
CHFNet: Curvature Half-Level Fusion Network for Single-Frame Infrared Small Target Detection

Abstract
:1. Introduction
- A large variation in size: Because of the large difference in the shooting distance, many targets usually vary in size from a few pixels to thousands. As a result, detection algorithms need to take into account the features of both smaller and larger targets.
- Irregular shape: Different targets at different distances can appear to have different shapes when looking at infrared images.
- Concealment: There are often noises such as clouds and buildings in the infrared image, which possess similar characteristics as small targets in specific cases. Their presence could affect the detection of targets.
- We propose the novel CHFNet for IRSTD. The experiments on the public NUAA-SIRST database illustrated the effectiveness and robustness of the proposed CHFNet.
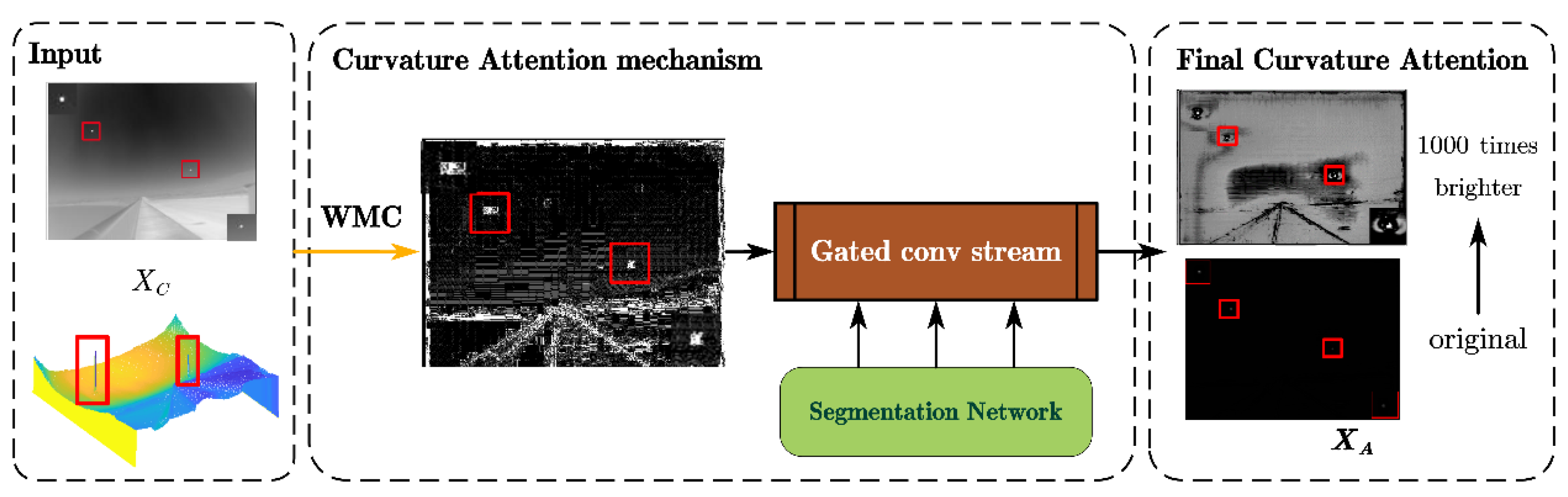
- We developed a curvature attention mechanism based on the curvature information of the image, which more reliably extracts the small target shape features, while suppressing complex background clutter to a certain extent.
- We designed a half-level fusion block, a new bottom-up cross-layer feature fusion method that minimizes the distortion at different levels of the feature.
2. Materials and Methods
2.1. Related Work
2.1.1. Infrared Small Target Detection
2.1.2. Cross-Layer Feature Fusion
2.1.3. Curvature-Based Image Processing
2.2. Method
2.2.1. Overall Architecture
2.2.2. Half-Level Fusion Block
2.2.3. Curvature Attention
2.2.4. Loss Function
3. Results
3.1. Evaluation Metrics
3.2. Experiment Settings and Dataset
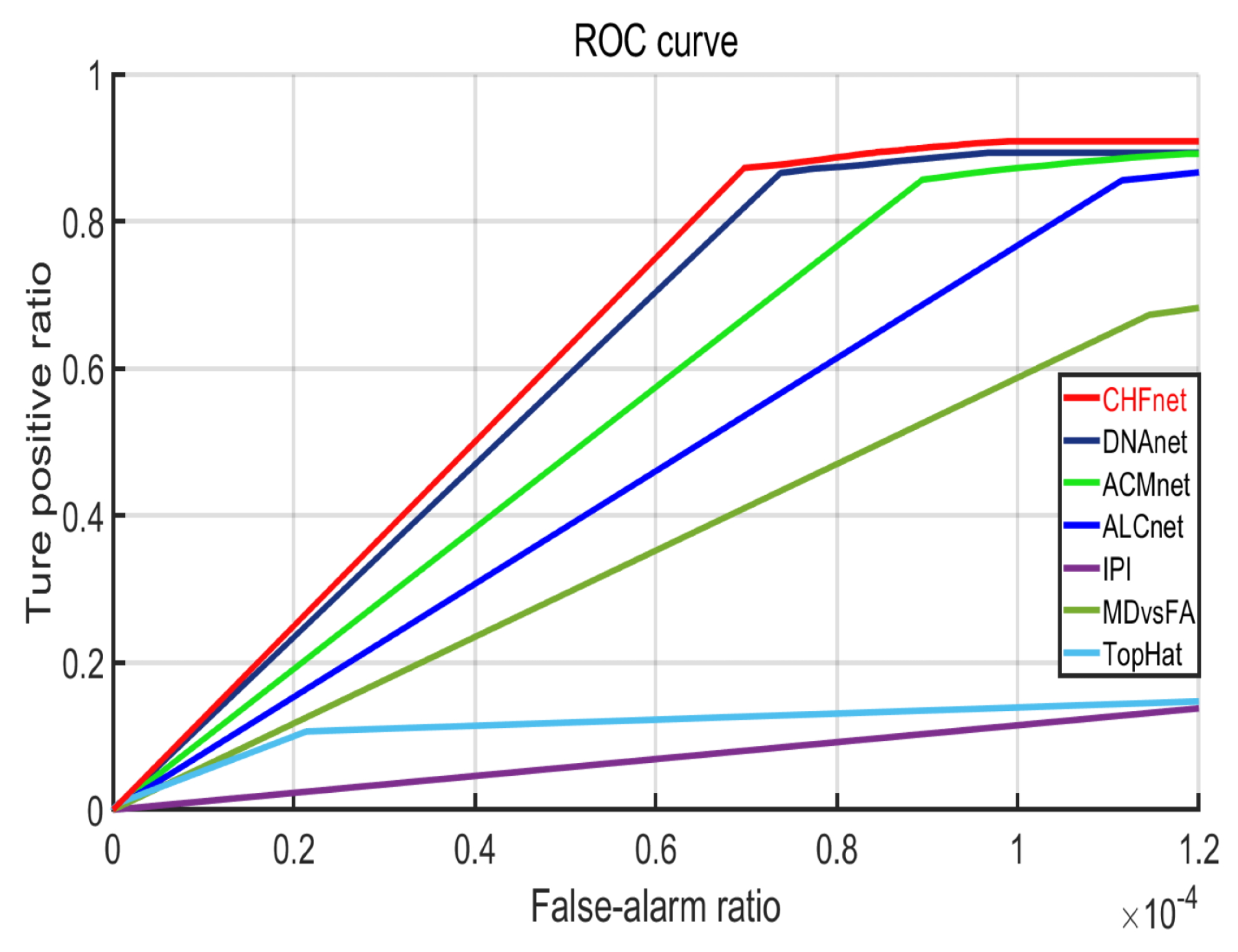
3.3. Experimental Results and Comparison
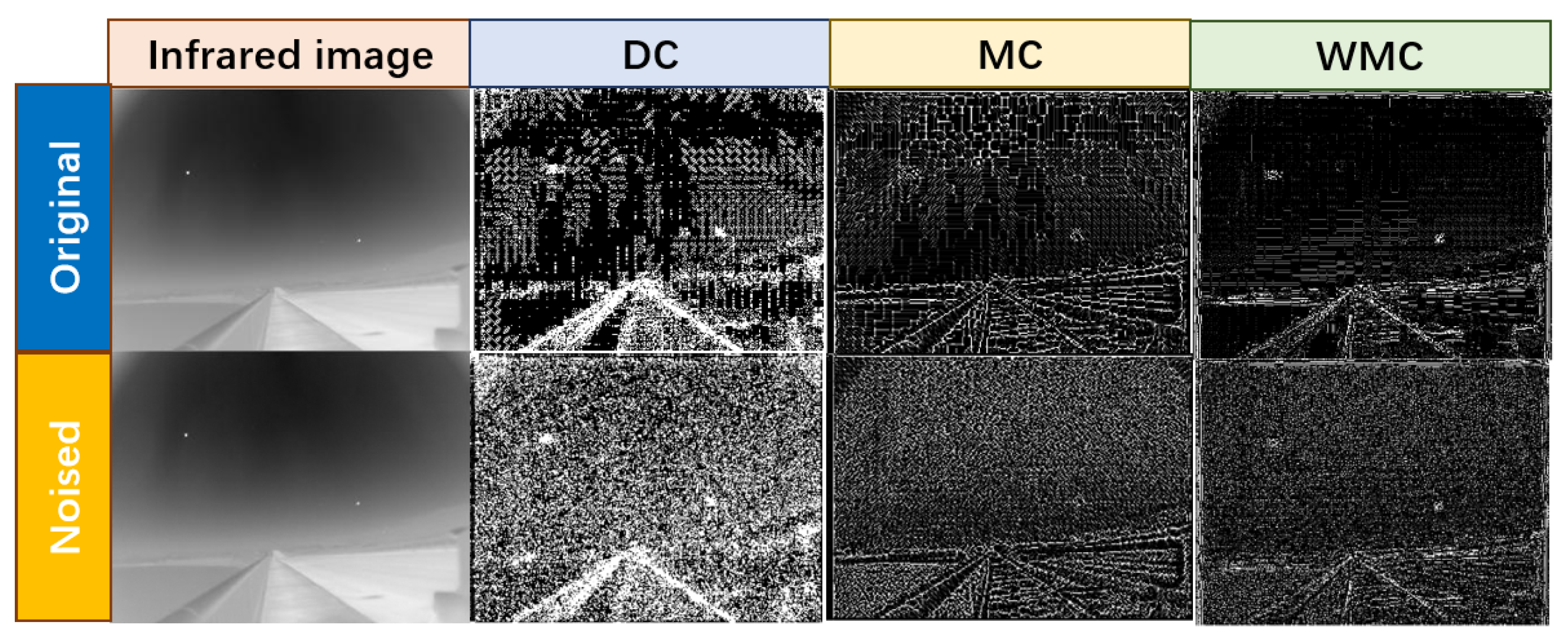
3.4. Visual Results
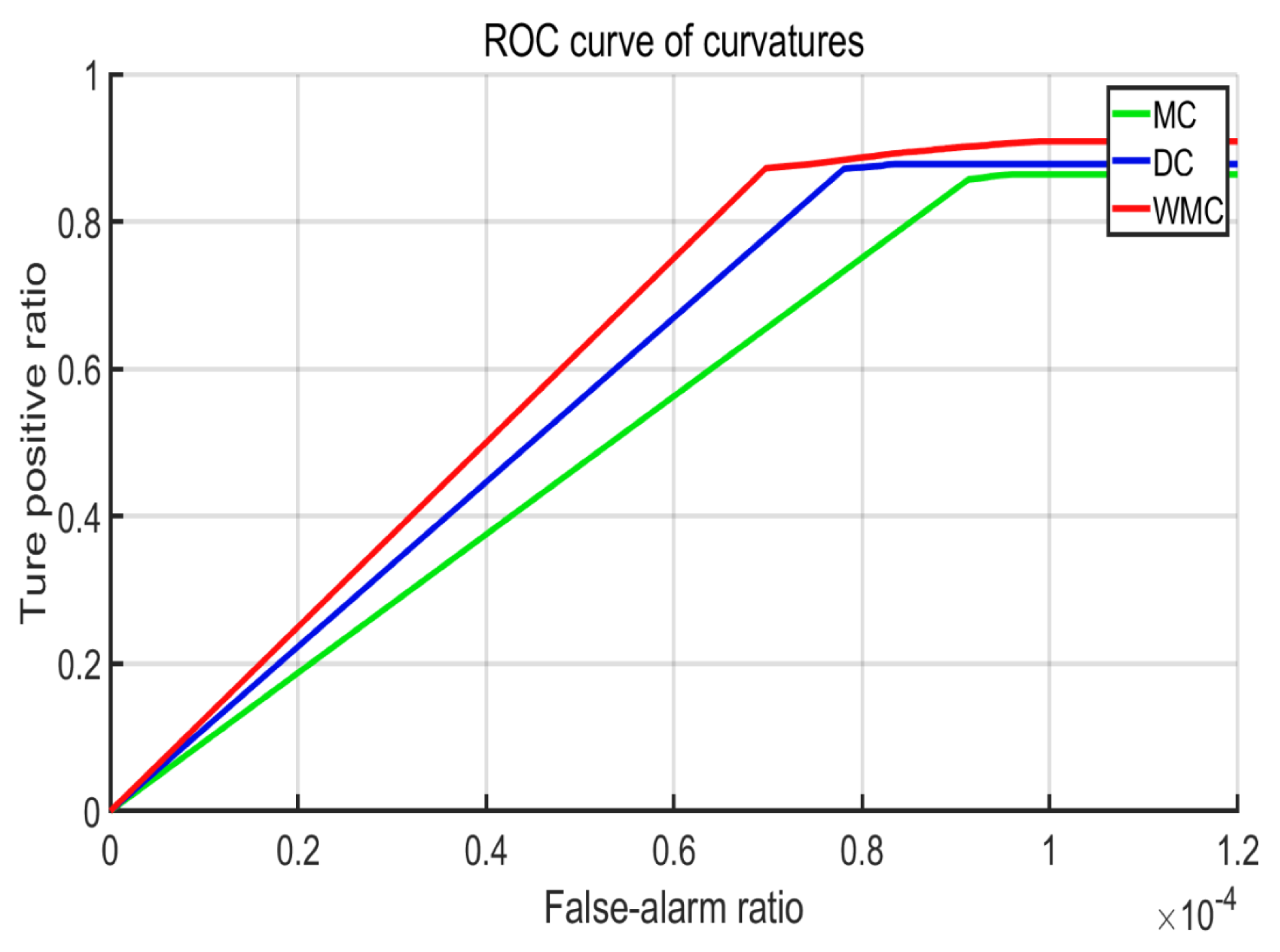
3.5. Ablation Study
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Marvasti, F.S.; Mosavi, M.R.; Nasiri, M. Flying small target detection in IR images based on adaptive toggle operator. IET Comput. Vis. 2018, 12, 527–534. [Google Scholar] [CrossRef]
- Anju, T.S.; Raj, N.R.N. Shearlet transform based image denoising using histogram thresholding. In Proceedings of the 2016 International Conference on Communication Systems and Networks (ComNet), Thiruvananthapuram, India, 21–23 July 2016; pp. 162–166. [Google Scholar] [CrossRef]
- Hou, X.; Zhang, L. Saliency Detection: A Spectral Residual Approach. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–8. [Google Scholar] [CrossRef]
- Wei, Y.; You, X.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recognit. 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Li, M.; He, Y.; Zhang, J. Small Infrared Target Detection Based on Low-Rank Representation. In Proceedings of the 8th International Conference, ICIG 2015, Tianjin, China, 13–16 August 2015. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, N.; Li, Y.; Gao, X. Deep latent low-rank representation for face sketch synthesis. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3109–3123. [Google Scholar] [CrossRef]
- Zhang, M.; Li, Y.; Wang, N.; Chi, Y.; Gao, X. Cascaded face sketch synthesis under various illuminations. IEEE Trans. Image Process. 2020, 29, 1507–1521. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y.; Zhou, F.; Barnard, K. Asymmetric Contextual Modulation for Infrared Small Target Detection. In Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2021; pp. 949–958. [Google Scholar] [CrossRef]
- Zhang, M.; Yue, K.; Zhang, J.; Li, Y.; Gao, X. Exploring Feature Compensation and Cross-Level Correlation for Infrared Small Target Detection. In Proceedings of the 30th ACM International Conference on Multimedia, MM’22, Lisboa, Portugal, 10–14 October 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 1857–1865. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, R.; Yang, Y.; Bai, H.; Zhang, J.; Guo, J. ISNet: Shape Matters for Infrared Small Target Detection. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 867–876. [Google Scholar] [CrossRef]
- Zhang, M.; Bai, H.; Zhang, J.; Zhang, R.; Wang, C.; Guo, J.; Gao, X. RKformer: Runge-Kutta Transformer with Random-Connection Attention for Infrared Small Target Detection. In Proceedings of the 30th ACM International Conference on Multimedia, MM’22, Lisboa, Portugal, 10–14 October 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 1730–1738. [Google Scholar] [CrossRef]
- Ren, D.; Li, J.; Han, M.; Shu, M. DNANet: Dense Nested Attention Network for Single Image Dehazing. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 2035–2039. [Google Scholar] [CrossRef]
- Guo, J.; He, C.; Zhang, M.; Li, Y.; Gao, X.; Song, B. Edge-Preserving Convolutional Generative Adversarial Networks for SAR-to-Optical Image Translation. Remote Sens. 2021, 13, 3575. [Google Scholar] [CrossRef]
- Gong, Y.; Goksel, O. Weighted mean curvature. Signal Process. 2019, 164, 329–339. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, N.; Gao, X.; Li, Y. Markov random neural fields for face sketch synthesis. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence, IJCAI-18, Stockholm, Sweden, 13–19 July 2018; pp. 1142–1148. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, N.; Li, Y.; Wang, R.; Gao, X. Face sketch synthesis from coarse to fine. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018; Volume 32. [Google Scholar] [CrossRef]
- Zhang, M.; Li, J.; Wang, N.; Gao, X. Recognition of facial sketch styles. Neurocomputing 2015, 149, 1188–1197. [Google Scholar] [CrossRef]
- Zhang, M.; Xin, J.; Zhang, J.; Tao, D.; Gao, X. Microscope Chip Image Super-Resolution Reconstruction via Curvature Consistent Network. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar]
- Zhang, M.; Wu, Q.; Zhang, J.; Gao, X.; Guo, J.; Tao, D. Fluid micelle network for image super-resolution reconstruction. IEEE Trans. Cybern. 2022, 53, 578–591. [Google Scholar] [CrossRef]
- Zhao, M.; Cheng, L.; Yang, X.; Feng, P.; Liu, L.; Wu, N. TBC-Net: A real-time detector for infrared small target detection using semantic constraint. arXiv 2019, arXiv:2001.05852. [Google Scholar]
- Zhao, B.; Wang, C.; Fu, Q.; Han, Z. A Novel Pattern for Infrared Small Target Detection with Generative Adversarial Network. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4481–4492. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, L.; Wang, L. Miss Detection vs. False Alarm: Adversarial Learning for Small Object Segmentation in Infrared Images. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8508–8517. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y.; Zhou, F.; Barnard, K. Attentional Local Contrast Networks for Infrared Small Target Detection. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9813–9824. [Google Scholar] [CrossRef]
- Zuo, Z.; Tong, X.; Wei, J.; Su, S.; Wu, P.; Guo, R.; Sun, B. AFFPN: Attention Fusion Feature Pyramid Network for Small Infrared Target Detection. Remote Sens. 2022, 14, 3412. [Google Scholar] [CrossRef]
- Lv, G.; Dong, L.; Liang, J.; Xu, W. Novel Asymmetric Pyramid Aggregation Network for Infrared Dim and Small Target Detection. Remote Sens. 2022, 14, 5643. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, N.; Li, Y.; Gao, X. Bionic face sketch generator. IEEE Trans. Cybern. 2019, 50, 2701–2714. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, J.; Chi, Y.; Li, Y.; Wang, N.; Gao, X. Cross-domain face sketch synthesis. IEEE Access 2019, 7, 98866–98874. [Google Scholar] [CrossRef]
- Zhang, M.; Wu, Q.; Guo, J.; Li, Y.; Gao, X. Heat transfer-inspired network for image super-resolution reconstruction. IEEE Trans. Onneural Netw. Learn. Syst. 2022, ahead of print, 1–11. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, N.; Li, Y.; Gao, X. Neural probabilistic graphical model for face sketch synthesis. IEEE Trans. Onneural Netw. Learn. Syst. 2020, 31, 2623–2637. [Google Scholar] [CrossRef]
- Zhang, M.; Li, J.; Wang, N.; Gao, X. Compositional model-based sketch generator in facial entertainment. IEEE Trans. Cybern. 2017, 48, 904–915. [Google Scholar] [CrossRef]
- Zhang, S.; Gao, X.; Wang, N.; Li, J.; Zhang, M. Face sketch synthesis via sparse representation-based greedy search. IEEE Trans. Image Process. 2015, 24, 2466–2477. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, R.; Gao, X.; Li, J.; Tao, D. Dual-transfer face sketch-photo synthesis. IEEE Trans. Image Process. 2019, 28, 642–657. [Google Scholar] [CrossRef] [PubMed]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. arXiv 2015, arXiv:1505.04597. [Google Scholar]
- Wang, W.; Xie, E.; Song, X.; Zang, Y.; Wang, W.; Lu, T.; Yu, G.; Shen, C. Efficient and Accurate Arbitrary-Shaped Text Detection with Pixel Aggregation Network. arXiv 2019, arXiv:1908.05900. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. arXiv 2016, arXiv:1612.03144. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. arXiv 2015, arXiv:1506.02640. [Google Scholar]
- Zhang, M.; Xin, J.; Zhang, J.; Tao, D.; Gao, X. Curvature consistent network for microscope chip image super-resolution. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar] [CrossRef]
- Lee, S.H.; Seo, J.K. Noise removal with Gauss curvature-driven diffusion. IEEE Trans. Image Process. 2005, 14, 904–909. [Google Scholar] [CrossRef]
- Fairag, F.; Chen, K.; Ahmad, S. An effective algorithm for mean curvature-based image deblurring problem. Comput. Appl. Math. 2022, 41, 176. [Google Scholar] [CrossRef]
- Chen, Q.; Montesinos, P.; Sun, Q.S.; Heng, P.A. Adaptive total variation denoising based on difference curvature. Image Vis. Comput. 2010, 28, 298–306. [Google Scholar] [CrossRef]
- Kamgar-Parsi, B.; Kamgar-Parsi, B.; Rosenfeld, A. Optimally isotropic Laplacian operator. IEEE Trans. Image Process. 1999, 8, 1467–1472. [Google Scholar] [CrossRef]
- Bai, X.; Zhou, F. Analysis of new top-hat transformation and the application for infrared dim small target detection. Pattern Recognit. 2010, 43, 2145–2156. [Google Scholar] [CrossRef]
- Deshpande, S.D.; Er, M.H.; Venkateswarlu, R.; Chan, P. Max-mean and max-median filters for detection of small targets. In Signal Data Processing of Small Targets; SPIE: Bellingham, WA, USA, 1999; Volume 3809, pp. 74–83. [Google Scholar] [CrossRef]
- Han, J.; Moradi, S.; Faramarzi, I.; Zhang, H.; Zhao, Q.; Zhang, X.; Li, N. Infrared Small Target Detection Based on the Weighted Strengthened Local Contrast Measure. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1670–1674. [Google Scholar] [CrossRef]
- Han, J.; Moradi, S.; Faramarzi, I.; Liu, C.; Zhang, H.; Zhao, Q. A Local Contrast Method for Infrared Small-Target Detection Utilizing a Tri-Layer Window. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1822–1826. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptmann, A.G. Infrared Patch-Image Model for Small Target Detection in a Single Image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, L.; Zhang, T.; Cao, S.; Peng, Z. Infrared Small Target Detection via Non-Convex Rank Approximation Minimization Joint l2,1 Norm. Remote Sens. 2018, 10, 1821. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y. Reweighted Infrared Patch-Tensor Model With Both Nonlocal and Local Priors for Single-Frame Small Target Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3752–3767. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, Z. Infrared Small Target Detection Based on Partial Sum of the Tensor Nuclear Norm. Remote Sens. 2019, 11, 382. [Google Scholar] [CrossRef]
- Sun, Y.; Yang, J.; An, W. Infrared Dim and Small Target Detection via Multiple Subspace Learning and Spatial-Temporal Patch-Tensor Model. IEEE Trans. Geosci. Remote Sens. 2021, 59, 3737–3752. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | IoU | nIoU | Model | IoU | nIoU | ||||
|---|---|---|---|---|---|---|---|---|---|
| TopHat | 7.143 | 5.201 | 79.84 | 101.2 | PSTNN | 22.40 | 22.35 | 77.95 | 2.911 |
| Max-Median | 4.172 | 2.150 | 69.20 | 5.533 | MSLSTIPT | 10.30 | 9.58 | 82.13 | 113.1 |
| WSLCM | 1.158 | 0.849 | 77.95 | 544.6 | MDvsFA | 60.30 | 58.26 | 89.35 | 5.635 |
| TLLCM | 1.029 | 0.905 | 79.09 | 589.9 | ACMNet | 74.81 | 75.09 | 97.95 | 1.024 |
| IPI | 25.67 | 24.57 | 85.55 | 1.147 | ALCNet | 74.31 | 73.12 | 97.34 | 2.021 |
| NRAM | 12.16 | 10.22 | 74.52 | 1.385 | DNANet | 70.04 | 69.45 | 95.44 | 3.073 |
| RIPT | 11.05 | 10.15 | 79.08 | 2.261 | CHFNet | 78.76 | 77.65 | 98.91 | 1.814 |
| Method | IoU | nIoU | ||
|---|---|---|---|---|
| UNet | 69.28 | 71.77 | 94.50 | 2.653 |
| UNet + curvature | 75.80 | 76.35 | 97.91 | 3.402 |
| UNet + HLF | 77.55 | 75.38 | 98.80 | 0.138 |
| HLF + curvature | 78.76 | 77.65 | 98.91 | 1.814 |
| n | IoU | nIoU | ||
|---|---|---|---|---|
| 0 | 75.80 | 76.35 | 97.90 | 3.402 |
| 1 | 76.11 | 76.47 | 97.96 | 4.280 |
| 2 | 76.89 | 77.52 | 98.17 | 2.129 |
| 3 | 78.76 | 77.65 | 98.91 | 1.814 |
| n | IoU | nIoU | ||
|---|---|---|---|---|
| 0 | 76.37 | 74.95 | 97.77 | 0.528 |
| 1 | 76.42 | 74.70 | 98.52 | 3.087 |
| 2 | 77.35 | 75.63 | 98.65 | 2.852 |
| 3 | 78.76 | 77.65 | 98.91 | 1.814 |
| Curvature | IoU | nIoU | ||
|---|---|---|---|---|
| WMC | 78.76 | 77.65 | 98.91 | 1.814 |
| MC | 74.40 | 73.50 | 98.80 | 2.391 |
| DC | 76.97 | 74.58 | 98.01 | 0.408 |
| Indicators | Mean | Gaussian | DCT | No Filter |
|---|---|---|---|---|
| IoU | 72.72 | 77.90 | 74.95 | 78.76 |
| nIoU | 73.88 | 75.54 | 73.75 | 77.65 |
| 98.08 | 98.08 | 98.08 | 98.91 | |
| 5.052 | 0.634 | 2.315 | 1.814 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Li, B.; Wang, T.; Bai, H.; Yue, K.; Li, Y. CHFNet: Curvature Half-Level Fusion Network for Single-Frame Infrared Small Target Detection. Remote Sens. 2023, 15, 1573. https://doi.org/10.3390/rs15061573
Zhang M, Li B, Wang T, Bai H, Yue K, Li Y. CHFNet: Curvature Half-Level Fusion Network for Single-Frame Infrared Small Target Detection. Remote Sensing. 2023; 15(6):1573. https://doi.org/10.3390/rs15061573
Chicago/Turabian StyleZhang, Mingjin, Bate Li, Tianyu Wang, Haichen Bai, Ke Yue, and Yunsong Li. 2023. "CHFNet: Curvature Half-Level Fusion Network for Single-Frame Infrared Small Target Detection" Remote Sensing 15, no. 6: 1573. https://doi.org/10.3390/rs15061573