
Coastal Aquaculture Extraction Using GF-3 Fully Polarimetric SAR Imagery: A Framework Integrating UNet++ with Marker-Controlled Watershed Segmentation



Abstract
:1. Introduction
2. Study Area and Data
2.1. Study Area
2.2. Satellite Data and Data Processing
3. Methodology
3.1. Extraction and Optimisation of GF-3 Fully Polarimetric Scattering Features
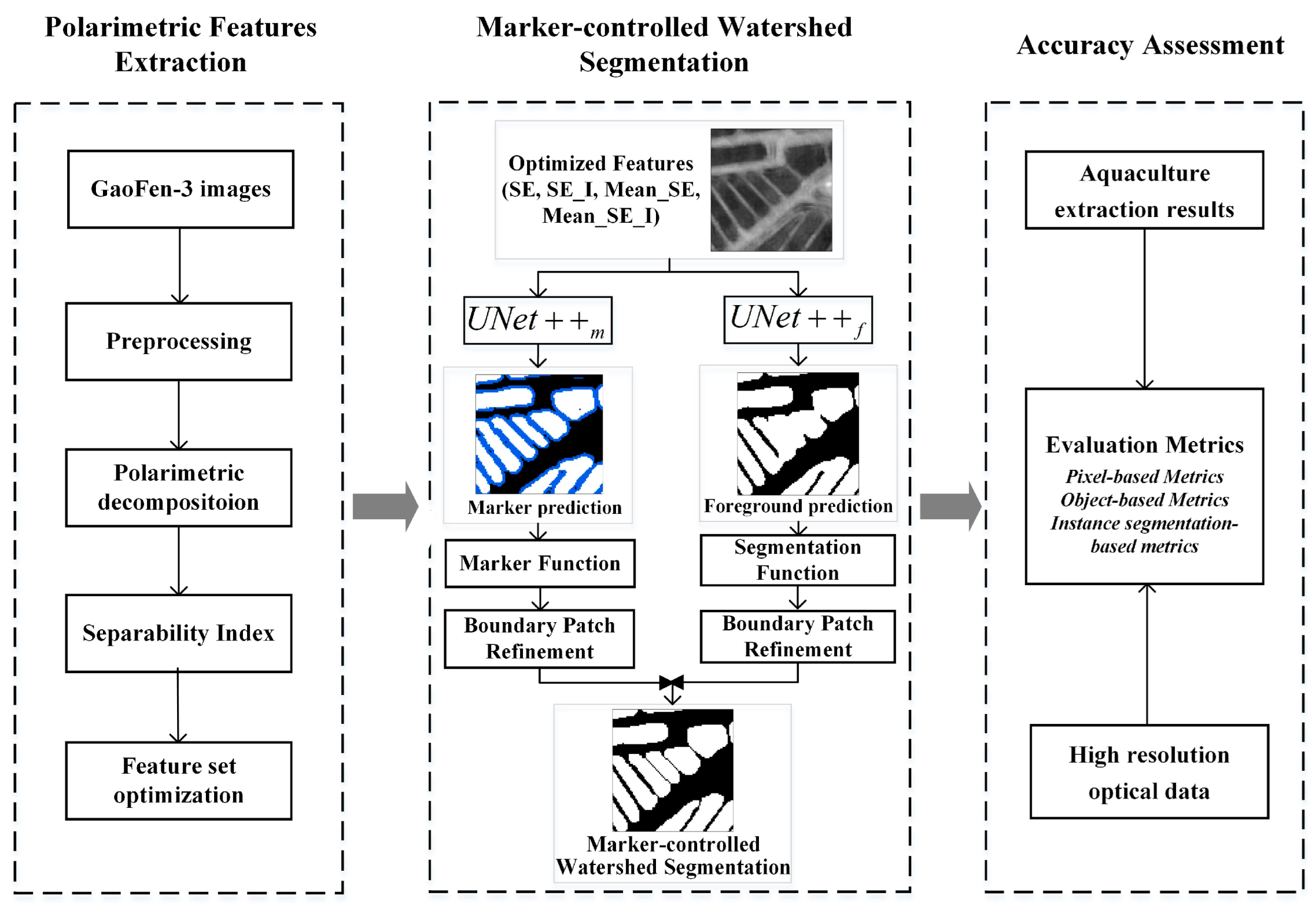
3.2. Segmentation Using Combined UNet++ and the Marker-Controlled Watershed Strategy
3.2.1. UNet++ Architecture
3.2.2. Marker and Foreground Predictions
3.2.3. Marker-Controlled Watershed Segmentation
3.2.4. Boundary Patch Refinement
3.3. Accuracy Assessment and Comparison
4. Experiments and Results
4.1. Experimental Setup
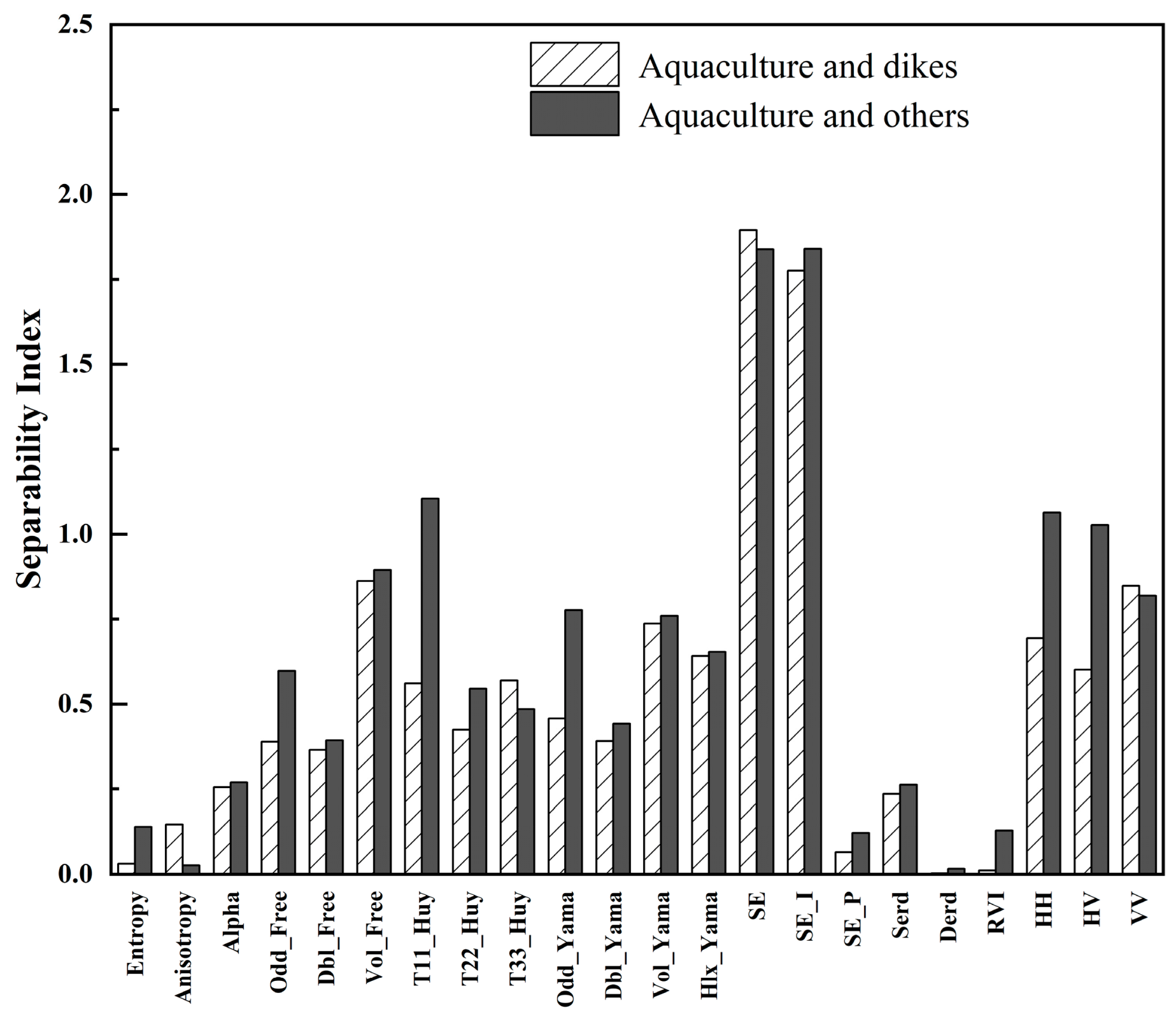
4.2. Separability of Polarimetric Features and Feature Optimisation
4.3. The Results of Coastal Aquaculture Mapping and Accuracy Assessment
5. Discussion
5.1. Multiclass Segmentation Strategy during Marker Prediction
5.2. Impacts of Boundary Patch Refinement
5.3. Classification Performance of Single Classifiers and the Proposed Combined Model
5.4. The Transferability and Robustness of the Integrated Framework
6. Conclusions
- (1)
- GF-3 data contain rich and valuable surface scattering information and can thus be used for aquaculture extraction. A total of 22 features were obtained from four typical polarimetric segmentations and other polarimetric parameters. The separability index (SI) of all the features was calculated, and four features were optimised: SE, SE_I, SE_Mean and SE_I_Mean.
- (2)
- Compared with traditional machine learning methods, the introduction of deep learning methods greatly improved the extraction accuracy, with F1 greater than 94% and the IoU greater than 88%. In addition, compared with those of the UNet++ network alone, the F1, IOU, MR and insF1 of UNet++-based MCW (3BPR, 2BPR) (the proposed method) were improved by 1.7%, 3.2%, 21.74% and 12.11%, respectively.
- (3)
- The BPR postprocessing method optimised the extraction of boundary information for the aquaculture ponds, eliminating the error, omission and adhesion issues at the boundaries (dikes and dams). Notably, the MR and insF1 values increased by 12.88% and 5.94%, respectively.
- (4)
- The proposed MCW (3BPR, 2BPR) framework in this paper is not only applicable to UNet++ but also applicable to other deep learning models, such as LinkNet and UNet, and can obtain high-quality results. It was further confirmed that the MCW (3BPR, 2BPR) framework has certain robustness and universality.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- FAO. The State of World Fisheries and Aquaculture 2018-Meeting the Sustainable Development Goals; FAO: Rome, Italy, 2018; Volume 61, ISBN 9789251305621. [Google Scholar]
- Alexandridis, T.K.; Topaloglou, C.A.; Lazaridou, E.; Zalidis, G.C. The performance of satellite images in mapping aquacultures. Ocean Coast. Manag. 2008, 51, 638–644. [Google Scholar] [CrossRef]
- Sun, Z.; Luo, J.; Yang, J.; Yu, Q.; Zhang, L.; Xue, K.; Lu, L. Nation-scale mapping of coastal aquaculture ponds with sentinel-1 SAR data using google earth engine. Remote Sens. 2020, 12, 3086. [Google Scholar] [CrossRef]
- Duan, Y.; Li, X.; Zhang, L.; Liu, W.; Liu, S.; Chen, D.; Ji, H. Detecting spatiotemporal changes of large-scale aquaculture ponds regions over 1988–2018 in Jiangsu Province, China using Google Earth Engine. Ocean Coast. Manag. 2020, 188, 105144. [Google Scholar] [CrossRef]
- Duan, Y.; Tian, B.; Li, X.; Liu, D.; Sengupta, D.; Wang, Y.; Peng, Y. Tracking changes in aquaculture ponds on the China coast using 30 years of Landsat images. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102383. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.; Yang, X.; Zhang, Y.; Yang, F.; Liu, B.; Cai, P. Satellite-based monitoring and statistics for raft and cage aquaculture in China’s offshore waters. Int. J. Appl. Earth Obs. Geoinf. 2020, 91, 102118. [Google Scholar] [CrossRef]
- Fu, Y.; Ye, Z.; Deng, J.; Zheng, X.; Huang, Y.; Yang, W.; Wang, Y.; Wang, K. Finer resolution mapping of marine aquaculture areas using world view-2 imagery and a hierarchical cascade convolutional neural network. Remote Sens. 2019, 11, 1678. [Google Scholar] [CrossRef]
- Peng, Y.; Sengupta, D.; Duan, Y.; Chen, C.; Tian, B. Accurate mapping of Chinese coastal aquaculture ponds using biophysical parameters based on Sentinel-2 time series images. Mar. Pollut. Bull. 2022, 181, 113901. [Google Scholar] [CrossRef]
- Yu, Z.; Di, L.; Rahman, M.S.; Tang, J. Fishpond mapping by spectral and spatial-based filtering on google earth engine: A case study in singra upazila of Bangladesh. Remote Sens. 2020, 12, 2692. [Google Scholar] [CrossRef]
- Duan, Y.; Li, X.; Zhang, L.; Chen, D.; Liu, S.; Ji, H. Mapping national-scale aquaculture ponds based on the Google Earth Engine in the Chinese coastal zone. Aquaculture 2020, 520, 734666. [Google Scholar] [CrossRef]
- Ren, C.; Wang, Z.; Zhang, Y.; Zhang, B.; Chen, L.; Xi, Y.; Xiao, X.; Doughty, R.B.; Liu, M.; Jia, M.; et al. Rapid expansion of coastal aquaculture ponds in China from Landsat observations during 1984–2016. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101902. [Google Scholar] [CrossRef]
- Stiller, D.; Ottinger, M.; Leinenkugel, P. Spatio-temporal patterns of coastal aquaculture derived from Sentinel-1 time series data and the full Landsat archive. Remote Sens. 2019, 11, 1707. [Google Scholar] [CrossRef]
- Ottinger, M.; Clauss, K.; Kuenzer, C. Large-scale assessment of coastal aquaculture ponds with Sentinel-1 time series data. Remote Sens. 2017, 9, 440. [Google Scholar] [CrossRef]
- Canty, M.J.; Nielsen, A.A.; Conradsen, K.; Skriver, H. Statistical analysis of changes in sentinel-1 time series on the Google earth engine. Remote Sens. 2020, 12, 46. [Google Scholar] [CrossRef]
- Chen, Y.; He, X.; Xu, J.; Zhang, R.; Lu, Y. Scattering feature set optimization and polarimetric SAR classification using object-oriented RF-SFS algorithm in coastal wetlands. Remote Sens. 2020, 12, 407. [Google Scholar] [CrossRef]
- Tu, C.; Li, P.; Li, Z.; Wang, H.; Yin, S.; Li, D.; Zhu, Q.; Chang, M.; Liu, J.; Wang, G. Synergetic classification of coastal wetlands over the yellow river delta with gf-3 full-polarization sar and zhuhai-1 ohs hyperspectral remote sensing. Remote Sens. 2021, 13, 4444. [Google Scholar] [CrossRef]
- Schmitt, A.; Brisco, B. Wetland monitoring using the curvelet-based change detection method on polarimetric SAR imagery. Water 2013, 5, 1036–1051. [Google Scholar] [CrossRef]
- Wan, J.; Wang, J.; Zhu, M. Water extraction from fully polarized sar based on combined polarization and texture features. Water 2021, 13, 3332. [Google Scholar] [CrossRef]
- Fan, J.; Zhao, J.; Song, D.; Wang, X.; Wang, X.; Su, X. Marine floating raft aquaculture dynamic monitoring based on multi-source GF imagery. In Proceedings of the 2018 7th International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Hangzhou, China, 6–9 August 2018; pp. 1–4. [Google Scholar]
- Fan, J.; Zhao, J.; An, W.; Hu, Y. Marine floating raft aquaculture detection of GF-3 PolSAR images based on collective multikernel fuzzy clustering. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2741–2754. [Google Scholar] [CrossRef]
- Ottinger, M.; Clauss, K.; Kuenzer, C. Opportunities and challenges for the estimation of aquaculture production based on earth observation data. Remote Sens. 2018, 10, 1076. [Google Scholar] [CrossRef]
- Ottinger, M.; Clauss, K.; Huth, J.; Eisfelder, C.; Leinenkugel, P.; Kuenzer, C. Time series sentinel-1 SAR data for the mapping of aquaculture ponds in coastal Asia. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Valencia, Spain, 22–27 July 2018; pp. 9371–9374. [Google Scholar]
- Cui, B.G.; Zhong, Y.; Fei, D.; Zhang, Y.H.; Liu, R.J.; Chu, J.L.; Zhao, J.H. Floating raft aquaculture area automatic extraction based on fully convolutional network. J. Coast. Res. 2019, 90, 86–94. [Google Scholar] [CrossRef]
- Zeng, Z.; Wang, D.; Tan, W.; Yu, G.; You, J.; Lv, B.; Wu, Z. Rcsanet: A full convolutional network for extracting inland aquaculture ponds from high-spatial-resolution images. Remote Sens. 2021, 13, 92. [Google Scholar] [CrossRef]
- Wei, S.; Zhang, H.; Wang, C.; Wang, Y.; Xu, L. Multi-temporal SAR data large-scale crop mapping based on U-net model. Remote Sens. 2019, 11, 68. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Proceedings, Part III 18. Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Zhang, Z.; Liu, Q.; Wang, Y. Road extraction by deep residual u-net. IEEE Geosci. Remote Sens. Lett. 2018, 15, 749–753. [Google Scholar] [CrossRef]
- Wang, J.; Fan, J.; Wang, J. MDOAU-Net: A lightweight and robust deep learning model for SAR Image segmentation in aquaculture raft monitoring. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Zhou, Z.; Rahman Siddiquee, M.M.; Tajbakhsh, N.; Liang, J. Unet++: A nested u-net architecture for medical image segmentation. In Proceedings of the Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support: 4th International Workshop, DLMIA 2018, and 8th International Workshop, ML-CDS 2018, Held in Conjunction with MICCAI 2018, Granada, Spain, 20 September 2018; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; Volume 11045 LNCS, pp. 3–11. [Google Scholar]
- Zhou, Z.; Siddiquee, M.M.R.; Tajbakhsh, N.; Liang, J. Unet++: Redesigning skip connections to exploit multiscale features in image segmentation. IEEE Trans. Med. Imaging 2019, 39, 1856–1867. [Google Scholar] [CrossRef] [PubMed]
- Gaetano, R.; Masi, G.; Poggi, G.; Verdoliva, L.; Scarpa, G. Marker-controlled watershed-based segmentation of multiresolution remote sensing images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2987–3004. [Google Scholar] [CrossRef]
- Yang, X.; Li, H.; Zhou, X. Nuclei segmentation using marker-controlled watershed, tracking using mean-shift, and Kalman filter in time-lapse microscopy. IEEE Trans. Circuits Syst. I Regul. Pap. 2006, 53, 2405–2414. [Google Scholar] [CrossRef]
- Kim, E.; Park, S.; Hwang, S.; Moon, I.; Javidi, B. Deep learning-based phenotypic assessment of red cell storage lesions for safe transfusions. IEEE J. Biomed. Health Inform. 2021, 26, 1318–1328. [Google Scholar] [CrossRef]
- Waldner, F.; Diakogiannis, F.I. Deep learning on edge: Extracting field boundaries from satellite images with a convolutional neural network. Remote Sens. Environ. 2020, 245, 111741. [Google Scholar] [CrossRef]
- Hay, G.J.; Blaschke, T.; Marceau, D.J. A comparison of three image-object methods for the multiscale analysis of landscape structure. ISPRS J. Photogramm. Remote Sens. 2003, 57, 327–345. [Google Scholar] [CrossRef]
- Xing, F.; Xie, Y.; Yang, L. An automatic learning-based framework for robust nucleus segmentation. IEEE Trans. Med. Imaging 2016, 35, 550–566. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Qi, X.; Yu, L.; Dou, Q.; Qin, J.; Heng, P.A. DCAN: Deep contour-aware networks for object instance segmentation from histology images. Med. Image Anal. 2017, 36, 135–146. [Google Scholar] [CrossRef] [PubMed]
- Xie, L.; Qi, J.; Pan, L.; Wali, S. Integrating deep convolutional neural networks with marker-controlled watershed for overlapping nuclei segmentation in histopathology images. Neurocomputing 2020, 376, 166–179. [Google Scholar] [CrossRef]
- Lux, F.; Matula, P. Cell segmentation by combining marker-controlled watershed and deep learning. arXiv 2020, arXiv:2004.01607. [Google Scholar]
- Ju, A.; Wang, Z. A novel fully convolutional network based on marker-controlled watershed segmentation algorithm for industrial soot robot target segmentation. Evol. Intell. 2022, 1–18. [Google Scholar] [CrossRef]
- Naylor, P.; Laé, M.; Reyal, F.; Walter, T. Segmentation of nuclei in histopathology images by deep regression of the distance map. IEEE Trans. Med. Imaging 2019, 38, 448–459. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, K.; Myint, S.W.; Du, Z.; Li, Y.; Cao, J.; Liu, L.; Wu, Z. Integration of GF2 optical, GF3 SAR, and UAV data for estimating aboveground biomass of China’s largest artificially planted mangroves. Remote Sens. 2020, 12, 2039. [Google Scholar] [CrossRef]
- Han, G.; Changcheng, W.; Guanya, W.; Jianjun, Z.; Yuqi, T.; Peng, S.; Ziwei, Z. A crop classification method integrating GF-3 PolSAR and Sentinel-2A optical data in the Dongting Lake Basin. Sensors 2018, 18, 3139. [Google Scholar] [CrossRef]
- Shuai, G.; Zhang, J.; Basso, B.; Pan, Y.; Zhu, X.; Zhu, S.; Liu, H. Multi-temporal RADARSAT-2 polarimetric SAR for maize mapping supported by segmentations from high-resolution optical image. Int. J. Appl. Earth Obs. Geoinf. 2019, 74, 1–15. [Google Scholar] [CrossRef]
- Mishra, P.; Singh, D. A statistical-measure-based adaptive land cover classification algorithm by efficient utilization ofbservables. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2889–2900. [Google Scholar] [CrossRef]
- Gupta, S.; Singh, D.; Kumar, S. An approach based on texture measures to classify the fully polarimetric SAR image. In Proceedings of the 9th International Conference on Industrial and Information Systems, ICIIS 2014, Gwalior, India, 15–17 December 2014; pp. 1–6. [Google Scholar]
- Radars, P.; Data, A.T. Decision tree approach to classify the fully polarimetric RADARSAT-2 data. In Proceedings of the National Conference on Recent Advances in Electronics & Computer Engineering, RAECE-2015, Roorkee, India, 13–15 February 2015; pp. 318–323. [Google Scholar]
- Ping, L.; Xin, X.; Hao, D.; Xu, D. Polarimetric SAR image feature selection and multi-layer SVM classification using divisibility index. J. Comput. Appl. 2018, 38, 132. [Google Scholar]
- Mishra, P.; Singh, D.; Yamaguchi, Y. Land cover classification of PALSAR images by knowledge based decision tree classifier and supervised classifiers based on SAR observables. Prog. Electromagn. Res. B 2011, 30, 47–70. [Google Scholar] [CrossRef]
- Li, Z.; Zuo, J.; Zhang, C.; Sun, Y. Pneumothorax image segmentation and prediction with UNet++ and MSOF strategy. In Proceedings of the 2021 IEEE International Conference on Consumer Electronics and Computer Engineering, ICCECE 2021, Guangzhou, China, 15–17 January 2021; pp. 710–713. [Google Scholar]
- Yi, F.; Moon, I.; Javidi, B. Automated red blood cells extraction from holographic images using fully convolutional neural networks. Biomed. Opt. Express 2017, 8, 4466–4479. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Zhou, Y.; Zhang, X.; Li, R.; Yang, D. Accurate extraction of artificial pit-pond integrating edge features and semantic information. J. Geo-Inform. Sci. 2022, 24, 766–779. [Google Scholar] [CrossRef]
- Cheng, B.; Liang, C.; Liu, X.; Liu, Y.; Ma, X.; Wang, G. Research on a novel extraction method using Deep Learning based on GF-2 images for aquaculture areas. Int. J. Remote Sens. 2020, 41, 3575–3591. [Google Scholar] [CrossRef]
- Tang, C.; Chen, H.; Li, X.; Li, J.; Zhang, Z.; Hu, X. Look closer to segment better: Boundary patch refinement for instance segmentation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 19–25 June 2021; pp. 13926–13935. [Google Scholar]
- Ding, L.; Tang, H.; Liu, Y.; Shi, Y.; Zhu, X.X.; Bruzzone, L. Adversarial shape learning for building extraction in VHR remote sensing images. IEEE Trans. Image Process. 2022, 31, 678–690. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Liu, Y.; Yang, P.; Chen, H.A.O.; Zhang, H.; Wang, D.A.N.; Zhang, X.I.N. HA U-Net: Improved model for building extraction from high resolution remote sensing imagery. IEEE Access 2021, 9, 101972–101984. [Google Scholar] [CrossRef]
- Ma, X. Apollo: An adaptive parameter-wise diagonal quasi-newton method for nonconvex stochastic optimization. arXiv 2020, arXiv:2009.13586. [Google Scholar]
- Loshchilov, I.; Hutter, F. SGDR: Stochastic gradient descent with warm restarts. arXiv 2016, arXiv:1608.03983. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polarimetric Decompositions Methods | Acronyms of Features | Physical Meanings |
|---|---|---|
| H/A/Alpha | Entropy | Polarimetric entropy |
| Anisotropy | Polarimetric anisotropy | |
| Alpha | Average polarisation scattering angle | |
| Freeman3 | Freeman_Odd | Surface scattering |
| Freeman_Dbl | Double-bounce scattering | |
| Freeman_Vol | Surface scattering | |
| Huynen | Huynen_T11 | Symmetry factor |
| Huynen_T22 | Asymmetric factor | |
| Huynen_T33 | Irregularity factor | |
| Yamaguchi4 | Yamaguchi4_Odd | Surface scattering |
| Yamaguchi4_Dbl | Double-bounce scattering | |
| Yamaguchi4_Vol | Surface scattering | |
| Yamaguchi4_Hlx | Helix scattering | |
| Other polarisation features | SE | Shannon Entropy |
| SE_I | Intensity component of SE | |
| SE_P | Polarisation component of SE | |
| Serd | Single-bounce eigenvalue relative difference | |
| Derd | Double-bounce eigenvalue relative difference | |
| RVI | Radar Vegetation Index | |
| Backscattering coefficients | HH | Co-polarised horizontal scattering matrix elements |
| HV | Cross-polar scattering matrix elements | |
| VV | Co-polarised vertical scattering matrix elements |
| Model | F1 | IOU | Matching Rate | insF1 |
|---|---|---|---|---|
| SVM | 91.02 | 83.52 | - | - |
| RF | 91.30 | 83.99 | - | - |
| UNet | 94.45 | 89.49 | 47.96 | 70.83 |
| LinkNet | 94.40 | 89.40 | 38.64 | 62.00 |
| UNet++ | 93.98 | 88.65 | 55.26 | 74.94 |
| MCW (3BPR, 2BPR) | 95.75 | 91.85 | 77.00 | 87.05 |
| Model | Boundary Patch Refinement | F1 | IoU | MR | insF1 | |
|---|---|---|---|---|---|---|
| UNet++m | UNet++f | |||||
| MCW (3, 2) | ✕ | ✕ | 95.47 | 91.34 | 64.12 | 81.11 |
| MCW (3, 2BPR) | ✕ | √ | 95.59 | 91.55 | 70.33 | 84.12 |
| MCW (3BPR, 2) | √ | ✕ | 95.74 | 91.83 | 74.87 | 86.12 |
| MCW (3BPR, 2BPR) | √ | √ | 95.75 | 91.85 | 77.00 | 87.05 |
| Model | Model | F1 | IoU | MR | insF1 |
|---|---|---|---|---|---|
| Single model | UNet++ | 93.98 | 88.65 | 55.26 | 74.94 |
| UNet | 94.45 | 89.49 | 47.96 | 70.83 | |
| LinkNet | 94.40 | 89.4 | 38.64 | 62.00 | |
| MCW (3BPR, 2BPR) | UNet++ | 95.75 | 91.85 | 77.00 | 87.05 |
| UNet | 95.17 | 90.79 | 75.68 | 87.12 | |
| LinkNet | 94.99 | 90.46 | 71.42 | 84.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; He, X.; Yang, P.; Motagh, M.; Xu, J.; Xiong, J. Coastal Aquaculture Extraction Using GF-3 Fully Polarimetric SAR Imagery: A Framework Integrating UNet++ with Marker-Controlled Watershed Segmentation. Remote Sens. 2023, 15, 2246. https://doi.org/10.3390/rs15092246
Yu J, He X, Yang P, Motagh M, Xu J, Xiong J. Coastal Aquaculture Extraction Using GF-3 Fully Polarimetric SAR Imagery: A Framework Integrating UNet++ with Marker-Controlled Watershed Segmentation. Remote Sensing. 2023; 15(9):2246. https://doi.org/10.3390/rs15092246
Chicago/Turabian StyleYu, Juanjuan, Xiufeng He, Peng Yang, Mahdi Motagh, Jia Xu, and Jiacheng Xiong. 2023. "Coastal Aquaculture Extraction Using GF-3 Fully Polarimetric SAR Imagery: A Framework Integrating UNet++ with Marker-Controlled Watershed Segmentation" Remote Sensing 15, no. 9: 2246. https://doi.org/10.3390/rs15092246