
Recognition of Abnormal Individuals Based on Lightweight Deep Learning Using Aerial Images in Complex Forest Landscapes: A Case Study of Pine Wood Nematode

 ,
,  ,
,
Abstract
:1. Introduction
2. Identification of Abnormal Individuals: The Case of Pine Wood Nematode
2.1. Pine Wood Nematode
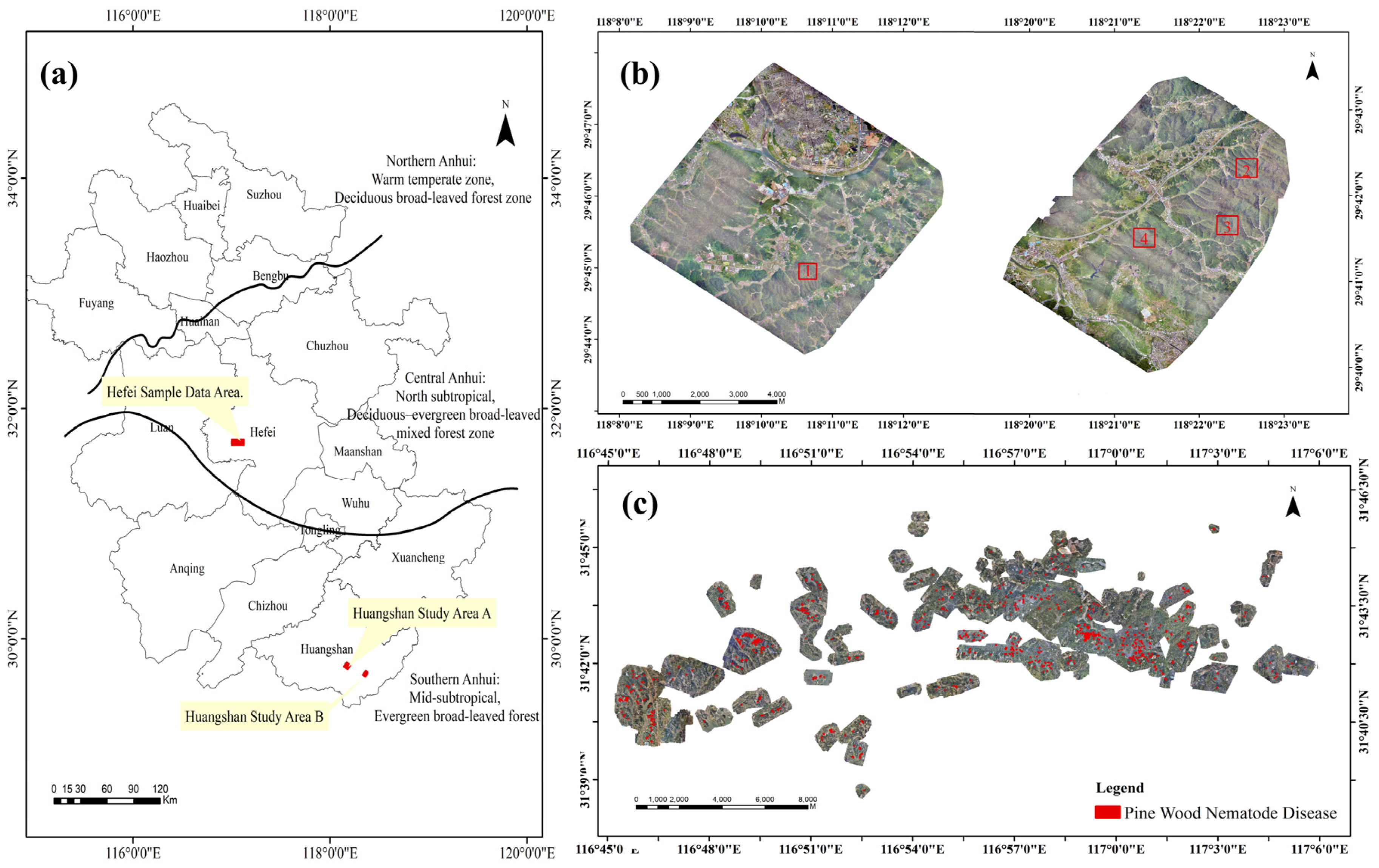
2.2. Data Area Geography and Data Collection
2.3. Dataset Details
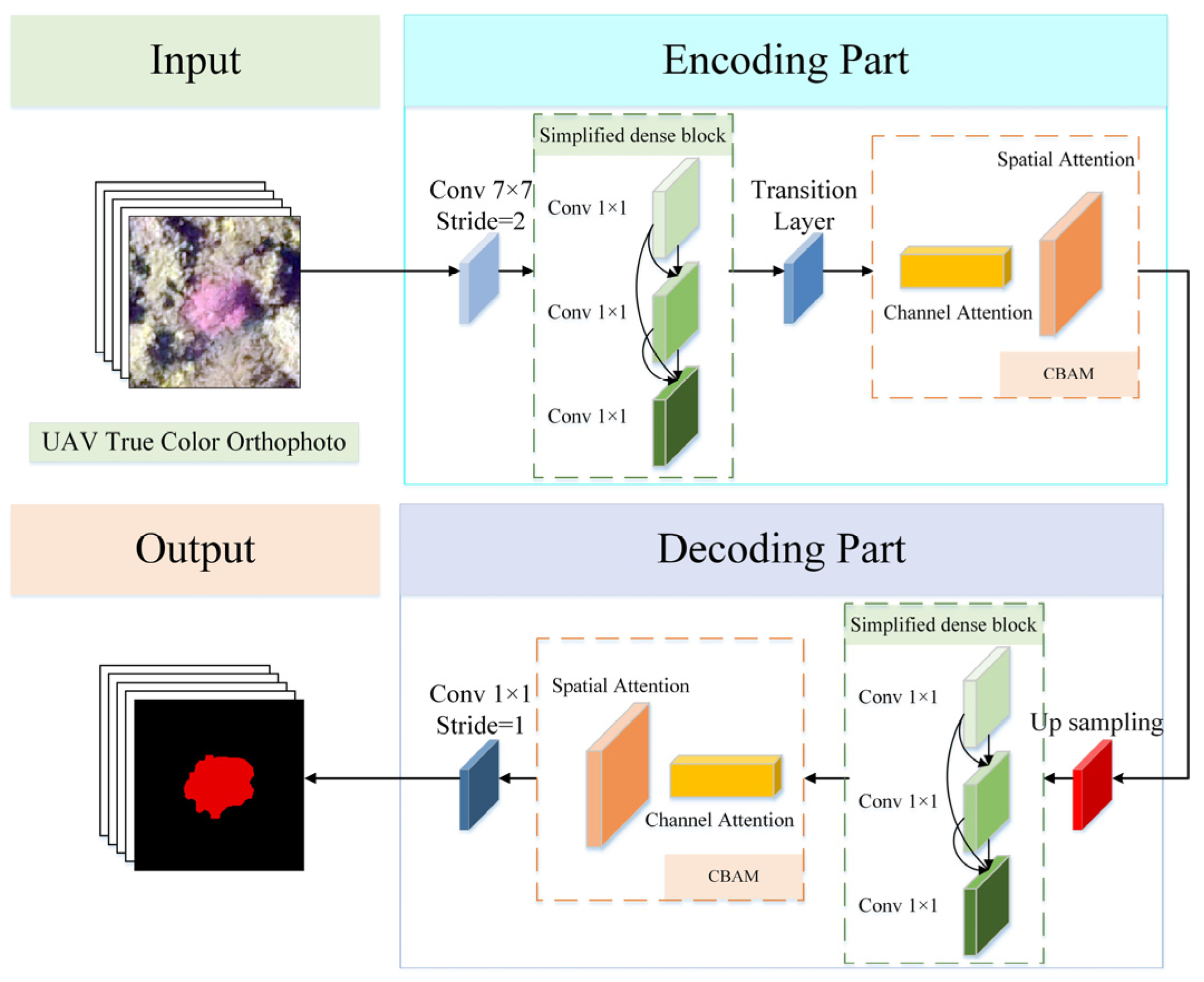
3. Methods
3.1. Simplified Dense Block
3.2. Convolutional Block Attention Module
3.2.1. Channel Attention Module
3.2.2. Spatial Attention Module
3.3. Evaluation Index
4. Results
4.1. The Identification Results
4.2. Comparison with Other Deep Learning Methods
4.2.1. Comparison with Recognition Results of Object Detection Network
4.2.2. Comparison with Recognition Results of Other Semantic Segmentation Models
4.3. Comparison of Ablation Experiments
4.4. Comparison of Network Operation Efficiency
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ellison, D.; Morris, C.E.; Locatelli, B.; Sheil, D.; Cohen, J.; Murdiyarso, D.; Gutierrez, V.; van Noordwijk, M.; Creed, I.F.; Pokorny, J.; et al. Trees, forests and water: Cool insights for a hot world. Glob. Environ. Chang. 2017, 43, 51–61. [Google Scholar] [CrossRef]
- Grossiord, C. Having the right neighbors: How tree species diversity modulates drought impacts on forests. New Phytol. 2020, 228, 42–49. [Google Scholar] [CrossRef] [Green Version]
- Xiao, J.; Chevallier, F.; Gomez, C.; Guanter, L.; Hicke, J.A.; Huete, A.R.; Ichii, K.; Ni, W.; Pang, Y.; Rahman, A.F.; et al. Remote sensing of the terrestrial carbon cycle: A review of advances over 50 years. Remote Sens. Environ. 2019, 233, 111383. [Google Scholar] [CrossRef]
- Wu, J.; Albert, L.P.; Lopes, A.P.; Restrepo-Coupe, N.; Hayek, M.; Wiedemann, K.T.; Guan, K.; Stark, S.C.; Christoffersen, B.; Prohaska, N.; et al. Leaf development and demography explain photosynthetic seasonality in Amazon evergreen forests. Science 2016, 351, 972–976. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pan, Y.; Birdsey, R.A.; Phillips, O.L.; Jackson, R.B. The Structure, Distribution, and Biomass of the World's Forests. Annu. Rev. Ecol. Evol. Syst. 2013, 44, 593–622. [Google Scholar] [CrossRef] [Green Version]
- Vieilledent, G.; Grinand, C.; Rakotomalala, F.A.; Ranaivosoa, R.; Rakotoarijaona, J.R.; Allnutt, T.F.; Achard, F. Combining global tree cover loss data with historical national forest cover maps to look at six decades of deforestation and forest fragmentation in Madagascar. Biol. Conserv. 2018, 222, 189–197. [Google Scholar] [CrossRef]
- Ramsfield, T.D.; Bentz, B.J.; Faccoli, M.; Jactel, H.; Brockerhoff, E.G. Forest health in a changing world: Effects of globalization and climate change on forest insect and pathogen impacts. Forestry 2016, 89, 245–252. [Google Scholar] [CrossRef] [Green Version]
- Feng, Z.; de Marco, A.; Anav, A.; Gualtieri, M.; Sicard, P.; Tian, H.; Fornasier, F.; Tao, F.; Guo, A.; Paoletti, E. Economic losses due to ozone impacts on human health, forest productivity and crop yield across China. Environ. Int. 2019, 131, 104966. [Google Scholar] [CrossRef]
- Poland, T.M.; Rassati, D. Improved biosecurity surveillance of non-native forest insects: A review of current methods. J. Pest Sci. 2019, 92, 37–49. [Google Scholar] [CrossRef]
- Forrester, D.I.; Tachauer, I.H.H.; Annighoefer, P.; Barbeito, I.; Pretzsch, H.; Ruiz-Peinado, R.; Stark, H.; Vacchiano, G.; Zlatanov, T.; Chakraborty, T.; et al. Generalized biomass and leaf area allometric equations for European tree species incorporating stand structure, tree age and climate. For. Ecol. Manag. 2017, 396, 160–175. [Google Scholar] [CrossRef]
- Anderegg, W.R.L.; Hicke, J.A.; Fisher, R.A.; Allen, C.D.; Aukema, J.; Bentz, B.; Hood, S.; Lichstein, J.W.; Macalady, A.K.; Mcdowell, N.; et al. Tree mortality from drought, insects, and their interactions in a changing climate. New Phytol. 2015, 208, 674–683. [Google Scholar] [CrossRef]
- Angiulli, F.; Fassetti, F.; Palopoli, L. Detecting outlying properties of exceptional objects. ACM Trans. Database Syst. 2009, 34, 1–62. [Google Scholar] [CrossRef]
- Jactel, H.; Moreira, X.; Castagneyrol, B. Tree Diversity and Forest Resistance to Insect Pests: Patterns, Mechanisms, and Prospects. Annu. Rev. Entomol. 2021, 66, 277–296. [Google Scholar] [CrossRef] [PubMed]
- Waser, L.T.; Küchler, M.; Jütte, K.; Stampfer, T. Evaluating the Potential of WorldView-2 Data to Classify Tree Species and Different Levels of Ash Mortality. Remote Sens. 2014, 6, 4515–4545. [Google Scholar] [CrossRef] [Green Version]
- Mayer, A.L.; Lopez, R.D. Use of Remote Sensing to Support Forest and Wetlands Policies in the USA. Remote Sens. 2011, 3, 1211–1233. [Google Scholar] [CrossRef] [Green Version]
- Oliver, T.H.; Heard, M.S.; Isaac, N.J.B.; Roy, D.B.; Procter, D.; Eigenbrod, F.; Freckleton, R.; Hector, A.; Orme, C.D.L.; Petchey, O.L.; et al. Biodiversity and Resilience of Ecosystem Functions. Trends Ecol. Evol. 2015, 30, 673–684. [Google Scholar] [CrossRef] [Green Version]
- Gaparovi, M.; Dobrini, D. Comparative assessment of machine learning methods for urban vegetation mapping using multitemporal Sentinel-1 imagery. Remote Sens. 2020, 12, 1952. [Google Scholar] [CrossRef]
- Wang, W.; Peng, W.; Liu, X.; He, G.; Cai, Y. Spatiotemporal Dynamics and Factors Driving the Distributions of Pine Wilt Disease-Damaged Forests in China. Forests 2022, 13, 261. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry Remote Sensing from Unmanned Aerial Vehicles: A Review Focusing on the Data, Processing and Potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Yang, R.; Cai, W.; Xue, Y.; Hu, Y.; Li, L. LLAM-MDCNet for Detecting Remote Sensing Images of Dead Tree Clusters. Remote Sens. 2022, 14, 3684. [Google Scholar] [CrossRef]
- Onishi, M.; Ise, T. Explainable identification and mapping of trees using UAV RGB image and deep learning. Sci. Rep. 2021, 11, 903. [Google Scholar] [CrossRef] [PubMed]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. Remote Sens. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Zhong, Y.; Wang, X.; Xu, Y.; Wang, S.; Jia, T.; Hu, X.; Zhao, J.; Wei, L.; Zhang, L. Mini-UAV-Borne Hyperspectral Remote Sensing: From Observation and Processing to Applications. IEEE Geosci. Remote Sens. Mag. 2018, 6, 46–62. [Google Scholar] [CrossRef]
- Jactel, H.; Brockerhoff, E.G. Tree diversity reduces herbivory by forest insects. Ecol. Lett. 2007, 10, 835–848. [Google Scholar] [CrossRef]
- Karmezi, M.; Bataka, A.; Papachristos, D.; Avtzis, D.N. Nematodes in the Pine Forests of Northern and Central Greece. Insects 2022, 13, 194. [Google Scholar] [CrossRef]
- Robinson, J.M.; Harrison, P.A.; Mavoa, S.; Breed, M.F. Existing and emerging uses of drones in restoration ecology. Methods Ecol. Evol. 2022, 13, 1899–1911. [Google Scholar] [CrossRef]
- Olegario., T.V.; Baldovino, R.G.; Bugtai, N.T. A Decision Tree-based Classification of Diseased Pine and Oak Trees Using Satellite Imagery. In Proceedings of the 2020 IEEE 12th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), Manila, Philippines, 3–7 December 2020. [Google Scholar]
- Zhang, S.; Huang, H.; Huang, Y.; Cheng, D.; Huang, J. A GA and SVM Classification Model for Pine Wilt Disease Detection Using UAV-Based Hyperspectral Imagery. Appl. Sci. 2022, 12, 6676. [Google Scholar] [CrossRef]
- Tang, C.; Uriarte, M.; Jin, H.; Morton, D.C.; Zheng, T. Large-scale, image-based tree species mapping in a tropical forest using artificial perceptual learning. Methods Ecol. Evol. 2021, 12, 608–618. [Google Scholar] [CrossRef]
- Ball, J.G.C.; Petrova, K.; Coomes, D.A.; Flaxman, S. Using deep convolutional neural networks to forecast spatial patterns of Amazonian deforestation. Methods Ecol. Evol. 2022, 13, 2622–2634. [Google Scholar] [CrossRef]
- Borowiec, M.L.; Dikow, R.B.; Frandsen, P.B.; McKeeken, A.; Valentini, G.; White, A.E. Deep learning as a tool for ecology and evolution. Methods Ecol. Evol. 2022, 13, 1640–1660. [Google Scholar] [CrossRef]
- Sun, J.; Yang, Y.; He, X.; Wu, X. Northern Maize Leaf Blight Detection Under Complex Field Environment Based on Deep Learning. IEEE Access 2020, 8, 33679–33688. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Liu, J.; Wang, X. Tomato Diseases and Pests Detection Based on Improved Yolo V3 Convolutional Neural Network. Front. Plant Sci. 2020, 11, 898. [Google Scholar] [CrossRef] [PubMed]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Stewart, E.L.; Wiesner-Hanks, T.; Kaczmar, N.; DeChant, C.; Wu, H.; Lipson, H.; Nelson, R.J.; Gore, M.A. Quantitative Phenotyping of Northern Leaf Blight in UAV Images Using Deep Learning. Remote Sens. 2019, 11, 2209. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask r-cnn[C]. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Tassis, L.M.; De Souza, J.E.T.; Krohling, R.A. A deep learning approach combining instance and semantic segmentation to identify diseases and pests of coffee leaves from in-field images. Comput. Electron. Agric. 2021, 186, 106191. [Google Scholar] [CrossRef]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid scene parsing network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2881–2890. [Google Scholar]
- Chen, C.; Jing, L.; Li, H.; Tang, Y. A New Individual Tree Species Classification Method Based on the ResU-Net Model. Forests 2021, 12, 1202. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Qin, J.; Wang, B.; Wu, Y.; Lu, Q.; Zhu, H. Identifying Pine Wood Nematode Disease Using UAV Images and Deep Learning Algorithms. Remote Sens. 2021, 13, 162. [Google Scholar] [CrossRef]
- Bhujel, A.; Kim, N.E.; Arulmozhi, E.; Basak, J.K.; Kim, H.T. A Lightweight Attention-Based Convolutional Neural Networks for Tomato Leaf Disease Classification. Agriculture 2022, 12, 228. [Google Scholar] [CrossRef]
- Jia, S.; Jiang, S.; Lin, Z.; Li, N.; Xu, M.; Yu, S. A survey: Deep learning for hyperspectral image classification with few labeled samples. Neurocomputing 2021, 448, 179–204. [Google Scholar] [CrossRef]
- Wu, W.; Zhang, Z.; Zheng, L.; Han, C.; Wang, X.; Xu, J.; Wang, X. Research Progress on the Early Monitoring of Pine Wilt Disease Using Hyperspectral Techniques. Sensors 2020, 20, 3729. [Google Scholar] [CrossRef]
- Hao, Z.; Huang, J.; Li, X.; Sun, H.; Fang, G. A multi-point aggregation trend of the outbreak of pine wilt disease in China over the past 20 years. For. Ecol. Manag. 2022, 505, 119890. [Google Scholar] [CrossRef]
- Li, M.; Li, H.; Ding, X.; Wang, L.; Wang, X.; Chen, F. The Detection of Pine Wilt Disease: A Literature Review. Int. J. Mol. Sci. 2022, 23, 10797. [Google Scholar] [CrossRef]
- Fukuda, K. Physiological Process of the Symptom Development and Resistance Mechanism in Pine Wilt Disease. J. For. Res. 1997, 2, 171–181. [Google Scholar] [CrossRef]
- Li, N.; Huo, L.; Zhang, X. Classification of pine wilt disease at different infection stages by diagnostic hyperspectral bands. Ecol. Indic. 2022, 142, 109198. [Google Scholar] [CrossRef]
- Wu, D.; He, Y.; Nie, P.; Cao, F.; Bao, Y. Hybrid variable selection in visible and near-infrared spectral analysis for non-invasive quality determination of grape juice. Anal. Chim. Acta 2010, 659, 229–237. [Google Scholar] [CrossRef] [PubMed]
- Choi, W.I.; Song, H.J.; Kim, D.S.; Lee, D.S.; Lee, C.Y.; Nam, Y.; Kim, J.B.; Park, Y.S. Dispersal Patterns of Pine Wilt Disease in the Early Stage of Its Invasion in South Korea. Forests 2017, 8, 411. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Jiao, W.; Wang, L.N.; Zhong, G. Automatic DenseNet Sparsification. IEEE Access 2020, 8, 62561–62571. [Google Scholar] [CrossRef]
- Chen, J.; Wan, L.; Zhu, J.; Xu, G.; Deng, M. Multi-Scale Spatial and Channel-wise Attention for Improving Object Detection in Remote Sensing Imagery. IEEE Geosci. Remote Sens. Lett. 2020, 17, 681–685. [Google Scholar] [CrossRef]
- Zhou, T.; Ye, X.; Lu, H.; Zheng, X.; Qiu, S.; Liu, Y. Dense Convolutional Network and Its Application in Medical Image Analysis. BioMed Res. Int. 2022, 2022, 1–22. [Google Scholar] [CrossRef] [PubMed]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8 September 2018; pp. 3–19. [Google Scholar]
- Young, D.J.N.; Koontz, M.J.; Weeks, J. Optimizing aerial imagery collection and processing parameters for drone-based individual tree mapping in structurally complex conifer forests. Methods Ecol. Evol. 2022, 13, 1447–1463. [Google Scholar] [CrossRef]
- Tabak, M.A.; Norouzzadeh, M.S.; Wolfson, D.W.; Sweeney, S.J.; Vercauteren, K.C.; Snow, N.P.; Halseth, J.M.; di Salvo, P.A.; Lewis, J.S.; White, M.D.; et al. Machine learning to classify animal species in camera trap images: Applications in ecology. Methods Ecol. Evol. 2019, 10, 585–590. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Images | Hefei Sample Data Area | Huangshan Study Area A | Huangshan Study Area B |
|---|---|---|---|
| Flight altitude | 414 m | 1060 m | 1060 m |
| Spatial resolution | 0.04 m | 0.09 m | 0.09 m |
| Flight time | 2021-09-28 | 2022-02-01 | 2022-02-01 |
| Number of photos | 8962 | 614 | 347 |
| Center coordinates | E116°56′50″ N31°45′8″ | E118°10′1″ N29°44′53″ | E118°22′1″ N29°41′56″ |
| Number of spectral channels | Blue: 475 nm Green: 560 nm Red: 670 nm | ||
| Images | ||||
|---|---|---|---|---|
| Typical features of pine wood nematode |  |  |  |  |
| Other typical features |  |  |  |  |
| Test Area | Total Visual Interpretation | Total Number of Identifications | Correct Number | Overall Accuracy | F1 | Precision | Recall | Missing Alarm |
|---|---|---|---|---|---|---|---|---|
| 1 | 139 | 177 | 124 | 64.58% | 0.78 | 0.70 | 0.89 | 0.11 |
| 2 | 269 | 309 | 255 | 78.95% | 0.88 | 0.83 | 0.94 | 0.06 |
| 3 | 144 | 163 | 139 | 82.73% | 0.90 | 0.85 | 0.96 | 0.04 |
| 4 | 203 | 246 | 196 | 77.47% | 0.88 | 0.80 | 0.97 | 0.03 |
| Test Area | Total Visual Interpretation | Total Number of Identifications | Correct Number | Overall Accuracy | F1 | Precision | Recall | Missing Alarm |
|---|---|---|---|---|---|---|---|---|
| 1 | 139 | 51 | 43 | 29.25% | 0.45 | 0.84 | 0.31 | 0.69 |
| 2 | 269 | 103 | 91 | 32.38% | 0.49 | 0.88 | 0.34 | 0.66 |
| 3 | 144 | 45 | 44 | 30.34% | 0.47 | 0.98 | 0.31 | 0.69 |
| 4 | 203 | 79 | 76 | 36.89% | 0.53 | 0.96 | 0.37 | 0.63 |
| Test Area | Models | Total Visual Interpretation | Total Number of Identifications | Correct Number | Overall Accuracy | F1 | Precision | Recall | Missing Alarm |
|---|---|---|---|---|---|---|---|---|---|
| 1 | D-SCNet | 139 | 177 | 124 | 64.58% | 0.78 | 0.70 | 0.89 | 0.11 |
| SCANet | 139 | 60 | 51 | 34.46% | 0.52 | 0.85 | 0.37 | 0.63 | |
| U-Net | 139 | 693 | 135 | 19.37% | 0.32 | 0.19 | 0.97 | 0.03 | |
| PSPNet | 139 | 17 | 16 | 11.43% | 0.21 | 0.94 | 0.12 | 0.88 | |
| 2 | D-SCNet | 269 | 309 | 255 | 78.95% | 0.88 | 0.83 | 0.94 | 0.06 |
| SCANet | 269 | 97 | 90 | 32.61% | 0.49 | 0.93 | 0.33 | 0.67 | |
| U-Net | 269 | 605 | 256 | 41.42% | 0.58 | 0.42 | 0.95 | 0.05 | |
| PSPNet | 269 | 61 | 58 | 21.32% | 0.36 | 0.95 | 0.22 | 0.78 | |
| 3 | D-SCNet | 144 | 163 | 139 | 82.73% | 0.90 | 0.85 | 0.96 | 0.04 |
| SCANet | 144 | 55 | 54 | 37.24% | 0.55 | 0.98 | 0.38 | 0.63 | |
| U-Net | 144 | 471 | 141 | 29.75% | 0.46 | 0.30 | 0.98 | 0.02 | |
| PSPNet | 144 | 29 | 28 | 19.31% | 0.32 | 0.97 | 0.19 | 0.81 | |
| 4 | D-SCNet | 203 | 246 | 196 | 77.47% | 0.88 | 0.80 | 0.97 | 0.03 |
| SCANet | 203 | 69 | 66 | 32.04% | 0.49 | 0.96 | 0.33 | 0.67 | |
| U-Net | 203 | 639 | 198 | 30.74% | 0.47 | 0.31 | 0.98 | 0.02 | |
| PSPNet | 203 | 38 | 37 | 18.13% | 0.30 | 0.97 | 0.18 | 0.82 |
| Test Area | Models | Total Visual Interpretation | Total Number of Identifications | Correct Number | Overall Accuracy | F1 | Precision | Recall | Missing Alarm |
|---|---|---|---|---|---|---|---|---|---|
| 1 | D-SCNet | 139 | 177 | 124 | 64.58% | 0.78 | 0.70 | 0.89 | 0.11 |
| No-c | 139 | 91 | 75 | 48.39% | 0.65 | 0.82 | 0.54 | 0.46 | |
| No-s | 139 | 232 | 129 | 55.31% | 0.69 | 0.55 | 0.93 | 0.07 | |
| No-cbam | 139 | 191 | 120 | 57.14% | 0.73 | 0.63 | 0.86 | 0.14 | |
| 2 | D-SCNet | 269 | 309 | 255 | 78.95% | 0.88 | 0.83 | 0.94 | 0.06 |
| No-c | 269 | 155 | 137 | 47.74% | 0.65 | 0.88 | 0.51 | 0.49 | |
| No-s | 269 | 452 | 256 | 55.05% | 0.71 | 0.57 | 0.95 | 0.05 | |
| No-cbam | 269 | 325 | 232 | 66.85% | 0.80 | 0.73 | 0.88 | 0.12 | |
| 3 | D-SCNet | 144 | 163 | 139 | 82.73% | 0.90 | 0.85 | 0.96 | 0.04 |
| No-c | 144 | 85 | 82 | 55.78% | 0.72 | 0.96 | 0.57 | 0.43 | |
| No-s | 144 | 240 | 136 | 54.84% | 0.71 | 0.57 | 0.94 | 0.06 | |
| No-cbam | 144 | 142 | 115 | 63.54% | 0.78 | 0.76 | 0.80 | 0.20 | |
| 4 | D-SCNet | 203 | 246 | 196 | 77.47% | 0.88 | 0.80 | 0.97 | 0.03 |
| No-c | 203 | 152 | 146 | 69.86% | 0.82 | 0.96 | 0.72 | 0.28 | |
| No-s | 203 | 327 | 187 | 54.52% | 0.70 | 0.57 | 0.92 | 0.08 | |
| No-cbam | 203 | 253 | 171 | 60.00% | 0.75 | 0.68 | 0.84 | 0.16 |
| Models | Test Image Space Usage/M | Image Resolution | Parameters/M | FLOPs/M | Training Time/min | Test Time/min | Computer Configuration |
|---|---|---|---|---|---|---|---|
| D-SCNet | 167 | 0.09 m | 3.93 | 183.13 | 42 | 4 | All models run on Windows 10 64-bit operating system. The hardware configuration is Inter Core (TM) i9-10900F CPU and NVIDIA GeForce RTX 2070 SUPER graphics card and 64 GB of memory. |
| U-Net | 3.36 | 189.90 | 74 | 1 | |||
| PSPNet | 2.90 | 177.3 | 30 | 5 | |||
| YOLOv5 | 52 | 1300 | 1200 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Wang, B.; Chen, W.; Wu, Y.; Qin, J.; Chen, P.; Sun, H.; He, A. Recognition of Abnormal Individuals Based on Lightweight Deep Learning Using Aerial Images in Complex Forest Landscapes: A Case Study of Pine Wood Nematode. Remote Sens. 2023, 15, 1181. https://doi.org/10.3390/rs15051181
Zhang Z, Wang B, Chen W, Wu Y, Qin J, Chen P, Sun H, He A. Recognition of Abnormal Individuals Based on Lightweight Deep Learning Using Aerial Images in Complex Forest Landscapes: A Case Study of Pine Wood Nematode. Remote Sensing. 2023; 15(5):1181. https://doi.org/10.3390/rs15051181
Chicago/Turabian StyleZhang, Zuyi, Biao Wang, Wenwen Chen, Yanlan Wu, Jun Qin, Peng Chen, Hanlu Sun, and Ao He. 2023. "Recognition of Abnormal Individuals Based on Lightweight Deep Learning Using Aerial Images in Complex Forest Landscapes: A Case Study of Pine Wood Nematode" Remote Sensing 15, no. 5: 1181. https://doi.org/10.3390/rs15051181