




Compression of GNSS Data with the Aim of Speeding up Communication to Autonomous Vehicles


Abstract
1. Introduction
2. Background
2.1. Autonomous Vehicles
2.2. Data Compression
2.3. Global Navigation Satellite System
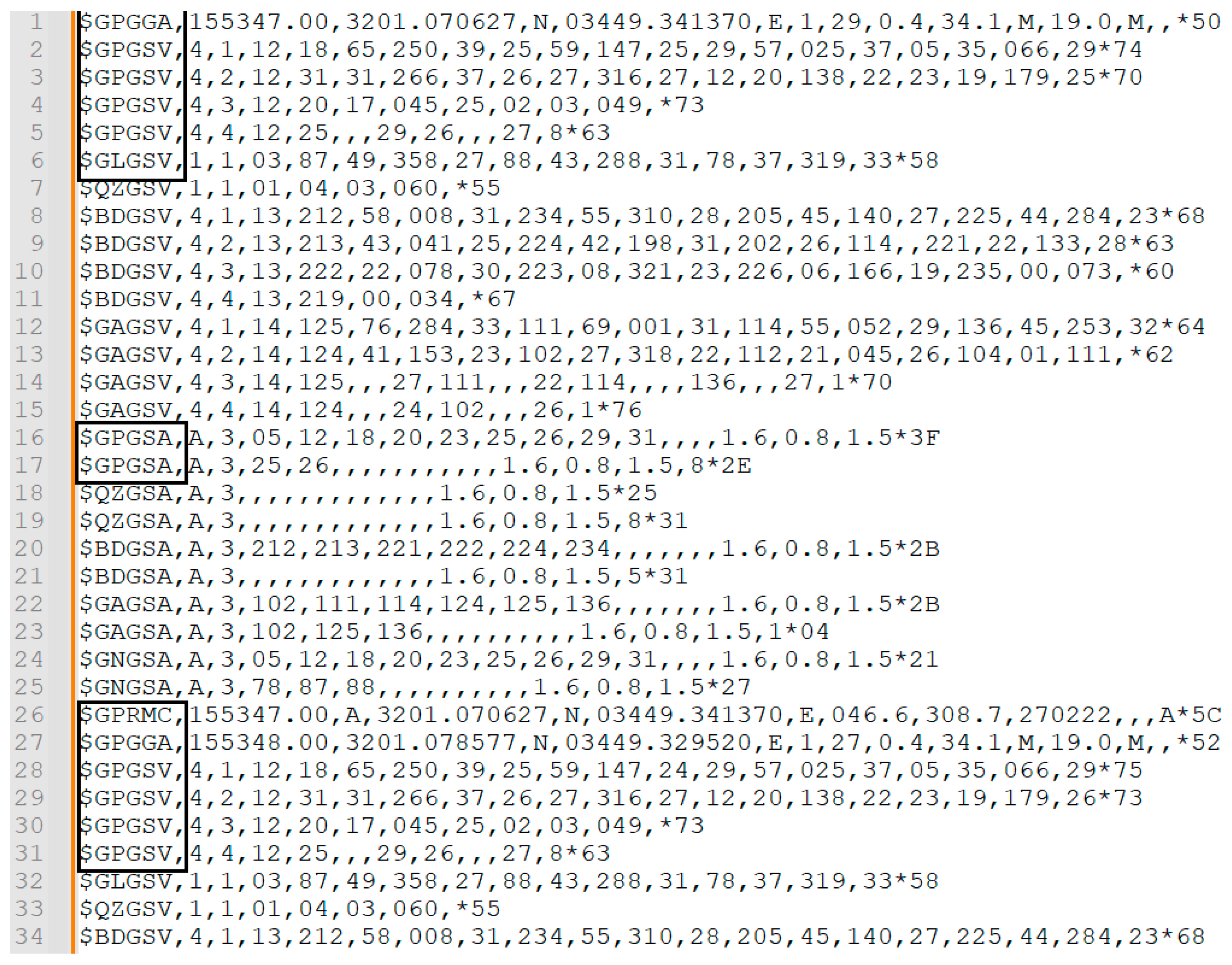
2.4. NMEA Standard
- GPGGA—fix information
- GPGSV—detailed satellite data
- GPRMC—recommended minimum data for GNSS.
- GPGSA—overall satellite data
3. GNSS Data Compression Review and Related Work
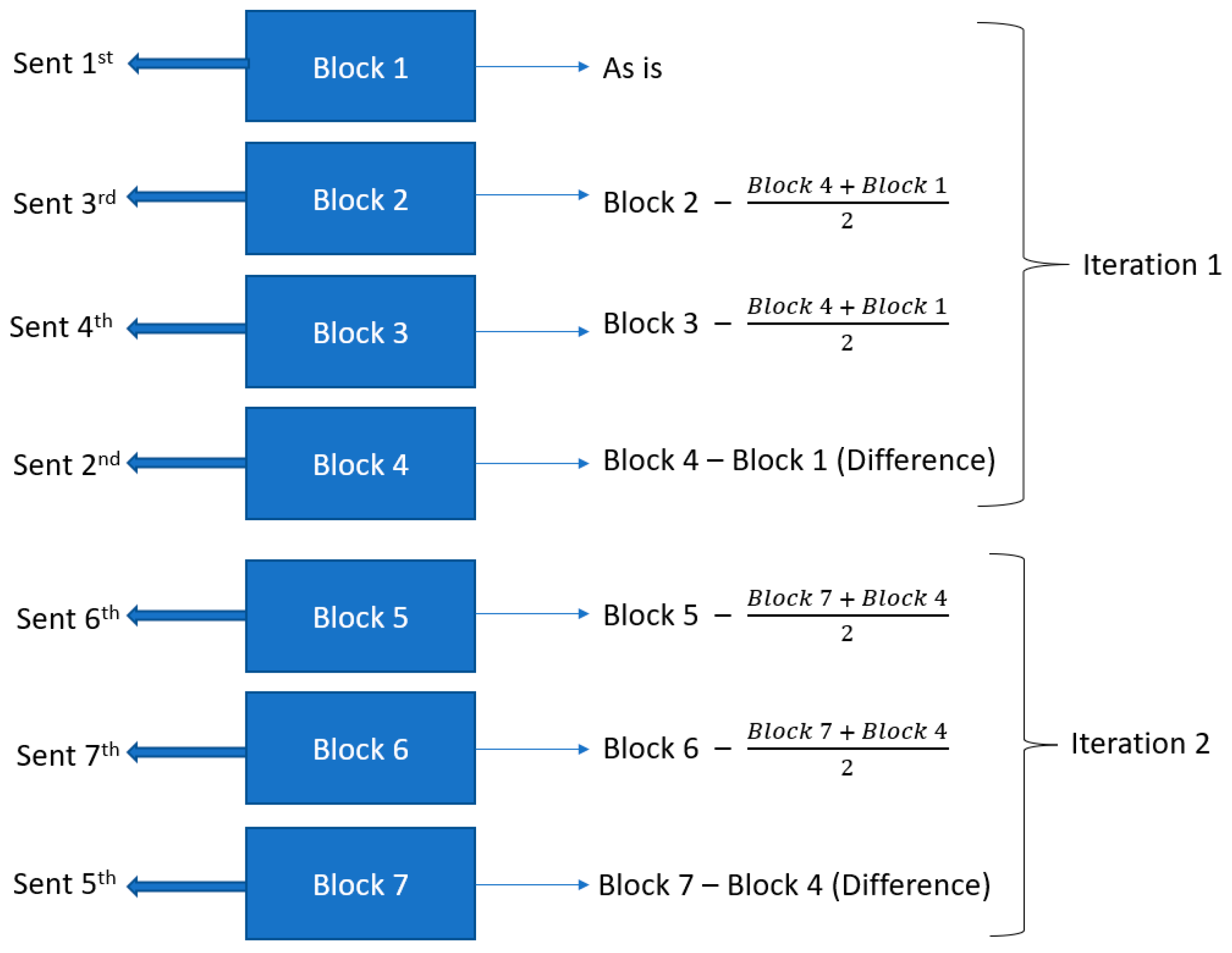
4. Employing H.264-Like Compression
5. Methodology
| Algorithm 1: Compression GNSS data |
| Input: Raw GNSS data Output: compressed binary data
(V=invalid data).
|
| Algorithm 2: Decompression GNSS data |
| Input: compressed binary data Output: Decompressed GNSS data
|
6. Experiments
- GPGGA
- GPGSV
- GPGSA
- GPRMC
- 5 ≤ k ≤ 13.
- GPGGA is a 1-line message.
- GPGSV is 1–9 lines of messages.
- GPGSA is 2-lines of messages.
- GPRMC is a 1-line message.
- AVG EXAMPLE → (4 + 1)/2
- 1,2,3 = 1
- 1,2,3,4 = 4
- 1,2,3, EOL,4 = avg
- Or vice versa
- AVG EXAMPLE → (4 + 1)/2
- 1,2,3,4 = 1
- 1,2,3 = 4
- 1,2,3 = avg
- AVG → (4 + 1)/2 (4 on the left, 1 on the right)
- 3,6,9, , = 1
- 1,2,3,4 = 4
- 2,4,6,#4 (complete to the left side of 4)
- Or vice versa:
- AVG → (4 + 1)/2 (4 on the left, 1 on the right)
- 3,6,9,5, = 1
- 1,2,3, , = 4
- 2,4,6, -#5 (minus means the number after # put on the right side of 1)
- AVG → (4 + 1)/2
- 3,6,9 = 1
- 1,2,3,4,5,6,7 = 4
- 2,4,6, EOL,4,5,6,7 (once we see EOL we put all the info after EOL to left side of 4)
- AVG → (4 + 1)/2 (4 on the left, 1 on the right)
- 3,6,9,1,2,4 = 1
- 1,2,3,4 = 4
- 2,4,6
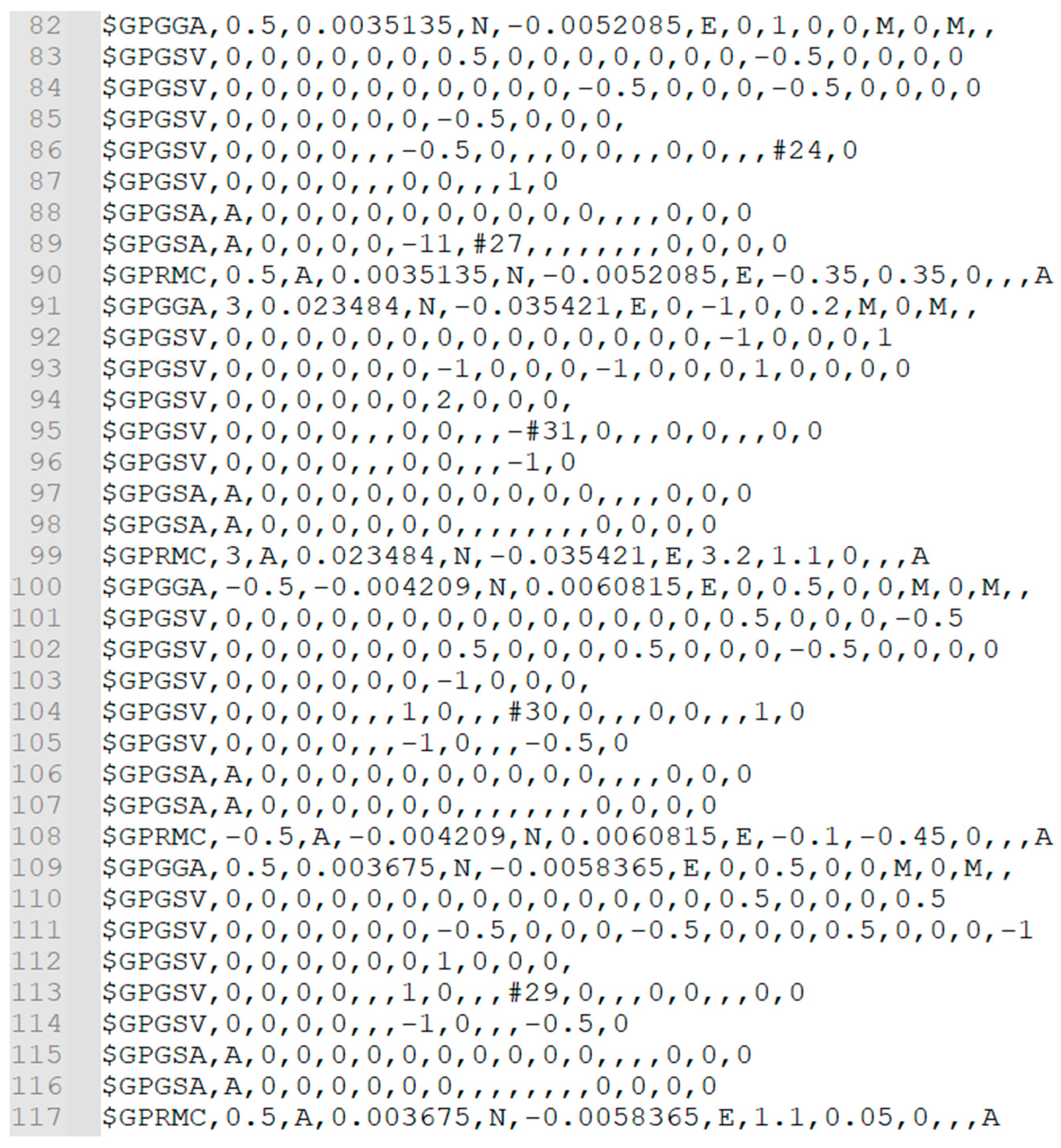
- After receiving the different file in Figure A6 in Appendix A, the algorithm prepares a file that contains very long prefixes that usually repeat in various files. Our algorithm maps each of these prefixes with a distinct symbol.
- The algorithm takes the output file from step 1 and executes a mapping file, creating a Huffman encoding for the file from step 1.
- For encoding:
- Load text file (GNSS logs).
- Create a difference file based on the H.264-like algorithm.
- For first run:
- Generate prefix configuration file.
- From a mapping file.
- Produce Huffman configuration file.
- Execute Huffman coding algorithm (creates .bin file)
- For decoding:
- e.
- Load Huffman coding file (the .bin file)
- f.
- Decode bin file using Huffman algorithm.
- g.
- Execute reversed difference file based on the H.264-like algorithm.
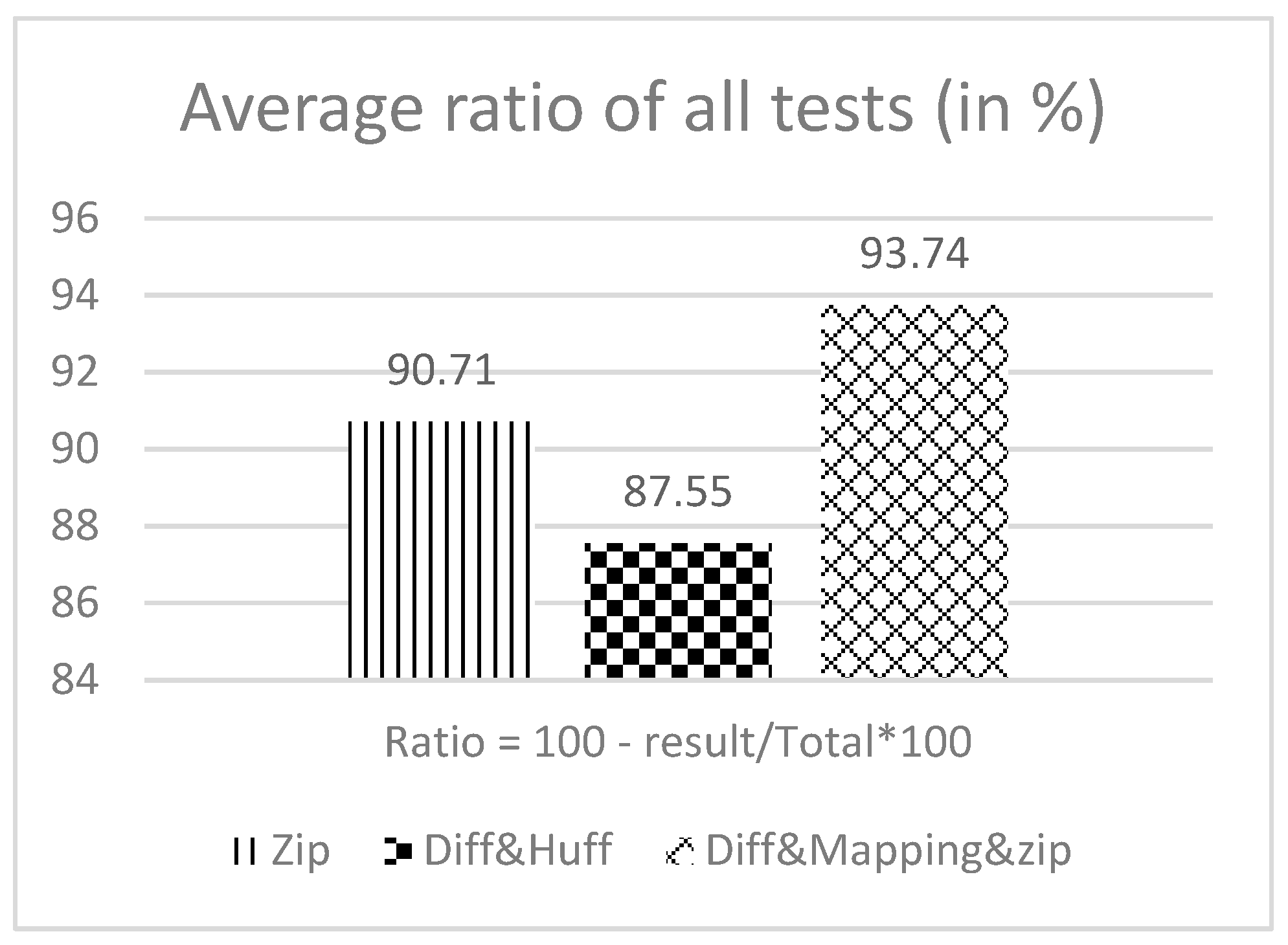
7. Results
- The difference method is based on H.264.
- Mapping.
- Huffman coding.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A






Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Frequency | Huffman Coding | Num of Bits | Space Savings (Bits) | Saved Bits | Freq × Num of Bits | Entropy |
|---|---|---|---|---|---|---|---|
| 0 | 193,868 | 010 | 3 | 193,868 × 8 − 193,868 × 3 = 969,340 | 969,340 | 581,604 | 0.3401972807 |
| % | 128,388 | 1011 | 4 | 128,388 × 8 − 128,388 × 4 = 513,552 | 513,552 | 513,552 | 0.2663735204 |
| - | 97,393 | 0110 | 4 | 97,393 × 8 − 97,393 × 4 = 389,572 | 389,572 | 389,572 | 0.2229590946 |
| 1 | 91,188 | 0010 | 4 | 91,188 × 8 − 91,188 × 4 = 364,752 | 364,752 | 364,752 | 0.2134148223 |
| , | 82,150 | 11110 | 5 | 82,150 × 8 − 82,150 × 5 = 246,450 | 246,450 | 410,750 | 0.1989196096 |
| ¦ | 81,703 | 11101 | 5 | 81,703 × 8 − 81,703 × 5 = 245,109 | 245,109 | 408,515 | 0.1981833350 |
| © | 74,786 | 11010 | 5 | 74,786 × 8 − 74,786 × 5 = 224,358 | 224,358 | 373,930 | 0.1865413311 |
| 2 | 61,997 | 10011 | 5 | 61,997 × 8 − 61,997 × 5 = 185,991 | 185,991 | 309,985 | 0.1636685171 |
| 5 | 52,276 | 10000 | 5 | 52,276 × 8 − 52,276 × 5 = 156,828 | 156,828 | 261,380 | 0.1449276078 |
| 3 | 49,158 | 01110 | 5 | 49,158 × 8 − 49,158 × 5 = 147,474 | 147,474 | 245,790 | 0.1386305132 |
| y | 41,594 | 111110 | 6 | 41,594 × 8 − 41,594 × 6 = 83,188 | 83,188 | 249,564 | 0.1226949237 |
| < | 38,094 | 111000 | 6 | 38,094 × 8 − 38,094 × 6 = 76,188 | 76,188 | 228,564 | 0.1149702278 |
| I | 35,174 | 110010 | 6 | 35,174 × 8 − 35,174 × 6 = 70,348 | 70,348 | 211,044 | 0.1083353318 |
| F | 35,146 | 110001 | 6 | 35,146 × 8 − 35,146 × 6 = 70,292 | 70,292 | 210,876 | 0.1082708225 |
| > | 31,515 | 101001 | 6 | 31,515 × 8 − 31,515 × 6 = 63,030 | 63,030 | 189,090 | 0.0997533134 |
| 4 | 29,563 | 100101 | 6 | 29,563 × 8 − 29,563 × 6 = 59,126 | 59,126 | 177,378 | 0.0950422933 |
| r | 27,118 | 100010 | 6 | 27,118 × 8 − 27,118 × 6 = 54,236 | 54,236 | 162,708 | 0.0889993603 |
| § | 26,345 | 011111 | 6 | 26,345 × 8 − 26,345 × 6 = 52,690 | 52,690 | 158,070 | 0.0870539414 |
| 6 | 25,197 | 011110 | 6 | 25,197 × 8 − 25,197 × 6 = 50,394 | 50,394 | 151,182 | 0.0841320976 |
| ^ | 24,585 | 001111 | 6 | 24,585 × 8 − 24,585 × 6 = 49,170 | 49,170 | 147,510 | 0.0825579785 |
| # | 24,135 | 001101 | 6 | 24,135 × 8 − 24,135 × 6 = 48,270 | 48,270 | 144,810 | 0.0813930080 |
| ¤ | 23,174 | 001100 | 6 | 23,174 × 8 − 23,174 × 6 = 46,348 | 46,348 | 139,044 | 0.0788831806 |
| 9 | 22,641 | 000110 | 6 | 22,641 × 8 − 22,641 × 6 = 45,282 | 45,282 | 135,846 | 0.0774778937 |
| 7 | 22,606 | 000101 | 6 | 22,606 × 8 − 22,606 × 6 = 45,212 | 45,212 | 135,636 | 0.0773852757 |
| } | 22,419 | 000011 | 6 | 22,419 × 8 − 22,419 × 6 = 44,838 | 44,838 | 134,514 | 0.0768897164 |
| * | 22,347 | 000010 | 6 | 22,347 × 8 − 22,347 × 6 = 44,694 | 44,694 | 134,082 | 0.0766985905 |
| @ | 22,144 | 000001 | 6 | 22,144 × 8 − 22,144 × 6 = 44,288 | 44,288 | 132,864 | 0.0761587499 |
| 8 | 21,345 | 1111111 | 7 | 21,345 × 8 − 21,345 × 7 = 21,345 | 21,345 | 149,415 | 0.0740197954 |
| v | 19,685 | 1110010 | 7 | 19,685 × 8 − 19,685 × 7 = 19,685 | 19,685 | 137,795 | 0.0695006163 |
| t | 18,883 | 1101110 | 7 | 18,883 × 8 − 18,883 × 7 = 18,883 | 18,883 | 132,181 | 0.0672788481 |
| ú | 18,839 | 1101101 | 7 | 18,839 × 8 − 18,839 × 7 = 18,839 | 18,839 | 131,873 | 0.0671562004 |
| x | 18,544 | 1101100 | 7 | 18,544 × 8 − 18,544 × 7 = 18,544 | 18,544 | 129,808 | 0.0663318331 |
| ( | 17,649 | 1100110 | 7 | 17,649 × 8 − 17,649 × 7 = 17,649 | 17,649 | 123,543 | 0.0638082439 |
| ‘ | 16,978 | 1100000 | 7 | 16,978 × 8 − 16,978 × 7 = 16,978 | 16,978 | 118,846 | 0.0618932344 |
| ô | 16,539 | 1010110 | 7 | 16,539 × 8 − 16,539 × 7 = 16,539 | 16,539 | 115,773 | 0.0606292513 |
| ¿ | 15,878 | 1010101 | 7 | 15,878 × 8 − 158,78 × 7 = 15,878 | 15,878 | 111,146 | 0.0587089325 |
| ¾ | 15,584 | 1010001 | 7 | 15,584 × 8 − 15,584 × 7 = 15,584 | 15,584 | 109,088 | 0.0578479990 |
| X | 15,133 | 1010000 | 7 | 15,133 × 8 − 15,133 × 7 = 15,133 | 15,133 | 105,931 | 0.0565189165 |
| Â | 14,659 | 1001001 | 7 | 14,659 × 8 − 14,659 × 7 = 14,659 | 14,659 | 102,613 | 0.0551107992 |
| E | 14,002 | 1000111 | 7 | 14,002 × 8 − 14,002 × 7 = 14,002 | 14,002 | 98,014 | 0.0531392767 |
| | | 11,595 | 0001111 | 7 | 11,595 × 8 − 11,595 × 7 = 11,595 | 11,595 | 81,165 | 0.0457024780 |
| u | 11,549 | 0001110 | 7 | 11,549 × 8 − 11,549 × 7 = 11,549 | 11,549 | 80,843 | 0.0455568088 |
| ± | 11,140 | 0001000 | 7 | 11,140 × 8 − 11,140 × 7 = 11,140 | 11,140 | 77,980 | 0.0442552980 |
| z | 10,792 | 0000000 | 7 | 10,792 × 8 − 10,792 × 7 = 10,792 | 10,792 | 75,544 | 0.0431387351 |
| / | 10,575 | 11111101 | 8 | 10,575 × 8 − 10,575 × 8 = 0 | 0 | 84,600 | 0.0424380946 |
| ¥ | 10,471 | 11111100 | 8 | 10,471 × 8 − 10,471 × 8 = 0 | 0 | 83,768 | 0.0421010826 |
| . | 9949 | 11100110 | 8 | 9949 × 8 − 9949 × 8 = 0 | 0 | 79,592 | 0.0403972615 |
| û | 9833 | 11011111 | 8 | 9833 × 8 − 9833 × 8 = 0 | 0 | 78,664 | 0.0400157852 |
| ä | 9040 | 11001111 | 8 | 9040 × 8 − 9040 × 8 = 0 | 0 | 72,320 | 0.0373787946 |
| ) | 8945 | 11001110 | 8 | 8945 × 8 − 8945 × 8 = 0 | 0 | 71,560 | 0.0370593545 |
| é | 8514 | 11000011 | 8 | 8514 × 8 − 8514 × 8 = 0 | 0 | 68,112 | 0.0356001401 |
| _ | 8466 | 11000010 | 8 | 8466 × 8 − 8466 × 8 = 0 | 0 | 67,728 | 0.0354365961 |
| s | 8130 | 10101001 | 8 | 8130 × 8 − 8130 × 8 = 0 | 0 | 65,040 | 0.0342858027 |
| ½ | 7315 | 10010001 | 8 | 7315 × 8 − 7315 × 8 = 0 | 0 | 58,520 | 0.0314487129 |
| Š | 6900 | 10001101 | 8 | 6900 × 8 − 6900 × 8 = 0 | 0 | 55,200 | 0.0299774250 |
| U | 5907 | 00111000 | 8 | 5907 × 8 − 5907 × 8 = 0 | 0 | 47,256 | 0.0263758905 |
| ~ | 5459 | 00000011 | 8 | 5459 × 8 − 5459 × 8 = 0 | 0 | 43,672 | 0.0247097701 |
| î | 5024 | 111001110 | 9 | 5024 × 8 − 5024 × 9 = −5024 | −5024 | 45,216 | 0.0230646747 |
| « | 4314 | 101011111 | 9 | 4314 × 8 − 4314 × 9 = −4314 | −4314 | 38,826 | 0.0203154453 |
| þ | 4142 | 101011110 | 9 | 4142 × 8 − 4142 × 9 = −4142 | −4142 | 37,278 | 0.0196363053 |
| œ | 4106 | 101011101 | 9 | 4106 × 8 − 4106 × 9 = −4106 | −4106 | 36,954 | 0.0194934655 |
| ï | 3857 | 101010001 | 9 | 3857 × 8 − 3857 × 9 = −3857 | −3857 | 34,713 | 0.0184986608 |
| + | 3636 | 100100000 | 9 | 3636 × 8 − 3636 × 9 = −3636 | −3636 | 32,724 | 0.0176052864 |
| w | 3229 | 001110111 | 9 | 3229 × 8 − 3229 × 9 = −3229 | −3229 | 29,061 | 0.0159322230 |
| ç | 3089 | 001110110 | 9 | 3089 × 8 − 3089 × 9 = −3089 | −3089 | 27,801 | 0.0153477517 |
| ¬ | 3062 | 001110101 | 9 | 3062 × 8 − 3062 × 9 = −3062 | −3062 | 27,558 | 0.0152344723 |
| p | 3024 | 001110011 | 9 | 3024 × 8 − 3024 × 9 = −3024 | −3024 | 27,216 | 0.0150747286 |
| q | 2818 | 000100110 | 9 | 2818 × 8 − 2818 × 9 = −2818 | −2818 | 25,362 | 0.0142021730 |
| ñ | 2796 | 000100100 | 9 | 2796 × 8 − 2796 × 9 = −2796 | −2796 | 25,164 | 0.0141083110 |
| ê | 2665 | 000000100 | 9 | 2665 × 8 − 2665 × 9 = −2665 | −2665 | 23,985 | 0.0135465855 |
| D | 2600 | 1110011111 | 10 | 2600 × 8 − 2600 × 10 = −5200 | −5200 | 26,000 | 0.0132660257 |
| ö | 2583 | 1110011110 | 10 | 2583 × 8 − 2583 × 10 = −5166 | −5166 | 25,830 | 0.0131924417 |
| K | 2344 | 1101111010 | 10 | 2344 × 8 − 2344 × 10 = −4688 | −4688 | 23,440 | 0.0121484651 |
| Á | 2310 | 1101111001 | 10 | 2310 × 8 − 2310 × 10 = −4620 | −4620 | 23,100 | 0.0119984550 |
| ¶ | 2160 | 1101111000 | 10 | 2160 × 8 − 2160 × 10 = −4320 | −4320 | 21,600 | 0.0113319272 |
| m | 2002 | 1010111000 | 10 | 2002 × 8 − 2002 × 10 = −4004 | −4004 | 20,020 | 0.0106210870 |
| f | 1867 | 1010100000 | 10 | 1867 × 8 − 1867 × 10 = −3734 | −3734 | 18,670 | 0.0100060762 |
| õ | 1840 | 1001000011 | 10 | 1840 × 8 − 1840 × 10 = −3680 | −3680 | 18,400 | 0.0098821815 |
| Q | 1665 | 1000110001 | 10 | 1665 × 8 − 1665 × 10 = −3330 | −3330 | 16,650 | 0.0090714919 |
| o | 1531 | 0011101001 | 10 | 1531 × 8 − 1531 × 10 = −3062 | −3062 | 15,310 | 0.0084411465 |
| ð | 1528 | 0011101000 | 10 | 1528 × 8 − 1528 × 10 = −3056 | −3056 | 15,280 | 0.0084269329 |
| e | 1509 | 0011100101 | 10 | 1509 × 8 − 1509 × 10 = −3018 | −3018 | 15,090 | 0.0083368070 |
| Ì | 1469 | 0011100100 | 10 | 1469 × 8 − 1469 × 10 = −2938 | −2938 | 14,690 | 0.0081464584 |
| ø | 1428 | 0001001110 | 10 | 1428 × 8 − 1428 × 10 = −2856 | −2856 | 14,280 | 0.0079504731 |
| ® | 1415 | 0001001011 | 10 | 1415 × 8 − 1415 × 10 = −2830 | −2830 | 14,150 | 0.0078881418 |
| J | 1365 | 0000001011 | 10 | 1365 × 8 − 1365 × 10 = −2730 | −2730 | 13,650 | 0.0076475342 |
| n | 1330 | 11011110111 | 11 | 1330 × 8 − 1330 × 11 = −3990 | −3990 | 14,630 | 0.0074782658 |
| i | 1040 | 10101110011 | 11 | 1040 × 8 − 1040 × 11 = −3120 | −3120 | 11,440 | 0.0060462641 |
| k | 1019 | 10101000011 | 11 | 1019 × 8 − 1019 × 11 = −3057 | −3057 | 11,209 | 0.0059403145 |
| l | 929 | 10010000101 | 11 | 929 × 8 − 929 × 11 = −2787 | −2787 | 10,219 | 0.0054823489 |
| j | 906 | 10010000100 | 11 | 906 × 8 − 906 × 11 = −2718 | −2718 | 9966 | 0.0053642520 |
| Ž | 898 | 10001100111 | 11 | 898 × 8 − 898 × 11 = −2694 | −2694 | 9878 | 0.0053230692 |
| Œ | 895 | 10001100110 | 11 | 895 × 8 − 895 × 11 = −2685 | −2685 | 9845 | 0.0053076114 |
| ? | 893 | 10001100101 | 11 | 893 × 8 − 893 × 11 = −2679 | −2679 | 9823 | 0.0052973018 |
| N | 884 | 10001100100 | 11 | 884 × 8 − 884 × 11 = −2652 | −2652 | 9724 | 0.0052508657 |
| í | 812 | 10001100000 | 11 | 812 × 8 − 812 × 11 = −2436 | −2436 | 8932 | 0.0048767525 |
| Space | 724 | 00010011110 | 11 | 724 × 8 − 724 × 11 = −2172 | −2172 | 7964 | 0.0044127160 |
| a | 709 | 00010010101 | 11 | 709 × 8 − 709 × 11 = −2127 | −2127 | 7799 | 0.0043328166 |
| g | 679 | 00000010101 | 11 | 679 × 8 − 679 × 11 = −2037 | −2037 | 7469 | 0.0041722735 |
| µ | 659 | 00000010100 | 11 | 659 × 8 − 659 × 11 = −1977 | −1977 | 7249 | 0.0040646756 |
| ß | 616 | 110111101101 | 12 | 616 × 8 − 616 × 12 = −2464 | −2464 | 7392 | 0.0038317250 |
| ÿ | 607 | 110111101100 | 12 | 607 × 8 − 607 × 12 = −2428 | −2428 | 7284 | 0.0037826782 |
| T | 520 | 101011100101 | 12 | 520 × 8 − 520 × 12 = −2080 | −2080 | 6240 | 0.0033029709 |
| ü | 495 | 101010000101 | 12 | 495 × 8 − 495 × 12 = −1980 | −1980 | 5940 | 0.0031631097 |
| M | 444 | 101010000100 | 12 | 444 × 8 − 444 × 12 = −1776 | −1776 | 5328 | 0.0028746957 |
| ó | 402 | 100011000010 | 12 | 402 × 8 − 402 × 12 = −1608 | −1608 | 4824 | 0.0026337800 |
| b | 352 | 000100111110 | 12 | 352 × 8 − 352 × 12 = −1408 | −1408 | 4224 | 0.0023424939 |
| L | 345 | 000100101001 | 12 | 345 × 8 − 345 × 12 = −1380 | −1380 | 4140 | 0.0023012906 |
| O | 345 | 000100101000 | 12 | 345 × 8 − 345 × 12 = −1380 | −1380 | 4140 | 0.0023012906 |
| Z | 293 | 1010111001001 | 13 | 293 × 8 − 293 × 13 = −1465 | −1465 | 3809 | 0.0019915935 |
| æ | 223 | 1010111001000 | 13 | 223 × 8 − 223 × 13 = −1115 | −1115 | 2899 | 0.0015630521 |
| c | 221 | 1000110000111 | 13 | 221 × 8 − 221 × 13 = −1105 | −1105 | 2873 | 0.0015505795 |
| Y | 219 | 1000110000110 | 13 | 219 × 8 − 219 × 13 = −1095 | −1095 | 2847 | 0.0015380928 |
| ë | 186 | 0001001111110 | 13 | 186 × 8 − 186 × 13 = −930 | −930 | 2418 | 0.0013299109 |
| ù | 92 | 00010011111110 | 14 | 92 × 8 − 92 × 14 = −552 | −552 | 1288 | 0.0007080876 |
| £ | 62 | 000100111111111 | 15 | 62 × 8 − 62 × 15 = −434 | −434 | 930 | 0.0004961866 |
| € | 32 | 0001001111111101 | 16 | 32 × 8 − 32 × 16 = −256 | −256 | 512 | 0.0002725284 |
| Í | 1 | 0001001111111100 | 16 | 1 × 8 − 1 × 16 = −8 | −8 | 16 | 0.0000112073 |
| Total freq: 1,858,212 | Saved bits: 4,494,225 | 10,371,471 | Entropy: 5.5481 |
References
- Raviteja, T.; Vedaraj, I.R. An Introduction of autonomous vehicles and A brief survey. J. Crit. Rev. 2020, 7, 13. [Google Scholar]
- Wiseman, Y. Autonomous Vehicles. In Encyclopedia of Information Science and Technology, 5th ed.; IGI Global: Hershey, PA, USA, 2020; Volume 1, Chapter 1; pp. 1–11. [Google Scholar]
- Parekh, D.; Poddar, N.; Rajpurkar, A.; Chahal, M.; Kumar, N.; Joshi, G.P.; Cho, W. A review on autonomous vehicles: Progress, methods and challenges. Electronics 2022, 11, 2162. [Google Scholar] [CrossRef]
- Cosgun, A.; Ma, L.; Chiu, J.; Huang, J.; Demir, M.; Anon, A.M.; Lian, T.; Tafish, H.; Al-Stouhi, S. Towards full automated drive in urban environments: A demonstration in GoMentum Station, California. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Klein, S.T.; Wiseman, Y. Parallel Huffman Decoding with Applications to JPEG Files. Comput. J. 2003, 46, 487–497. [Google Scholar] [CrossRef]
- Krile, S.; Kezić, D.; Dimc, F. NMEA Communication Standard for Shipboard Data Architecture. NAŠE MORE Znan. Časopis More Pomor. 2013, 60, 68–81. [Google Scholar]
- Marcellin, M.W.; Gormish, M.J.; Bilgin, A.; Boliek, M.P. An overview of JPEG-2000. In Proceedings of the DCC 2000. Data Compression Conference, Snowbird, UT, USA, 28–30 March 2000; IEEE: Piscataway, NJ, USA, 2000. [Google Scholar]
- Nurrohman, A.; Abdurohman, M. High performance streaming based on H264 and real time messaging protocol (RTMP). In Proceedings of the 2018 6th International Conference on Information and Communication Technology (ICoICT), Bandung, Indonesia, 3–5 May 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Chen, J.W.; Kao, C.Y.; Lin, Y.L. Introduction to H. 264 advanced video coding. In Proceedings of the 2006 Asia and South Pacific Design Automation Conference, Yokohama, Japan, 24–27 January 2006. [Google Scholar]
- Taeihagh, A.; Lim, H.S.M. Governing autonomous vehicles: Emerging responses for safety, liability, privacy, cybersecurity, and industry risks. Transp. Rev. 2019, 39, 103–128. [Google Scholar] [CrossRef]
- Hacohen, S.; Medina, O. Autonomous Vehicle, Sensing and Communication Survey; Ariel University: Ariel, Israel, 2020. [Google Scholar]
- UK Government. The Key Principles of Vehicle Cyber Security for Connected and Automated Vehicles; Centre for Connected and Autonomous Vehicles, Department for Transport Guidance: London, UK, 2017.
- Fitriya, L.A.; Purboyo, T.W.; Prasasti, A.L. A Review of Data Compression Techniques. Int. J. Appl. Eng. Res. 2017, 12, 19. [Google Scholar]
- Svanberg, J.; Palmkvist, K. Lightweight Real-Time Lossless Software Compression of Trace Data. Master’s Thesis, Department of Electrical Engineering, Linköping University, Linköping, Sweden, 2021. [Google Scholar]
- Huffman, D.A. A Method for the Construction of Minimum-Redundancy Codes. Proc. IRE 1952, 40, 1098–1101. [Google Scholar] [CrossRef]
- Alistair, M. Huffman Coding. ACM Comput. Surv. 2019, 52, 4. [Google Scholar]
- Hashemian, R. Memory efficient and high-speed search Huffman coding. IEEE Trans. Commun. 1995, 43, 2576–2581. [Google Scholar] [CrossRef]
- Shen, L.; Stopher, P.R. Review of GPS Travel Survey and GPS Data-Processing Methods. Transp. Rev. 2014, 34, 316–334. [Google Scholar] [CrossRef]
- Abulude, F.; Akinnusotu, A.; Adeyemi, A. Global Positioning System and Its Wide Applications. Wilolud J. 2015, 9, 22–30. [Google Scholar]
- Curry, A. The internet of Animals. Nature 2018, 562, 322–326. [Google Scholar] [CrossRef] [PubMed]
- Martin, B. Technology to the Rescue. In Survival or Extinction? Springer: Berlin/Heidelberg, Germany, 2019; pp. 319–330. [Google Scholar]
- Buchheit, M.; Al Haddad, H.; Simpson, B.M.; Palazzi, D.; Bourdon, P.C.; Di Salvo, V.; Mendez-Villanueva, A. Monitoring Accelerations with GPS in Football: Time to Slow Down? Int. J. Sports Physiol. Perform. 2014, 9, 442–445. [Google Scholar] [CrossRef]
- Rahiman, W.; Zainal, Z. An Overview of Development GPS Navigation for Autonomous Car. In Proceedings of the 2013 IEEE 8th Conference on Industrial Electronics and Applications (ICIEA), Melbourne, Australia, 19–21 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1112–1118. [Google Scholar]
- Mathiesen, T.T. GPS, NMEA, WGS-84, GIS and VB.NET. Available online: http://www.tma.dk/gps/ (accessed on 16 July 2008).
- Langley, R. Nmea 0183: A gps receiver. GPS World 1995, 6, 54–57. [Google Scholar]
- Si, H.; Aung, Z.M. Position Data Acquisition from NMEA Protocol of Global Positioning System. Int. J. Comput. Electr. Eng. 2011, 3, 353–357. [Google Scholar] [CrossRef]
- Lever, R.; Hinze, A.; Buchanan, G. Compressing gps data on mobile devices. In On the Move to Meaningful Internet Systems 2006: OTM 2006 Workshops: OTM Confederated International Workshops and Posters, AWeSOMe, CAMS, COMINF, IS, KSinBIT, MIOS-CIAO, MONET, OnToContent, ORM, PerSys, OTM Academy Doc-Toral Consortium, RDDS, SWWS, and SeBGIS 2006, Montpellier, France, 29 October–3 November 2006; Proceedings, Part II; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- DePriest, D. NMEA Data. Available online: https://web.fe.up.pt/~ee95080/NMEA%20data.pdf (accessed on 16 August 2021).
- Novatel, H. GNSS Logs. 2022. Available online: https://docs.novatel.com/OEM7/Content/Logs/Core_Logs.htm (accessed on 16 August 2021).
- Rahnamai, K.; Gorman, K.; Gray, A.; Arabshahi, P. Formations of Autonomous Vehicles Using Global Positioning Systems (GPS). In Proceedings of the 2005 IEEE Aerospace Conference, Big Sky, Montana, 5–12 March 2005; IEEE: Piscataway, NJ, USA, 2005. [Google Scholar]
- Ulku, E.E.; Bekmezci, I. Multi token based location sharing for multi UAV systems. Int. J. Comput. Electr. Eng. 2016, 8, 197. [Google Scholar] [CrossRef]
- Kakad, S.; Sarode, P.; Bakal, J.W. A survey on query response time optimization approaches for reliable data communication in wireless sensor network. Int. J. Wirel. Commun. Netw. Technol. 2012, 1, 31–36. [Google Scholar]
- Jurdana, I.; Lopac, N.; Wakabayashi, N.; Liu, H. Shipboard Data Compression Method for Sustainable Real-Time Maritime Communication in Remote Voyage Monitoring of Autonomous Ships. Sustainability 2021, 13, 8264. [Google Scholar] [CrossRef]
- Kabir, M.; Kang, M.J.; Wu, X.; Hamidi, M. Study on U-turn behavior of vessels in narrow waterways based on AIS data. Ocean Eng. 2022, 246, 110608. [Google Scholar] [CrossRef]
- Correia, S.D.; Perez, R.; Matos-Carvalho, J.; Leithardt, V.R.Q. μJSON, a Lightweight Compression Scheme for Embedded GNSS Data Transmission on IoT Nodes. In Proceedings of the 2022 5th Conference on Cloud and Internet of Things (CIoT), Marrakech, Morocco, 28–30 March 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Zhou, F.; Zhao, L.; Li, L.; Hu, Y.; Jiang, X.; Yu, J.; Liang, G. GNSS Signal Acquisition Algorithm Based on Two-Stage Compression of Code-Frequency Domain. Appl. Sci. 2022, 12, 6255. [Google Scholar] [CrossRef]
- Ansari, B.; Kaushik, V.; Biswas, S.K. Raw GNSS Data Compression using Compressive Sensing for Reflectometry Applications. In Proceedings of the 2020 XXXIIIrd General Assembly and Scientific Symposium of the International Union of Radio Science, Rome, Italy, 29 August–5 September 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Perez, R.; Leithardt, V.R.Q.; Correia, S.D. Lossless Compression Scheme for Efficient GNSS Data Transmission on IoT Devices. In Proceedings of the 2021 International Conference on Electrical, Computer and Energy Technologies (ICECET), Cape Town, South Africa, 9–10 December 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Muckell, J.; Hwang, J.H.; Patil, V.; Lawson, C.T.; Ping, F.; Ravi, S.S. SQUISH: An online approach for GPS trajectory compression. In Proceedings of the 2nd International Conference on Computing for Geospatial Research & Applications, Washington, DC, USA, 23–25 May 2011. [Google Scholar]
- Sichitiu, M.L.; Kihl, M. Inter-vehicle communication systems: A survey. IEEE Commun. Surv. Tutor. 2008, 10, 88–105. [Google Scholar] [CrossRef]
- Hussein, H.H.; Radwan, M.H.; El-Kader, S.M.A. Proposed localization scenario for autonomous vehicles in GPS denied environment. In Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2020, Cairo, Egypt, 19–21 October 2020; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Gakstatter, E. What Exactly Is GPS NMEA Data? 4 February 2015. Available online: https://www.gpsworld.com/what-exactly-is-gps-nmea-data/ (accessed on 30 December 2021).
- Kwon, S.K.; Tamhankar, A.; Rao, K.R. Overview of H. 264/MPEG-4 part 10. J. Vis. Commun. Image Represent. 2006, 17, 186–216. [Google Scholar] [CrossRef]
- Lin, Y.; Han Hsu, H. General architecture for MPEG-2/H. 263/H. 264/AVC to H. 264/AVC intra frame transcoding. J. Signal Process. Syst. 2011, 65, 89–103. [Google Scholar] [CrossRef]
- Wiegand, T.; Sullivan, G.J.; Bjontegaard, G.; Luthra, A. Overview of the H.264/AVC Video Coding Standard. IEEE Trans. Circuits Syst. Video Technol. 2003, 13, 560–576. [Google Scholar] [CrossRef]
- Sullivan, G.J.; Wiegand, T. Video compression-from concepts to the H. 264/AVC standard. Proc. IEEE 2005, 93, 18–31. [Google Scholar] [CrossRef]
- Vijayanagar, K.R. I, P, and B-frames—Differences and Use Cases Made Easy. 14 December 2020. Available online: https://ottverse.com/i-p-b-frames-idr-keyframes-differences-usecases/ (accessed on 19 August 2022).
- Romero, A. IBM Watson Media. 13 April 2021. Available online: https://blog.video.ibm.com/streaming-video-tips/keyframes-interframe-video-compression/ (accessed on 28 August 2022).
- Wang, W.X.; Guo, R.J.; Yu, J. Research on road traffic congestion index based on comprehensive parame-ters: Taking Dalian city as an example. Adv. Mech. Eng. 2018, 10, 1687814018781482. [Google Scholar]
- Plitt, A.; Ricciulli, V. New York City’s Streets are ‘More Congested than Ever’: Report. 8 August 2019. Available online: https://ny.curbed.com/2019/8/15/20807470/nyc-streets-dot-mobility-report-congestion (accessed on 15 August 2019).
- Arena, F.; Pau, G.; Severino, A. A Review on IEEE 802.11p for Intelligent Transportation Systems. J. Sens. Actuator Netw. 2020, 9, 22. [Google Scholar] [CrossRef]
- Available online: https://play.google.com/store/apps/details?id=com.peterhohsy.nmeatools&hl=en&gl=US&pli=1 (accessed on 18 September 2022).
- Guo, Y.; Li, W.; Yang, G.; Jiao, Z.; Yan, J. Combining Dilution of Precision and Kalman Filtering for UWB Positioning in a Narrow Space. Remote Sens. 2022, 14, 5409. [Google Scholar] [CrossRef]
- Jiang, S.; Wang, W.; Peng, P. A Single-Site Vehicle Positioning Method in the Rectangular Tunnel Environment. Remote Sens. 2023, 15, 527. [Google Scholar] [CrossRef]
- Cui, Y.; Ge, S.S. Autonomous vehicle positioning with gps in urban canyon environments. IEEE Trans. Robot. Autom. 2003, 19, 15–25. [Google Scholar] [CrossRef]
- Aggarwal, A.K. GPS-based localization of autonomous vehicles. In Autonomous Driving and Advanced Driver-Assistance Systems (ADAS); CRC Press: Boca Raton, FL, USA, 2021; pp. 437–448. [Google Scholar]
- Park, B.; Savoldi, A.; Gubian, P.; Park, J.; Lee, S.H.; Lee, S. Recovery of Damaged Compressed Files for Digital Forensic Purposes. IEEE Comput. Soc. 2008, 2008, 365–372. [Google Scholar]
- Guha, T.; Ward, R.K. Image similarity using sparse representation and compression distance. IEEE Trans. Multimed. 2014, 16, 980–987. [Google Scholar] [CrossRef]
- Fano, R.M. The Transmission of Information, Research Laboratory of Electronics; Technical Report 65; MIT: Cambridge, MA, USA, 1949; Volume 9, Issue 22. [Google Scholar]
- Vaidya, M.; Walia, E.S.; Gupta, A. Data compression using Shannon-fano algorithm implemented by VHDL. In Proceedings of the 2014 International Conference on Advances in Engineering & Technology Research (ICAETR-2014), Unnao, India, 1–2 August 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]






| Name and Pure Size of File: | Compression Method and Ratio. | ||||
|---|---|---|---|---|---|
| Test 1 = 286 KB (Total) | Zip | Diff | Diff&Huff | Diff&Zip | Diff&Mapping&Zip |
| 28 KB 90.21% | 207 KB 27.62% | 37 KB 87.1% | 25 KB 91.26% | 19 KB 93.36% | |
| Name and Pure Size of File: | Compression Method and Ratio. | ||||
|---|---|---|---|---|---|
| Test 2 = 556 KB (Total) | Zip | Diff | Diff&Huff | Diff&Zip | Diff&Mapping&Zip |
| 53 KB 90.47% | 401 KB 22.30% | 70 KB 87.4% | 45 KB 93.91% | 34 KB 93.88% | |
| Test 3 = 929 KB (Total) | 87 KB 90.64% | 671 KB 27.8% | 118 KB 87.3% | 75 KB 91.93% | 57 KB 93.86% |
| Test 4 = 9158 KB (Total) | 861 KB 91.5% | 6231 KB 31.96% | 1061 KB 88.41% | 730 KB 92.03% | 563 KB 93.85% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rakhmanov, A.; Wiseman, Y. Compression of GNSS Data with the Aim of Speeding up Communication to Autonomous Vehicles. Remote Sens. 2023, 15, 2165. https://doi.org/10.3390/rs15082165
Rakhmanov A, Wiseman Y. Compression of GNSS Data with the Aim of Speeding up Communication to Autonomous Vehicles. Remote Sensing. 2023; 15(8):2165. https://doi.org/10.3390/rs15082165
Chicago/Turabian StyleRakhmanov, Amnon, and Yair Wiseman. 2023. "Compression of GNSS Data with the Aim of Speeding up Communication to Autonomous Vehicles" Remote Sensing 15, no. 8: 2165. https://doi.org/10.3390/rs15082165
APA StyleRakhmanov, A., & Wiseman, Y. (2023). Compression of GNSS Data with the Aim of Speeding up Communication to Autonomous Vehicles. Remote Sensing, 15(8), 2165. https://doi.org/10.3390/rs15082165