
A Random Forest-Based Multi-Index Classification (RaFMIC) Approach to Mapping Three-Decadal Inundation Dynamics in Dryland Wetlands Using Google Earth Engine




Abstract
:1. Introduction
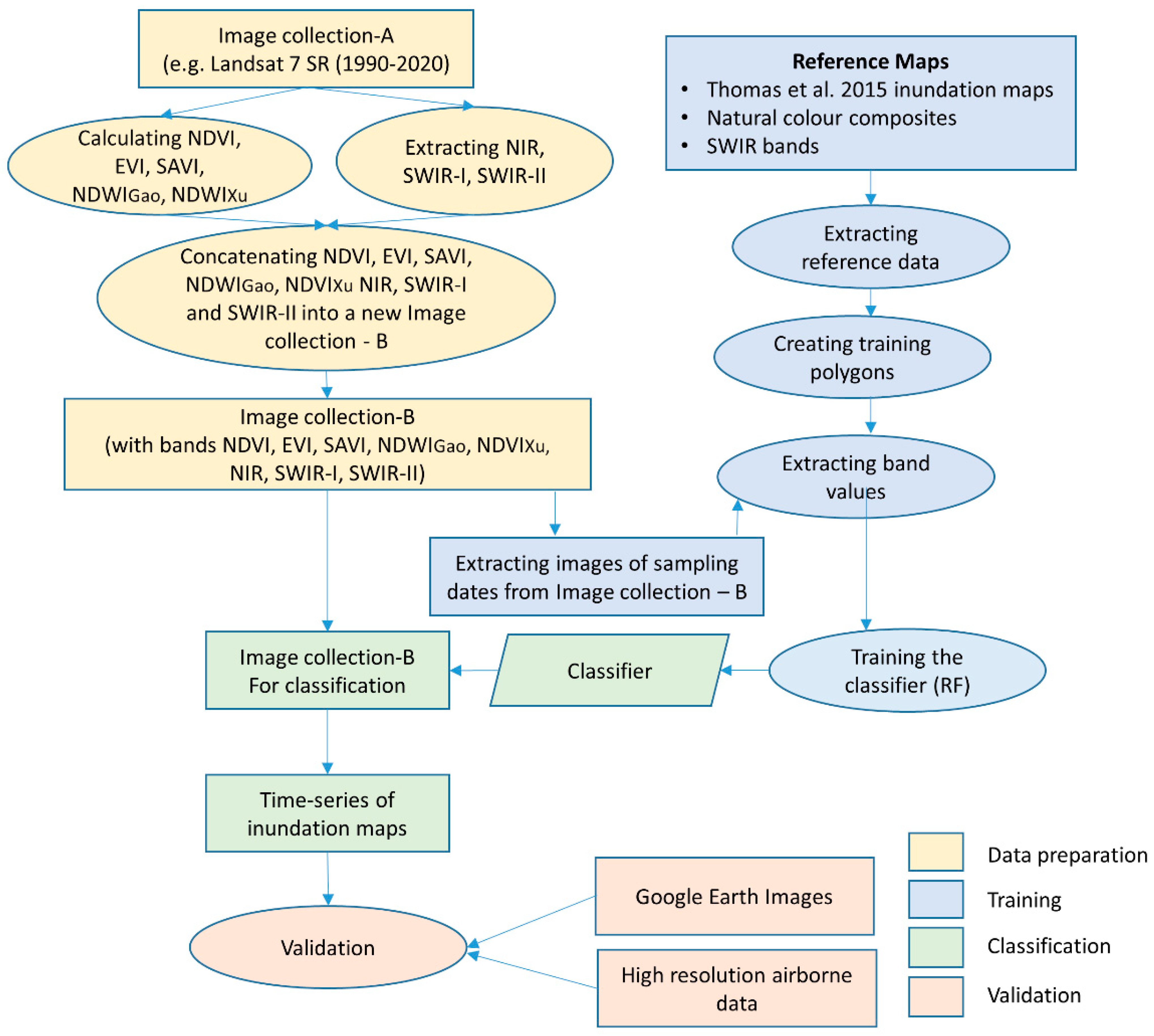
2. Overview of the Methodology
2.1. Multi-Index Approach Data Preparation
2.2. Image Classification
3. Case Study
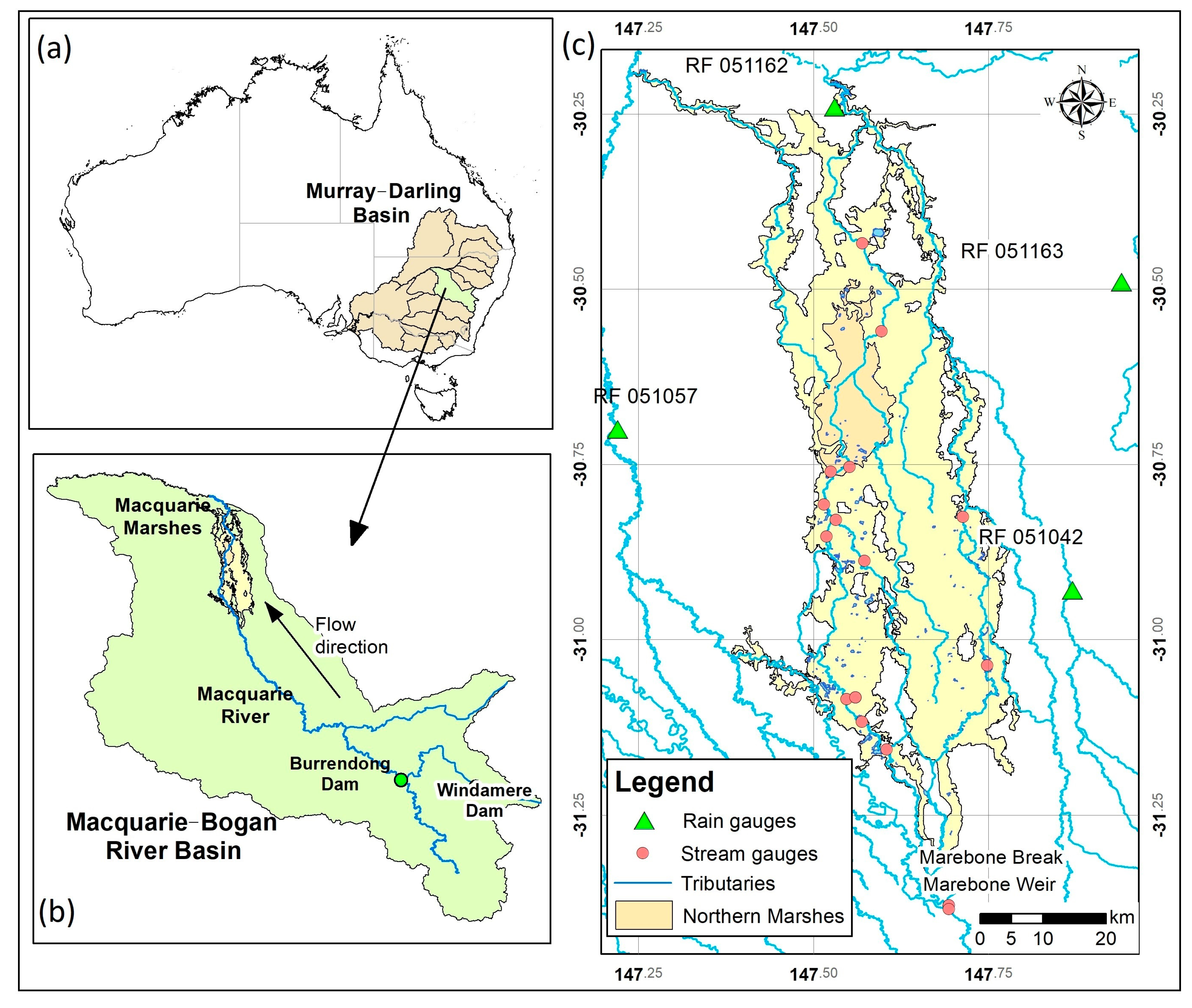
3.1. Study Area: Macquarie Marshes
3.2. Datasets
3.3. Applying the Inundation Mapping Algorithm over the Study Area
3.4. Accuracy Assessment
3.5. Additional Assessment
4. Results
4.1. Training and Validation of the Random Forest Model
4.2. Accuracy Assessment of Inundation Maps and Comparison with Available Datasets
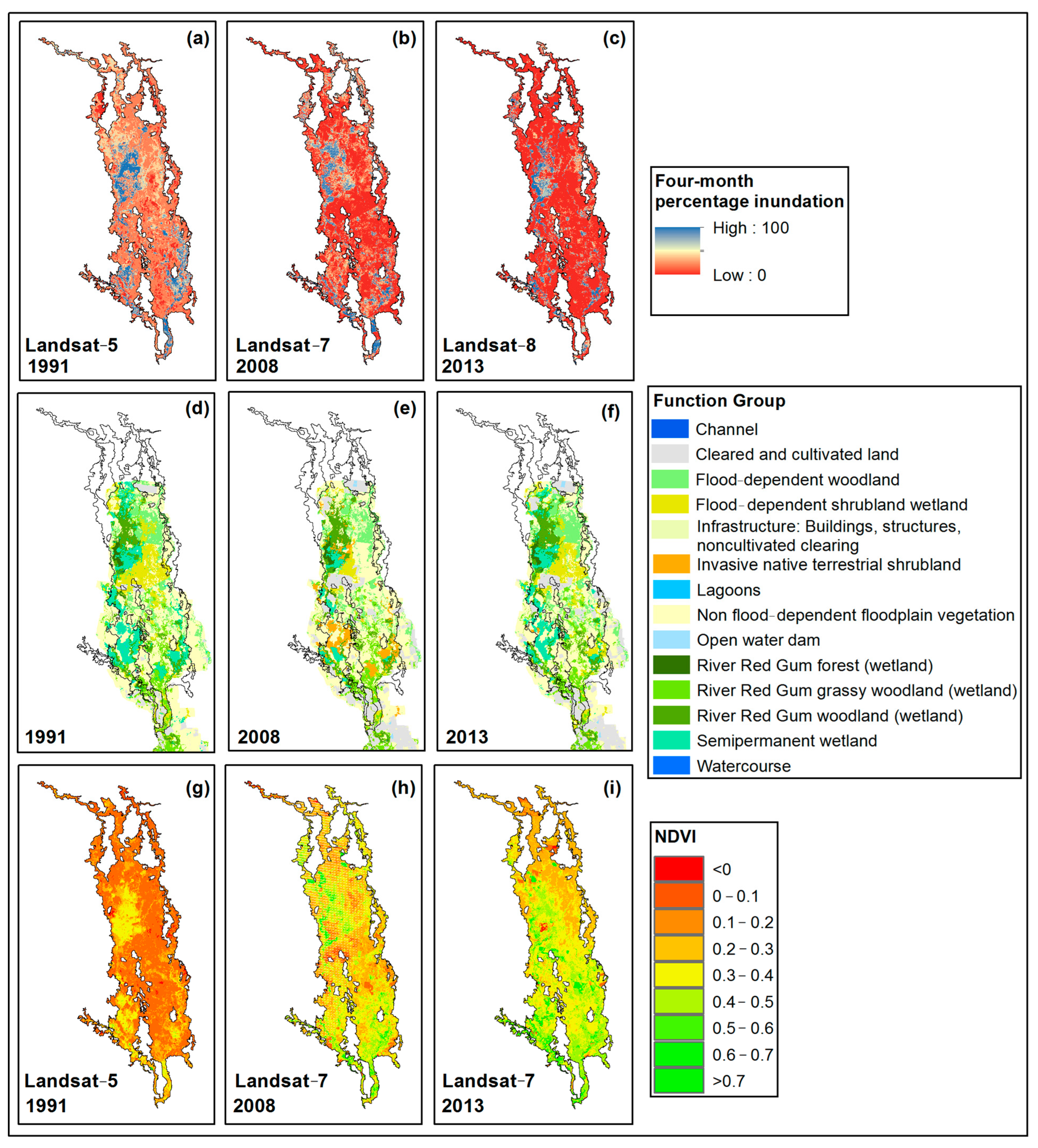
4.3. Characteristics of the Inundated Areas as Mapped from Different Land Cover Classes
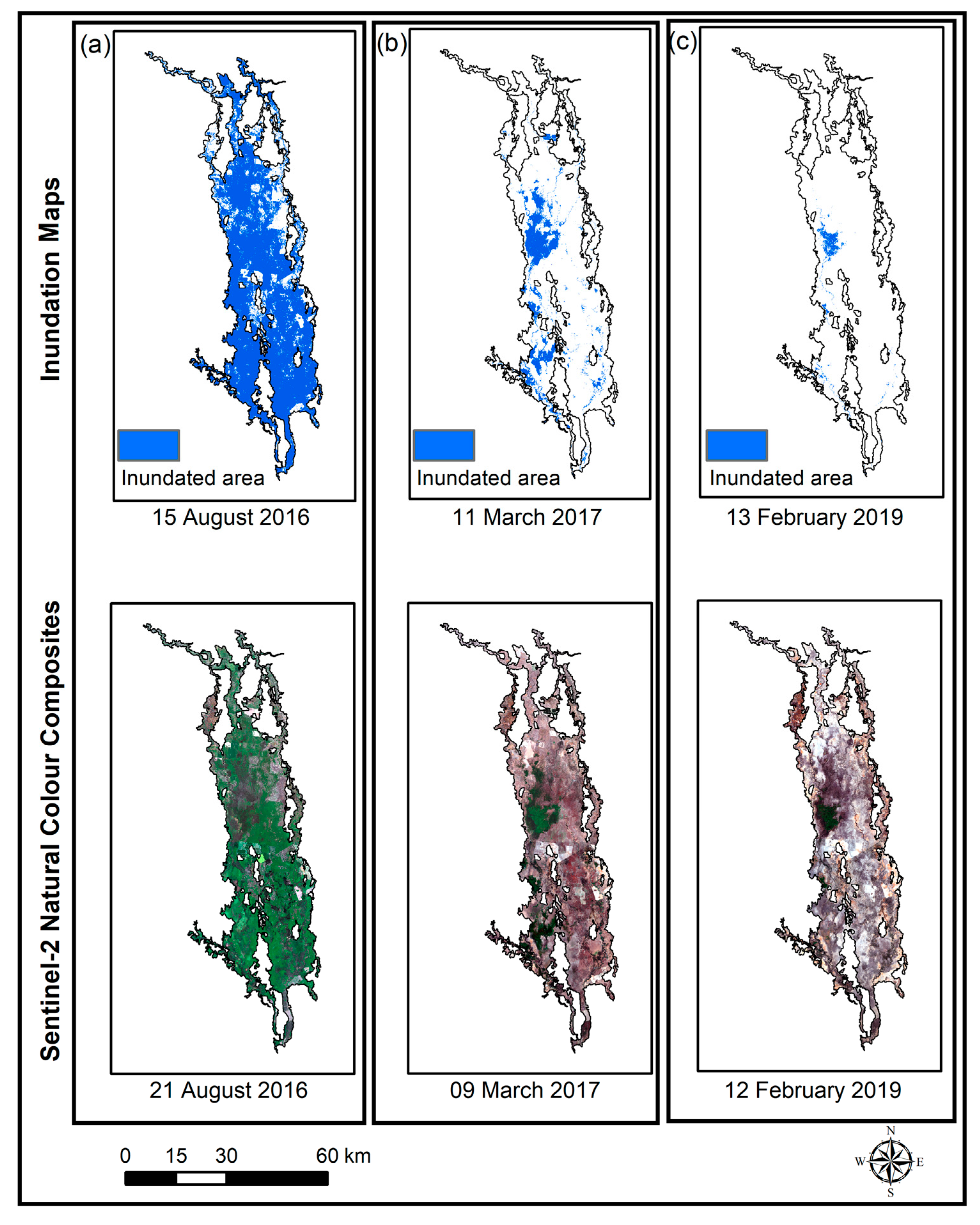
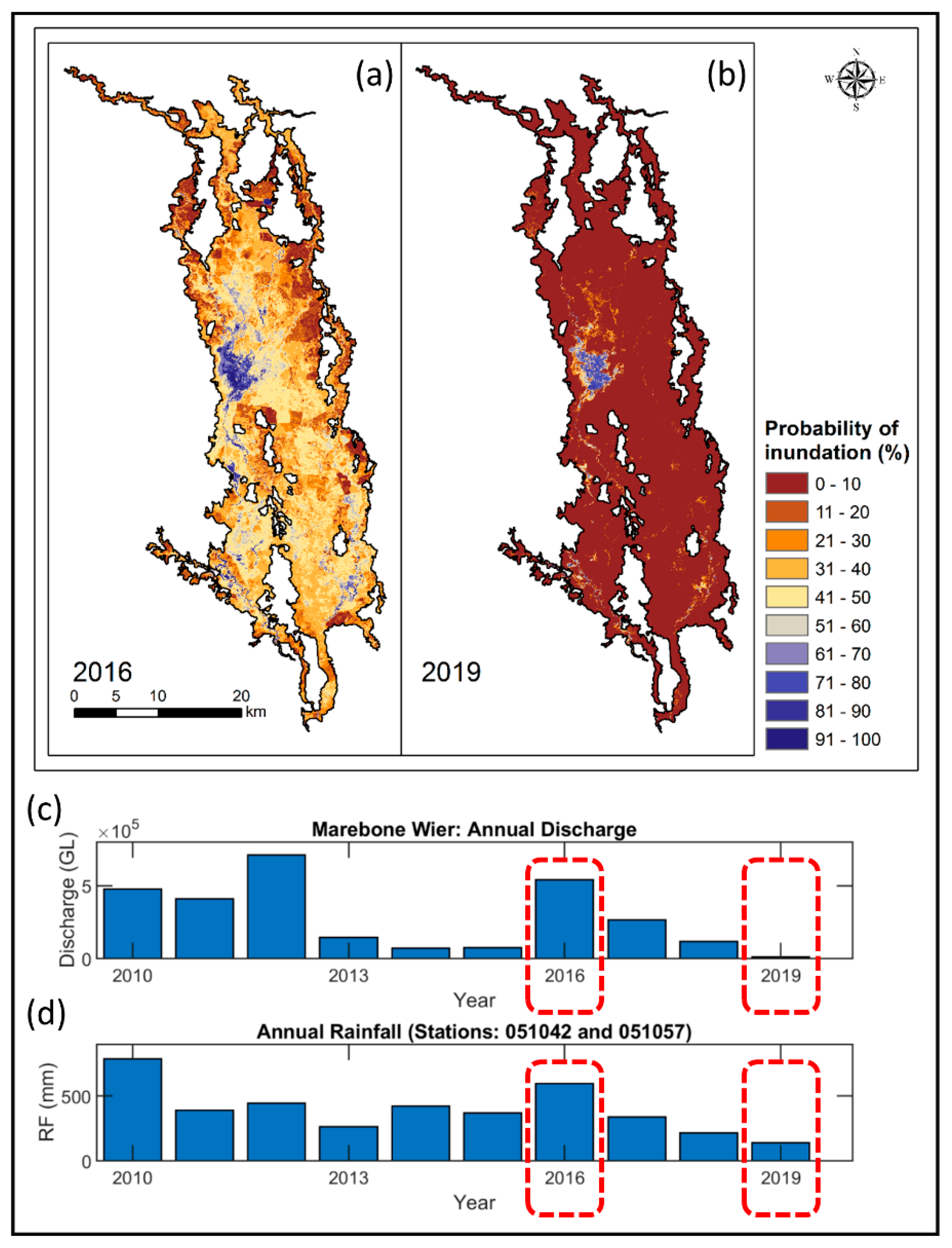
4.4. Inundation Change Dynamics: Comparison with Hydrometeorological Conditions
4.5. Spatial Patterns of Temporal Inundation Dynamics
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

| Band Name | Description | Wavelength | Spatial Resolution |
|---|---|---|---|
| USGS Landsat 5 Surface Reflectance Tier 1 | |||
| B1 | Band 1 (blue) surface reflectance | 0.45–0.52 μm | 30 m |
| B2 | Band 2 (green) surface reflectance | 0.52–0.60 μm | 30 m |
| B3 | Band 3 (red) surface reflectance | 0.63–0.69 μm | 30 m |
| B4 | Band 4 (NIR) surface reflectance | 0.77–0.90 μm | 30 m |
| B5 | Band 5 (SWIR 1) surface reflectance | 1.55–1.75 μm | 30 m |
| B7 | Band 7 (SWIR 2) surface reflectance | 2.08–2.35 μm | 30 m |
| USGS Landsat 7 Surface Reflectance Tier 1 | |||
| B1 | Band 1 (blue) surface reflectance | 0.45–0.52 μm | 30 m |
| B2 | Band 2 (green) surface reflectance | 0.52–0.60 μm | 30 m |
| B3 | Band 3 (red) surface reflectance | 0.63–0.69 μm | 30 m |
| B4 | Band 4 (NIR) surface reflectance | 0.77–0.90 μm | 30 m |
| B5 | Band 5 (SWIR 1) surface reflectance | 1.55–1.75 μm | 30 m |
| B7 | Band 7 (SWIR 2) surface reflectance | 2.08–2.35 μm | 30 m |
| USGS Landsat 8 Surface Reflectance Tier 1 | |||
| B2 | Band 2 (blue) surface reflectance | 0.452–0.512 μm | 30 m |
| B3 | Band 3 (green) surface reflectance | 0.533–0.590 μm | 30 m |
| B4 | Band 4 (red) surface reflectance | 0.636–0.673 μm | 30 m |
| B5 | Band 5 (NIR) surface reflectance | 0.851–0.879 μm | 30 m |
| B6 | Band 6 (SWIR 1) surface reflectance | 1.566–1.651 μm | 30 m |
| B7 | Band 7 (SWIR 2) surface reflectance | 2.107–2.294 μm | 30 m |
References
- Gardner, R.C.; Davidson, N.C. The Ramsar Convention. In Wetlands; Springer: Berlin/Heidelberg, Germany, 2011; pp. 189–203. [Google Scholar]
- Matthews, G.V.T. The Ramsar Convention on Wetlands: its History and Development; Ramsar Convention Bureau: Gland, Switzerland, 1993. [Google Scholar]
- Department of Agriculture Water and Environment, Australia. Water Policy and Resources. Available online: https://www.environment.gov.au/wetlands (accessed on 29 September 2020).
- Gibbs, J.P. Importance of small wetlands for the persistence of local populations of wetland-associated animals. Wetlands 1993, 13, 25–31. [Google Scholar]
- Silvius, M.; Oneka, M.; Verhagen, A. Wetlands: lifeline for people at the edge. Phys. Chem. Earth Part B Hydrol. Ocean. Atmos. 2000, 25, 645–652. [Google Scholar]
- Williams, J.D.; Dodd, C.K., Jr. Importance of wetlands to endangered and threatened species. In Wetland Functions and Values: The State of Our Understanding; American Water Resources Association: Woodbridge, VA, USA, 1978; pp. 565–575. [Google Scholar]
- Chiu, M.-C.; Leigh, C.; Mazor, R.; Cid, N.; Resh, V. Anthropogenic threats to intermittent rivers and ephemeral streams. In Intermittent Rivers and Ephemeral Streams; Elsevier: Amsterdam, The Netherlands, 2017; pp. 433–454. [Google Scholar]
- Kobayashi, T.; Ryder, D.S.; Ralph, T.J.; Mazumder, D.; Saintilan, N.; Iles, J.; Knowles, L.; Thomas, R.; Hunter, S. Longitudinal spatial variation in ecological conditions in an in-channel floodplain river system during flow pulses. River Res. Appl. 2011, 27, 461–472. [Google Scholar] [CrossRef]
- Randklev, C.R.; Miller, T.; Hart, M.; Morton, J.; Johnson, N.A.; Skow, K.; Inoue, K.; Tsakiris, E.T.; Oetker, S.; Smith, R. A semi-arid river in distress: Contributing factors and recovery solutions for three imperiled freshwater mussels (Family Unionidae) endemic to the Rio Grande basin in North America. Sci. Total Environ. 2018, 631, 733–744. [Google Scholar] [CrossRef]
- Robinove, C.J. Interpretation of a Landsat image of an unusual flood phenomenon in Australia. Remote Sens. Environ. 1978, 7, 219–225. [Google Scholar]
- Smith, L.C. Satellite remote sensing of river inundation area, stage, and discharge: A review. Hydrol. Process. 1997, 11, 1427–1439. [Google Scholar]
- Wulder, M.A.; Loveland, T.R.; Roy, D.P.; Crawford, C.J.; Masek, J.G.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Belward, A.S.; Cohen, W.B. Current status of Landsat program, science, and applications. Remote Sens. Environ. 2019, 225, 127–147. [Google Scholar]
- Thomas, R.F.; Kingsford, R.T.; Lu, Y.; Cox, S.J.; Sims, N.C.; Hunter, S.J. Mapping inundation in the heterogeneous floodplain wetlands of the Macquarie Marshes, using Landsat Thematic Mapper. J. Hydrol. 2015, 524, 194–213. [Google Scholar]
- Tulbure, M.G.; Broich, M.; Stehman, S.V.; Kommareddy, A. Surface water extent dynamics from three decades of seasonally continuous Landsat time series at subcontinental scale in a semi-arid region. Remote Sens. Environ. 2016, 178, 142–157. [Google Scholar]
- Heimhuber, V.; Tulbure, M.; Broich, M. Modeling multidecadal surface water inundation dynamics and key drivers on large river basin scale using multiple time series of E arth-observation and river flow data. Water Resour. Res. 2017, 53, 1251–1269. [Google Scholar] [CrossRef]
- Senay, G.B.; Schauer, M.; Friedrichs, M.; Velpuri, N.M.; Singh, R.K. Satellite-based water use dynamics using historical Landsat data (1984–2014) in the southwestern United States. Remote Sens. Environ. 2017, 202, 98–112. [Google Scholar] [CrossRef]
- Mueller, N.; Lewis, A.; Roberts, D.; Ring, S.; Melrose, R.; Sixsmith, J.; Lymburner, L.; McIntyre, A.; Tan, P.; Curnow, S. Water observations from space: Mapping surface water from 25 years of Landsat imagery across Australia. Remote Sens. Environ. 2016, 174, 341–352. [Google Scholar] [CrossRef] [Green Version]
- Donchyts, G.; Baart, F.; Winsemius, H.; Gorelick, N.; Kwadijk, J.; Van De Giesen, N. Earth’s surface water change over the past 30 years. Nat. Clim. Chang. 2016, 6, 810–813. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- Frazier, P.S.; Page, K.J. Water body detection and delineation with Landsat TM data. Photogramm. Eng. Remote Sens. 2000, 66, 1461–1468. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Gao, B.-C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Pope, R.M.; Fry, E.S. Absorption spectrum (380–700 nm) of pure water. II. Integrating cavity measurements. Appl. Opt. 1997, 36, 8710–8723. [Google Scholar] [CrossRef]
- Smith, R.C.; Baker, K.S. Optical properties of the clearest natural waters (200–800 nm). Appl. Opt. 1981, 20, 177–184. [Google Scholar] [CrossRef]
- Hogg, A.; Holland, J. An evaluation of DEMs derived from LiDAR and photogrammetry for wetland mapping. For. Chron. 2008, 84, 840–849. [Google Scholar] [CrossRef] [Green Version]
- Lang, M.; McCarty, G.; Oesterling, R.; Yeo, I.-Y. Topographic metrics for improved mapping of forested wetlands. Wetlands 2013, 33, 141–155. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M. Wetland mapping with LiDAR derivatives, SAR polarimetric decompositions, and LiDAR–SAR fusion using a random forest classifier. Can. J. Remote Sens. 2013, 39, 290–307. [Google Scholar] [CrossRef]
- Krause, C.E.; Newey, V.; Alger, M.J.; Lymburner, L. Mapping and monitoring the multi-decadal dynamics of Australia’s open waterbodies using Landsat. Remote Sens. 2021, 13, 1437. [Google Scholar] [CrossRef]
- Australian Government. DEA Waterbodies. Available online: https://cmi.ga.gov.au/data-products/dea/693/dea-waterbodies-landsat#details (accessed on 1 May 2022).
- Yeo, I.-Y.; Lang, M.; Vermote, E. Improved understanding of suspended sediment transport process using multi-temporal Landsat data: A case study from the Old Woman Creek Estuary (Ohio). IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 7, 636–647. [Google Scholar] [CrossRef]
- Huang, X.; Lu, Q.; Zhang, L. A multi-index learning approach for classification of high-resolution remotely sensed images over urban areas. ISPRS J. Photogramm. Remote Sens. 2014, 90, 36–48. [Google Scholar] [CrossRef]
- Tang, Z.; Li, Y.; Gu, Y.; Jiang, W.; Xue, Y.; Hu, Q.; LaGrange, T.; Bishop, A.; Drahota, J.; Li, R. Assessing Nebraska playa wetland inundation status during 1985–2015 using Landsat data and Google Earth Engine. Environ. Monit. Assess. 2016, 188, 654. [Google Scholar] [CrossRef] [PubMed]
- Verpoorter, C.; Kutser, T.; Tranvik, L. Automated mapping of water bodies using Landsat multispectral data. Limnol. Oceanogr. Methods 2012, 10, 1037–1050. [Google Scholar] [CrossRef]
- Araya-López, R.A.; Lopatin, J.; Fassnacht, F.E.; Hernández, H.J. Monitoring Andean high altitude wetlands in central Chile with seasonal optical data: A comparison between Worldview-2 and Sentinel-2 imagery. ISPRS J. Photogramm. Remote Sens. 2018, 145, 213–224. [Google Scholar] [CrossRef]
- Kaplan, G.; Avdan, U. Monthly analysis of wetlands dynamics using remote sensing data. ISPRS Int. J. Geo-Inf. 2018, 7, 411. [Google Scholar] [CrossRef] [Green Version]
- Tung, F.; LeDrew, E. The determination of optimal threshold levels for change detection using various accuracy indexes. Photogramm. Eng. Remote Sens. 1988, 54, 1449–1454. [Google Scholar]
- Huang, C.; Smith, L.C.; Kyzivat, E.D.; Fayne, J.V.; Ming, Y.; Spence, C. Tracking transient boreal wetland inundation with Sentinel-1 SAR: Peace-Athabasca Delta, Alberta and Yukon Flats, Alaska. GIScience Remote Sens. 2022, 59, 1767–1792. [Google Scholar] [CrossRef]
- Sahour, H.; Kemink, K.M.; O’Connell, J. Integrating SAR and optical remote sensing for conservation-targeted wetlands mapping. Remote Sens. 2021, 14, 159. [Google Scholar] [CrossRef]
- Adeli, S.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.J.; Chapman, B. Moving Toward L-Band NASA-ISRO SAR Mission (NISAR) Dense Time Series: Multipolarization Object-Based Classification of Wetlands Using Two Machine Learning Algorithms. Earth Space Sci. 2021, 8, 2021EA001742. [Google Scholar] [CrossRef]
- Fang, H.; Liang, S. Leaf Area Index Models, Reference Module in Earth Systems and Environmental Sciences. Encycl. Ecol. 2014, 2139–2148. [Google Scholar]
- Zhang, F.; Zhou, G. Estimation of vegetation water content using hyperspectral vegetation indices: A comparison of crop water indicators in response to water stress treatments for summer maize. BMC Ecol. 2019, 19, 1–12. [Google Scholar] [CrossRef] [Green Version]
- López-Tapia, S.; Ruiz, P.; Smith, M.; Matthews, J.; Zercher, B.; Sydorenko, L.; Varia, N.; Jin, Y.; Wang, M.; Dunn, J.B. Machine learning with high-resolution aerial imagery and data fusion to improve and automate the detection of wetlands. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102581. [Google Scholar] [CrossRef]
- Mallick, J.; Talukdar, S.; Pal, S.; Rahman, A. A novel classifier for improving wetland mapping by integrating image fusion techniques and ensemble machine learning classifiers. Ecol. Inform. 2021, 65, 101426. [Google Scholar] [CrossRef]
- Gemechu, G.F.; Rui, X.; Lu, H. Wetland Change Mapping Using Machine Learning Algorithms, and Their Link with Climate Variation and Economic Growth: A Case Study of Guangling County, China. Sustainability 2021, 14, 439. [Google Scholar] [CrossRef]
- Zhang, L.; Hu, Q.; Tang, Z. Using Sentinel-2 Imagery and Machine Learning Algorithms to Assess the Inundation Status of Nebraska Conservation Easements during 2018–2021. Remote Sens. 2022, 14, 4382. [Google Scholar] [CrossRef]
- Gonzalez-Perez, A.; Abd-Elrahman, A.; Wilkinson, B.; Johnson, D.J.; Carthy, R.R. Deep and Machine Learning Image Classification of Coastal Wetlands Using Unpiloted Aircraft System Multispectral Images and Lidar Datasets. Remote Sens. 2022, 14, 3937. [Google Scholar] [CrossRef]
- Ho, T.K. Random decision forests. In Proceedings of the 3rd International Conference on Document Analysis and Recognition, Montreal, QC, Canada, 14–16 August 1995; pp. 278–282. [Google Scholar]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.; Adeli, S.; Brisco, B. Google Earth Engine for geo-big data applications: A meta-analysis and systematic review. ISPRS J. Photogramm. Remote Sens. 2020, 164, 152–170. [Google Scholar] [CrossRef]
- Ahmed, K.R.; Akter, S. Analysis of landcover change in southwest Bengal delta due to floods by NDVI, NDWI and K-means cluster with Landsat multi-spectral surface reflectance satellite data. Remote Sens. Appl. Soc. Environ. 2017, 8, 168–181. [Google Scholar] [CrossRef]
- Colditz, R.R.; Souza, C.T.; Vazquez, B.; Wickel, A.J.; Ressl, R. Analysis of optimal thresholds for identification of open water using MODIS-derived spectral indices for two coastal wetland systems in Mexico. Int. J. Appl. Earth Obs. Geoinf. 2018, 70, 13–24. [Google Scholar] [CrossRef]
- Szabo, S.; Gácsi, Z.; Balazs, B. Specific features of NDVI, NDWI and MNDWI as reflected in land cover categories. Landsc. Environ. 2016, 10, 194–202. [Google Scholar] [CrossRef]
- Liu, H.Q.; Huete, A. A feedback based modification of the NDVI to minimize canopy background and atmospheric noise. IEEE Trans. Geosci. Remote Sens. 1995, 33, 457–465. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Khaliq, A.; Musci, M.A.; Chiaberge, M. Analyzing relationship between maize height and spectral indices derived from remotely sensed multispectral imagery. In Proceedings of the 2018 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), Washington, DC, USA, 9–11 October 2018; pp. 1–5. [Google Scholar]
- USGS. Landsat Surface Reflectance-Derived Spectral Indices, Landsat Enhanced Vegetation Index. Available online: https://www.usgs.gov/core-science-systems/nli/landsat/landsat-enhanced-vegetation-index?qt-science_support_page_related_con=0#qt-science_support_page_related_con (accessed on 11 December 2020).
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- USGS. Landsat Soil Adjusted Vegetation Index. Available online: https://www.usgs.gov/landsat-missions/landsat-soil-adjusted-vegetation-index (accessed on 20 November 2021).
- Memon, A.A.; Muhammad, S.; Rahman, S.; Haq, M. Flood monitoring and damage assessment using water indices: A case study of Pakistan flood-2012. Egypt. J. Remote Sens. Space Sci. 2015, 18, 99–106. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Pal, M. Random forest classifier for remote sensing classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Thomas, R.F.; Ocock, J.F. Macquarie Marshes: Murray-Darling River Basin (Australia). In The Wetland Book; Finlayson, C.M., Milton, G.R., Prentice, R.C., Davidson, N.C., Eds.; Srpinger: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- McComb, A.J.; Lake, P.S. The Conservation of Australian Wetlands; Surrey Beatty & Sons: Chipping Norton, Australia, 1988. [Google Scholar]
- OEH. Environmental Water Use in New South Wales. Outcomes 2013–14; Office of Environment and Heritage: Sydney, Australia, 2014. [Google Scholar]
- Kingsford, R.; Johnson, W. Impact of water diversions on colonially-nesting waterbirds in the Macquarie Marshes of arid Australia. Colonial Waterbirds 1998, 21, 159–170. [Google Scholar] [CrossRef]
- Kingsford, R.T.; Auld, K.M. Waterbird breeding and environmental flow management in the Macquarie Marshes, arid Australia. River Res. Appl. 2005, 21, 187–200. [Google Scholar] [CrossRef]
- Ren, S.; Kingsford, R.T.; Thomas, R.F. Modelling flow to and inundation of the Macquarie Marshes in arid Australia. Environmetrics 2010, 21, 549–561. [Google Scholar] [CrossRef]
- Ren, S.; Kingsford, R.T. Statistically integrated flow and flood modelling compared to hydrologically integrated quantity and quality model for annual flows in the regulated Macquarie River in arid Australia. Environ. Manag. 2011, 48, 177–188. [Google Scholar] [CrossRef]
- Rogers, K.; Ralph, T.J. Floodplain Wetland Biota in the Murray-Darling Basin: Water and Habitat Requirements; Csiro Publishing: Melbourne, Australia, 2010. [Google Scholar]
- Kingsford, R.T.; Thomas, R.F. The Macquarie Marshes in arid Australia and their waterbirds: a 50-year history of decline. Environ. Manag. 1995, 19, 867–878. [Google Scholar] [CrossRef]
- Kingsford, R.T. Ecological impacts of dams, water diversions and river management on floodplain wetlands in Australia. Austral. Ecol. 2000, 25, 109–127. [Google Scholar] [CrossRef]
- Rayner, T.S.; Jenkins, K.M.; Kingsford, R.T. Small environmental flows, drought and the role of refugia for freshwater fish in the Macquarie Marshes, arid Australia. Ecohydrol. Ecosyst. Land Water Process Interact. Ecohydrogeomorphol. 2009, 2, 440–453. [Google Scholar] [CrossRef]
- Murray-Darling Basin Authority. The Basin Plan. Available online: https://www.mdba.gov.au/basin-plan/plan-murray-darling-basin (accessed on 1 October 2021).
- The Central Resource for Sharing and Enabling Environmental Data in NSW. Inundation Maps for NSW Inland Floodplain Wetlands. Available online: https://datasets.seed.nsw.gov.au/dataset/inundation-maps-for-nsw-inland-floodplain-wetlands (accessed on 20 December 2020).
- Earth Engine Data Catalog. A Planetary-Scale Platform for Earth Science Data & Analysis. Available online: https://developers.google.com/earth-engine/datasets (accessed on 1 September 2020).
- Fisher, A.; Flood, N.; Danaher, T. Comparing Landsat water index methods for automated water classification in eastern Australia. Remote Sens. Environ. 2016, 175, 167–182. [Google Scholar] [CrossRef]
- Vermote, E.; Saleous, N. LEDAPS Surface Reflectance Product Description; University of Maryland, College Park: City of College Park, MD, USA, 2007. [Google Scholar]
- USGS. Landsat 4-7 Collection 1 (C1) Surface Reflectance (LEDAPS) Product Guide; Version 3.0; Department of the Interior, U.S. Geological Survey: Reston, VA, USA, 2020.
- Vermote, E.; Roger, J.-C.; Franch, B.; Skakun, S. LaSRC (Land Surface Reflectance Code): Overview, application and validation using MODIS, VIIRS, LANDSAT and Sentinel 2 data′s. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8173–8176. [Google Scholar]
- USGS. Landsat 8 Collection 1 (C1) Land Surface Reflectance Code (LaSRC) Product Guide; Department of the Interior, U.S. Geological Survey: Reston, VA, USA, 2020.
- Bowen, S.; Simpson, S.; Honeysett, J.; Humphries, J. Technical report: Vegetation extent and condition mapping of the. Aust. For. 2019, 49, 4–15. [Google Scholar]
- Hsu, K.-l.; Gao, X.; Sorooshian, S.; Gupta, H.V. Precipitation estimation from remotely sensed information using artificial neural networks. J. Appl. Meteorol. 1997, 36, 1176–1190. [Google Scholar] [CrossRef]
- Sorooshian, S.; Hsu, K.; Braithwaite, D.; Ashouri, H.; NOAA CDR Program. NOAA Climate Data Record (CDR) of Precipitation Estimation from Remotely Sensed Information using Artificial Neural Networks (PERSIANN-CDR), Version 1; National Centers for Environmental Information: Asheville, NC, USA, 2014. [Google Scholar] [CrossRef]
- Ashouri, H.; Hsu, K.-L.; Sorooshian, S.; Braithwaite, D.K.; Knapp, K.R.; Cecil, L.D.; Nelson, B.R.; Prat, O.P. PERSIANN-CDR: Daily precipitation climate data record from multisatellite observations for hydrological and climate studies. Bull. Am. Meteorol. Soc. 2015, 96, 69–83. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.; Peng, Y.; Lang, M.; Yeo, I.-Y.; McCarty, G. Wetland inundation mapping and change monitoring using Landsat and airborne LiDAR data. Remote Sens. Environ. 2014, 141, 231–242. [Google Scholar] [CrossRef]
- Jin, H.; Huang, C.; Lang, M.W.; Yeo, I.-Y.; Stehman, S.V. Monitoring of wetland inundation dynamics in the Delmarva Peninsula using Landsat time-series imagery from 1985 to 2011. Remote Sens. Environ. 2017, 190, 26–41. [Google Scholar] [CrossRef] [Green Version]
- Wen, L.; Macdonald, R.; Morrison, T.; Hameed, T.; Saintilan, N.; Ling, J. From hydrodynamic to hydrological modelling: Investigating long-term hydrological regimes of key wetlands in the Macquarie Marshes, a semi-arid lowland floodplain in Australia. J. Hydrol. 2013, 500, 45–61. [Google Scholar] [CrossRef]
- Thomas, R.F.; Kingsford, R.T.; Lu, Y.; Hunter, S.J. Landsat mapping of annual inundation (1979–2006) of the Macquarie Marshes in semi-arid Australia. Int. J. Remote Sens. 2011, 32, 4545–4569. [Google Scholar] [CrossRef]
- Australian Government, Bureau of Meteorology. Climate Summaries Archive. Available online: http://www.bom.gov.au/climate/current/statement_archives.shtml (accessed on 10 March 2021).
- Brock, P.M. The significance of the physical environment of the Macquarie Marshes. Aust. Geogr. 1998, 29, 71–90. [Google Scholar] [CrossRef]
- Kobayashi, T.; Ryder, D.S.; Gordon, G.; Shannon, I.; Ingleton, T.; Carpenter, M.; Jacobs, S.J. Short-term response of nutrients, carbon and planktonic microbial communities to floodplain wetland inundation. Aquat. Ecol. 2009, 43, 843–858. [Google Scholar] [CrossRef]
- Kauth, R.J.; Thomas, G. The tasselled cap—a graphic description of the spectral-temporal development of agricultural crops as seen by Landsat. LARS Symp. 1976, 159, 1. [Google Scholar]
- Sörensen, R.; Zinko, U.; Seibert, J. On the calculation of the topographic wetness index: evaluation of different methods based on field observations. Hydrol. Earth Syst. Sci. 2006, 10, 101–112. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









| Dataset | Period of Data Used in the Study | Spatial Resolution of the Bands Used | Temporal Resolution/Re-Visit Time | Data Source |
|---|---|---|---|---|
| Landsat 5 Surface Reflectance Tier 1 (LANDSAT/LT05/C01/T1_SR) | 1987–2011 | 30 m | 18-days | USGS (available at GEE) |
| Landsat 7 Surface Reflectance Tier 1 (LANDSAT/LE07/C01/T1_SR) | 1999–2020 | 30 m | 16-days | USGS (available at GEE) |
| Landsat 8 Surface Reflectance dataset (LANDSAT/LC08/C01/T1_SR) | 2013–2020 | 30 m | 16-days | USGS (available at GEE) |
| Inundation Maps in Macquarie Marshes | 21 July 2010, 6 August 2010, 30 August 2010, 7 September 2010, 23 September 2010 | 30 m | - | Thomas et al. [13] and DPIE |
| Airborne survey data | 2008 and 2013 (one image per year) | 50 cm | - | NSW Spatial Services |
| Google Earth images | 5 October 2010, 11 December 2015, 5 August 2018 | ~50 cm−2 | - | Google Earth |
| Sentinel-2 MSI: MultiSpectral Instrument, Level-1C | 21 August 2016, 9 March 2017, 12 February 2019 | 10 m | ~5-days | European Union/ESA/Copernicus (available at GEE) |
| Streamflow/discharge at Marebone Weir and Marebone Break | 1986–2019 | - | Daily | Water NSW |
| Rainfall (gauges no 051042 and 051057) | 1986–2019 | - | Daily | Bureau of Meteorology, Australia |
| Rainfall (PERSIANN) | 1986–2019 | 0.25° | Daily | NOAA NCDC (available at GEE) |
| Vegetation Maps | 1991, 2008, 2013 | - | - | DPIE |
| Reference Image Source | Date | Landsat Sensor Associated with the Inundation Map | Number of Random Points | Percentage Accuracy |
|---|---|---|---|---|
| Google Earth | 5 August 2018 | Landsat 8 OLI/TIRS | 26 | 88% |
| Google Earth | 5 August 2018 | Landsat 7 ETM+ | 26 | 93% |
| Google Earth | 11 December 2015 | Landsat 7 ETM+ | 25 | 92% |
| Google Earth | 5 October 2010 | Landsat 5 TM | 30 | 91% |
| Google Earth | 5 October 2010 | Landsat 7 ETM+ | 30 | 94% |
| Reference Data | |||||||
|---|---|---|---|---|---|---|---|
| Year | 2008 | 2013 | |||||
| Classified Data (Landsat 7 for 2008 and Landsat 8 for 2013) | Inundated | Noninundated | Total | Inundated | Noninundated | Total | |
| Inundated | 79 | 21 | 100 | 87 | 13 | 100 | |
| Noninundated | 2 | 98 | 100 | 8 | 92 | 100 | |
| Total | 81 | 119 | 200 | 95 | 105 | 200 | |
| 2008 | |||||||
| User’s accuracy | Producer’s accuracy | Commission error | Omission error | ||||
| Inundated | =(79/100) × 100% = 79.0% | =(79/81) × 100% = 97.5% | 21.0% | 2.5% | |||
| Noninundated | =(98/100) × 100% = 98.0% | =(98/119) × 100% = 82.4% | 2.0% | 17.6% | |||
| Overall accuracy = 88.5% | |||||||
| 2013 | |||||||
| User’s accuracy | Producer’s accuracy | Commission error | Omission error | ||||
| Inundated | =(87/100) × 100% = 87.0% | =(87/95) × 100% = 91.6% | 13.0% | 8.4% | |||
| Noninundated | =(92/100) × 100% = 92.0% | =(92/105) × 100% = 87.6% | 8.0% | 12.4% | |||
| Overall accuracy = 89.5% | |||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Senanayake, I.P.; Yeo, I.-Y.; Kuczera, G.A. A Random Forest-Based Multi-Index Classification (RaFMIC) Approach to Mapping Three-Decadal Inundation Dynamics in Dryland Wetlands Using Google Earth Engine. Remote Sens. 2023, 15, 1263. https://doi.org/10.3390/rs15051263
Senanayake IP, Yeo I-Y, Kuczera GA. A Random Forest-Based Multi-Index Classification (RaFMIC) Approach to Mapping Three-Decadal Inundation Dynamics in Dryland Wetlands Using Google Earth Engine. Remote Sensing. 2023; 15(5):1263. https://doi.org/10.3390/rs15051263
Chicago/Turabian StyleSenanayake, Indishe P., In-Young Yeo, and George A. Kuczera. 2023. "A Random Forest-Based Multi-Index Classification (RaFMIC) Approach to Mapping Three-Decadal Inundation Dynamics in Dryland Wetlands Using Google Earth Engine" Remote Sensing 15, no. 5: 1263. https://doi.org/10.3390/rs15051263
APA StyleSenanayake, I. P., Yeo, I.-Y., & Kuczera, G. A. (2023). A Random Forest-Based Multi-Index Classification (RaFMIC) Approach to Mapping Three-Decadal Inundation Dynamics in Dryland Wetlands Using Google Earth Engine. Remote Sensing, 15(5), 1263. https://doi.org/10.3390/rs15051263