
Non-Parametric Tomographic SAR Reconstruction via Improved Regularized MUSIC

 , , ,
, , ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Subspace-Based Reconstruction Methods
- As part of the subspace approach, MUSIC [10,25] conducts a characteristic decomposition for the multidimensional covariance matrix of the input data vector in order to separate the wanted signal from the noise. The pseudo spectrum function p can be formulated as [34]where represents the noise subspace.To isolate the two spaces, the Eigen decomposition of is applied and the number of scatterers determines the limitation barrier between them. Thus, the eigenvectors corresponding to the largest eigenvalues represent the data space, while the eigenvectors corresponding to the smallest eigenvalues represent the noise space.MUSIC relies on the number of scatterers to provide a measurement with very high precision. This is the main reason why only a limited number of works have adapted MUSIC for urban reconstruction, despite its usefulness. In other words, if is wrongly estimated, become rank deficient and the two subspaces become mixed, driving the reconstruction precision to deteriorate significantly.
- Minimum-Norm (MN) algorithm [19,35] is applied to the spectral estimation problem in a similar manner as the MUSIC algorithm. Despite being a high-resolution method, it is considered to be slightly inferior to the MUSIC technique [34]. Its concept consists in finding the optimal solution for the weight vector in order to have a precise location of maxima in the power spectrum [33]:The minimum norm vector can be defined as the vector lying in the noise subspace whose first element is equal to unity. Consequently, the final form of the power distribution profile is given by [35]:where is the first column of an identity matrix.
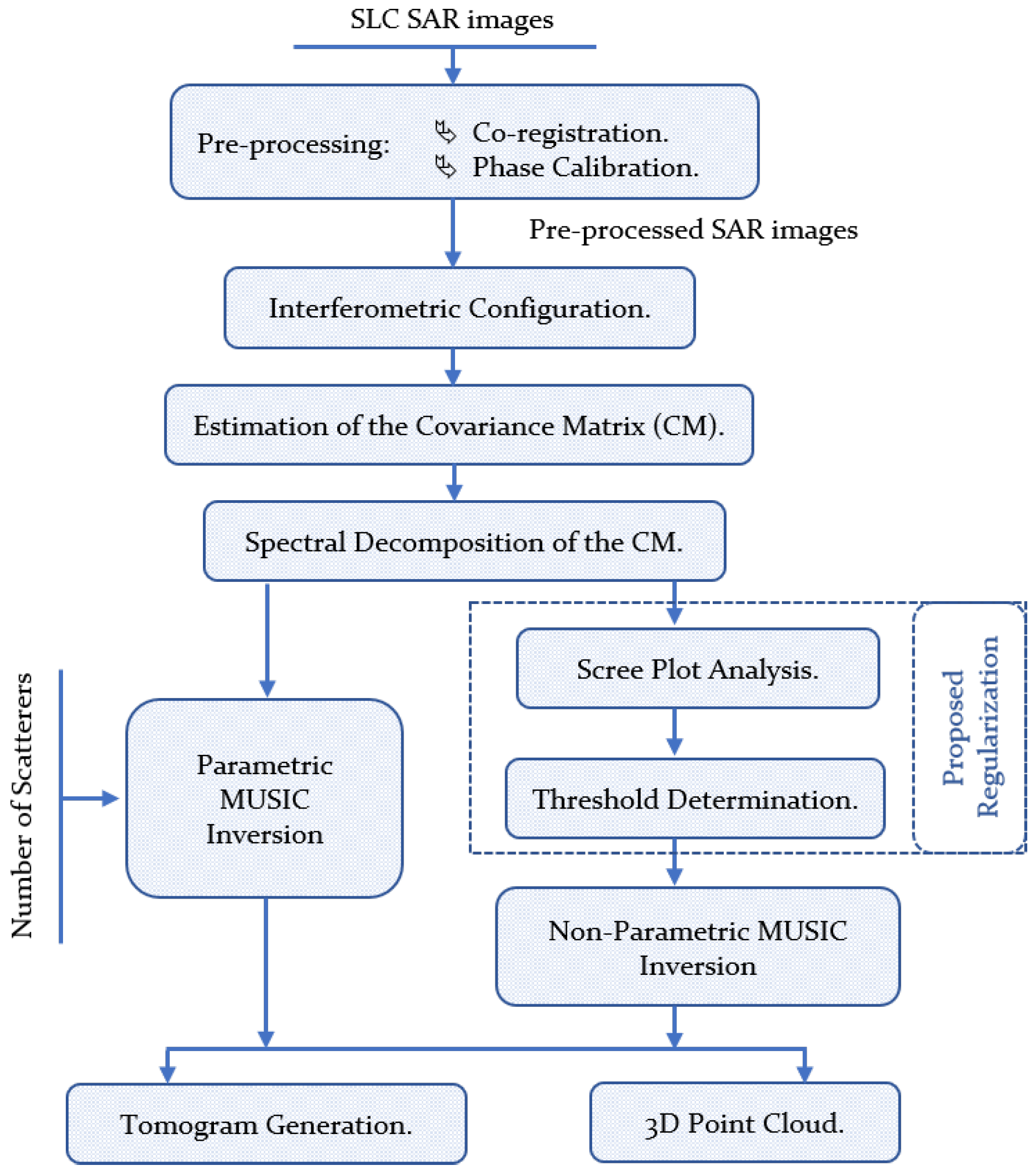
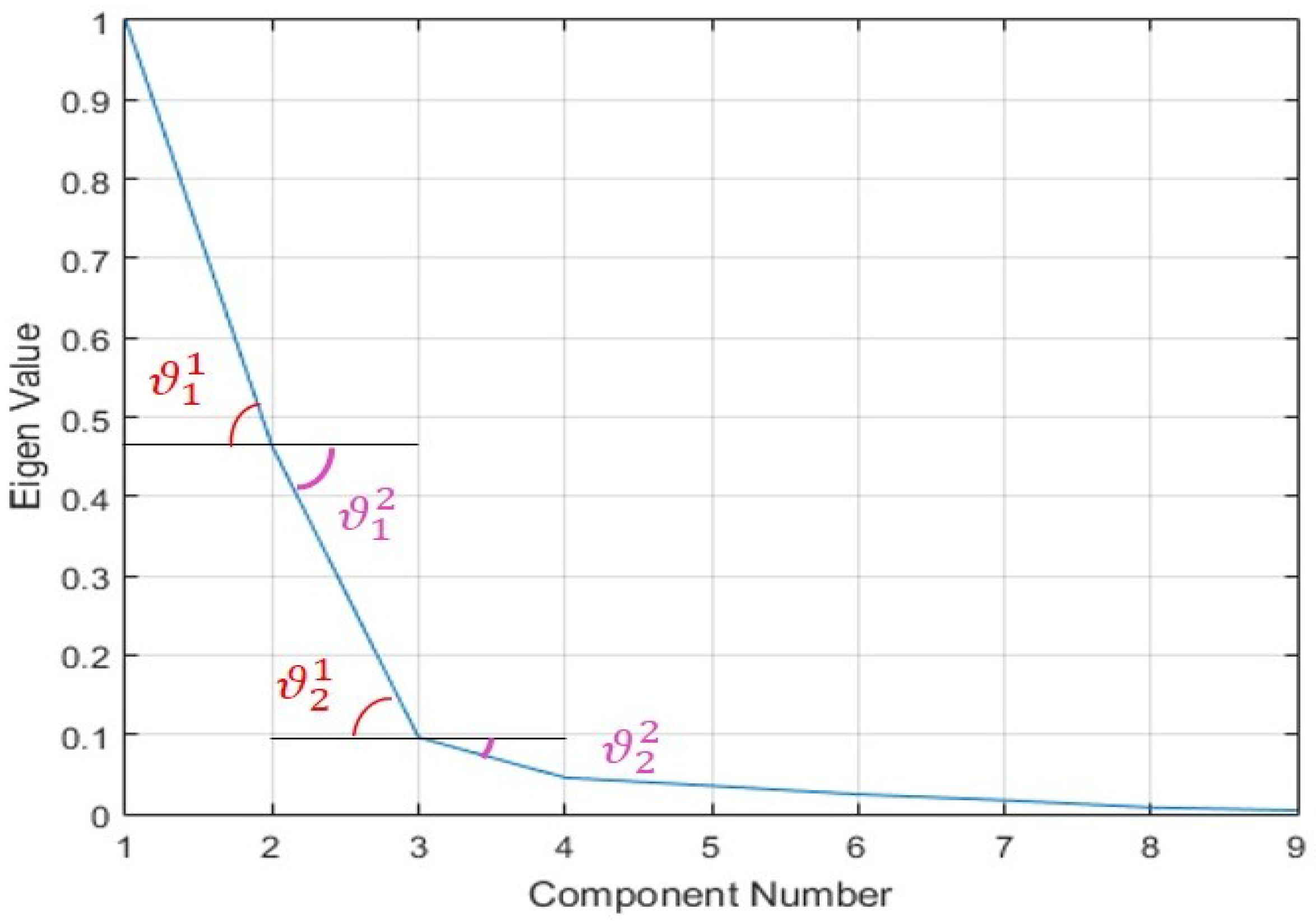
2.2. Proposed Method
3. Results and Discussion
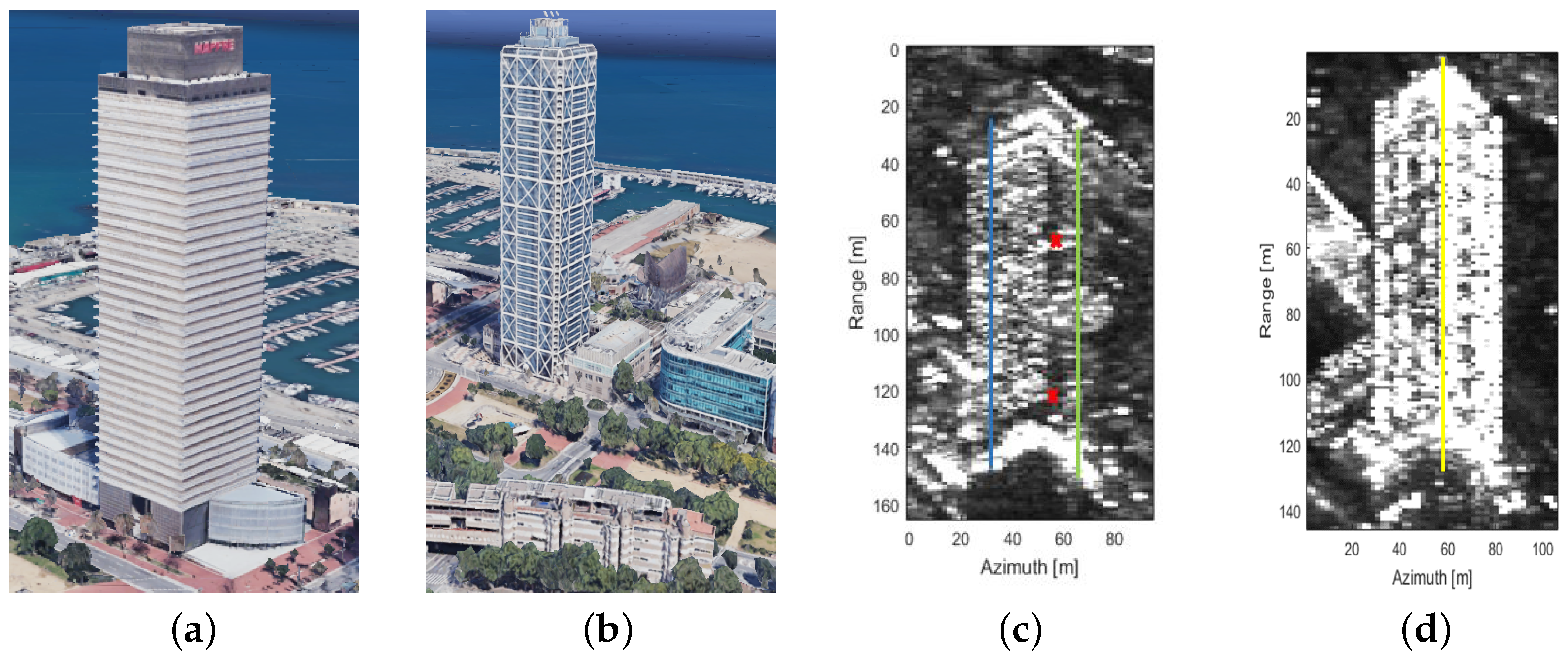
3.1. Data Sets
- A geometric registration on a sub-pixel scale of all images according to a reference one was carried out.
- A phase difference was accomplished by subtracting the phase of the master image from all the images in the data set.
- A phase correction step was completed by subtracting the phase of a ground point that we selected as a reference, which made it possible to compensate the atmospheric phase (note that the atmospheric phase screen is considered constant over the whole image due to the limitation of the scene dimension).
3.2. Performance Metrics
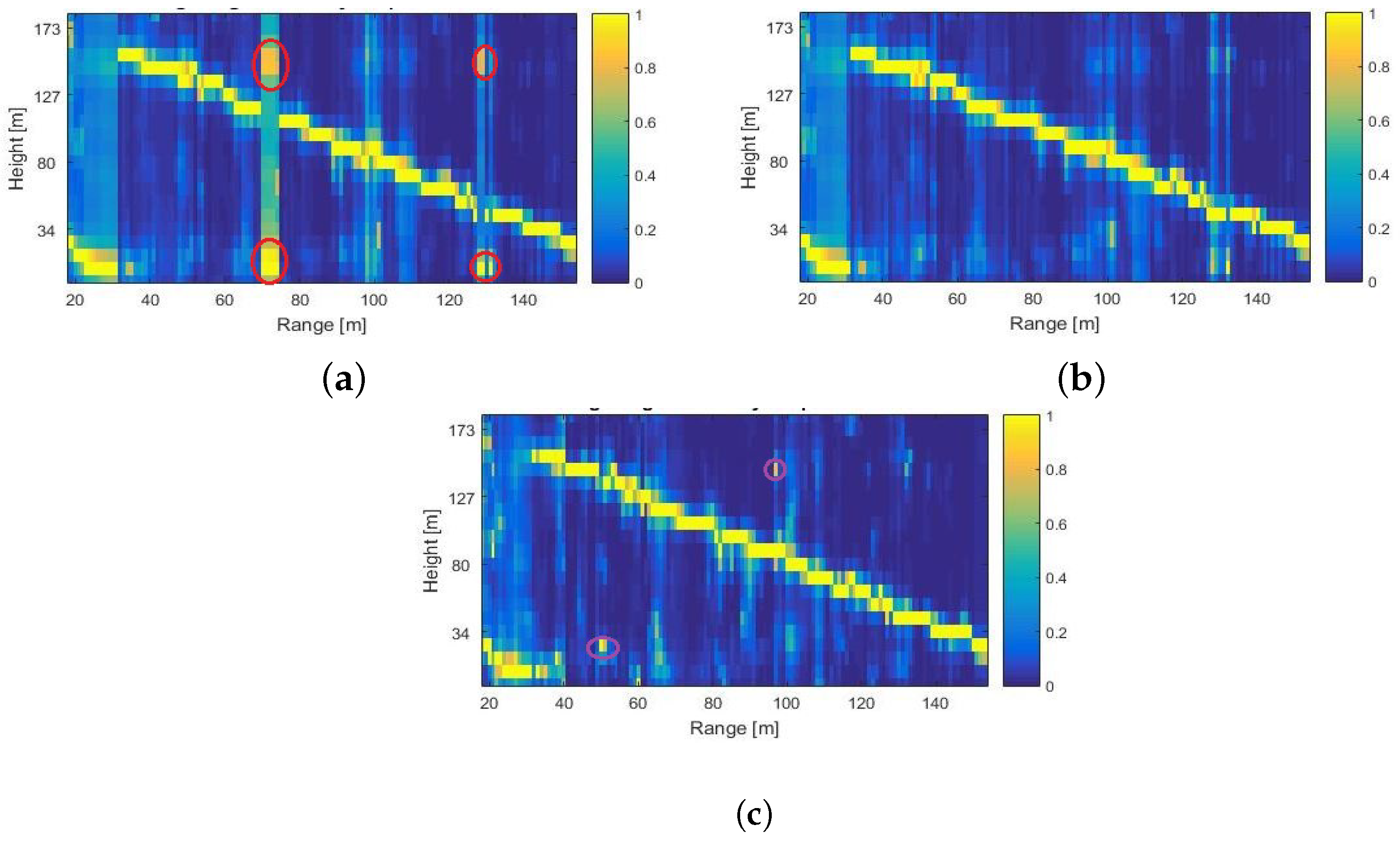
3.3. Analysis and Evaluation
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jordan, R.L. The Seasat-A synthetic aperture radar system. IEEE J. Ocean. Eng. 1980, 5, 154–164. [Google Scholar] [CrossRef]
- Wei, L.; Balz, T.; Liao, M.; Zhang, L. TerraSAR-X StripMap Data Interpretation of Complex Urban Scenarios with 3D SAR Tomography. J. Sens. 2014, 2014, 386753. [Google Scholar] [CrossRef] [Green Version]
- Lavalle, M.; Hawkins, B.; Hensley, S. Tomographic imaging with UAVSAR: Current status and new results from the 2016 AfriSAR campaign. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 2485–2488. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Fornaro, G.; Serafino, F.; Soldovieri, F. Three-dimensional focusing with multipass SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 507–517. [Google Scholar] [CrossRef]
- Reigber, A.; Moreira, A. First demonstration of airborne SAR tomography using multibaseline L-band data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2142–2152. [Google Scholar] [CrossRef]
- Gini, F.; Lombardini, F.; Montanari, M. Layover solution in multibaseline SAR interferometry. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 1344–1356. [Google Scholar] [CrossRef]
- Stoica, P.; Moses, R. Introduction to Spectral Analysis; Prentice Hall: Hoboken, NJ, USA, 1997. [Google Scholar]
- Fornaro, G.; Lombardini, F.; Pauciullo, A.; Reale, D.; Viviani, F. Tomographic Processing of Interferometric SAR Data: Developments, applications, and future research perspectives. IEEE Signal Process. Mag. 2014, 31, 41–50. [Google Scholar] [CrossRef]
- Rambour, C.; Budillon, A.; Johnsy, A.C.; Denis, L.; Tupin, F.; Schirinzi, G. From Interferometric to Tomographic SAR: A Review of Synthetic Aperture Radar Tomography-Processing Techniques for Scatterer Unmixing in Urban Areas. IEEE Geosci. Remote Sens. Mag. 2020, 8, 6–29. [Google Scholar] [CrossRef]
- Budillon, A.; Evangelista, A.; Schirinzi, G. SAR tomography from sparse samples. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; Volume 4, pp. IV-865–IV-868. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Tomographic SAR Inversion by L1-Norm Regularization—The Compressive Sensing Approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3839–3846. [Google Scholar] [CrossRef] [Green Version]
- Budillon, A.; Evangelista, A.; Schirinzi, G. Three-dimensional SAR focusing from multipass signals using compressive sampling. IEEE Trans. Geosci. Remote Sens. 2010, 49, 488–499. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Superresolving SAR tomography for multidimensional imaging of urban areas: Compressive sensing-based TomoSAR inversion. IEEE Signal Process. Mag. 2014, 31, 51–58. [Google Scholar] [CrossRef]
- Adeli, S.; Akhoondzadeh Hanzaei, M.; Zakeri, S. Very High Resolution Parametric and Non-Parametric Sartomography Methods for Monitoring Urban Areas Structures. J. Geomat. Sci. Technol. 2019, 8, 1–11. [Google Scholar]
- Seker, I.; Lavalle, M. Tomographic Performance of Multi-Static Radar Formations: Theory and Simulations. Remote Sens. 2021, 13, 737. [Google Scholar] [CrossRef]
- D’Hondt, O.; López-Martínez, C.; Guillaso, S.; Hellwich, O. Nonlocal Filtering Applied to 3-D Reconstruction of Tomographic SAR Data. IEEE Trans. Geosci. Remote Sens. 2018, 56, 272–285. [Google Scholar] [CrossRef]
- Aghababaee, H.; Ferraioli, G.; Schirinzi, G.; Pascazio, V. Regularization of SAR Tomography for 3-D Height Reconstruction in Urban Areas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 648–659. [Google Scholar] [CrossRef]
- Lombardini, F.; Gini, F.; Matteucci, P. Application of array processing techniques to multibaseline InSAR for layover solution. In Proceedings of the 2001 IEEE Radar Conference (Cat. No.01CH37200), Atlanta, GA, USA, 3 May 2001; pp. 210–215. [Google Scholar] [CrossRef]
- Guillaso, S.; Reigber, A. Scatterer characterisation using polarimetric SAR tomography. In Proceedings of the International Geoscience and Remote Sensing Symposium, Seoul, Republic of Korea, 25–29 July 2005; Volume 4, p. 2685. [Google Scholar]
- Sauer, S.; Ferro-Famil, L.; Reigber, A.; Pottier, E. Polarimetric Dual-Baseline InSAR Building Height Estimation at L-Band. IEEE Geosci. Remote Sens. Lett. 2009, 6, 408–412. [Google Scholar] [CrossRef]
- Kong, L.; He, X.; Xu, X. A Fully-Polarized Unitary MUSIC for Polarimetric SAR Tomography. In Proceedings of the 2019 International Conference on Electromagnetics in Advanced Applications (ICEAA), Granada, Spain, 9–13 September 2019; pp. 0964–0967. [Google Scholar] [CrossRef]
- Ren, X.; Qin, Y.; Tian, L. Three-dimensional imaging algorithm for tomography SAR based on multiple signal classification. In Proceedings of the 2014 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Guilin, China, 5–8 August 2014; pp. 120–123. [Google Scholar] [CrossRef]
- Martín-del Campo-Becerra, G.D.; Serafín-García, S.A.; Reigber, A.; Ortega-Cisneros, S. Parameter selection criteria for Tomo-SAR focusing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 1580–1602. [Google Scholar] [CrossRef]
- Naghavi, A.; Fazel, M.S.; Beheshti, M.; Yazdian, E. A sequential MUSIC algorithm for scatterers detection in SAR tomography enhanced by a robust covariance estimator. Digit. Signal Process. 2022, 128, 103621. [Google Scholar] [CrossRef]
- Bamler, R.; Hartl, P. Synthetic aperture radar interferometry. Inverse Probl. 1998, 14, R1–R54. [Google Scholar] [CrossRef]
- Xu, G.; Gao, Y.; Li, J.; Xing, M. InSAR Phase Denoising: A Review of Current Technologies and Future Directions. IEEE Geosci. Remote Sens. Mag. 2020, 8, 64–82. [Google Scholar] [CrossRef] [Green Version]
- Guillaso, S.; D’Hondt, O.; Hellwich, O. SAR tomography with reduced number of tracks: Urban object reconstruction. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2919–2922. [Google Scholar] [CrossRef]
- Budillon, A.; Schirinzi, G. Support detection for SAR tomographic reconstructions from compressive measurements. Sci. World J. 2015, 2015, 949807. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, X.X.; Bamler, R. Very High Resolution Spaceborne SAR Tomography in Urban Environment. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4296–4308. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Dănișor, C.; Fornaro, G.; Pauciullo, A.; Reale, D.; Datcu, M. Super-resolution multi-look detection in SAR tomography. Remote Sens. 2018, 10, 1894. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Gokeda, G.; Yu, Y. Introduction to Direction-of-Arrival Estimation; Artech House: London, UK, 2010. [Google Scholar]
- Foutz, J.; Spanias, A.; Banavar, M.K. Narrowband direction of arrival estimation for antenna arrays. Synth. Lect. Antennas 2008, 3, 1–76. [Google Scholar]
- Omati, M.; Sahebi, M.R.; Aghababaei, H. Evaluation of nonparametric SAR tomography methods for urban building reconstruction. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Pauciullo, A.; De Maio, A.; Perna, S.; Reale, D.; Fornaro, G. Detection of Partially Coherent Scatterers in Multidimensional SAR Tomography: A Theoretical Study. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7534–7548. [Google Scholar] [CrossRef]
- Budillon, A.; Schirinzi, G. GLRT Based on Support Estimation for Multiple Scatterers Detection in SAR Tomography. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1086–1094. [Google Scholar] [CrossRef]
- Hansen, M.H.; Yu, B. Model Selection and the Principle of Minimum Description Length. J. Am. Stat. Assoc. 2001, 96, 746–774. [Google Scholar] [CrossRef]
- Ferretti, A.; Bianchi, M.; Prati, C.; Rocca, F. Higher-order permanent scatterers analysis. EURASIP J. Adv. Signal Process. 2005, 2005, 609604. [Google Scholar] [CrossRef] [Green Version]
- Fornaro, G.; Lombardini, F.; Serafino, F. Three-dimensional multipass SAR focusing: Experiments with long-term spaceborne data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 702–714. [Google Scholar] [CrossRef]
- Tihonov, A.N. Solution of incorrectly formulated problems and the regularization method. Soviet Math. 1963, 4, 1035–1038. [Google Scholar]
- Jolliffe, I.T. Principal Component Analysis, 2nd ed.; Springer: New York, NY, USA, 2002. [Google Scholar] [CrossRef]
- Craddock, J.M.; Flood, C.R. Eigenvectors for representing the 500 mb geopotential surface over the Northern Hemisphere. Q. J. R. Meteorol. Soc. 1969, 95, 576–593. [Google Scholar] [CrossRef]
- Farmer, S.A. An Investigation into the Results of Principal Component Analysis of Data Derived from Random Numbers. J. R. Stat. Soc. Ser. (Stat.) 1971, 20, 63–72. [Google Scholar] [CrossRef]
- Hadj-Rabah, K.; Schirinzi, G.; Daoud, I.; Hocine, F.; Belhadj-Aissa, A. Spatio-Temporal Filtering Approach for Tomographic SAR Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–13. [Google Scholar] [CrossRef]
- Vaid, K.; Ghose, U. Predictive Analysis of Manpower Requirements in Scrum Projects Using Regression Techniques. Procedia Comput. Sci. 2020, 173, 335–344. [Google Scholar] [CrossRef]
- Liu, W.; Budillon, A.; Pascazio, V.; Schirinzi, G.; Xing, M. Performance Improvement for SAR Tomography Based on Local Plane Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 2298–2310. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1. 2014. Available online: http://cvxr.com/cvx (accessed on 13 March 2023).
- Grant, M.; Boyd, S. Graph implementations for nonsmooth convex programs. In Recent Advances in Learning and Control; Blondel, V., Boyd, S., Kimura, H., Eds.; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2008; pp. 95–110. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Quantity | |
|---|---|---|
| Data Set 1 | Data Set 2 | |
| Site | Barcelona (Spain) | |
| Acquisition mode | StripMap | |
| Wavelength | 0.031 (m) | |
| View angle | 35° | |
| Range Distance | 618 (km) | |
| Baseline Spam | 157.74 (m) | 506.32 (m) |
| Rayleigh Elevation resolution | 60.80 (m) | 18.94 (m) |
| Height resolution | 34.88 (m) | 10.87 (m) |
| Number of images | 9 | 28 |
| l | |||
|---|---|---|---|
| 2 | 42.1279 | 3.1282 | 38.9998 |
| 3 | 3.1282 | 0.8589 | 2.2692 |
| 4 | 0.8589 | 0.6460 | 0.2129 |
| 5 | 0.6460 | 0.4669 | 0.1791 |
| 6 | 0.4669 | 0.1017 | 0.3651 |
| 7 | 0.1017 | 0.1222 | 0.0204 |
| 8 | 0.1222 | 0.0928 | 0.0294 |
| value | 88.89 |
| Method | ||||
|---|---|---|---|---|
| Data Set 1 | Data Set 2 | Data Set 1 | Data Set 2 | |
| Classical MUSIC | 0.0734 | 0.8169 | 0.8309 | 0.1029 |
| BIC-MUSIC | 0.2150 | 0.2502 | 0.7476 | 0.2717 |
| Minimum-Norm | 0.0513 | 0.2528 | 0.8422 | 0.3765 |
| Regularized Minimum-Norm | 0.0874 | 0.3429 | 0.7811 | 0.2627 |
| Proposed MUSIC | 0.2246 | 0.8821 | 0.7002 | 0.0806 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hadj-Rabah, K.; Schirinzi, G.; Budillon, A.; Hocine, F.; Belhadj-Aissa, A. Non-Parametric Tomographic SAR Reconstruction via Improved Regularized MUSIC. Remote Sens. 2023, 15, 1599. https://doi.org/10.3390/rs15061599
Hadj-Rabah K, Schirinzi G, Budillon A, Hocine F, Belhadj-Aissa A. Non-Parametric Tomographic SAR Reconstruction via Improved Regularized MUSIC. Remote Sensing. 2023; 15(6):1599. https://doi.org/10.3390/rs15061599
Chicago/Turabian StyleHadj-Rabah, Karima, Gilda Schirinzi, Alessandra Budillon, Faiza Hocine, and Aichouche Belhadj-Aissa. 2023. "Non-Parametric Tomographic SAR Reconstruction via Improved Regularized MUSIC" Remote Sensing 15, no. 6: 1599. https://doi.org/10.3390/rs15061599