
Multi-Constrained Seismic Multi-Parameter Full Waveform Inversion Based on Projected Quasi-Newton Algorithm


Abstract
:1. Introduction
2. Multi-Constrained, Multi-Parameter FWI Based on PQN Algorithm
2.1. Multi-Constrained Strategy and Objective Function
- (1)
- Bound constraint
- (2)
- Gradient constraint
- (3)
- Rock-physical constraint
2.2. PQN Algorithm
| Algorithm 1. Caption Multi-constrained FWI based on the PQN |
| Given: // initial model, // observed data , , … // Solve the corresponding projection for each constraint set by ADMM Set While not Convergence Do // Objective function at the kth iteration // Gradient at the kth iteration // Add the adjustment factor // the quasi-Newton direction at the kth iteration If k = 0 then else // the update direction at the kth iteration While // Wolfe conditions Do // Update model parameter Convergence = // Check convergence |
3. Numerical Examples
3.1. 1994BP Model
3.1.1. Comparison Experiment of the SPG and the PQN Algorithms
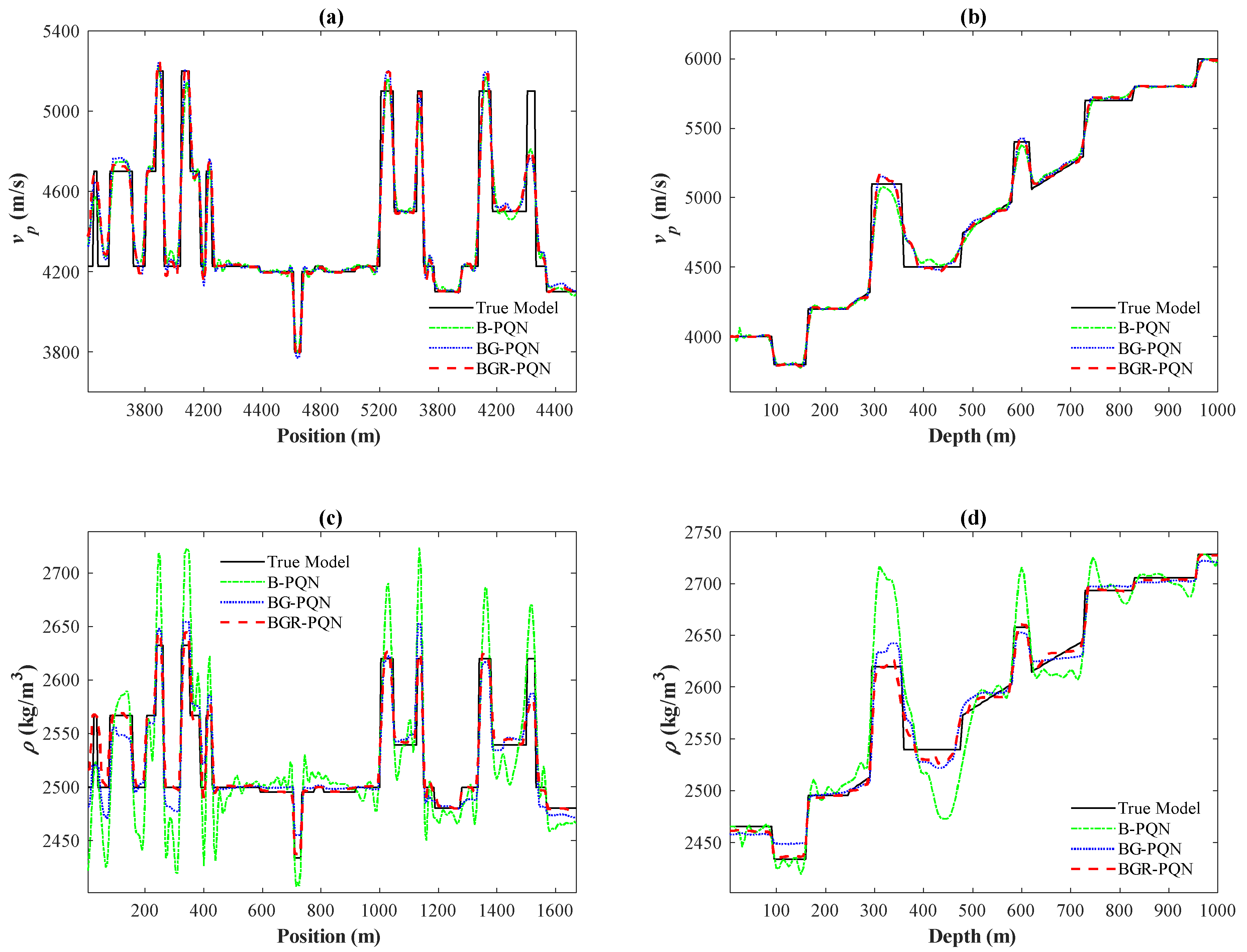
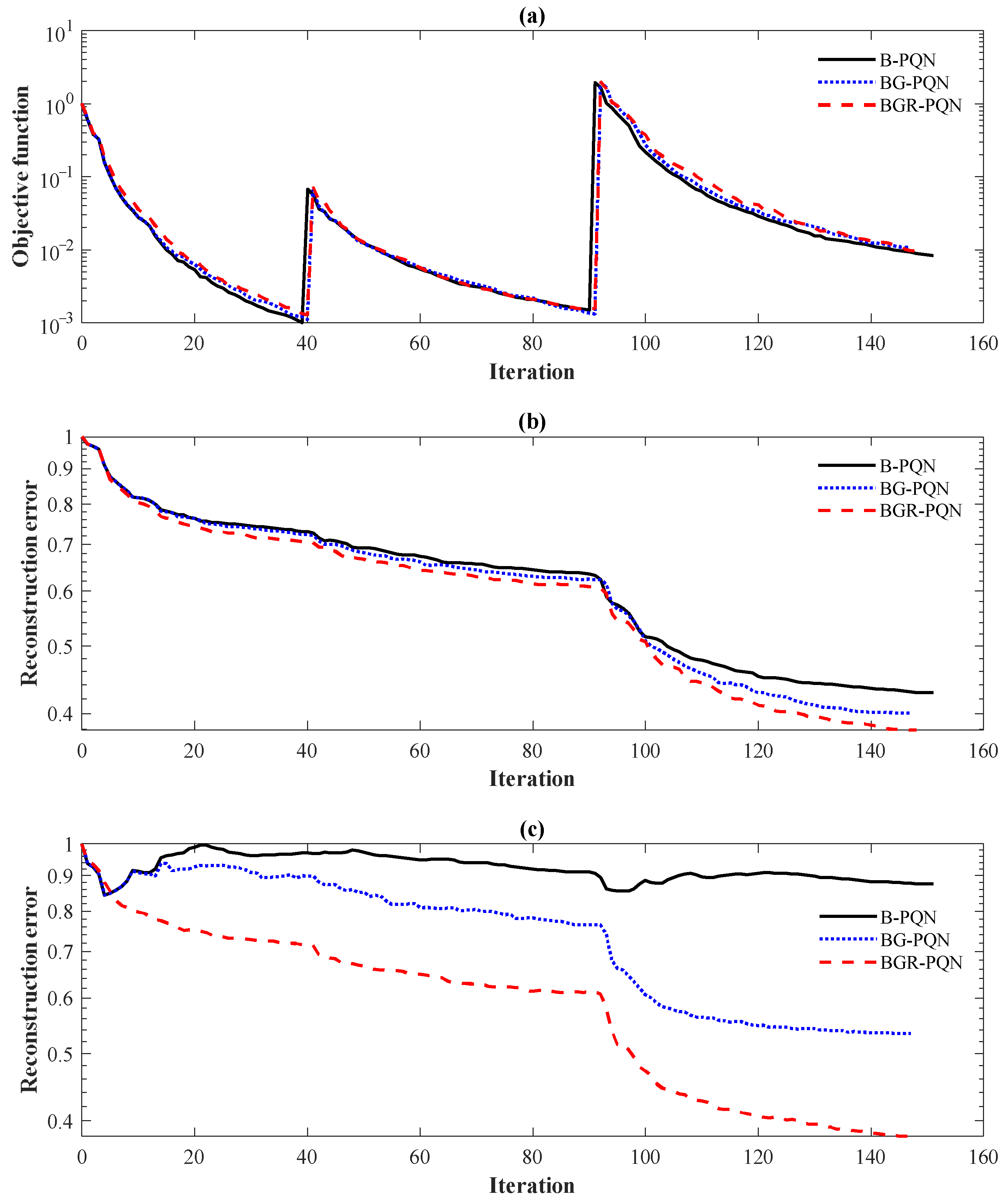
3.1.2. Multi-Constrained FWI Based on the PQN Algorithm
3.2. Overthrust Model
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Tarantola, A. Inversion of seismic reflection data in the acoustic approximation. Geophysics 1984, 49, 1259–1266. [Google Scholar] [CrossRef]
- Mora, P.; Wu, Z. Elastic versus acoustic inversion for marine surveys. Geophys. J. Int. 2018, 14, 596–622. [Google Scholar] [CrossRef]
- Takougang, E.M.T.; Ali, M.Y.; Bouzidi, Y.; Bouchaala, F.; Sultan, A.A.; Mohamed, A.I. Characterization of a carbonate reservoir using elastic full-waveform inversion of vertical seismic profile data. Geophys. Prospect. 2020, 68, 1944–1957. [Google Scholar] [CrossRef]
- Shi, Y.M.; Yao, F.C.; Sun, H.S.; Qi, L. Density inversion and porosity estimation. Chin. J. Geophys-Chin. 2010, 53, 197–204. [Google Scholar]
- Jeong, W.; Lee, H.Y.; Min, D.J. Full waveform inversion strategy for density in the frequency domain. Geophys. J. Int. 2012, 188, 1221–1242. [Google Scholar] [CrossRef]
- Yang, J.Z.; Liu, Y.Z.; Dong, L.G. A multi-parameter inversion strategy for acoustic media with variable density. Chin. J. Geophys. 2014, 57, 628–643. [Google Scholar]
- Zhang, Z.D.; Alkhalifah, T.; Naeini, E.Z.; Sun, B. Multiparameter elastic full waveform inversion with facies-based constraints. Geophys. J. Int. 2018, 213, 2112–2127. [Google Scholar] [CrossRef]
- Sun, M.; Jin, S. Multiparameter elastic full waveform inversion of ocean bottom seismic four-component data based on a modified acoustic-elastic coupled equation. Remote Sens. 2020, 12, 2816. [Google Scholar] [CrossRef]
- Virieux, J.; Operto, S. An Overview of Full-Waveform Inversion in Exploration Geophysics. Geophysics 2009, 74, WCC127–WCC152. [Google Scholar] [CrossRef]
- Operto, S.; Gholami, Y.; Prieux, V.; Ribodetti, A.; Brossier, R.; Metivier, L.; Virieux, J. A guided tour of multiparameter full-waveform inversion with multicomponent data: From theory to practice. Lead. Edge 2013, 32, 1005–1176. [Google Scholar] [CrossRef]
- Song, C.; Alkhalifah, T. An efficient wavefield inversion for transversely isotropic media with a vertical axis of symmetry. Geophysics 2020, 85, R195–R206. [Google Scholar] [CrossRef]
- Vogel, C.R. Computational Methods for Inverse Problems; SIAM Press: Philadelphia, PA, USA, 2002. [Google Scholar]
- Asnaashari, A.; Brossier, R.; Garambois, S.; Audebert, F.; Thore, P.; Virieux, J. Regularized seismic full waveform inversion with prior model information. Geophysics 2013, 78, R25–R36. [Google Scholar] [CrossRef]
- Gao, K.; Huang, L. Acoustic- and elastic-waveform inversion with total generalized p-variation regularization. Geophys. J. Int. 2019, 218, 933–957. [Google Scholar] [CrossRef]
- Feng, D.S.; Wang, X.; Wang, X.Y. New Dynamic Stochastic Source Encoding Combined with a Minmax-Concave Total Variation Regularization Strategy for Full Waveform Inversion. IEEE Tran. Geosci. Remote Sens. 2020, 58, 7753–7771. [Google Scholar] [CrossRef]
- Aghamiry, H.S.; Holami, A.; Operto, S. Compound Regularization of Full-Waveform Inversion for Imaging Piecewise Media. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1192–1204. [Google Scholar] [CrossRef]
- Du, Z.; Liu, D.; Wu, G.; Cai, J.; Yu, X.; Hu, G. A high-order total-variation regularisation method for full-waveform inversion. J. Geophys. Eng. 2021, 18, 241–252. [Google Scholar] [CrossRef]
- Qu, S.; Verschuur, E.; Chen, Y. Full-waveform inversion and joint migration inversion with an automatic directional total variation constraint. Geophysics 2019, 84, R175–R183. [Google Scholar] [CrossRef]
- Peters, B.; Herrmann, F.J. Constraints versus penalties for edge-preserving full-waveform inversion. Lead. Edge 2017, 36, 94–100. [Google Scholar] [CrossRef]
- Lin, Y.; Huang, L. Acoustic- and elastic-waveform inversion using a modified total-variation regularization scheme. Geophys. J. Int. 2015, 200, 489–502. [Google Scholar] [CrossRef]
- Smithyman, B.R.; Peters, B.; Herrmann, F.J. Constrained waveform inversion of colocated VSP and surface seismic data. In Proceedings of the 77th EAGE Conference and Exhibition, Madrid, Spain, 1–4 June 2015. [Google Scholar]
- Birgin, E.G.; Martínez, J.M.; Raydan, M. Nonmonotone spectral projected gradient methods on convex sets. SIAM J. Optim. 2000, 10, 1196–1211. [Google Scholar] [CrossRef]
- Xu, H.K. Averaged Mappings and the Gradient-Projection Algorithm. J. Optim. Theory Appl. 2011, 150, 360–378. [Google Scholar] [CrossRef]
- Yao, Y.; Liou, Y.C.; Wen, C.F. Variant Gradient Projection Methods for the Minimization Problems. Abstr. Appl. Anal. 2012, 2012, 792078. [Google Scholar] [CrossRef]
- Gomes-Ruggiero, M.A.; Martinez, J.M.; Santos, S.A. Spectral projected gradient method with inexact restoration for minimization with nonconvex constraints. SIAM J. Sci. Comput. 2009, 31, 1628–1652. [Google Scholar] [CrossRef]
- Peters, B.; Smithyman, B.R.; Herrmann, F.J. Projection methods and applications for seismic nonlinear inverse problems with multiple constraints. Geophysics 2019, 84, R251–R269. [Google Scholar] [CrossRef]
- Jiang, W. 3-D joint inversion of seismic waveform and airborne gravity gradiometry data. Geophys. J. Int. 2020, 223, 746–764. [Google Scholar] [CrossRef]
- Rao, J.; Yang, J.; Ratasseppc, M.; Fan, Z. Multi-parameter reconstruction of velocity and density using ultrasonic tomography based on full waveform inversion. Ultrasonics 2020, 101, 106004. [Google Scholar] [CrossRef] [PubMed]
- Xu, K.; McMechan, G.A. 2D frequency-domain elastic full-waveform inversion using time-domain modeling and a multistep-length gradient approach. Geophysics 2014, 79, R41–R53. [Google Scholar] [CrossRef]
- Alkhalifah, T. Scattering-angle based filtering of the waveform inversion gradients. Geophys. J. Int. 2014, 200, 363–373. [Google Scholar] [CrossRef]
- Cheng, J.; Alkhalifah, T.; Wu, Z.; Zou, P.; Wang, C. Simulating propagation of decoupled elastic waves using low-rank approximate mixed-domain integral operators for anisotropic media. Geophysics 2016, 81, T63–T77. [Google Scholar] [CrossRef]
- Wang, T.F.; Cheng, J.B. Elastic full waveform inversion based on mode decomposition: The approach and mechanism. Geophys. J. Int. 2017, 209, 606–622. [Google Scholar] [CrossRef]
- Schmidt, M.; Berg, E.; Friedlander, M.P.; Murphy, K. Optimizing Costly Functions with Simple Constraints: A Limited-Memory Projected Quasi-Newton Algorithm. Artif. Intell. Stat. 2009, 5, 456–463. [Google Scholar]
- Kim, D.; Sra, S.; Dhillon, I.S. Tackling box-constrained optimization via a new projected quasi-newton approach. SIAM J. Sci. Comput. 2010, 32, 3548–3563. [Google Scholar] [CrossRef]
- van den Berg, E. A hybrid quasi-Newton projected-gradient method with application to Lasso and basis-pursuit denoising. Math. Program. Comput. 2020, 12, 1–38. [Google Scholar] [CrossRef]
- Rothermel, D.; Schuster, T. Solving an inverse heat convection problem with an implicit forward operator by using a projected quasi-Newton method. Inverse Probl. 2021, 37, 045014. [Google Scholar] [CrossRef]
- Liu, D.C.; Nocedal, J. On the limited memory BFGS method for large scale optimization. Math. Program. 1989, 45, 503–528. [Google Scholar] [CrossRef]
- Byrd, R.H.; Nocedal, J.; Schnabel, R.B. Representations of quasi-newton matrices and their use in limited memory methods. Math. Program. 1994, 63, 129–156. [Google Scholar] [CrossRef]
- Sirgue, L.; Pratt, R.G. Efficient waveform inversion and imaging: A strategy for selecting temporal frequencies. Geophysics 2004, 69, 231–248. [Google Scholar] [CrossRef]
- Boonyasiriwat, C.; Valasek, P.; Routh, P.S.; Cao, W.; Schuster, G.T.; Macy, B. An efficient multiscale method for time-domain waveform tomography. Geophysics 2009, 74, WCC59–WCC68. [Google Scholar] [CrossRef]
- Gardner, G.H.F.; Gardner, L.W.; Gregory, A.R. Formation velocity and density—The diagnostic basics for stratigraphic traps. Geophysics 1974, 39, 770–780. [Google Scholar] [CrossRef]
- He, B.S.; Yang, H.; Wang, S.L. Alternating direction method with self-adaptive penalty parameters for monotone variational inequalities. J. Optim. Theory Appl. 2000, 106, 337–356. [Google Scholar] [CrossRef]
- Yang, P.; Brossier, R.; Métivier, L.; Virieux, J. A review on the systematic formulation of 3-D multiparameter full waveform inversion in viscoelastic medium. Geophys. J. Int. 2016, 207, 129–149. [Google Scholar] [CrossRef]
- Bouchaala, F.; Ali, M.Y.; Matsushima, J. Compressional and shear wave attenuations from walkway VSP and sonic data in an offshore Abu Dhabi oilfield. Géoscience 2021, 353, 337–354. [Google Scholar] [CrossRef]
- Plessix, R.E. A review of the adjoint-state method for computing the gradient of a functional with geophysical applications. Geophys. J. Int. 2006, 167, 495–503. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strategy | Objective Function | Reconstruction Error of P-Wave Velocity | Reconstruction Error of Density | Calculation Time |
|---|---|---|---|---|
| B-SPG | 0.0216 | 0.4545 | 0.9154 | 10 h 25 min 36 s |
| B-PQN | 0.0083 | 0.4282 | 0.8760 | 3 h 55 min 10 s |
| Strategy | Objective Function | Reconstruction Error of P-Wave Velocity | Reconstruction Error of Density | Calculation Time |
|---|---|---|---|---|
| B-PQN | 0.0083 | 0.4282 | 0.8760 | 3 h 55 min 10 s |
| BG-PQN | 0.0109 | 0.4006 | 0.5337 | 5 h 3 min 26 s |
| BGR-PQN | 0.0098 | 0.3788 | 0.3800 | 5 h 7 min 57 s |
| Strategy | Objective Function | Reconstruction Error of P-Wave Velocity | Reconstruction Error of Density | Calculation Time |
|---|---|---|---|---|
| U-FWI | 1.1769 | 0.4399 | 0.4987 | 7 h 29 min 1 s |
| C-FWI | 1.1763 | 0.4392 | 0.4380 | 7 h 35 min 8 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, D.; Li, B.; Cao, C.; Wang, X.; Li, D.; Chen, C. Multi-Constrained Seismic Multi-Parameter Full Waveform Inversion Based on Projected Quasi-Newton Algorithm. Remote Sens. 2023, 15, 2416. https://doi.org/10.3390/rs15092416
Feng D, Li B, Cao C, Wang X, Li D, Chen C. Multi-Constrained Seismic Multi-Parameter Full Waveform Inversion Based on Projected Quasi-Newton Algorithm. Remote Sensing. 2023; 15(9):2416. https://doi.org/10.3390/rs15092416
Chicago/Turabian StyleFeng, Deshan, Bingchao Li, Cen Cao, Xun Wang, Dianbo Li, and Cheng Chen. 2023. "Multi-Constrained Seismic Multi-Parameter Full Waveform Inversion Based on Projected Quasi-Newton Algorithm" Remote Sensing 15, no. 9: 2416. https://doi.org/10.3390/rs15092416