEE Access 2019, 7, 59524–59538. [Google Scholar] [CrossRef]
- Qin, C.; Zhang, Y.; Liu, Y.; Lv, G. Semantic loop closure detection based on graph matching in multi-objects scenes. J. Vis. Commun. Image Represent. 2021, 76, 103072. [Google Scholar] [CrossRef]
- Li, R.; Wang, S.; Gu, D. DeepSLAM: A Robust Monocular SLAM System with Unsupervised Deep Learning. IEEE Trans. Ind. Electron. 2021, 68, 3577–3587. [Google Scholar] [CrossRef]
- Chen, W.; Shang, G.; Ji, A.; Zhou, C.; Wang, X.; Xu, C.; Li, Z.; Hu, K. An Overview on Visual SLAM: From Tradition to Semantic. Remote Sens. 2022, 14, 3010. [Google Scholar] [CrossRef]
- Zhang, H.; Geiger, A.; Urtasun, R. Understanding High-Level Semantics by Modeling Traffic Patterns. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 1–8 December 2013; pp. 3056–3063. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking Atrous Convolution for Semantic Image Segmentation. arXiv 2017. [Google Scholar] [CrossRef]
- Zhao, Z.; Mao, Y.; Ding, Y.; Ren, P.; Zheng, N. Visual-Based Semantic SLAM with Landmarks for Large-Scale Outdoor Environment. In Proceedings of the 2019 2nd China Symposium on Cognitive Computing and Hybrid Intelligence (CCHI), Xi’an, China, 21–22 September 2019; pp. 149–154. [Google Scholar]
- Li, R.; Gu, D.; Liu, Q.; Long, Z.; Hu, H. Semantic Scene Mapping with Spatio-temporal Deep Neural Network for Robotic Applications. Cogn. Comput. 2018, 10, 260–271. [Google Scholar] [CrossRef]
- Rosinol, A.; Abate, M.; Chang, Y.; Carlone, L. Kimera: An Open-Source Library for Real-Time Metric-Semantic Localization and Mapping. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Virtually, 31 May–31 August 2020; pp. 1689–1696. [Google Scholar]
- Qin, T.; Zheng, Y.; Chen, T.; Chen, Y.; Su, Q. A Light-Weight Semantic Map for Visual Localization towards Autonomous Driving. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 11248–11254. [Google Scholar]
- McCormac, J.; Handa, A.; Davison, A.; Leutenegger, S. SemanticFusion: Dense 3D semantic mapping with convolutional neural networks. In IEEE International Conference on Robotics and Automation(ICRA); IEEE: New York, NY, USA, 2017; pp. 4628–4635. [Google Scholar]
- Schörghuber, M.; Steininger, D.; Cabon, Y.; Humenberger, M.; Gelautz, M. SLAMANTIC—Leveraging Semantics to Improve VSLAM in Dynamic Environments. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Republic of Korea, 27–28 October 2019; pp. 3759–3768. [Google Scholar]
- Yu, C.; Liu, Z.; Liu, X.; Xie, F.; Yang, Y.; Wei, Q.; Qiao, F. DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1168–1174. [Google Scholar]
- Sualeh, M.; Kim, G.-W. Semantics Aware Dynamic SLAM Based on 3D MODT. Sensors 2021, 21, 6355. [Google Scholar] [CrossRef]
- Han, S.; Xi, Z. Dynamic Scene Semantics SLAM Based on Semantic Segmentation. IEEE Access 2020, 8, 43563–43570. [Google Scholar] [CrossRef]
- Duan, C.; Junginger, S.; Huang, J.; Jin, K.; Thurow, K. Deep Learning for Visual SLAM in Transportation Robotics: A review. Transp. Saf. Environ. 2019, 1, 177–184. [Google Scholar] [CrossRef]
- Li, R.; Wang, S.; Gu, D. Ongoing Evolution of Visual SLAM from Geometry to Deep Learning: Challenges and Opportunities. Cogn. Comput. 2018, 10, 875–889. [Google Scholar] [CrossRef]
- Chen, C.; Wang, B.; Lu, C.X.; Trigoni, A.; Markham, A. A Survey on Deep Learning for Localization and Mapping: Towards the Age of Spatial Machine Intelligence. arXiv 2020, arXiv:abs/2006.12567. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Han, L.; Lin, Y.; Du, G.; Lian, S. DeepVIO: Self-supervised Deep Learning of Monocular Visual Inertial Odometry using 3D Geometric Constraints. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Venetian Macao, Macau, China, 3–8 November 2019; pp. 6906–6913. [Google Scholar]
- Clark, R.; Wang, S.; Wen, H.; Markham, A.; Trigoni, N. VINet: Visual-Inertial Odometry as a Sequence-to-Sequence Learning Problem. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; Volume 31. [Google Scholar] [CrossRef]
- Gurturk, M.; Yusefi, A.; Aslan, M.F.; Soycan, M.; Durdu, A.; Masiero, A. The YTU dataset and recurrent neural network based visual-inertial odometry. Measurement 2021, 184, 109878. [Google Scholar] [CrossRef]
- Da Silva, M.A.V. SLAM and Data Fusion for Autonomous Vehicles: From Classical Approaches to Deep Learning Methods. Machine Learning [cs.LG]. Ph.D. Thesis, Université Paris Sciences et Lettres, Paris, France, 2019. (In English). [Google Scholar]
- Velas, M.; Spanel, M.; Hradis, M.; Herout, A. Cnn for imu assisted odometry estimation using velodyne lidar. In Proceedings of the 2018 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Torres Vedras, Portugal, 25–27 April 2018; IEEE: New York, NY, USA, 2018; pp. 71–77. [Google Scholar]
- Li, Q.; Chen, S.; Wang, C.; Li, X.; Wen, C.; Cheng, M.; Li, J. LO-Net: Deep Real-Time Lidar Odometry. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 8465–8474. [Google Scholar]
- Li, B.; Hu, M.; Wang, S.; Wang, L.; Gong, X. Self-supervised Visual-LiDAR Odometry with Flip Consistency. In Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2021; pp. 3843–3851. [Google Scholar] [CrossRef]
- Milioto, A.; Vizzo, I.; Behley, J.; Stachniss, C. RangeNet++: Fast and Accurate LiDAR Semantic Segmentation. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4213–4220. [Google Scholar] [CrossRef]
- Wu, B.; Wan, A.; Yue, X.; Keutzer, K. SqueezeSeg: Convolutional Neural Nets with Recurrent CRF for Real-Time Road-Object Segmentation from 3D LiDAR Point Cloud. In Proceedings of the IEEE International Conference on Robotics & Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018. [Google Scholar]
- Wu, B.; Zhou, X.; Zhao, S.; Yue, X.; Keutzer, K. SqueezeSegV2: Improved Model Structure and Unsupervised Domain Adaptation for Road-Object Segmentation from a LiDAR Point Cloud. In Proceedings of the IEEE International Conference on Robotics & Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Chen, X.; Li, S.; Mersch, B.; Wiesmann, L.; Gall, J.; Behley, J.; Stachniss, C. Moving Object Segmentation in 3D LiDAR Data: A Learning-Based Approach Exploiting Sequential Data. IEEE Robot. Autom. Lett. 2021, 6, 6529–6536. [Google Scholar] [CrossRef]
- Yue, J.; Wen, W.; Han, J.; Hsu, L. LiDAR data enrichment using Deep Learning Based on High-Resolution Image: An Approach to Achieve High-Performance LiDAR SLAM Using Low-cost LiDAR. arXiv 2020, arXiv:2008.03694. [Google Scholar]
- Jo, K.; Kim, C.; Sunwoo, M. Simultaneous localization and map change update for the high definition map-based autonomous driving car. Sensors 2018, 18, 3145. [Google Scholar] [CrossRef] [PubMed]
- Kim, C.; Cho, S.; Sunwoo, M.; Jo, K. Crowd-sourced mapping of new feature layer for high-definition map. Sensors 2018, 18, 1472. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Zhang, M.; Liu, J. Real-Time HD Map Change Detection for Crowdsourcing Update Based on Mid-to-High-End Sensors. Sensors 2021, 21, 2477. [Google Scholar] [CrossRef] [PubMed]
- Kummerle, R.; Hahnel, D.; Dolgov, D.; Thrun, S.; Burgard, W. Autonomous driving in a multi-level parking structure. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3395–3400. [Google Scholar]
- Lee, H.; Chun, J.; Jeon, K. Autonomous back-in parking based on occupancy grid map and EKF SLAM with W-band radar. In Proceedings of the 2018 International Conference on Radar (RADAR), Brisbane, QLD, Australia, 27–31 August 2018; pp. 1–4. [Google Scholar]
- Im, G.; Kim, M.; Park, J. Parking line based SLAM approach using AVM/LiDAR sensor fusion for rapid and accurate loop closing and parking space detection. Sensors 2019, 19, 4811. [Google Scholar] [CrossRef] [PubMed]
- Qin, T.; Chen, T.; Chen, Y.; Su, Q. AVP-SLAM: Semantic Visual Mapping and Localization for Autonomous Vehicles in the Parking Lot. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5939–5945. [Google Scholar] [CrossRef]
- Zheng, S.; Wang, J. High definition map based vehicle localization for highly automated driving. In Proceedings of the 2017 International Conference on Localization and GNSS (ICL-GNSS), Nottingham, UK, 27–29 June 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Li, H.; Nashashibi, F. Multi-vehicle cooperative localization using indirect vehicle-to-vehicle relative pose estimation. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety, Istanbul, Turkey, 24–27 July 2012; pp. 267–272. [Google Scholar]
- Wolcott, R.W.; Eustice, R.M. Visual Localization within LiDAR maps for automated urban driving. In Proceedings of the Intelligent Robots and Systems (IROS2014), 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 176–183. [Google Scholar]
- Schreiber, M.; Knöppel, C.; Franke, U. LaneLoc: Lane marking based localization using highly accurate maps. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast City, QLD, Australia, 23 June 2013; pp. 449–454. [Google Scholar]
- Jeong, J.; Cho, Y.; Kim, A. Road-SLAM: Road marking based SLAM with lane-level accuracy. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; p. 1736-1473. [Google Scholar] [CrossRef]
- Vu, T.D. Vehicle Perception: Localization, Mapping with Detection, Classification and Tracking of Moving Objects. Ph.D. Thesis, Institut National Polytechnique de Grenoble-INPG, Grenoble, France, 2009. [Google Scholar]
- Wang, C.C.; Thorpe, C.; Thrun, S. Online simultaneous localization and mapping with detection and tracking of moving objects: Theory and results from a ground vehicle in crowded urban areas. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 842–849. [Google Scholar]
- Fei, Y. Real-Time Detecting and Tracking of Moving Objects Using 3D LIDAR; Zhejian University: Hangzhou, China, 2012. [Google Scholar]
- Miller, W. RoboSense Develops $200 LiDAR System for Autonomous Vehicles. Electronic Products. Available online: https://www.electronicproducts.com/Automotive/RoboSense_develops_200_LiDAR_system_for_autonomous_vehicles.aspxMorales (accessed on 1 October 2022).
- Rone, W.; Ben-Tzvi, P. Mapping, localization and motion planning in mobile multi-robotic systems. Robotica 2013, 31, 1–23. [Google Scholar] [CrossRef]
- Mentasti, S.; Matteucci, M. Multi-layer occupancy grid mapping for autonomous vehicles navigation. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 2–4 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Li, H.; Tsukada, M.; Nashashibi, F.; Parent, M. Multi-Vehicle Cooperative Local Mapping: A Methodology Based on Occupancy Grid Map Merging. IEEE Trans. Intell. Transp. Syst. 2014, 15, 12. [Google Scholar] [CrossRef]
- Wang, X.; Wang, W.; Yin, X.; Xiang, C.; Zhang, Y. A New Grid Map Construction Method for Autonomous Vehicles. IFAC-PapersOnLine 2018, 51, 377–382. [Google Scholar] [CrossRef]
- Mutz, F.; Oliveira-Santos, T.; Forechi, A.; Komati, K.S.; Badue, C.; França, F.M.G.; De Souza, A.F. What is the best grid-map for self-driving cars localization? An evaluation under diverse types of illumination, traffic, and environment. Expert Syst. Appl. 2021, 179, 115077. [Google Scholar] [CrossRef]
- Yu, S.; Fu, C.; Gostar, A.K.; Hu, M. A Review on Map-Merging Methods for Typical Map Types in Multiple-Ground-Robot SLAM Solutions. Sensors 2020, 20, 6988. [Google Scholar] [CrossRef]
- Javanmardi, E.; Gu, Y.; Javanmardi, M.; Kamijo, S. Autonomous vehicle self-localization based on abstract map and multi-channel LiDAR in urban area. IATSS Res. 2019, 43, 1–13. [Google Scholar] [CrossRef]
- Ort, T.; Paull, L.; Rus, D. Autonomous Vehicle Navigation in Rural Environments without Detailed Prior Maps. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 2040–2047. [Google Scholar] [CrossRef]
- Badue, C.; Guidolini, R.; Carneiro, R.V.; Azevedo, P.; Cardoso, V.B.; Forechi, A.; Jesus, L.; Berriel, R.; Paixão, T.M.; Mutz, F.; et al. Self-driving cars: A survey. Expert Syst. Appl. 2021, 165, 113816. [Google Scholar] [CrossRef]
- Li, L.; Yang, M.; Wang, B.; Wang, C. An overview on sensor map based localization for automated driving. In Proceedings of the 2017 Joint Urban Remote Sensing Event (JURSE), Dubai, United Arab Emirates, 6–8 March 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Haklay, M.; Weber, P. OpenStreetMap: User-Generated Street Maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- Bernuy, F.; Ruiz-del-Solar, J. Topological Semantic Mapping and Localization in Urban Road Scenarios. J. Intell. Robot. Syst. 2018, 92, 19–32. [Google Scholar] [CrossRef]
- Bender, P.; Ziegler, J.; Stiller, C. Lanelets: Efficient map representation for autonomous driving. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 420–425. [Google Scholar] [CrossRef]
- Dube, R.; Cramariuc, A.; Dugas, D.; Nieto, J.; Siegwart, R.; Cadena, C. SegMap: 3d segment mapping using data-driven descriptors. Robotics: Science and Systems (RSS). arXiv 2018, arXiv:1804.09557/. [Google Scholar]
- Zhong, F.; Wang, S.; Zhang, Z.; Chen, C.; Wang, Y. Detect-slam: Making object detection and slam mutually beneficial. In Proceedings of the 2018 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Tahoe, NV, USA, 12–15 March 2018; pp. 1001–1010. [Google Scholar] [CrossRef]
- Ros, G.; Ramos, S.; Granados, M.; Bakhtiary, A.; Vazquez, D.; Lopez, A.M. Vision-Based Offline-Online Perception Paradigm for Autonomous Driving. In Proceedings of the 2015 IEEE Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 5–9 January 2015; pp. 231–238. [Google Scholar] [CrossRef]
- Hempel, T.; Al-Hamadi, A. An online semantic mapping system for extending and enhancing visual SLAM. Eng. Appl. Artif. Intell. 2022, 111, 104830. [Google Scholar] [CrossRef]
- Nakajima, Y.; Saito, H. Efficient object-oriented semantic mapping with object detector. IEEE Access 2019, 7, 3206–3213. [Google Scholar] [CrossRef]
- Paz, D.; Zhang, H.; Li, Q.; Xiang, H.; Christensen, H.I. Probabilistic Semantic Mapping for Urban Autonomous Driving Applications. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 2059–2064. [Google Scholar] [CrossRef]
- Chen, X.; Milioto, A.; Palazzolo, E.; Giguere, P.; Behley, J.; Stachniss, C. SuMa++: Efficient LiDAR-based semantic slam. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4530–4537. [Google Scholar] [CrossRef]
- Li, L.; Yang, M. Road dna based localization for autonomous vehicles. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium(IV), Gothenburg, Sweden, 19–22 June 2016; pp. 883–888. [Google Scholar] [CrossRef]
- Huang, S.; Lai, Y.; Frese, U.; Dissanayake, G. How far is SLAM from a linear least squares Problems? In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3011–3016. [Google Scholar]
- Bresson, G.; Aufrere, R.; Chapuis, R. A general consistent decentralized SLAM solution. Robot Auton. Syst. 2015, 74, 128–147. [Google Scholar] [CrossRef]
- Martinez-Cantin, R.; Castellanos, J.A. Bounding uncertainty in EKF-SLAM: The robocentric local approach. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 430–435. [Google Scholar] [CrossRef]
- Martinez-Cantin, R.; Castellanos, J.A. Unscented SLAM for large-scale outdoor environments. In Proceedings of the 2005 IEEE/RSJ International Conference on International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3427–3432. [Google Scholar]
- Huang, G.P.; Mourikis, A.I.; Roumeliotis, S.I. Observability-based rules for designing consistent EKF SLAM estimators. Int. J. Robot. Res. 2010, 29, 502–528. [Google Scholar] [CrossRef]
- Tan, F.; Lohmiller, W.; Slotine, J. Simultaneous Localization and Mapping without Linearization. arXiv 2015, arXiv:1512.08829. [Google Scholar]
- Cugliari, M.; Martinelli, F. A FastSLAM Algorithm Based on the Unscented Filtering with Adaptive Selective Resampling. In Field and Service Robotics; Laugier, C., Siegwart, R., Eds.; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 42. [Google Scholar] [CrossRef]
- Wang, H.; Wei, S.; Che, Y. An improved rao-blackwellized particle filter for slam. In Proceedings of the International Symposium on Intelligent Information Technology Application Workshops 2008, II’AW’08, Shanghai, China, 21–22 December 2008; pp. 515–518. [Google Scholar]
- He, B.; Ying, L.; Zhang, S.; Feng, X.; Yan, T. Autonomous navigation based on unscented-FastSLAM using particle swarm optimization for autonomous underwater vehicles. Measurement 2015, 71, 89–101. [Google Scholar] [CrossRef]
- Zhang, F.; Li, S.; Yuan, S.; Sun, E.; Zhao, L. Algorithms analysis of mobile robot SLAM based on Kalman and particle filter. In Proceedings of the 2017 9th International Conference on Modelling, Identification and Control (ICMIC), Kunming, China, 10–12 July 2017; pp. 1050–1055. [Google Scholar] [CrossRef]
- Olson, E.; Leonard, J.; Teller, S. Fast iterative alignment of pose graphs with poor initial estimates. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 2262–2269. [Google Scholar] [CrossRef]
- Carlone, L.; Aragues, R.; Castellanos, J.; Bona, B. A linear approximation for graph-based simultaneous localization and mapping. In Proceedings of the Robotics: Science and Systems, Los Angeles, CA, USA, 27–30 June 2011. [Google Scholar]
- Carlone, L.; Aragues, R.; Castellanos, J.; Bona, B. A fast and accurate approximation for planar pose graph optimization. Int. J. Robot. Res. 2014, 33, 965–987. [Google Scholar] [CrossRef]
- Hu, G.; Khosoussi, K.; Huang, S. Towards a reliable SLAM back-end. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 37–43. [Google Scholar] [CrossRef]
- Carlone, L.; Tron, R.; Daniilidis, K.; Dellaert, F. Initialization techniques for 3D SLAM: A survey on rotation estimation and its use in pose graph optimization. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4597–4604. [Google Scholar] [CrossRef]
- Harsányi, K.; Kiss, A.; Szirányi, T.; Majdik, A. MASAT: A fast and robust algorithm for pose-graph initialization. Pattern Recognit. Lett. 2020, 129, 131–136. [Google Scholar] [CrossRef]
- Campos, C.; Montiel, J.M.M.; Tardos, J.D. Inertial-Only Optimization for Visual-Inertial Initialization, 2020 International Conference on Robotics and Automation. arXiv 2020, arXiv:2003.0576. [Google Scholar]
- Skoglund, M.A.; Sjanic, Z.; Gustafsson, F. Initialisation and Estimation Methods for Batch Optimization of Inertial/Visual SLAM; Linköping University: Linköping, Sweden, 2013. [Google Scholar]
- Dong-Si, T.-C.; Mourikis, A.I. Estimator initialization in vision-aided inertial navigation with unknown camera-IMU calibration. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1064–1071. [Google Scholar] [CrossRef]
- Mu, X.; Chen, J.; Zhou, Z.; Leng, Z.; Fan, L. Accurate Initial State Estimation in a Monocular Visual-Inertial SLAM System. Sensors 2018, 18, 506. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.; Zhang, L.; Chen, Q. An Improved Initialization Method for Monocular Visual-Inertial SLAM. Electronics 2021, 10, 3063. [Google Scholar] [CrossRef]
- Levinson, L.; Thrun, S. Robust Vehicle Localization in Urban Environments Using Probabilistic Maps. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 4372–4378. [Google Scholar] [CrossRef]
- Wangsiripitak, S.; Murray, D.W. Avoiding moving outliers in visual SLAM by tracking moving objects. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Asmar, D. Vision-Inertial SLAM Using Natural Features in Outdoor Environments. Ph.D. Thesis, University of Waterloo, Waterloo, ON, Canada, 2006. [Google Scholar]
- Morales, Y.; Takeuchi, E.; Tsubouchi, T. Vehicle localization in outdoor woodland environments with sensor fault detection. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 449–454. [Google Scholar] [CrossRef]
- Kitt, B.; Geiger, A.; Lategahn, H. Visual odometry based on stereo image sequences with RANSAC-based outlier rejection scheme. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, University of Califomia, San Diego, CA, USA, 21–24 June 2010; pp. 486–492. [Google Scholar]
- Xie, L.; Wang, S.; Markham, A.; Trigoni, N. GraphTinker: Outlier rejection and inlier injection for pose graph SLAM. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6777–6784. [Google Scholar]
- Sünderhauf, N.; Protzel, P. Switchable constraints for robust pose graph SLAM. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 1879–1884. [Google Scholar]
- Latif, Y.; Cadena, C.; Neira, J. Robust loop closing over time for pose graph SLAM. Int. J. Robot. Res. 2013, 32, 1611–1626. [Google Scholar] [CrossRef]
- Carlone, L.; Censi, A.; Dellaert, F. Selecting good measurements via ℓ1 relaxation: A convex approach for robust estimation over graphs. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2667–2674. [Google Scholar] [CrossRef]
- Carlone, L.; Calafiore, G.C. Convex Relaxations for Pose Graph Optimization with Outliers. IEEE Robot Autom. Let. 2018, 3, 1160–1167. [Google Scholar] [CrossRef]
- Wei, L.; Cappelle, C.; Ruichek, Y. Camera/laser/GPS fusion method for vehicle positioning under extended NIS-based sensor validation. IEEE Trans. Instrum. Meas. 2013, 62, 3110–3322. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. Visual-LiDAR odometry and mapping, low-drift, robust and fast. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Sturm, J.; Burgard, W.; Cremers, D. Evaluating Egomotion and Structure-from-Motion Approaches Using the TUM RGB-D Benchmark. In Proceedings of the IEEE/RSJ International Conference Intelligent Robots & Systems, Vilamoura, Portugal, 7–12 October 2012. [Google Scholar]
- Kummerle, R.; Steder, B.; Dornhege, C.; Ruhnke, M.; Grisetti, G.; Stachniss, C.; Kleiner, A. On measuring the accuracy of SLAM algorithms. Auton. Robot. 2009, 27, 387–407. [Google Scholar] [CrossRef]
- Sturm, J.; Engelhard, N.; Endres, F.; Burgard, W.; Cremers, D. A benchmark for the evaluation of RGB-D SLAM systems. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 573–580. [Google Scholar] [CrossRef]
- Kurlbaum, J.; Frese, U. A Benchmark Data Set for Data Association. Technical Report. University of Bremen, 2009. Available online: https://www.dfki.de/fileadmin/user_upload/import/4432_kurlbaum_tr_09.pdf (accessed on 1 October 2022).
- Li, Q.; Song, Y.; Hou, Z. Neural network based FastSLAM for autonomous robots in unknown environments. Neurocomputing 2015, 165, 99–110. [Google Scholar] [CrossRef]
- Cadena, C.; Neira, J. SLAM in O(log n) with the Combined Kalman—Information filter. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2069–2076. [Google Scholar]
- Huang, S.; Dissanayake, G. Convergence and consistency analysis for extended Kalman Filter based SLAM. IEEE Trans. Robot. 2007, 23, 1036–1049. [Google Scholar] [CrossRef]
- Bailey, T.; Nieto, J.; Guivant, J.; Stevens, M.; Nebot, E. Consistency of the EKF-SLAM Algorithm. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3562–3568. [Google Scholar] [CrossRef]
- Huang, G.P.; Mourikis, A.I.; Roumeliotis, S.I. A First-Estimates Jacobian EKF for Improving SLAM Consistency. In Experimental Robotics; Khatib, O., Kumar, V., Pappas, G.J., Eds.; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2009; Volume 54. [Google Scholar] [CrossRef]
- Graham, M.C.; How, J.P.; Gustafson, D.E. Robust incremental SLAM with consistency-checking. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 117–124. [Google Scholar] [CrossRef]
- Wang, J.; Knight, N.L. New outlier separability test and its application in GNSS positioning. J. Glob. Position. Syst. 2012, 11, 6–57. [Google Scholar] [CrossRef]
- Yang, L.; Wang, J.; Knight, N.L.; Shen, Y. Outlier separability analysis with a multiple alternative hypotheses test. J. Geodesy 2013, 87, 591–604. [Google Scholar] [CrossRef]
- Baarda, W. A Testing Procedure for Use in Geodetic Networks; New Series 2(4); Netherlands Geodetic Commission: Apeldoorn, The Netherlands, 1968. [Google Scholar]
- Li, Z.; Wang, J.; Alquarashi, M.; Chen, K.; Zheng, S. Geometric analysis of reality-based indoor 3D mapping. J. Glob. Position Sys. 2016, 14, 1. [Google Scholar] [CrossRef]
- El-Mowafy, A.; Imparato, D.; Rizos, C.; Wang, J.; Wang, K. On hypothesis testing in RAIM algorithms: Generalized likelihood ratio test, solution separation test and a possible alternative. Meas. Sci. Technol. 2019, 30, 2019. [Google Scholar] [CrossRef]
- Wang, J.; Ober, P.B. On the availability of Fault Detection and Exclusion in GNSS receiver autonomous integrity monitoring. J. Navig. 2009, 62, 251–261. [Google Scholar] [CrossRef]
- Sundvall, P.; Jensfelt, P. Fault detection for mobile robots using redundant positioning systems. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 3781–3786. [Google Scholar] [CrossRef]
- Hewitson, S.; Wang, J. Extended receiver autonomous integrity monitoring (eRAIM) for GNSS/INS integration. J. Surv. Eng. 2010, 136, 13–22. [Google Scholar] [CrossRef]
- El-Mowafy, A. On Detection of Observation Faults in the Observation and Position Domains for Positioning of Intelligent Transport Systems. J. Geod. 2019, 93, 2109–2122. [Google Scholar] [CrossRef]
- Kukko, A.; Kaijaluoto, R.; Kaartinen, H.; Lehtola, V.V.; Jaakkola, A.; Hyyppä, J. Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. ISPRS J. Photogramm. Remote Sens. 2017, 132, 199–209. [Google Scholar] [CrossRef]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Chang, L.; Niu, X.; Liu, T.; Tang, J.; Qian, C. GNSS/INS/LiDAR-SLAM Integrated Navigation System Based on Graph Optimization. Remote Sens. 2019, 11, 1009. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SLAM | Type | Advantages | Disadvantages | Typical Studies |
|---|---|---|---|---|
| EKF SLAM | Bayesian filter |
|
| [29,41,42] |
| IF SLAM | Bayesian filter |
|
| [25,43] |
| CEKF SLAM | Bayesian filter |
|
| [20,44] |
| Fast SLAM | Particle filter |
|
| [26,28,30,45] |
| Graph SLAM | Batch Least Squares optimization |
|
| [46,47,48,49,50,51] |
| iSAM2 | Incremental optimization |
|
| [37,38] |
| SLAM++ | Incremental optimization |
|
| [39,40] |
| SLAM Drift | Possible Solutions |
|---|---|
| Linearization error | |
| Sensor outliers |
|
| Dynamic objects | |
| Wrong data association |
| Trajectory Section 1 | Trajectory Section 2 | Trajectory Section 3 | ||
|---|---|---|---|---|
| Mean (m) | Method 1 | |||
| East | 0.020 | −0.036 | 0.051 | |
| North | −0.035 | 0.0031 | −0.048 | |
| Up | −0.084 | 0.140 | −0.189 | |
| Method 2 | ||||
| East | −0.0026 | 0.0358 | 0.0571 | |
| North | −0.0052 | −0.0221 | −0.0371 | |
| Up | 0.0041 | −0.0250 | −0.0228 | |
| Stdev (m) | Method 1 | |||
| East | 0.142 | 0.099 | 0.128 | |
| North | 0.162 | 0137 | 0.188 | |
| Up | 0.182 | 0.151 | 0.123 | |
| Method 2 | ||||
| East | 0.0556 | 0.0466 | 0.0503 | |
| North | 0.0605 | 0.0530 | 0.0574 | |
| Up | 0.0481 | 0.0410 | 0.0486 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, S.; Wang, J.; Rizos, C.; Ding, W.; El-Mowafy, A. Simultaneous Localization and Mapping (SLAM) for Autonomous Driving: Concept and Analysis. Remote Sens. 2023, 15, 1156. https://doi.org/10.3390/rs15041156
Zheng S, Wang J, Rizos C, Ding W, El-Mowafy A. Simultaneous Localization and Mapping (SLAM) for Autonomous Driving: Concept and Analysis. Remote Sensing. 2023; 15(4):1156. https://doi.org/10.3390/rs15041156
Chicago/Turabian StyleZheng, Shuran, Jinling Wang, Chris Rizos, Weidong Ding, and Ahmed El-Mowafy. 2023. "Simultaneous Localization and Mapping (SLAM) for Autonomous Driving: Concept and Analysis" Remote Sensing 15, no. 4: 1156. https://doi.org/10.3390/rs15041156
APA StyleZheng, S., Wang, J., Rizos, C., Ding, W., & El-Mowafy, A. (2023). Simultaneous Localization and Mapping (SLAM) for Autonomous Driving: Concept and Analysis. Remote Sensing, 15(4), 1156. https://doi.org/10.3390/rs15041156