1. Introduction
Over the past decade, the Global Navigation Satellite System (GNSS), represented by GPS, GLONASS, BeiDou and Galileo, has been the primary means of providing navigation and positioning services. However, GNSS is inherently defected by low received signal power and is easily blocked resulting in frequent service interruptions or even unavailability in challenging environments. Therefore, improving GNSS performance in complex environments has been the main driving force for the development of satellite navigation technology.
Nowadays, various Satellite-Based Augmentation Systems (SBAS) have been successively proposed which can be divided into information enhancement and signal enhancement [
1,
2]. Information enhancement aims to improve positioning accuracy and reliability by broadcasting error correction in GNSS observations and integrity information to users. It does not provide additional measurements. Typical systems include the Wide Area Augmentation System (WAAS), and the BeiDou regional correction broadcasted by the Geostationary Earth Observation satellites [
3]. Nevertheless, since they generally use medium or high-orbit satellites, the availability of location services in complex environments has not been ensured.
In contrast, signal enhancement can provide additional measurement to GNSS signals and improve positioning availability by increasing measurement redundancy. Low Earth Orbit (LEO) satellites are a typical representation of signal enhancement, possessing ideal properties for aiding GNSS positioning in complex environments. Specifically, LEO is about 20 times closer to the earth, making the received signal power 30 dB higher than GNSS signals and less susceptible to interference. Furthermore, companies such as OneWeb, SpaceX, and Telesat plan to deploy tens of thousands of broadband internet satellites into space, increasing the number of LEO satellites significantly. Besides, each broadband provider deploys broadband internet satellites into specific constellations and broadcasts signals on different frequency bands, making LEO signals diverse in frequency and difficult to be targeted. Therefore, using LEO satellites for GNSS navigation enhancement, known as LEO enhanced GNSS (LeGNSS), has become a current research hotspot [
4,
5,
6,
7].
The working mode of LEO satellites in the LeGNSS can also be categorized into two types. The first is LEO navigation satellites, which broadcast dual-frequency pseudorange and carrier-phase observations. Leveraging the significant spatial geometry changes of LEO satellites in a short period, the correlation between equations across epochs is weakened, solving the problem of long initialization times for GNSS carrier-phase ambiguity in PPP. By designing different constellation configurations and the number of satellites, LeGNSS can shorten the PPP convergence time to seconds [
8,
9,
10]. However, according to [
11] existing broadband internet LEO constellations may not support pseudorange-based navigation for two reasons: First, due to cost constraints they will not carry atomic clocks. Second, they will not broadcast downlink signals that support pseudorange measurements through a calibrated connection between transmission time tags and transmitter clock time. Further, various PPP error models for LEO still adopt empirical models from GPS, so the research under this mode is still at the simulation stage.
Another mode of LEO is opportunistically to assist GNSS. Opportunistic fashion is a method of extracting useful observational information from public radio signals intended for non-navigation purposes, i.e., Signal-of-Opportunity (SOPs). Compared with the first mode, the opportunistic approach has additional advantages: (i) It protects the privacy of the user, as only the downlink LEO satellite signal is used without communicating back with the LEO; (ii) it has better universality, which can be extended to any number of LEO constellations without being limited to a single constellation [
12]. There are few studies using LEO satellites to assist GNSS opportunistically. The authors of [
13] combined Orbcomm (ORB) with GPSs, and analyzed the impact of different observation errors on positioning accuracy. Since the LEO clock error was not considered, the positioning accuracy was poor. The authors of [
14] proposed to use the Doppler measurement extracted from the Iridium single-tone signals combined with GPS for positioning, and a simple experiment was carried out. In particular, the following challenges should be considered when considering LEO as SOP beacons:
Limited information about LEO satellite signals is available. As [
15,
16] mentioned, broadband internet constellations such as Starlink generally do not disclose signal structure specifications to protect intellectual property. Therefore, it is difficult to construct pseudoranges by decoding pseudo-random sequences, and the typical measurement is Doppler;
The specific parameters for the LEO error model are unknown. Although the Doppler error model can be regarded as the time differential of the pseudorange correction model, its accurate equipment parameters and environmental parameters cannot be obtained. In addition, due to cost reduction, LEO onboard clocks use pace-qualified OCXO and TXCO, which are far less stable than GNSS atomic clocks [
17,
18]. Therefore, the LEO satellite clock drift cannot be ignored;
The uncertainty of LEO satellite orbits. As the LEO constellations do not have the massive network of ground stations that form the control segment of GNSS. The precise ephemeris of the LEO satellites is not broadcast or known. Although the North American Aerospace Defense Command (NORAD) makes publicly available estimates of Keplerian elements for LEO satellite orbits that are updated daily in two-line element (TLE) files. However, TLE is an inaccurate ephemeris. The satellite state calculated by TLE files has been proven to accumulate an error of one kilometer or more within a day [
19].
The differential framework was introduced to remove unmodeled common errors; performance in LEO constellations has been partially studied recently. The authors of [
20] proposed an altimeter-assisted Orbcomm carrier-phase double-difference (DD) framework. Using two Orbcomms, the 2D position error of the user station reaches 11.93 m after waiting for 114 s. Since the Iridium signals use TDMA/FDMA modulation, the authors of [
21] used Iridium as the SOP beacon and measured TDOA and FDOA as the observation. However, the Iridium downlink code rate is only 25 kHz, and the measurement accuracy of TDOA is limited. Finally, the 2D positioning accuracy reaches 29.1 m within 50 min. The authors of [
22] proposed to construct the line-of-sight vector in the Jacobian matrix by measuring the AOA of the LEO signal, thereby circumventing orbital error on positioning accuracy. However, AOA requires complex antenna arrays to obtain accurate relative azimuth angles. The authors of [
23] presented the preliminary results of differential Doppler positioning using Starlink satellites, and designed a Doppler tracking algorithm based on a generalized likelihood ratio (GLR) detector. Under the 1 km and 9 m baselines, the user’s 2D position error is 5.6 m and 2.6 m, respectively. The authors of [
24] developed a navigation framework with carrier-phase differential measurements from the mega-constellation LEO satellites. The simulation results showed that using 44 Starlink satellites, an unmanned aerial vehicle (UAV) achieved a 3D position RMSE of 2.2 m, and a 2D RMSE of 32.4 cm. However, this precision comes at the cost of added ambiguities that need to be resolved. Moreover, in a complex environment the carrier-phase is prone to cycle slip and loss of lock, resulting in frequent initialization of ambiguities. In contrast, LEO Doppler information has better availability.
This paper proposes a Differential-LEO opportunistically enhanced GNSS (D-LoeGNSS) navigation framework when there is an insufficient number of GNSS satellites and evaluates the performance of the framework. A reference station whose state is known a priori and an unknown user station observes GNSS and LEO simultaneously. Compared with the single system which has to observe for a long time until the satellite geometry changes sufficiently, LoeGNSS can effectively improve the availability and real-time performance of the system. The main contributions of this paper are as follows:
The influence of atmospheric delay on LEO Doppler measurement is analyzed;
A D-LoeGNSS navigation framework is proposed to remove unknown satellite clock errors and atmospheric delays with spatial correlation, and the measurement residuals caused by LEO ephemeris errors are derived;
Based on the orthogonal transformation [
24], we proposed a householder-based D-LoeGNSS algorithm (HB-DLG) for the problems of high measurement noise correlation and prominent noise in DD. The noise amplification caused by the difference is suppressed by introducing an orthogonal matrix;
Since the GNSS pseudorange and the LEO Doppler are heterogeneous measurements, DOP is unsuitable for characterizing positioning accuracy. Although [
11,
25,
26] proposed the concept of generalized GDOP, which unifies the units of Doppler and pseudorange by normalizing the scale factor, whose computational complexity is high. Considering that the measurements error after difference only contains white noise, which satisfies the assumption of unbiased estimation, the Cramer Rao Lower Bound (CRLB) is introduced into the difference-system. We derived the CRLB of HB-DLG as a metric reflecting the spatial distribution of satellites in the LoeGNSS constellation and the positioning accuracy.
The rest of the paper is organized as follows:
Section 2 presents the principles and methods.
Section 2.1 presents the D-LoeGNSS framework.
Section 2.2 describes the D-LoeGNSS framework single difference (SD) measurement model. To remove the receiver clock bias and clock drift,
Section 2.3 describes the D-LoeGNSS framework DD measurement model and the problem of noise amplification.
Section 2.4 presents the HB-DLG measurement model.
Section 2.5 derives the CRLB as the positioning accuracy evaluation metric for the LoeGNSS constellation. In
Section 3, we take Orbcomm and GPS as examples to conduct field experiments and present the results of the D-LeoGNSS framework. Finally, the conclusion is given in
Section 4.
2. Principles and Methods
This section presents the D-LeoGNSS framework and its measurement model. In particular, the influence of atmospheric delay on LEO Doppler measurement was analyzed. Then, the measurement residuals caused by LEO ephemeris errors were derived. Given the HB-DLG measurement model, we derived the CRLB as the positioning accuracy evaluation metric for the LoeGNSS constellation.
2.1. D-LoeGNSS Framework Description
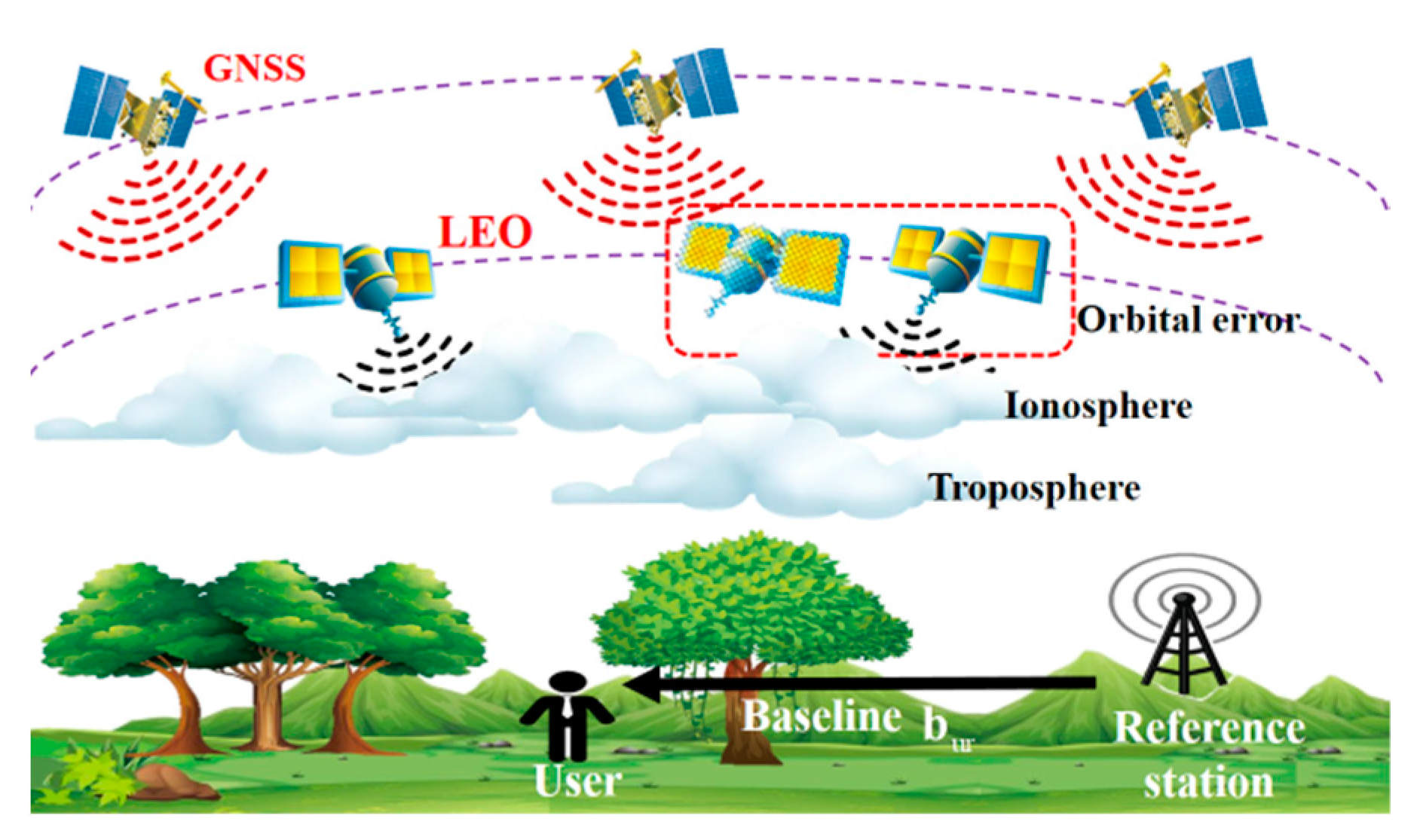
The framework consists of a reference station with a known position and a user station, operating in space composed of
M (
) GNSS satellites and
N (
) LEO satellites. Each station simultaneously measures LEO and GNSS. The reference broadcasts its position, GNSS/LEO satellite state, and GNSS pseudorange/LEO Doppler measurements to the user. The GNSS satellite identification is determined by the cyclic convolution of the local C/A code sequence and the acquisition signal. For LEO, this can be accomplished by allowing the user and reference to first learn about their operating environment with preloaded information. For example, each LEO corresponds to a specific earth coverage area at a given time, and its orbital information can be predicted by preloading the TLE file combined with the SGP4 model [
27]. Therefore, the preliminary screening of satellites is completed by detecting whether the satellite coverage area intersects with the reference station area. Afterwards, the Doppler measurements at the reference are matched with the theoretical Doppler to complete the LEO satellite identification. For the Orbcomm constellation, each satellite broadcasts signals in its own two specific frequency bands so that the satellites can be determined through spectral scanning. Once the satellites are identified, the receiver can calculate satellite orbital information at any given time through the SGP4 model.
In particular, to remove unknown satellite clock errors, atmospheric delays, and orbital errors in LEO measurements, we used a difference framework containing SD and DD. To suppress the noise amplification and correlation in DD, the HB-DLG measurement model was proposed. The experimental scene is shown in
Figure 1.
2.2. D-LoeGNSS Framework Single Difference Measurement Model
2.2.1. Effect of Ionospheric Change Rate on LEO Doppler Measurements
The ionosphere is a dispersive medium for electromagnetic waves, ranging from 60 to 2000 km above the earth’s surface [
28]. GNSS orbits are typically higher than 2000 km, and GNSS signals tracked by ground receivers penetrate all ionospheres. Ionospheric effects are mainly determined by the total electron content (TEC), whereas most LEO satellites orbit between 500 and 1500 km, i.e., within the ionosphere. Compared to GNSS, which is affected by the entire TEC, LEO satellites are only affected by the bottom TEC [
29]. Since the specific bottom TEC parameter is unknown, we analyzed the impact of the ionosphere on LEO Doppler using the GPS empirical model. According to [
29,
30], the ionospheric delay in the pseudorange in meters is:
where
is the carrier frequency of satellite
i,
is the proportionality constant which reads:
where
are the electron charge, mass, and radius, respectively; c is the vacuum speed of light and
is the vacuum permittivity. The value of the constant is approximately
≈ 40.308193 m
3·s
−2 [
31].
is expressed vertical total electron content of satellite
i and is assumed to be constant during satellite visibility,
indicates the elevation angle of satellite
i relative to the user, and
is the obliquity factor of satellite
i, namely:
where R
e = 6368 km is the average radius of the earth,
h is the mean ionospheric height, generally 350 km. As the Doppler can be regarded as the time derivative of pseudorange pairs, then:
According to (3), the ionospheric change rate is positively correlated with the elevation change rate and inversely proportional to the square of the satellite carrier frequency. We simulated GPS PRN2, Starlink 4272, and Orbcomm FM114 satellites as examples. GPS, Starlink, and Orbcomm use the L1 frequency band, 11.325 GHz and 137.5 MHz, respectively. Since the typically visible period for LEO was around 10 min, we used STK to obtain satellite states; the simulation step was set to 1 s and the cutoff elevation angle was 15 deg. Specific meteorological parameters are provided in [
32,
33]. The results are shown in
Figure 2.
In
Figure 2, although the specific values of the ionospheric change rate may differ from the actual situation, due to the high carrier frequency of GPS and the elevation changes slowly, the influence of the ionospheric change rate can be ignored. Starlink has the highest signal frequency, even its elevation angle changes rapidly, the ionospheric change rate value is slightly higher than the GPS. The Orbcomm signal was most affected by the ionosphere change rate since it had the lowest frequency with quick changes in the elevation angle.
2.2.2. Effect of Tropospheric Change Rate on LEO Doppler Measurements
The troposphere is the atmosphere extending from the ground to 50 km, and is a non-dispersible medium. Both LEO and GNSS were affected by the troposphere. The troposphere is divided into two components called dry and wet delay. To analyze the change rate of tropospheric delay, we used the Hopfield model as an example:
where
is the zenith tropospheric delay;
and
is the dry delay and wet delay, respectively:
In (5),
P is the local atmospheric pressure in mPa,
T represents temperature in Kelvin,
represent the heights of the dry and wet atmospheric layers, respectively. Additionally, it recommends the following empirical values:
is vapor pressure, and
RH represents relative humidity. The zenith tropospheric delay component is multiplied by the corresponding obliquity factors to characterize the tropospheric delay and change rate in the direction of signal transmission:
The obliquity factors are:
Finally, the tropospheric delay and its change rate for GPS, Starlink, and Orbcomm are shown in
Figure 3. Note that the measured values for the change rate were obtained by differencing the tropospheric delays for adjacent epochs.
In
Figure 3, the change rate of the tropospheric delay for Orbcomm and Starlink was greater than that of the GPS, but their magnitudes were still small. In particular, Orbcomm was more affected by the ionosphere than the troposphere.
2.2.3. Single Difference Measurement Model
LEO is equipped with a pace-qualified OCXO or temperature-compensated crystal oscillator (TCXO) as the onboard clock, whereas its specific clock parameters cannot be obtained, therefore, we introduced difference method into the LoeGNSS constellation to remove the satellite clock error. We took the i-th GNSS pseudorange observation and j-th LEO Doppler observation as an example:
where the subscript
and
refer to LEO and GNSS, respectively. i and j refer to the given satellites. The subscripts u and r correspond to the user and reference station, respectively.
and
indicate the measured pseudorange and Doppler, respectively.
and
represent the geometric range and range rate between the satellite and the receiver, respectively.
,
, and
,
denote the ionospheric and tropospheric delay and their change rate, respectively.
and
are the clock bias between the receiver and the GNSS satellite.
and
are the clock drifts between the receiver and the LEO satellite.
,
and
,
are the corresponding GNSS pseudorange measurement error and LEO Doppler measurement error at the reference and user station, which obey the
and
, respectively. By differencing the corresponding terms, we obtain:
Assuming that the line-of-sight vectors from the user and the reference station to the satellite were parallel to each other.
is approximated as the projection of the baseline vector
on the normalized line-of-sight vector
at the reference. Finally, the relationship between the bur and the SD measurements of the LoeGNSS constellation is obtained:
Using inter-station difference, the unknown change rate of atmospheric delay and satellite clock drift in LEO measurements were removed.
2.2.4. Effect of LEO Orbit Error on the Measurement Model
The GNSS satellite state can be calculated using orbit interpolation with the real-time ephemeris issued by IGS, and its orbit accuracy is meter level [
2,
30]. The Kepler parameters of LEO are available through TLE files. Nevertheless, according to [
12], satellite orbit errors calculated using TLE can accumulate to the order of kilometers. Therefore, it is necessary to consider the influence of ephemeris error on differential positioning accuracy.
According to (10) we have:
is the position vector of the i-th GNSS satellite.
and
are the position vectors of the user and the reference, respectively. Assume that there is a perturbation error
in the satellite position obtained from the extrapolation of IGS ephemeris parameters, namely
, where
is the true satellite position. Let
be first-order Taylor expansion at point
:
Likewise
, and:
That is, when the GNSS satellite has an orbit error , it will cause a deviation in the pseudorange differential measurement .
Similarly the first-order Taylor expansion of
at point
is:
thus
Namely in the LEO Doppler difference model, the satellite orbit error will not only cause the measurement deviation of , but also the corresponding velocity error will cause . In particular, in short baseline (for LEO constellation the short baseline range is no more than 1 km), , , the orbital error is removed.
2.3. D-LoeGNSS Framework Double-Difference Measurement Model
Although SD can eliminate common errors with spatial correlation, receiver clock bias and clock drift introduced by GNSS and LEO still exist. To this end, a common method is DD. Without loss of generality, the first satellite of each system is taken as the reference satellite. Assuming that the user is stationary, the LoeGNSS DD measurements are yielded:
In (17), DD removes the receiver clock term at the cost of sacrificing one measurement equation for each system. We define the DD permutation matrices:
and
are all 1-element column vectors of order
and
, respectively.
and
are
and
identity matrices. Then:
We define the SD noise matrices
and
. The DD noise matrices
,
. According to the law of propagation of variance:
where
is the covariance coefficient matrix. Compared to SD, DD further amplifies noise while introducing a correlation between noise.
2.4. Householder-Based Differential LoeGNSS Measurement Model (HB-DLG)
To remove the receiver clock term and circumvent the problem of prominent noise. We introduced the householder transformation matrix into the SD, and performed QR decomposition on the coefficient matrix of the receiver clock item. Assuming the user is stationary, according to (11), the matrix form of the LoeGNSS single difference equation is:
Constructing householder unitary matrices
and
, respectively. Such that:
let
,
, then
Dividing the P matrix into two parts, where
is the first row of the matrix P, and
. Similarly,
,
. Left by multiplying
and
by (21) gives:
In (24), the parts containing
and
are both restricted to the first row of the respective measurement equations. We extracted the part where the clock coefficient was 0 respectively, then:
In the model above, only the unknown baseline vector
was included in the transformed equation. To obtain a unique least-square solution requires that:
In addition, according to the unitary matrix property, its noise covariance matrix is:
Comparing (20) and (27), the HB-DLG algorithm can remove the common clock term without changing the statistical properties of the measurement noise.
Note that in (25),
,
, which means the Doppler Jacobian matrix has been normalized twice more than the pseudorange, resulting in the condition number of the combined Jacobian matrix
exceeding
and exhibiting ill-conditioned. To increase the numerical stability, we can multiply (25) by the scaling factor
, making the elements in the Jacobian matrix in the same order of magnitude, i.e.:
2.5. Performance Evaluation of HB-DLG Measurement Model Based on CRLB
In GNSS, by assuming that measurement noise is independent and identically (i.i.d) distributed Gaussian white noise, the geometric dilution of precision (GDOP) can serve as a metric of satellite geometry that is independent of the measurement precision. However, in the D-LoeGNSS framework, pseudorange and Doppler are heterogeneous measurements. Although it is possible to assume that the noise in the pseudorange and Doppler are unbiased and independent after SD, the identically distributed does not hold. Therefore, the same derivation does not apply to the current environment.
For parameter–estimation problems, CRLB establishes a lower bound for the variance of any unbiased estimator, i.e., it is impossible to obtain an unbiased estimator with a variance lower than this bound, and provides a standard for comparing the performance of unbiased estimators. In this paper, the user’s positioning error distribution performance is the CRLB. By deriving the CRLB, the theoretical best performance of positioning accuracy under the current environmental parameters can be obtained.
As mentioned above, the difference operation can eliminate the unknown common errors in measurement. Therefore, the measurement residuals only contain noise, and we can derive the CRLB for HB-DLG. We rewrite (28) as follows:
where
. First deriving the CRLB that does not contain the
part in (29):
Set the measurement vector as
. Correspondingly,
. The joint probability density function (pdf) is:
then
and
take the negative expectation operator for (35):
The Fisher information matrix is:
Referring to the Fisher information matrix (38) derived from (30), the Fisher information matrix of (29) is obtained:
Finally, the positioning error variance of the D-LoeGNSS framework satisfies:
Therefore, (40) can be used as an evaluation metric of D-LoeGNSS positioning error. In addition, for a given theta, CRLB can also reflect the spatial geometric distribution of different satellite combinations.
4. Conclusions
For the insufficient number of GNSS satellites available in complex environments, we considered the LoeGNSS scheme. Based on this scheme, this paper proposed the D-LoeGNSS framework to eliminate the unknown LEO clock error and atmospheric delay variation rate, and deduced the influence of orbit error on the differential measurement model. To address the noise amplification and correlation in DD, the HB-DLG algorithm was proposed which can suppress noise and remove the receiver clock error by introducing an orthogonal matrix. Since the LEO Doppler and GNSS pseudorange are heterogeneous observations, the DOP becomes unsuitable. Thus, the CRLB of HB-DLG was derived as a new evaluation metric.
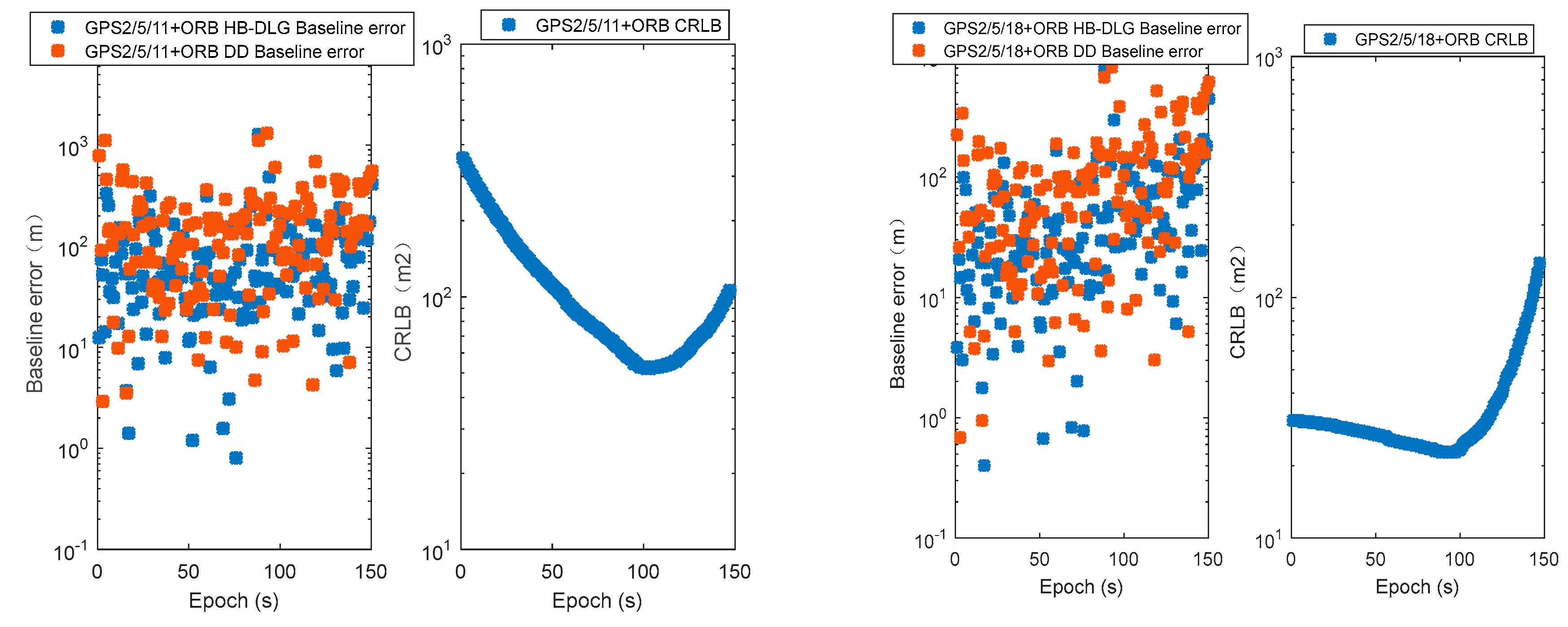
The experiment was carried out by combining Orbcomm with GPS at Beihang University. Experimental results showed that in single-epoch positioning we took satellite combinations of 3 GPS+2 Orbcomms as an example. Compared with DD, using the proposed HB-DLG improved the positioning accuracy of the corresponding satellite combinations by 49.6%, 45.0%, 20.8%, 17.4%, 21.9%, 13.4%, 0.4%, 46.7%, 5.9%, and 50.8%, respectively. Moreover, due to the high-speed movement of LEO satellites, in GPS 2/5/29+2 Orbcomm, GPS 2/11/18+2 Orbcomm, GPS 2/11/29+2 Orbcomm, GPS 2/18/29+2 Orbcomm, GPS 5/11/18+2 Orbcomm, and GPS 5/18/29+2 Orbcomm satellite combinations, CRLB reflected the accuracy degradation due to the deterioration of satellite distribution. To improve observation redundancy and the number of visible satellites, the positioning error and CRLB of only three GPSs, only 2 Orbcomms, and 3 GPS+2 Orbcomms by epoch accumulation were verified, respectively. Due to the correlation between epochs, only three GPS combination effects were insignificant, and its positioning accuracy remained on the order of hundreds of meters. Only two Orbcomm combinations can converge after 90 s, and its RMSE was reduced from 3.2104 × 103 to 45.47 m. The 3 GPS+2 Orbcomm epoch accumulation schemes can converge after 20 s and had the highest positioning accuracy. In particular, the RMSE was 7.03 m in GPS 11/18/29+2 Orbcomm. Meanwhile, there was no phenomenon of decreased positioning accuracy in the epoch accumulation scheme.
Future work will investigate the impact of orbit error on long-baseline positioning and mega-constellation-assisted GPS carrier-phase differential positioning.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}