
An Algorithm to Retrieve Precipitable Water Vapor from Sentinel-2 Data

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
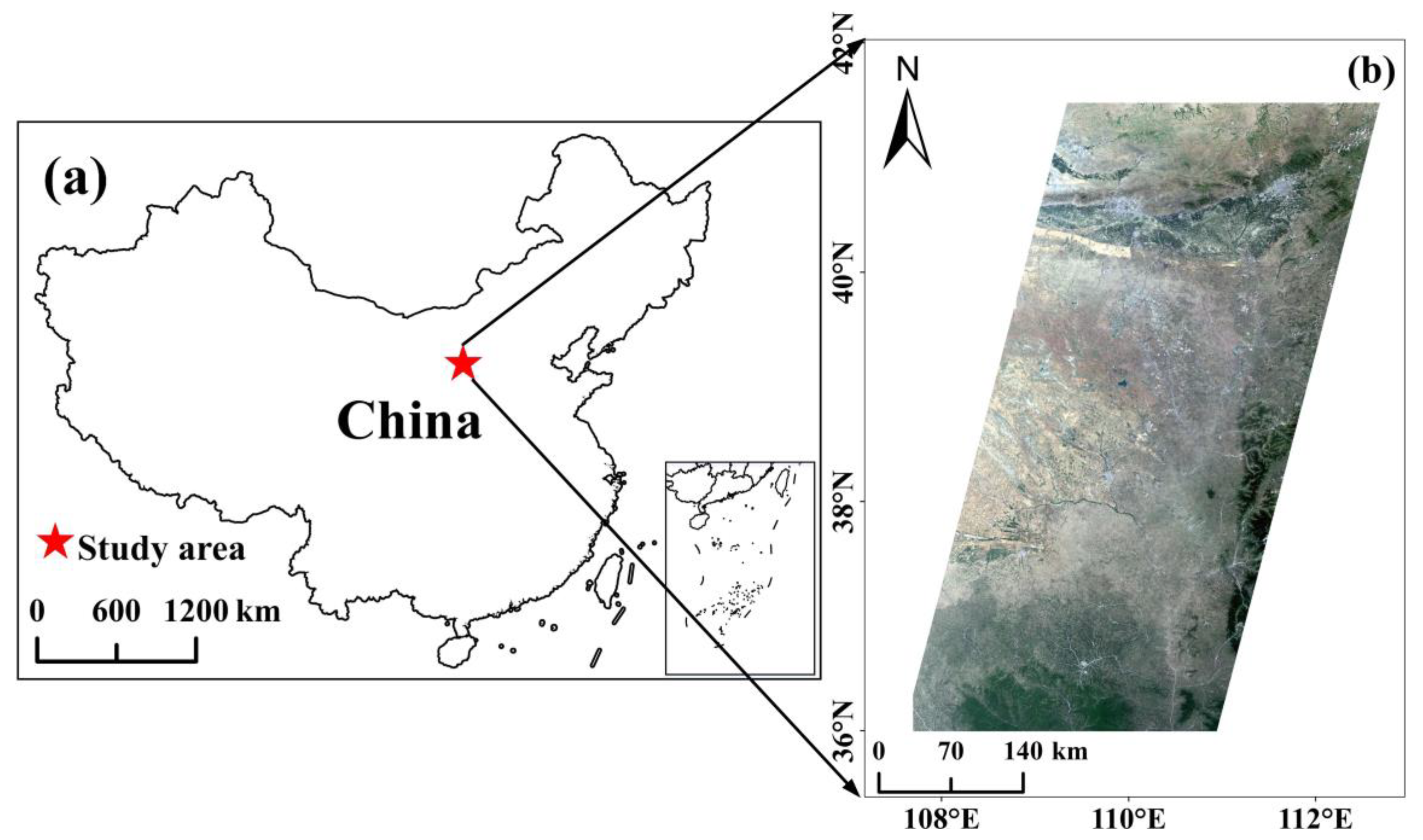
2.1. Study Area
2.2. Sentinel-2 Data and Preprocessing
2.3. Theoretical Basis of PWV Inversion
2.4. PWV Inversion Model Design
2.5. Retrieval Algorithm Validation
3. Results
3.1. Validation of Various PWV Products
3.1.1. PWV Comparison of S2-L2A, MOD05, and ESA-L2A with GPS
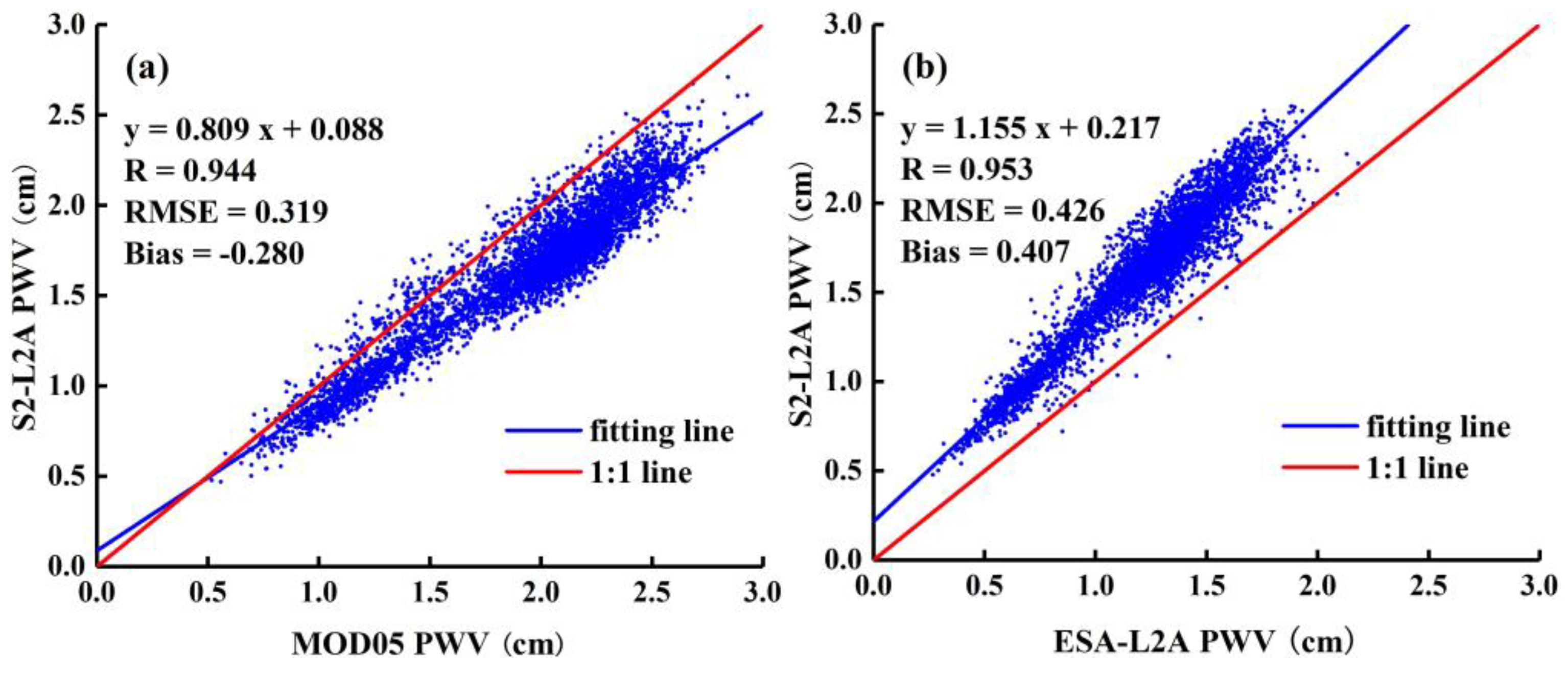
3.1.2. PWV Comparison of MOD05, ESA-L2A with S2-L2A
3.2. Validation of Time Series S2-L2A PWV
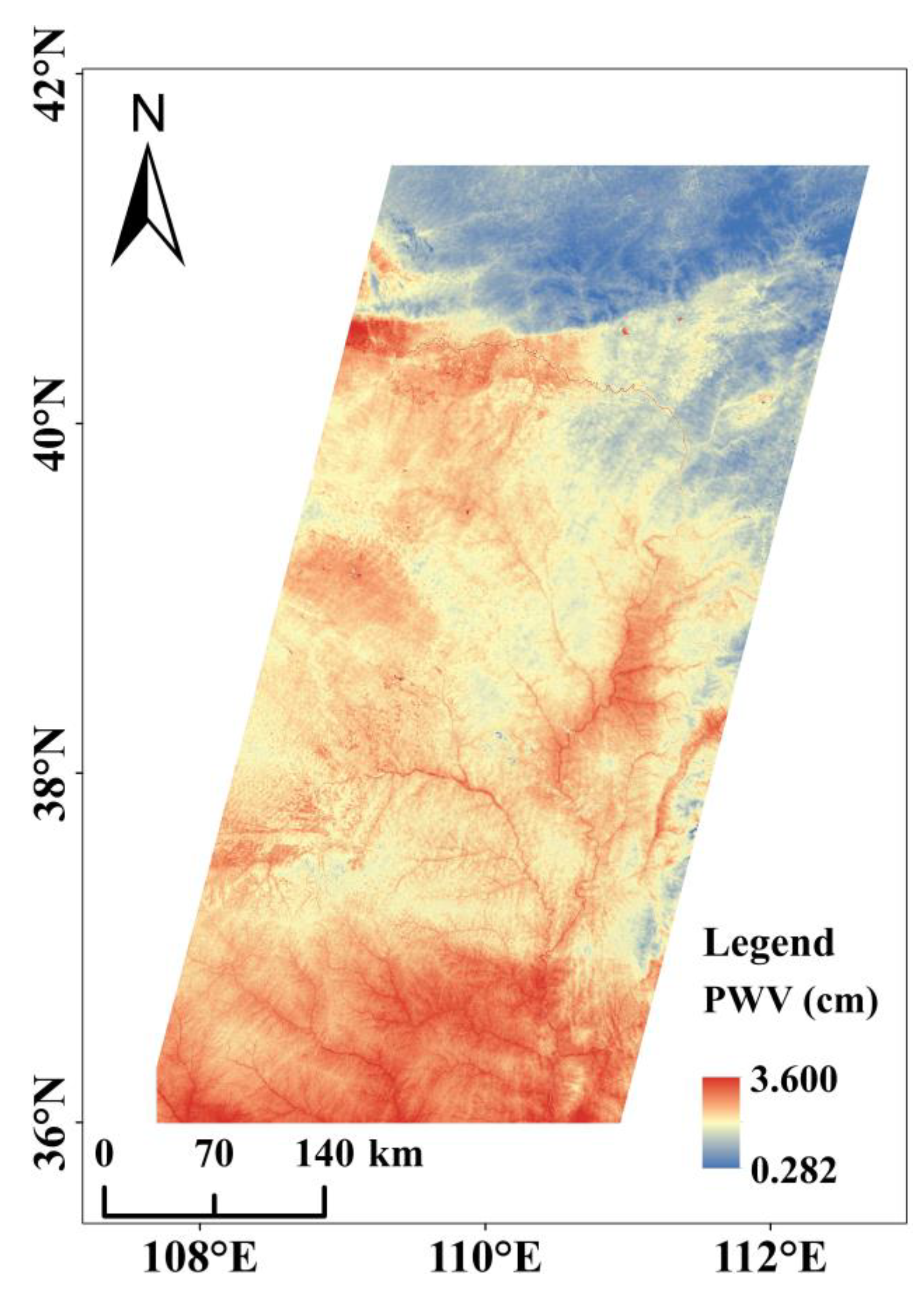
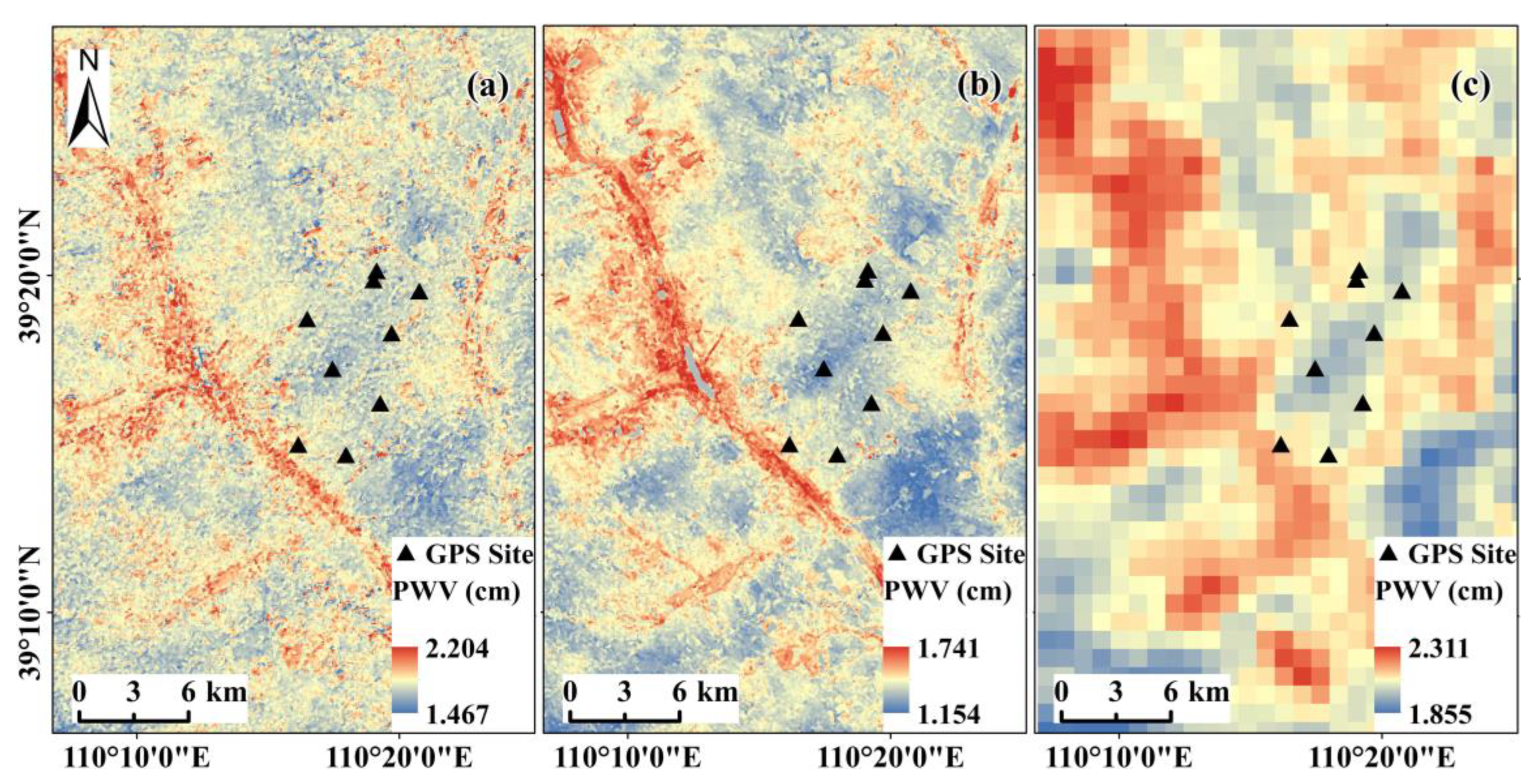
3.3. Spatial Distribution of S2-L2APWV
4. Discussion
4.1. Advantages of the Algorithm
4.2. Error Analysis of the Algorithm
4.3. The Transferability of the Proposed Method
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Solomon, S.; Rosenlof, K.H.; Portmann, R.W.; Daniel, J.S.; Davis, S.M.; Sanford, T.J.; Plattner, G. Contributions of stratospheric water vapor to decadal changes in the rate of global warming. Science 2010, 327, 1219–1223. [Google Scholar] [CrossRef] [Green Version]
- Lovell-Smith, J.W.; Feistel, R.; Harvey, A.H.; Hellmuth, O.; Bell, S.A.; Heinonen, M.; Cooper, J.R. Metrological challenges for measurements of key climatological observables. Part 4: Atmospheric relative humidity. Metrologia 2015, 53, R40. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Cao, X.; Quan, J.; Wang, T.; Liang, J.; Shi, J. Retrieval of precipitable water vapor using MFRSR and comparison with other multisensors over the semi-arid area of northwest China. Atmos. Res 2016, 172, 83–94. [Google Scholar] [CrossRef]
- Held, I.M.; Soden, B.J. Water vapor feedback and global warming. Annu. Rev. Energy Environ. 2000, 25, 441–475. [Google Scholar] [CrossRef] [Green Version]
- Trenberth, K.E.; Fasullo, J.; Smith, L. Trends and variability in column-integrated atmospheric water vapor. Clim. Dyn 2005, 24, 741–758. [Google Scholar] [CrossRef]
- Karl, T.R.; Trenberth, K.E. Modern global climate change. Science 2003, 302, 1719–1723. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Liu, Z. Comparison of satellite-derived precipitable water vapor through near-infrared remote sensing channels. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10252–10262. [Google Scholar] [CrossRef]
- Yang, L.; Kong, J.; Wang, Y.; Li, J.; Zhang, W. Research on remote sensing retrieval of atmospheric water vapor content in arid region. Sci. Surv. Mapp. 2020, 45, 95–100. [Google Scholar]
- Pérez Ramírez, D.; Whiteman, D.N.; Smirnov, A.; Lyamani, H.; Holben, B.N.; Pinker, R.; Andrade, M.; Alados Arboledas, L. Evaluation of AERONET precipitable water vapor versus microwave radiometry, GPS, and radiosondes at ARM sites. J. Geophys. Res. Atmos. 2014, 119, 9596–9613. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Dai, A.; Mears, C. Global water vapor trend from 1988 to 2011 and its diurnal asymmetry based on GPS, radiosonde, and microwave satellite measurements. J. Clim 2016, 29, 5205–5222. [Google Scholar] [CrossRef]
- Park, C.; Roh, K.; Cho, J. Radiosonde sensors bias in precipitable water vapor from comparisons with global positioning system measurements. J. Astron. Space Sci. 2012, 29, 295–303. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Liu, Y.; Li, J.; Liu, L. The Correlation Between the Variation of PM2.5/PM10 and Precipitable Water Vapor Based on GPS and Radiosonde. Geomat. Inf. Sci. Wuhan Univ. 2016, 41, 1626–1631. [Google Scholar]
- Liu, H.; Tang, S.; Zhang, S.; Hu, J. Evaluation of MODIS water vapour products over China using radiosonde data. Int. J. Remote Sens. 2015, 36, 680–690. [Google Scholar] [CrossRef]
- Ccoica-López, K.L.; Pasapera-Gonzales, J.J.; Jimenez, J.C. Spatio-temporal variability of the precipitable water vapor over Peru through MODIS and ERA-Interim time series. Atmosphere 2019, 10, 192. [Google Scholar] [CrossRef] [Green Version]
- Bevis, M.; Businger, S.; Chiswell, S.; Herring, T.A.; Anthes, R.A.; Rocken, C.; Ware, R.H. GPS meteorology: Mapping zenith wet delays onto precipitable water. J. Appl. Meteorol. (1988–2005) 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Xu, J.; Liu, Z. A Linear Regression of Differential PWV Calibration Model to Improve the Accuracy of MODIS NIR All-Weather PWV Products Based on Ground-Based GPS PWV Data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens 2022, 15, 7929–7951. [Google Scholar] [CrossRef]
- Niell, A.E.; Coster, A.J.; Solheim, F.S.; Mendes, V.B.; Toor, P.C.; Langley, R.B.; Upham, C.A. Comparison of measurements of atmospheric wet delay by radiosonde, water vapor radiometer, GPS, and VLBI. J. Atmos. Ocean. Technol. 2001, 18, 830–850. [Google Scholar] [CrossRef]
- Li, C.; Huang, Q.; Qin, Z. Comparison of Water Vapor Content Product Retrieved by CE-318 Sun-photometer, Radiosonde Data and MODIS Near Infrared Data. J. Geo-Inf. Sci. 2017, 19, 994–1000. [Google Scholar]
- Gong, S. Evaluation of maritime aerosol optical depth and precipitable water vapor content from the Microtops II Sun photometer. Optik 2018, 169, 1–7. [Google Scholar] [CrossRef]
- Torres, B.; Cachorro, V.E.; Toledano, C.; Ortiz De Galisteo, J.P.; Berjón, A.; De Frutos, A.M.; Bennouna, Y.; Laulainen, N. Precipitable water vapor characterization in the Gulf of Cadiz region (southwestern Spain) based on Sun photometer, GPS, and radiosonde data. J. Geophys. Res. Atmos. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Xu, Q.; Li, X.; Li, C.; Hu, H. Retrieval of Atmospherical Aerosol Optical Depths and Precipitable Water from Ground-based Extinction Measurements in Beijing Area. Chin. J. Process Eng. 2006, 6, 20–24. [Google Scholar]
- Bennartz, R.; Fischer, J. Retrieval of columnar water vapour over land from backscattered solar radiation using the Medium Resolution Imaging Spectrometer. Remote Sens. Environ. 2001, 78, 274–283. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, D.; Su, X.; Yang, J.; Ma, Y. Retrieving precipitable water vapor based on FY-3A near-IR data. J. Infrared Millim. Waves 2012, 31, 550–555. [Google Scholar] [CrossRef]
- Gao, B.; Kaufman, Y.J. Water vapor retrievals using Moderate Resolution Imaging Spectroradiometer (MODIS) near-infrared channels. J. Geophys. Res. Atmos. 2003, 108, 4389. [Google Scholar] [CrossRef]
- Liu, H.; Tang, S.; Hu, J.; Zhang, S.; Deng, X. An improved physical split-window algorithm for precipitable water vapor retrieval exploiting the water vapor channel observations. Remote Sens. Environ. 2017, 194, 366–378. [Google Scholar] [CrossRef]
- Moradizadeh, M.; Momeni, M.; Saradjian, M.R. Estimation and validation of atmospheric water vapor content using a MODIS NIR band ratio technique based on AIRS water vapor products. Arab. J. Geosci. 2014, 7, 1891–1897. [Google Scholar] [CrossRef]
- Li, X.; Long, D. An improvement in accuracy and spatiotemporal continuity of the MODIS precipitable water vapor product based on a data fusion approach. Remote Sens. Environ. 2020, 248, 111966. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Gao, B. Remote sensing of water vapor in the near IR from EOS/MODIS. IEEE Trans. Geosci. Remote Sens. 1992, 30, 871–884. [Google Scholar] [CrossRef]
- He, J.; Liu, Z. Water vapor retrieval from MODIS NIR channels using ground-based GPS data. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3726–3737. [Google Scholar] [CrossRef]
- Hu, J.; Tang, S.; Liu, H.; Zheng, J. Production and validation of FY-3C VIRR total precipitable water products. J. Remote Sens. 2017, 21, 842–852. [Google Scholar]
- Shi, F.; Xin, J.; Yang, L.; Cong, Z.; Liu, R.; Ma, Y.; Wang, Y.; Lu, X.; Zhao, L. The first validation of the precipitable water vapor of multisensor satellites over the typical regions in China. Remote Sens. Environ. 2018, 206, 107–122. [Google Scholar] [CrossRef]
- Zhao, Q.; Du, Z.; Yao, W.; Yao, Y. The MERSI/FY-3A PWV correction method based on GNSS. Acta Geod. Cartogr. Sin. 2022, 51, 159–168. [Google Scholar]
- He, J.; Liu, Z. Water vapor retrieval from MERSI NIR channels of Fengyun-3B satellite using ground-based GPS data. Remote Sens. Environ. 2021, 258, 112384. [Google Scholar] [CrossRef]
- Bennouna, Y.S.; Torres, B.; Cachorro, V.E.; Ortiz De Galisteo, J.P.; Toledano, C. The evaluation of the integrated water vapour annual cycle over the Iberian Peninsula from EOS-MODIS against different ground-based techniques. Q. J. R. Meteorol. Soc 2013, 139, 1935–1956. [Google Scholar] [CrossRef]
- Khaniani, A.S.; Nikraftar, Z.; Zakeri, S. Evaluation of MODIS Near-IR water vapor product over Iran using ground-based GPS measurements. Atmos. Res. 2020, 231, 104657. [Google Scholar] [CrossRef]
- Abbasi, B.; Qin, Z.; Du, W.; Fan, J.; Zhao, C.; Hang, Q.; Zhao, S.; Li, S. An Algorithm to Retrieve Total Precipitable Water Vapor in the Atmosphere from FengYun 3D Medium Resolution Spectral Imager 2 (FY-3D MERSI-2) Data. Remote Sens. 2020, 12, 3469. [Google Scholar] [CrossRef]
- Liu, T.; Zhao, Z.; Shi, T. An Extraction Method of Plastic Greenhouse Based on Sentinel-2. Agric. Eng. 2021, 11, 91–98. [Google Scholar]
- Djamai, N.; Fernandes, R. Comparison of SNAP-derived Sentinel-2A L2A product to ESA product over Europe. Remote Sens. 2018, 10, 926. [Google Scholar] [CrossRef] [Green Version]
- Obregón, M.Á.; Rodrigues, G.; Costa, M.J.; Potes, M.; Silva, A.M. Validation of ESA Sentinel-2 L2A aerosol optical thickness and columnar water vapour during 2017–2018. Remote Sens. 2019, 11, 1649. [Google Scholar] [CrossRef] [Green Version]
- Makarau, A.; Richter, R.; Schläpfer, D.; Reinartz, P. APDA water vapor retrieval validation for Sentinel-2 imagery. IEEE Geosci. Remote Sens. Lett. 2016, 14, 227–231. [Google Scholar] [CrossRef]
- Zhang, T.; Wei, J.; Gan, J.; Zhu, Q.; Yang, D. Precipitable Water Vapor Retrieval with MODIS Near Infrared Data. Spectrosc. Spectr. Anal. 2016, 36, 2378–2383. [Google Scholar]
- Gao, B.; Kaufman, Y.J. The MODIS Near-IR Water Vapor Algorithm: Product ID: MOD05-Total Precipitable Water; Algorithm Technical Background Document, Remote Sensing Division, Code 7212; Naval Research Laboratory: Washington, DC, USA, 1998. [Google Scholar]
- Zhang, J.; Yu, X.; Lv, H.; Zhu, J. Analysis of Atmospheric Precipitable Water Vapor over Wuhan Based on MODIS Data in Recent Ten Years. Acta Photonica Sin. 2014, 43, 108–113. [Google Scholar]
- Zhang, W.; Zhang, S.; Zheng, N.; Ding, N.; Liu, X.; Ma, P. Tightly coupled water vapor tomography algorithm for combining GNSS and MODIS signals. Acta Geod. Cartogr. Sin. 2021, 50, 496–508. [Google Scholar]
- Cheng, H.; Liang, F.; Li, S.; Lin, Y. Spatial clustering analysis of atmospheric precipitable water in the Tianshan Mountains. Remote Sens. Nat. Resour. 2017, 29, 116–121. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Instruction |
|---|---|---|
| MODEL | 2, 3 | Mid-Latitude Summer (MLS), Mid-Latitude Winter (MLW) |
| ITYPE | 2 | Vertical path between two altitudes |
| IEMSCT | 2 | Radiance/scattering model |
| TPTEMP | 298.15 | Temperature (Kelvins) |
| IMULT | 1 | Multiple scattering |
| VISIBILITY | 10–200, step 20 | Visibility (km), corresponding to an aerosol optical thickness of 0.70–0.05 at 550 nm |
| CSALB | 1, 2, 3, 4, 7 | spectral albedo curve (snow cover, forest, farm, desert, old grass) |
| H2OSTR | 0.2–5.0, step 0.2 | Defined column water vapor value (g/cm2) |
| LLFLTNM | Sentinel2.flt | Spectral response function of Sentinel-2 |
| IHAZE | 1 | RURAL extinction, default VIS = 23 km |
| H1 | 786 | Sensor Altitude (km) |
| H2 | 0–3.0, step 0.5 | Ground Elevation (km) |
| ANGLE | 164–180, step 4 | Sensor zenith angle (°) |
| PARM1 | 0–180, step 30 | Relative azimuth angle (°) |
| PARM2 | 20–60, step 10 | Solar zenith angle (°) |
| PWV | R | RMSE (cm) | Bias (cm) |
|---|---|---|---|
| S2-L2A | 0.929 | 0.114 | −0.005 |
| MOD05 | 0.947 | 0.343 | 0.292 |
| ESA-L2A | 0.908 | 0.346 | −0.319 |
| PWV | Maximum | Minimum | Mean | Standard Deviation |
|---|---|---|---|---|
| S2-L2A | 3.600 | 0.282 | 1.649 | 0.391 |
| MOD05 | 3.549 | 0.484 | 1.931 | 0.450 |
| ESA-L2A | 3.005 | 0.161 | 1.231 | 0.314 |
| Level | AOT | Sensor Zenith Angle (°) | Solar Zenith Angle (°) | Elevation (m) | NDVI |
|---|---|---|---|---|---|
| 1 | 0.050–0.064 | 167.822–169.327 | 23.062–23.979 | 391–912 | 0–0.173 |
| 2 | 0.064–0.079 | 169.327–170.580 | 23.979–24.569 | 912–1074 | 0.173–0.249 |
| 3 | 0.079–0.099 | 170.580–171.875 | 24.569–25.118 | 1074–1200 | 0.249–0.325 |
| 4 | 0.099–0.115 | 171.875–173.253 | 25.118–25.647 | 1200–1316 | 0.325–0.412 |
| 5 | 0.115–0.133 | 173.253–174.631 | 25.647–26.177 | 1316–1439 | 0.412–0.505 |
| 6 | 0.133–0.151 | 174.631–176.010 | 26.177–26.726 | 1439–1583 | 0.505–0.602 |
| 7 | 0.151–0.160 | 176.010–177.346 | 26.726–27.316 | 1583–1780 | 0.602–0.703 |
| 8 | 0.160–0.183 | 177.346–178.516 | 27.316–28.273 | 1780–2807 | 0.703–0.884 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Lei, S.; Zhu, G.; Shi, Y.; Wang, C.; Li, Y.; Su, Z.; Wang, W. An Algorithm to Retrieve Precipitable Water Vapor from Sentinel-2 Data. Remote Sens. 2023, 15, 1201. https://doi.org/10.3390/rs15051201
Zhao Y, Lei S, Zhu G, Shi Y, Wang C, Li Y, Su Z, Wang W. An Algorithm to Retrieve Precipitable Water Vapor from Sentinel-2 Data. Remote Sensing. 2023; 15(5):1201. https://doi.org/10.3390/rs15051201
Chicago/Turabian StyleZhao, Yibo, Shaogang Lei, Guoqing Zhu, Yunxi Shi, Cangjiao Wang, Yuanyuan Li, Zhaorui Su, and Weizhong Wang. 2023. "An Algorithm to Retrieve Precipitable Water Vapor from Sentinel-2 Data" Remote Sensing 15, no. 5: 1201. https://doi.org/10.3390/rs15051201