1. Introduction
The sea surface temperature (SST) is a key state variable for studying and predicting the interaction between the ocean and the atmosphere [
1] and an indicator of global climate change [
2,
3,
4]. Its accurate mapping is critical for the understanding of ocean phenomena such as coastal upwelling. The ability to extract accurate SST and its gradients is essential for the study of coastal processes [
5] and for the better understanding of the mesoscale and sub-mesoscale coastal dynamics [
6]. Satellites offer the possibility to map SST at large spatial scales. Compared to in situ measurements, they provide better spatial coverage of the ocean SST [
7]. However, the coarse spatiotemporal resolution of the available satellite data may not be adequate for small-scale assessments of ocean phenomena. In addition, coastal areas are often covered by clouds, resulting in data gaps within the satellite data, hence full spatial coverage is not available. For many applications the data gaps have to be interpolated, increasing the uncertainty of the final satellite product. The problem of cloud cover in coastal areas is dominant, especially in our study area, the California Coast [
8,
9]. In California, the term June Gloom is used to describe the cloudy, overcast sky and the cool temperatures of late spring and early summer.
Satellite SST data are provided to the users with quality flags for each pixel, typically based on a quality assessment of the atmospheric correction, atmospheric conditions at the time of acquisition, cloud cover, etc. These quality flags span a scale from 0 to 5 that indicates the quality level of each pixel. Zero indicates a complete failure or masked pixel and the highest number indicates the best quality that a pixel can have within the SST product (
https://oceancolor.gsfc.nasa.gov/atbd/sst/flag/, accessed on 1 June 2022). These per-pixel quality levels are also provided to the users within the SST product. The quality levels are very important as they are used to indicate which pixel will be used for the next processing step up to the extraction of the final SST gridded product (level-4).
Therefore, the validation of satellite-derived SST products in terms of assessing their quality levels is of critical importance. The extent to which the available satellite data can contribute to our understanding of coastal processes depends on the quality of the satellite products and the reliability of the quality levels.
Many satellites map SST at different spatial resolutions (1–25 km) using thermal infrared bands [
10]. The most commonly used infrared sensors for SST are the Visible Infrared Imaging Radiometer Suite (VIIRS) instrument onboard the NOAA/NASA Suomi NPP satellite, the Moderate Resolution Imaging Spectroradiometer (MODIS) onboard the NASA Earth Observing System (EOS) Terra and Aqua satellites, the Advanced Very High-Resolution Radiometer (AVHRR) on NOAA’s Polar-orbiting Operational Environmental Satellites (POES), the Along-Track Scanning Radiometer (ATSR) on the European Remote Sensing Satellite (ERS-2) and the Geostationary Operational Environmental Satellite (GOES) Imager. However, these infrared sensors are highly affected by scattering from atmospheric vapor, leading to uncertainties and data gaps in cloud-covered areas [
7,
11,
12].
Satellite microwave sensors are also used to measure SST [
13,
14]. The microwave sensors record the energy emitted by the atmosphere, reflected or emitted by the ocean, or the radiance transmitted from the subsurface (SST
sub-skin), and these data are converted into temperature information. Unlike thermal infrared radiation, longer wavelength microwave radiation can penetrate through clouds, haze, and precipitation, providing SST data in all weather conditions and at night. However, the derived spatial resolution is about 25 km which may be insufficient to detect submesoscale and mesoscale variability. Some examples of microwave sensors include the Scanning Multichannel Microwave Radiometer (SMMR) carried on the Nimbus-7 and Seasat satellites, the Tropical Rainfall Measuring Mission (TRMM) Microwave Imager (TMI), the Advanced Microwave Scanning Radiometer (AMSR) instrument on the NASA’s EOS Aqua satellite and the Japanese Advanced Earth Observing Satellite (ADEOS II). Microwave data have coarser spatial resolution and lower accuracy than the infrared data, and are also sensitive to surface roughness and precipitation [
15].
In situ measurements to validate satellite products of SST are typically made using buoys [
16,
17,
18] and Argo floats [
19]. However, there are significant practical limitations [
3,
20]. More specifically, they only measure at a specific geographic location and therefore are unable to document mesoscale and sub-mesoscale variability. Another difference is that in situ measurements typically measure SST at a depth of a few centimeters below the surface (bulk SST/SST
depth), rather than skin or sub-skin temperature (SST
sub-skin), as is the case with thermal infrared and passive microwave sensors, respectively. The differences between SST
skin and bulk SST increase under wind-free conditions or when large amounts of incoming solar radiation reach the ocean surface. As a result, there may be differences between skin temperature and temperatures at several meters of depth. These differences should be taken into account when validating satellite measurements derived from either thermal infrared or passive microwave sensors.
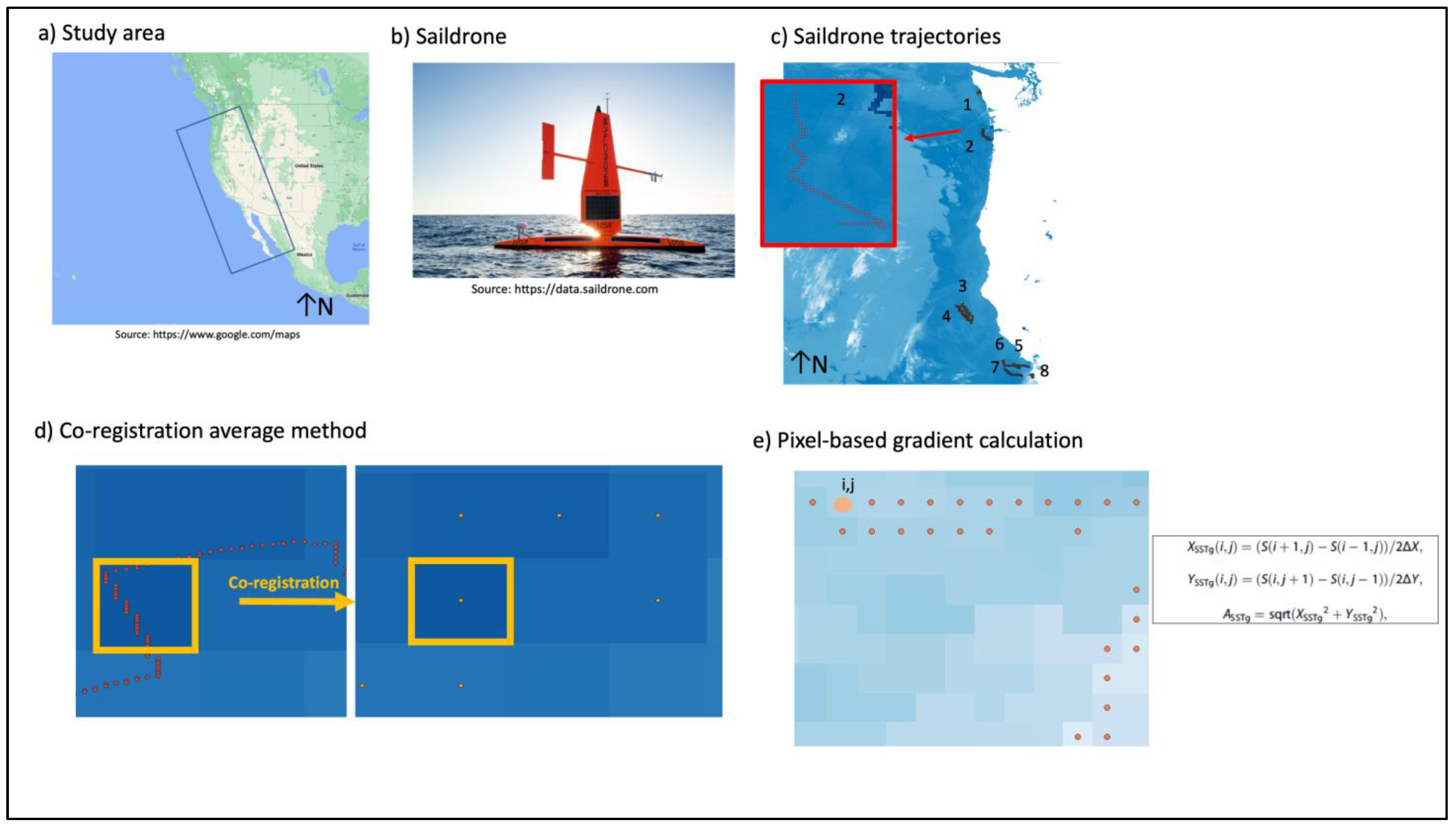
A recently developed uncrewed surface vehicle (USV) technology called Saildrone samples the ocean surface every minute and provides multiple measurements of the ocean surface, including the skin (SST
skin) and the SST a few centimeters below the surface (bulk SST/SST
depth) (
https://www.saildrone.com/, accessed on 1 June 2022). The ability of the Saildrone to sample the ocean surface with high temporal resolution and increased spatial coverage due to its autonomous, rapid navigation allows for a better comparison with satellite data than the traditional in situ measurements mentioned above. Saildrones also allow the extraction of spatial gradients of the ocean parameter of interest due to their high spatiotemporal resolution [
5].
To observe dynamic coastal phenomena such as the upwelling at small scales, a combination of infrared, microwave, and in situ data is promising. In this context, NASA’s Multi-scale Ultra-high Resolution (MUR) SST product of the Group for High-Resolution Sea Surface Temperature (GHRSST) combines data from different sources. The current version of MUR (Version 4.1,
http://dx.doi.org/10.5067/GHGMR-4FJ04, accessed on 1 June 2022) combines MODIS SST retrievals at a high spatial resolution of about 1 km, Advanced Very High-Resolution Radiometer (AVHRR) infrared SST retrievals at a medium resolution of 4 to 8.8 km, and microwave SST retrievals at a coarser spatial resolution of 25 km. This combination aims to fill the data gaps in areas where only infrared or microwave data are available [
21]. The approach used in the MUR data maximizes the use of the infrared data, where available, from MODIS (level-2 product) and AVHRR. MUR is globally gridded at 1 km resolution and available in daily maps using an interpolation technique based on a wavelet decomposition [
22].
This paper presents a validation of MODIS level-2 (L2P) and MUR level-4 SST products over the California Coast. We also examine the MODIS level-2 quality levels characterization along the California Coastal region. This is the first study to compare MODIS level-2 (L2P) with MUR level-4 SST products over the California Coast. It is also the first study that attempts to validate MODIS level-2 (L2P) data from a spatiotemporal perspective by applying the different quality levels off the California Coast. MODIS L2P data are the main input for the production of the level-4 gridded SST MUR products and therefore the validation of their quality is crucial. Their quality is documented by the quality levels that have been established during the primary data processing. MUR uses only the MODIS pixels of good-quality (quality level 5). Otherwise, the interpolation to fill the pixels where no MODIS data were found, or where quality level 5 pixels are not available, is done using data of coarser spatial resolution. More specifically, it uses AVHRR data from 4 km to 8.8 km or microwave data from the Advanced Microwave Scanning Radiometer (AMSR-E), the WindSat Polarimetric Radiometer, and the Advanced Microwave Scanning Radiometer 2 (AMSR2), as well as in situ data [
22] are used.
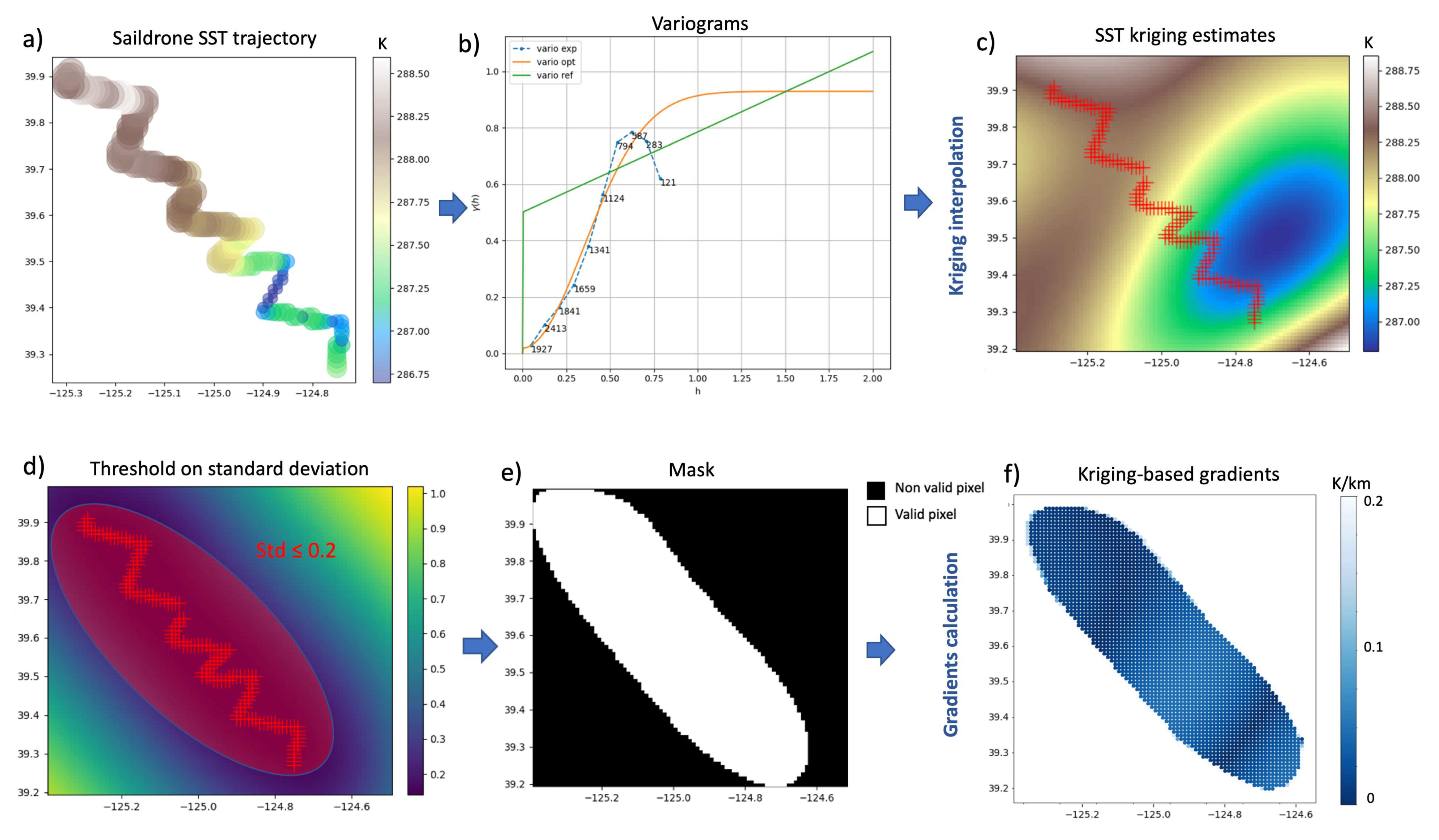
Assessing the quality levels of MODIS level-2 data is important because incorrectly characterizing a pixel as “bad-quality” or “good-quality” will lead to incorrect exclusion or inclusion, respectively, of that particular pixel from the final SST product. In the former case, erroneous exclusion can lead to unneeded data interpolation thus reducing the accuracy of the final SST product. The validation of both MODIS level-2 and MODIS level-4 as well as of the quality levels of MODIS level-2 was carried out using the Saildrone data due to its ability to sample the sea surface of coastal areas at high spatial and temporal resolution. The validation was performed at the pixel level. Gradients were also calculated to test the ability of 1km satellite products to correctly estimate thermal gradients. The gradients are of particular importance because of they assist the understanding of the coastal SST patterns and the associated upwelling phenomena. Despite the rapid coverage of large areas that Saildrones provide, they are often only launched close to the coast. Therefore, the ability to interpolate Saildrone-based SST values in unsampled areas outside the coast can help to validate satellite products over a larger spatial extent. To achieve this, this study used kriging interpolation to predict the Saildrone SST values in unsampled locations by taking into account the spatial correlation between sampled SST values [
23].
The choice of the California Coast as the study area was made because it is a highly productive coastal ecosystem due to the California Current [
24,
25]. Coastal upwelling is the dominant physical phenomenon affecting production in the California Current system. It occurs from April to September when strong northerly winds blow along the Oregon and Washington coasts. This seasonal cold water is associated with high production by phytoplankton which is the base of the food chain, attracting large numbers of consumers and leading to one of the most productive fisheries in the world. These fisheries play a key role in the economy and culture of the California Current (
https://ecowatch.noaa.gov/regions/california-current).
In this current study, we focus specifically on:
Per-pixel validation of SST values from satellite products using Saildrone data
Assessing the quality levels of MODIS level-2 data
Estimation of the SST gradients using pixel-based and kriging approaches from the Saildrone data and comparison with those estimated directly from the satellite products.
In the following sections, we present the methods we used for the SST and gradient validations, as well as a description of the results and discussion compared to previous studies.
4. Discussion
4.1. Accuracies Compared to Previous Saildrone Studies
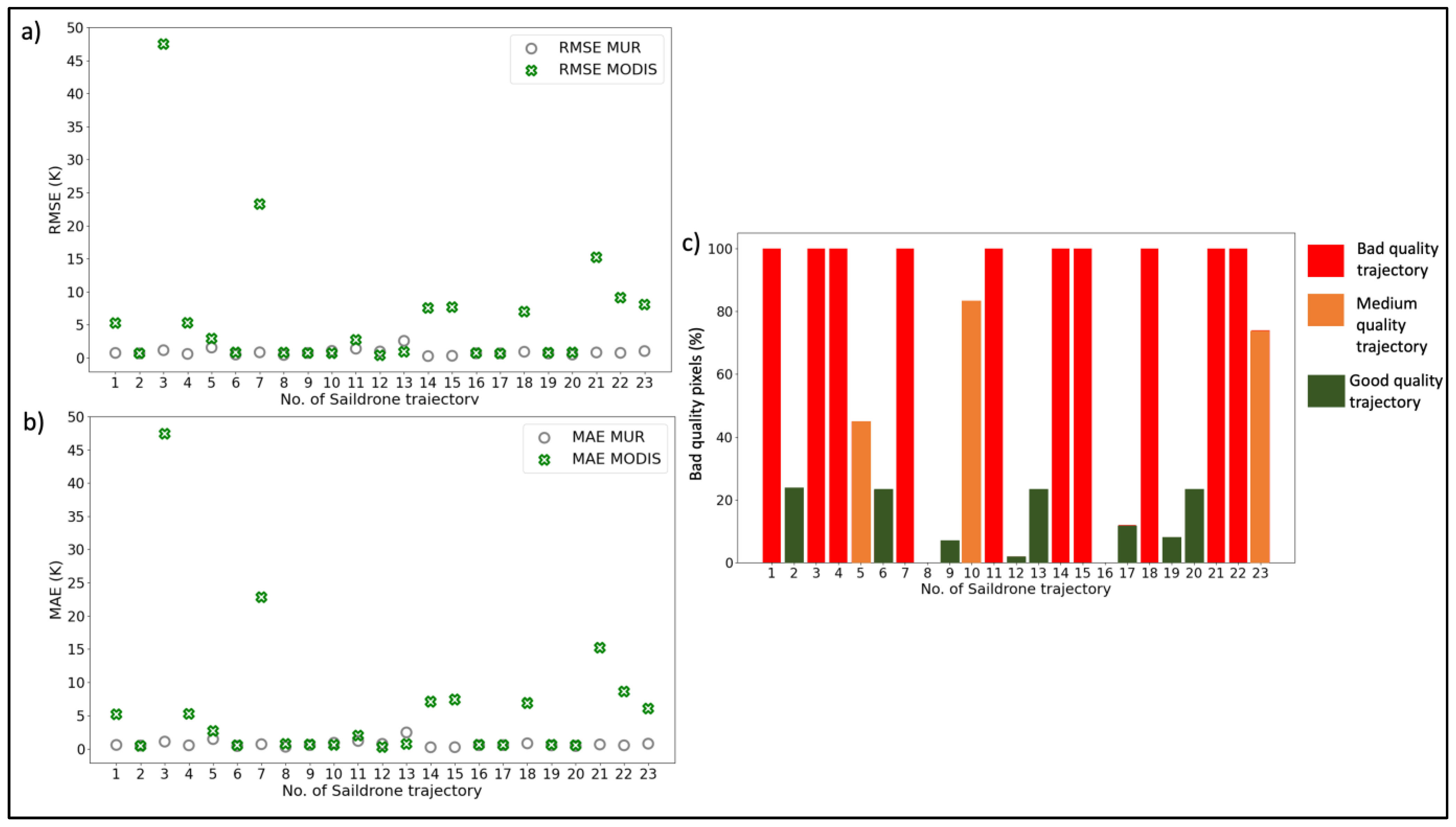
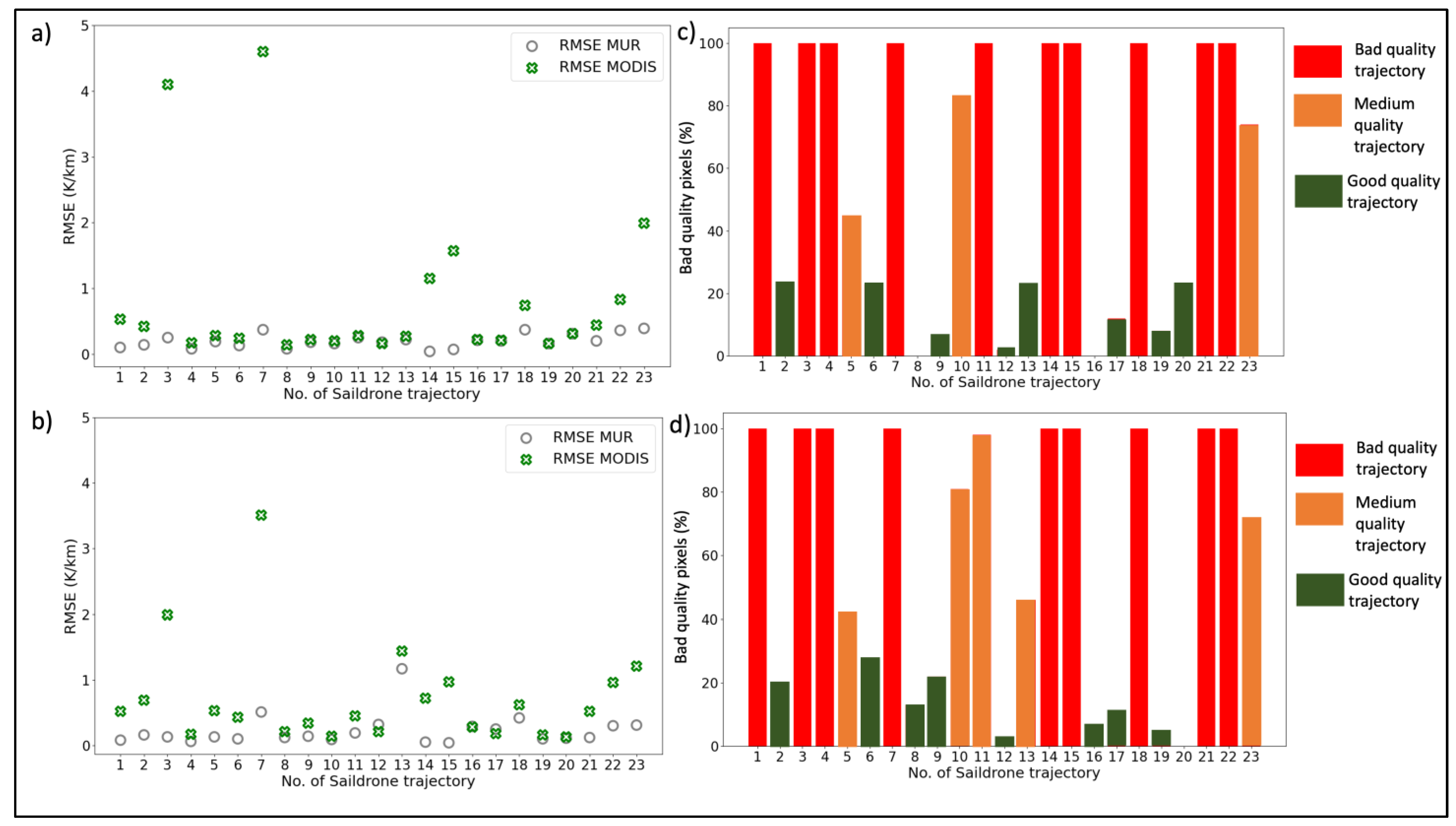
We derived mean SST RMSE of 0.86 and 4.64 K for MUR and MODIS, respectively (excluding the outlier of 50 K).
Our study showed higher bias and RMSE between SST MUR and Saildrone for most of the trajectories compared to a previous study conducted along the Baja California (bias of 0.32 deg Celsius and RMSE of 0.42 deg Celsius) [
27]. However, compared to another study that compared MUR SST with two Saildrone deployments over the Arctic and Alaskan coastal waters which derived RMSE of about 7 and 9 deg Celsius [
28], our results are more promising in terms of the accuracy of the MUR products (we found a maximum RMSE of 2.57 K).
The high gradient values we obtained in most trajectories are due to the coastal upwelling that occurs within the distance of 100 km from the California Coast. An earlier study over the California Coast derived SST gradients greater than 0.1 deg Celcius/km [
29]. Similar results for the same area are derived from the recent study by Vazquez-Cuervo et al., 2023 who found gradients for MUR products as high as 1 K/km [
5]. They also found very similar results for the MUR RMSE (0.21 K/km) compared to ours (mean RMSE MUR of 0.19 K/km for the pixel-based gradient approach and 0.23 K/km for the kriging-based approach). Therefore, our RMSE values for the MUR gradients are reasonable considering the ocean dynamics of the California Coast due to the California Current System. Comparing the gradients between MUR and Saildrone over Peru and Chile, ref. [
30] identified the maximum magnitude of the gradients up to 0.03 K/km. In our study, the maximum magnitude of the MUR gradient was higher, even reaching 0.8 K/km.
Since no previous studies have validated MODIS level-2 over the California Coast, we were not able to compare our results with previous studies specifically for our study area. The mean SST MODIS RMSE of 4.64 K and the mean gradient RMSE of 0.71–0.81 K/km are rather high compared to the MUR RMSE of our study and the previous studies over the California Coast. These high inaccuracies indicate the poor quality of MODIS level-2 data in coastal areas, especially over summer months when there is increased cloud cover. In the next section, we compare our results for MODIS with previous MODIS studies conducted in other areas around the world.
4.2. Accuracies Compared to Previous MODIS Studies
Comparing our MODIS results in terms of RMSE SST with previous studies conducted in other study areas, we conclude that our MODIS RMSE values are rather high.
More specifically, ref. [
31] found a bias of 0.19–0.34 deg Celsius within the MODIS data in the South China Sea when compared with in situ data 5 m below the surface. Comparison with coastal buoys extracted RMSE between 0.36 and 1.42 degree Celsius over the Bay of Bengal, India [
32], lower than in our study. Reference [
33] compared MODIS level-2 with SST
depth buoys-based measurements over the Persian Gulf and found a bias of 0.07 degree Celsius at 63 measurement points and a RMSE of 0.53 degree Celsius.
The high RMSE and MAE values of the MODIS products that were found close to the coast, confirm the poor quality of the infrared data in cloud-covered areas, as also found in the study by [
18]. In fact, in the vicinity of the coast, there are only bad-quality pixels due to high cloud cover during the summer months. We have also seen in
Section 3.1.3 that the MODIS signal is very noisy and noisier than the corresponding MUR signal. One reason that could explain the high noise within the MODIS level-2 product, is the fact that since it is a level-2 product it is still at an early stage of processing where not all noise sources have been eliminated. Other reasons that may explain the much noisier MODIS signal, such as errors related to sensor characteristics are subjects for future investigations and are beyond the scope of this study.
Regarding the MUR products, beyond the comparisons we made between them and the Saildrone and MODIS data, we could not perform further analysis to assess the per-pixel quality of the interpolation as we did for the MODIS quality levels. This is because we did not have information available on exactly which data (AVHRR, microwave, in situ) were used to interpolate each pixel when MODIS level-5 data were not available.
4.3. Source of Errors Due to Saildrone
Existing literature has already demonstrated the efficiency of averaging Saildrone values for co-registration with the satellite products [
27,
28,
29]. The Euclidean distance co-registration method was also tested on our dataset and gave similar results to the averaging co-registration method. The Saildrone is a wind-powered vehicle and therefore shifts in its trajectory are expected. Although no SST differences of more than half a K were found within pixels for the Saildrone trajectories, averaging for co-registration purposes could also introduce uncertainties. In addition, the Saildrone can detect SST changes at higher spatiotemporal resolutions (sub-kilometer and sub-daily) than the corresponding satellite products, which also explains the discrepancies [
27].
4.4. Source of Errors Due to Mismatches between the Instruments
There are differences in what the three instruments explicitly measure, both in space and in time. MODIS L2P maps SST
skin whereas MUR is tuned to a bulk temperature by using only nighttime retrievals. Thus, the issue of diurnal variability could still be a factor in the measured differences between the three data sets. Saildrone sensor used in this current study measures bulk SST/SST
depth at 0.6 m below the surface. The Saildrone sensor that measures SST
skin is also under development, according to a recent study [
34], and this will also improve the ability of Saildrones to validate satellite SST products.
In addition, MUR uses a 5-day window for the interpolation, unlike MODIS and Saildrone data which refer to a specific acquisition time and day, respectively. As a consequence, the three datasets also have a temporal mismatch with respect to the SST values they measure: MUR includes only nighttime measurements, and MODIS level-2P SST corresponds to a specific time which we tried to be as close as possible to a nighttime measurement to coincide with the MUR SST. However, it was not always possible to find good MODIS data due to the high cloud contamination problems during this period of the year. The Saildrone data corresponded to a whole 24 h time window, including both day and night measurements, with the assumption that SST variations measured by the sensor within a day are negligible.
4.5. Assessment of the MODIS Quality Levels and the MUR Interpolation
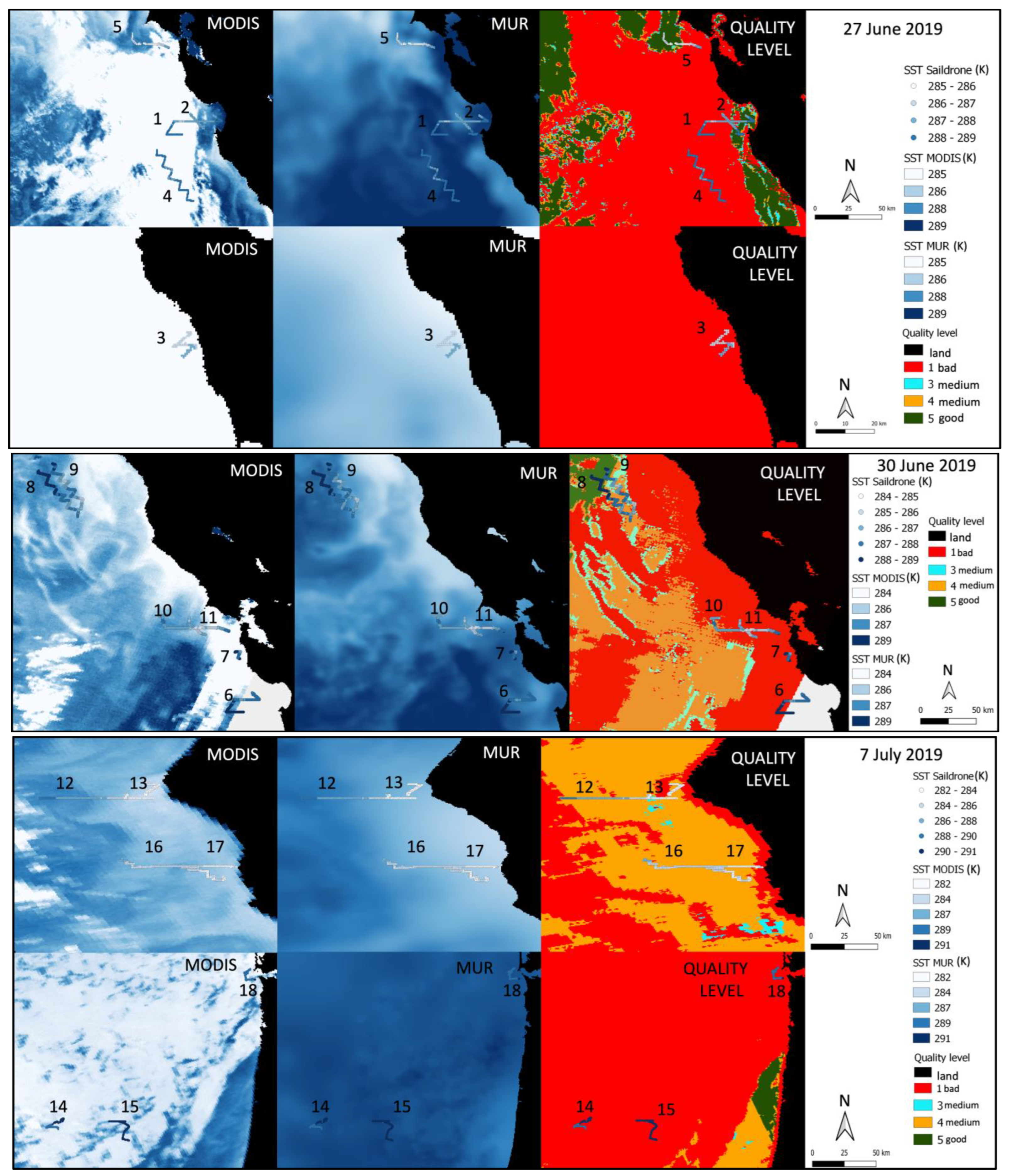
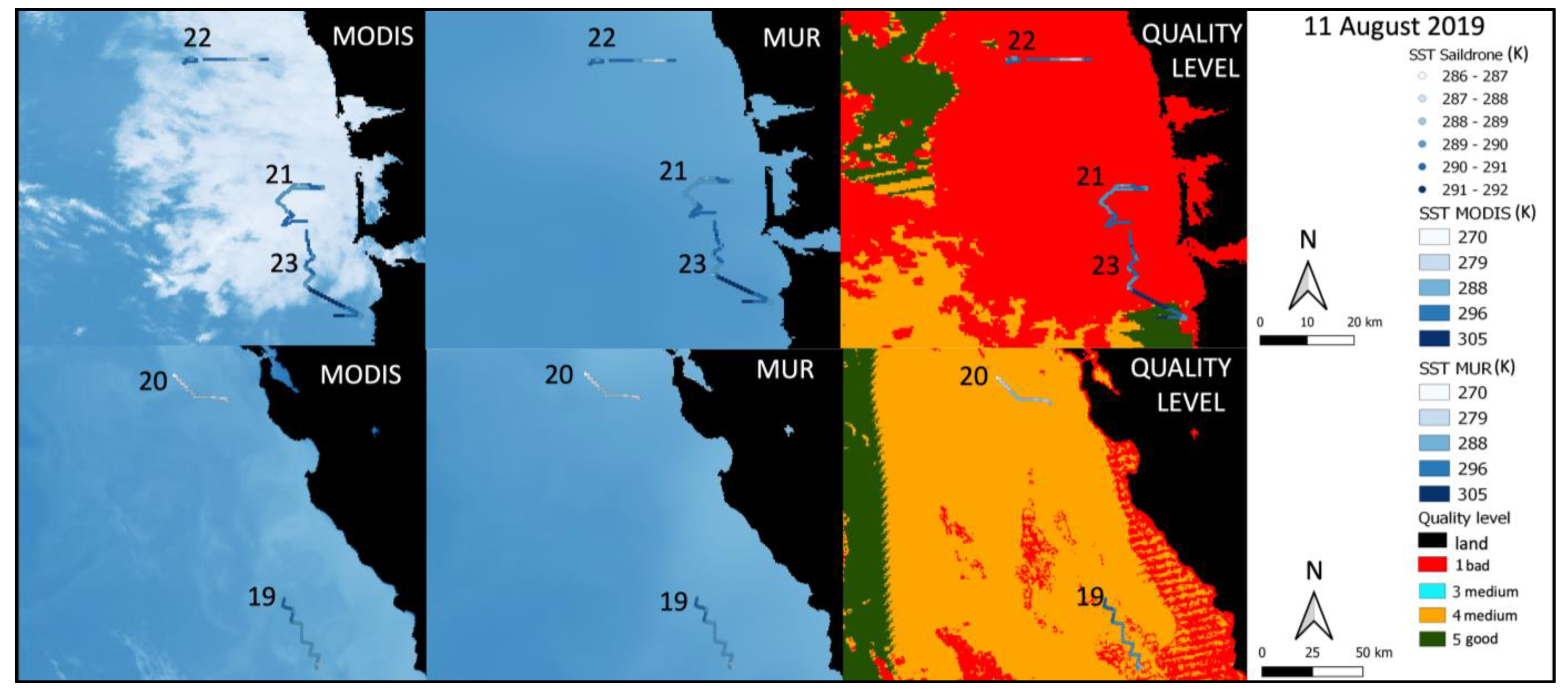
Regarding the assessment of the characterization of the quality levels of the MODIS products, the characterization of the bad-quality pixels is generally accurate. As can be seen from the analysis of the SST and the gradients, pixels characterized as bad-quality pixels during the production of the level-2 MODIS product are indeed bad pixels/values and are correctly excluded from the production of the gridded SST maps. These areas consisting mainly of bad pixels are those close to the coast, and therefore we can conclude that the characterization of the MODIS quality level seems to be valid in areas close to the coast that are covered by clouds. This result confirms the low quality of MODIS level-2 data that we can obtain in coastal areas due to factors such as cloud cover and erroneous atmospheric correction [
35].
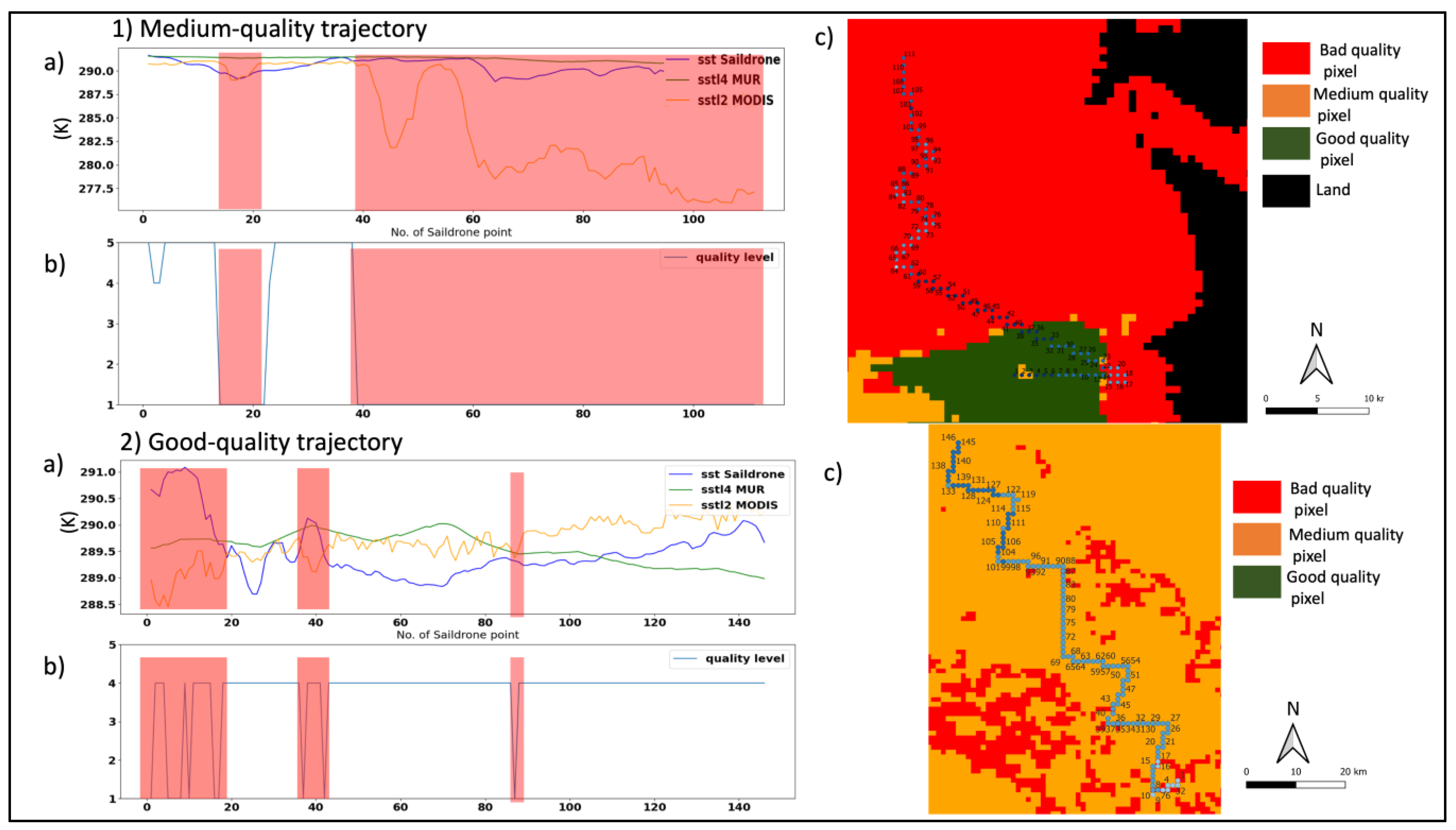
The results for the medium and good-quality trajectories imply that some pixels have been misclassified as medium or good-quality pixels when they appear to correspond to bad-quality pixels. Conversely, some pixels have been classified as bad-quality when they appear to correspond to medium or good-quality pixels. As a result, they are erroneously included or excluded in the production of the gridded SST maps, respectively, during the processing of the MODIS level-2 products. Furthermore, the misclassification of some pixels as ‘‘bad-quality pixels’’ results in data loss and interpolation for the creation of the SST maps in pixel areas that is not needed. Therefore, the interpolation to produce the level-4 MUR product contains errors which can explain the increased RMSE and MAE values for the MUR in some good and medium-quality trajectories. This inaccurate interpolation in some pixels indicates that the level-2 MODIS product may be more accurate than the corresponding level-4 MUR, even though the former is a level-2 dataset in a primary data processing step with some sources of error not yet removed. In addition, the process of assigning quality levels to each pixel is an area of ongoing research.
An interesting potential study which was not investigated in this study is the assessment of the quality levels relevant to the distance from the coast.
4.6. Comparing Both Gradient Approaches
The use of a larger pixel window around the Saildrone trajectory within the kriging-based approach was made to avoid using only the pixels within the Saildrone trajectory and to have a better representation of the area around the trajectory. Using only the pixels within the trajectory and considering that the Saildrone trajectories may contain shifts due to the wind (see
Section 4.3), inaccuracies in the x and y coordinates can lead to incorrect estimates of gradients using Formula (1). In fact, the results of the kriging-based approach are more promising, as they generally show lower RMSE values for the MODIS products than the results of the pixel-based approach.
In addition, the kriging interpolation method is useful because the Saildrones are mainly launched near the coast and therefore there is a lack of data far away from the coast. By interpolating the SST sampled Saildrone values in areas away from the coast, we “generate” in situ data in areas where we do not yet have Saildrones deployments. This allows us to produce new datasets for the validation of satellite products, with the high spatial and temporal resolution of Saildrones. Our work can also indicate to future researchers where are the areas that need to be validated in more detail and therefore where in situ instruments need to be deployed. Such areas appear to be those far away from the coast. For the areas close to the coast, we have shown that the quality of level-2 MODIS is very low (very high or complete cover from bad pixels) and that the characterization of the quality levels of MODIS is already generally accurate.
More advanced interpolation approaches, such as taking into account correlations between Saildrone and satellite products could be further explored in future work.
The methods used in this study can also be applied to other study areas as well. Our study provides a basis for investigating the magnitude of phenomena such as coastal upwelling, especially with the integration of additional parameters such as chlorophyll-a provided by satellites and Saildrones. Additionally, our study was focused on the summer months, so it could be interesting to replicate our work during the winter months when the cloud cover is potentially lower and we, therefore, expect level-2 MODIS SST data of better quality.
5. Conclusions
From the comparisons between Saildrone and satellite products using the pixel-based SST approach, from all the trajectories we derived a mean RMSE of 0.86 and 4.64 K for MUR and MODIS respectively (excluding the outlier). From the gradient approaches, we derived a mean RMSE of 0.19 and 0.84 K/km for MUR and MODIS for the pixel-based approach, and a mean RMSE of 0.23 and 0.71 K/km for MUR and MODIS for the kriging-based approach. These results for MUR are promising considering the results of previous studies and the influence of the dynamics of the coastal upwelling over the California Coast. The results for MODIS show rather high inaccuracies compared to the corresponding MUR products and other studies over different study areas. The high inaccuracies for MODIS deriving from our study highlight the poor-quality of MODIS level-2 data near the coast, especially during summer.
Our comparisons with Saildrone data also showed that for the bad-quality trajectories the MUR interpolated product was more accurate than the MODIS. For the medium and good-quality trajectories, MUR was generally more accurate than MODIS, with some exceptions. These exceptions reveal possible inaccuracies within the processes of characterizing the quality level of MODIS pixels and the interpolation process for producing the MUR level-4 gridded product.
The pixel-based gradient approach gave similar results to the kriging-based approach, with the kriging-based approach being more accurate in terms of RMSE for MODIS. Kriging interpolation is an approach to generate SST data in areas where Saildrone deployments are still lacking, and to indicate where future campaigns should be conducted. The latter is important as more data acquisitions away from the coast are needed to better validate the satellite products.
The characterization of MODIS quality levels appears to be generally valid for the bad-quality pixels especially in coastal areas, but less valid for the medium and bad-quality pixels. Further research on the assessment of the MODIS quality levels is needed, for example in relation to distance from the coast.
Considering all the above-mentioned results, the Saildrone technology proved to be efficient in validating ocean satellite products due to its high spatial and temporal sampling capabilities compared to traditional in situ measurement techniques. This current study shows that high spatiotemporal in situ data can be successfully used to validate ocean SST products, both for pixel-level SST values and SST gradients. There are promising areas for further research, such as the use of Saildrone data to detect sub-pixel SST variations and to downscale satellite products using machine learning techniques.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






