
Recent Advances in Crop Disease Detection Using UAV and Deep Learning Techniques





Abstract
:1. Introduction
- (i)
- We present the importance of different UAV platforms and sensors for improving crop disease detection.
- (ii)
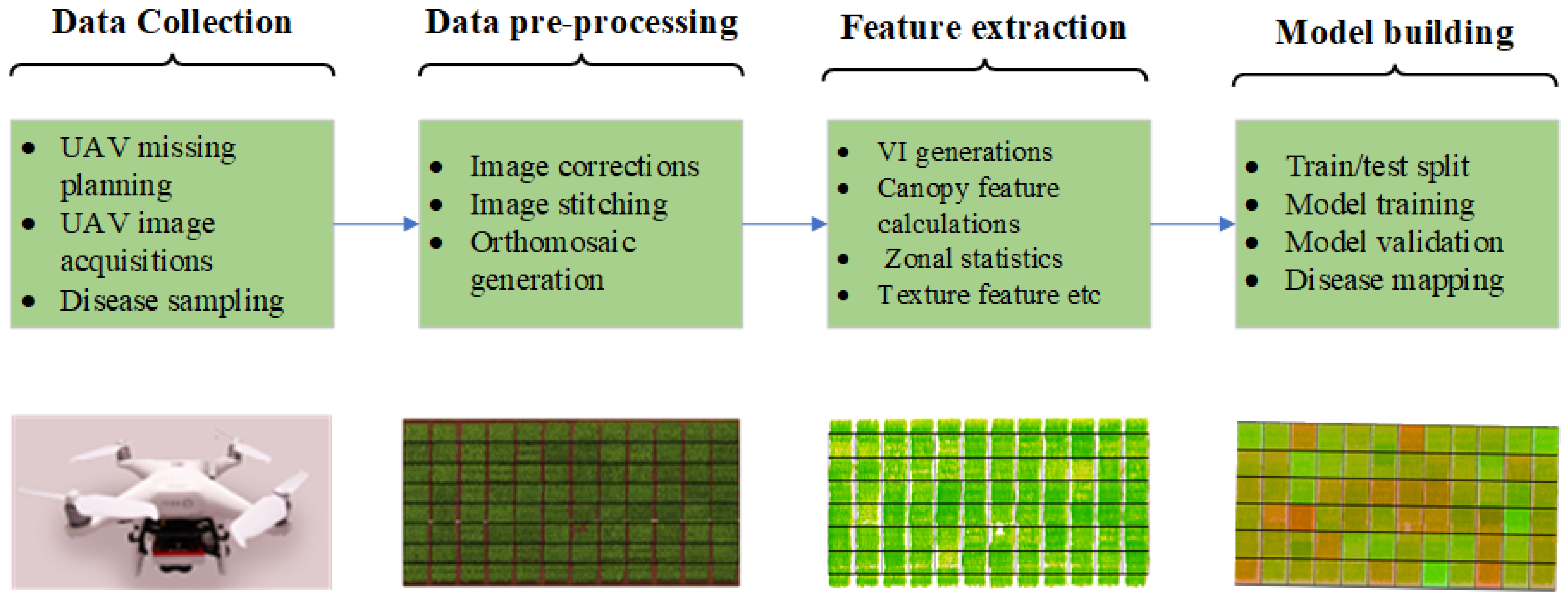
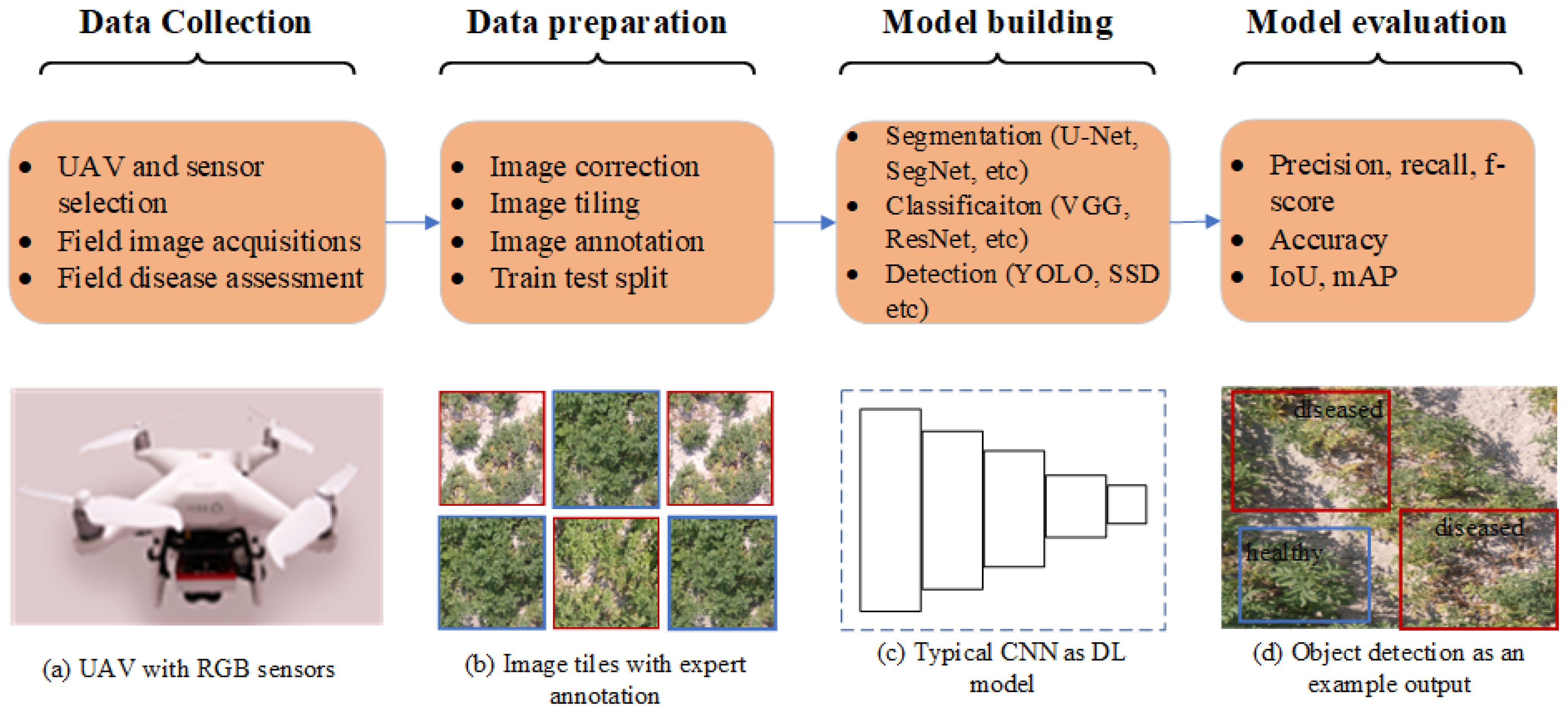
- We provide a taxonomy for crop disease estimation and explain the general steps involved in the working pipelines with UAV-based remote sensing.
- (iii)
- We analyze and summarize the performance of various conventional ML and DL methods for crop disease detection using UAV imagery.
- (iv)
- We report a meta-analysis of the existing literature to gain the current research trends and directions.
- (v)
- We underscore the challenges, opportunities and research avenues of UVA-based remote sensing for crop disease detection.
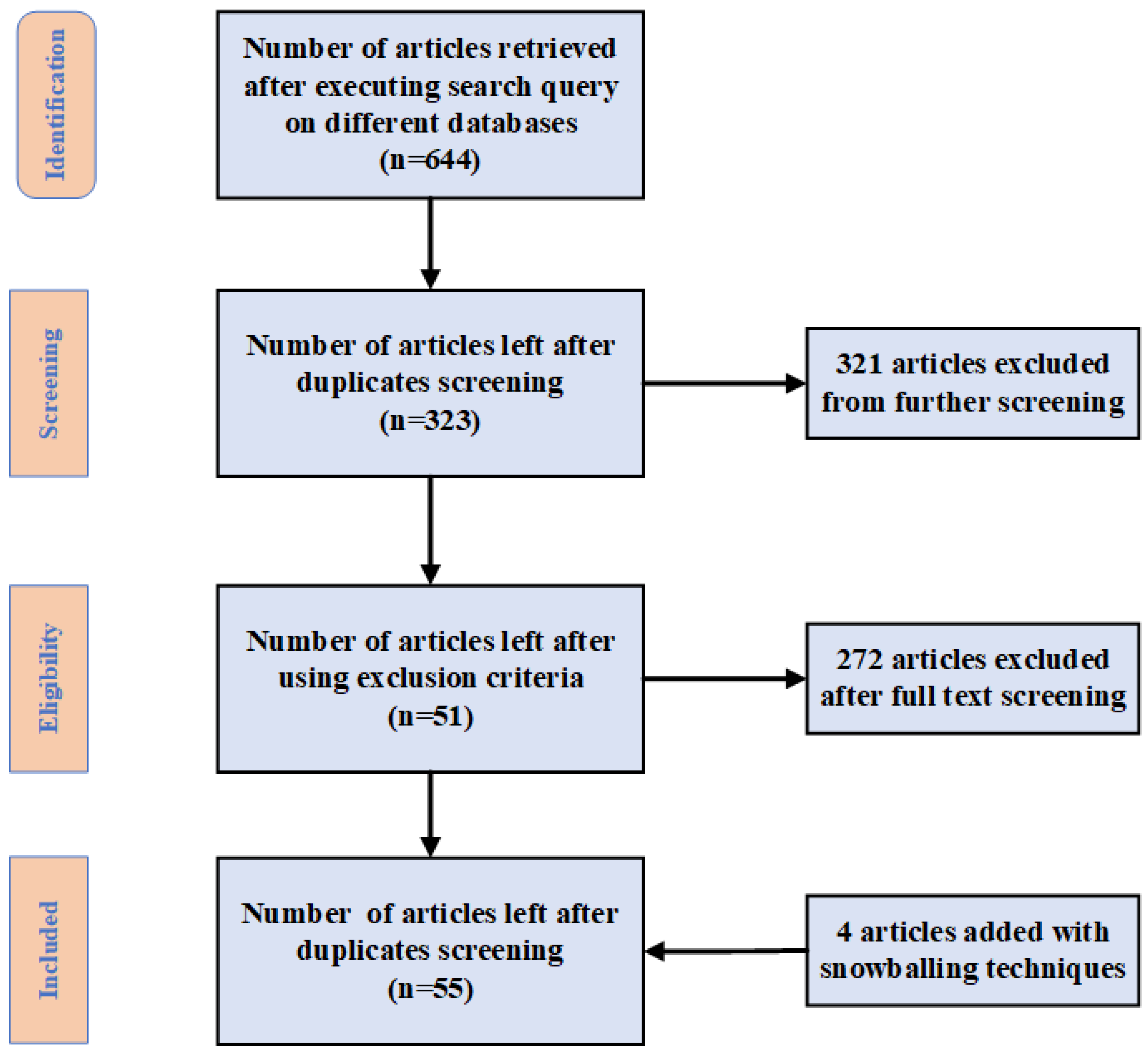
2. The Approach for the Survey
- (i)
- Articles that are written in a language other than the English language;
- (ii)
- Publications that are about agriculture but do not address crop disease estimation;
- (iii)
- Publications that are related to crop disease but do not use UAV-based remote sensing.
3. Background
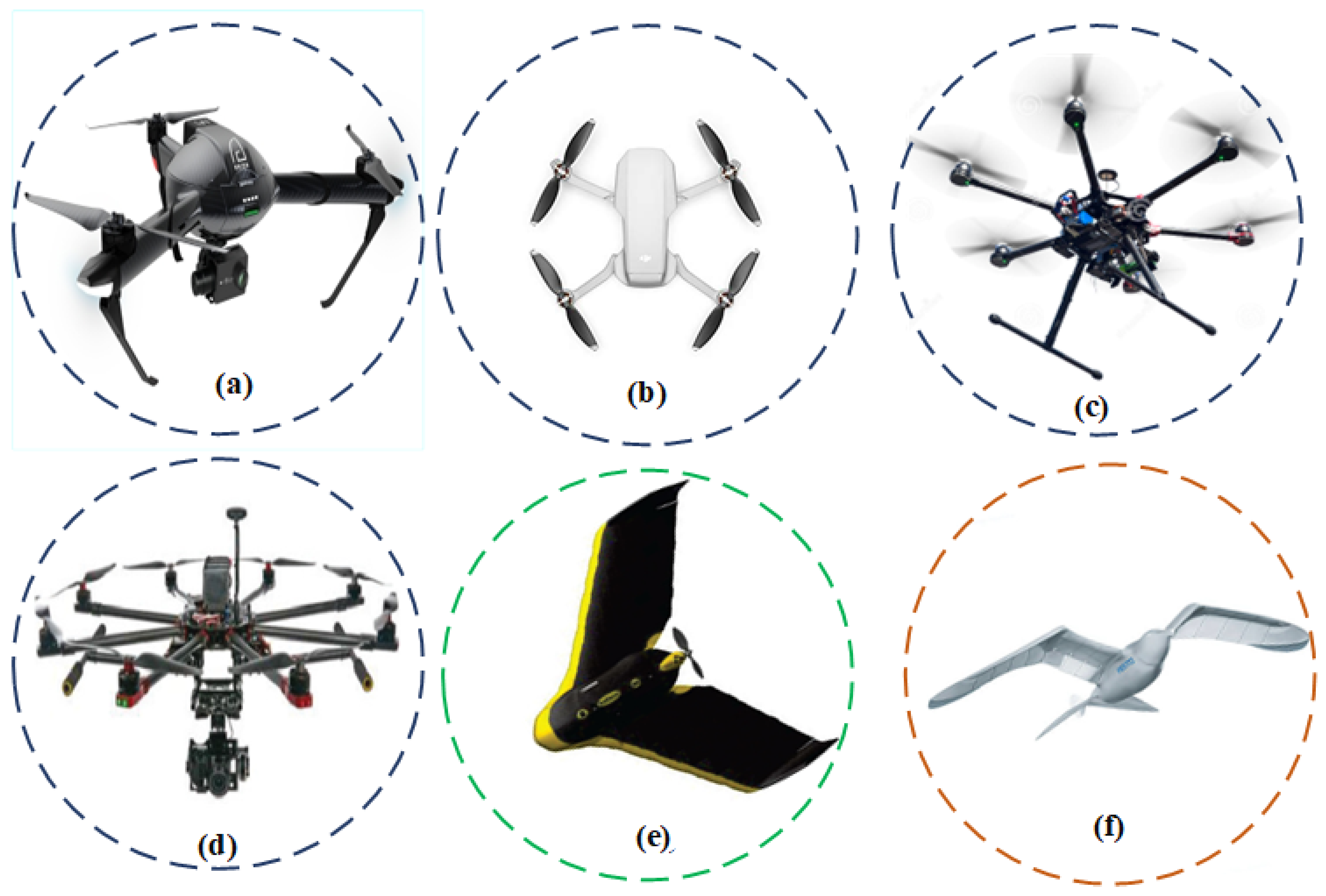
3.1. Remote Sensing and UAVs
3.2. Machine Learning
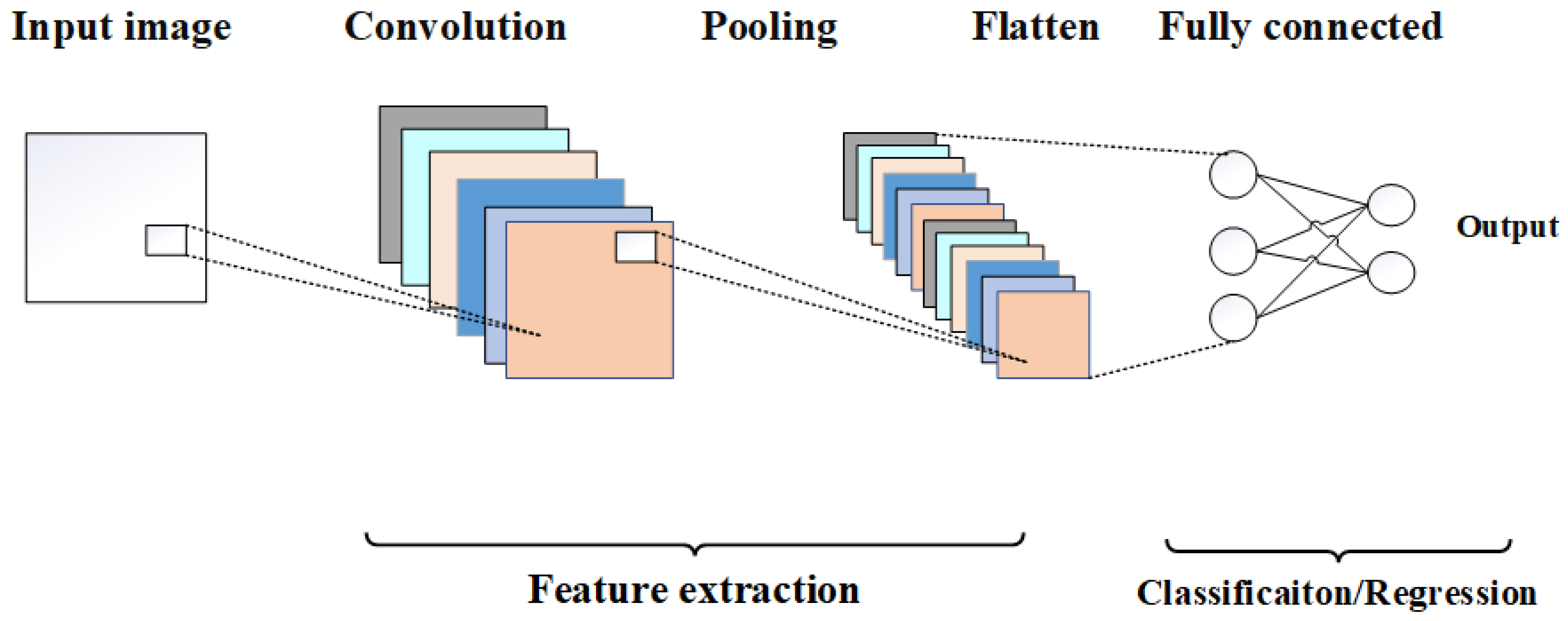
3.3. Deep Learning
3.4. Evaluation Matrices
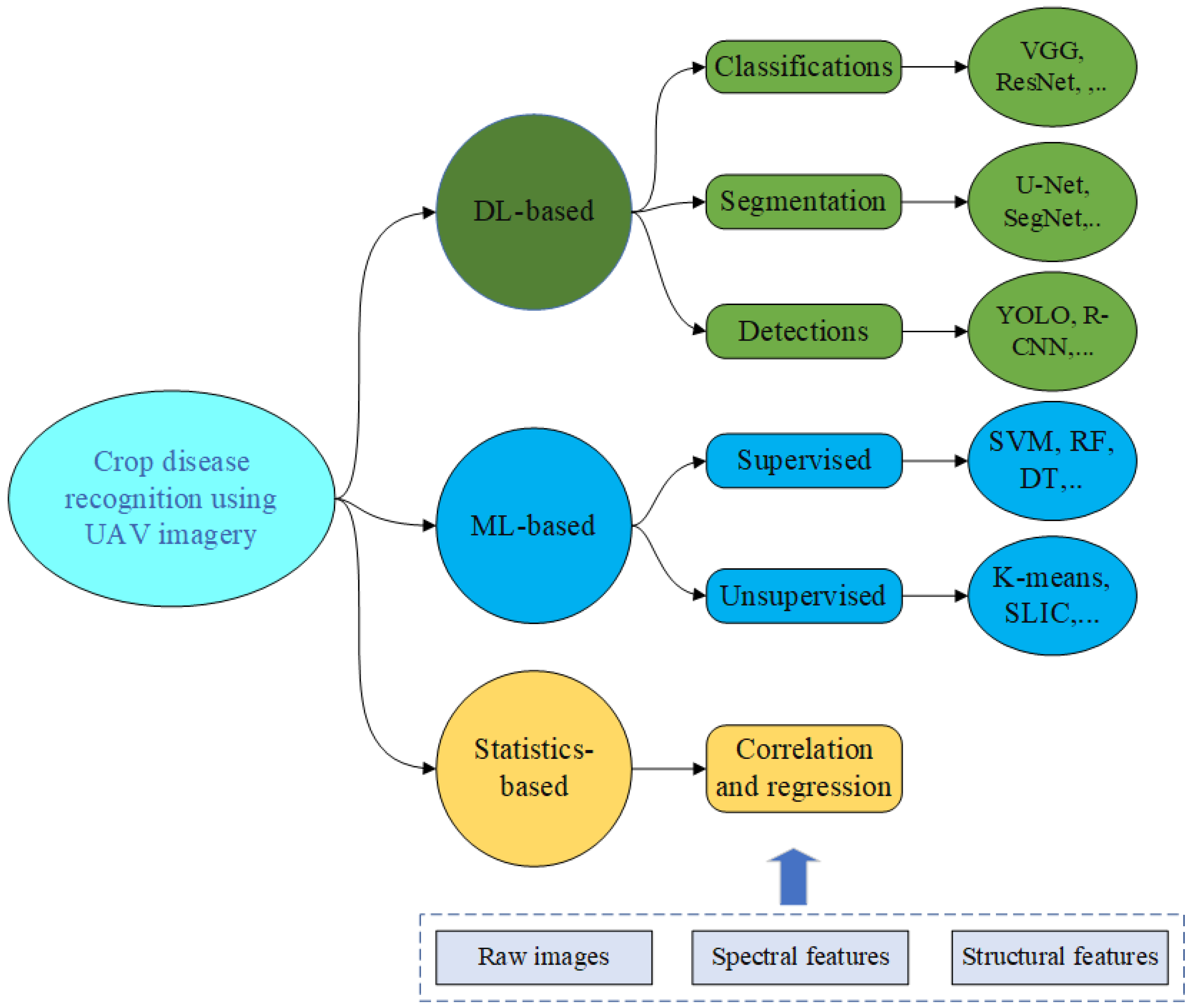
4. Taxonomy of Crop Disease Assessment Using UAV Imagery
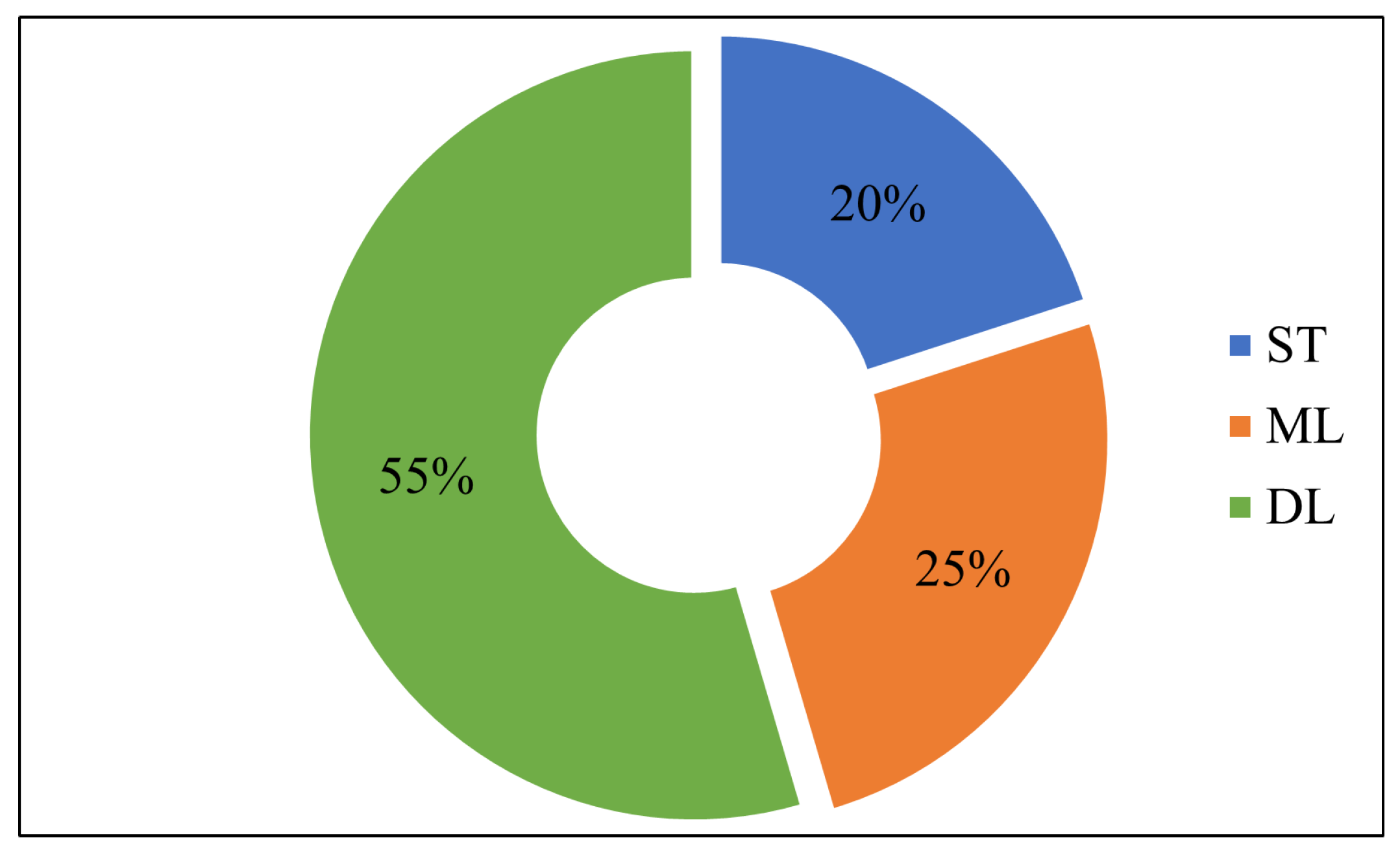
4.1. Statistics-Based Methods

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Crop | Disease | Sensors | VIs | Eval. Metrics | Remarks |
|---|---|---|---|---|---|---|
| [80] | Olive | VW | Thermal and HS | PRI, CWSI | = 0.83 | The early detection of disease was achieved using CWSI index with strong correlation |
| [82] | Potato | LB | MS | NDVI | - | NDVI map was used to visually map the regions affected by the disease |
| [83] | Grape | Leaf stripe | MS | NDVI | - | Statistical analysis was performed to distinguish the healthy vine vs. diseased vine |
| [17] | Peanuts | WD | MS | NDRE, NRRE, GDVI, GNDVI, etc. | = 0.82 | The NDRE was best suited for wilt disease estimation, with high correlation between manual disease score and UAV images taken at 120 days from seed |
| [51] | Wheat | FD | RGB | NDI, GI and GLI | = 0.79 | They calculated three VIs and found their correlation with a coefficient of infection (CI) by foliar disease on wheat and achieved the highest with the GLI index |
| [50] | Citrus | GD | MS | NDVI, MSAVI, NDRE and CI | = 0.90 | Using two-sample t-test, it was shown that the four VIs have the ability to differentiate the healthy and diseased citrus group at a 5% significance level |
| [78] | Potato | LB | RGB | HSV | = 0.73 | They utilized the HSV color space to distinguish the diseased and healthy crops |
| [79] | Banana | FW | MS | CI, NDVI, NDRE | OA = 0.91 | The VIs were used in conjunction with binary logistic regression to classify the pixels into either diseased or healthy classes |
| [45] | Sugarcane | WLD | MS | NDRE, NDVI, GNDVI, RVI, OSAVI, etc. | - | Twelve vegetation indices were calculated and used to distinguish the healthy vs. diseased leaf area. The NDRE and GNDVI were able to make a difference of 49.88% and 49.37% between the two groups. |
| [84] | Wheat | LR and SR | RGB | SRI, LRI | = 0.81 | The correlation coefficients (r) of 0.92 ( = 0.81) and 0.96 were achieved for white leaf rust and white stripe rust severity between UAV-estimated values and observed values |
| [16] | Wheat | YR | HS | SIPI, PRI, TCARI, PSRI, YRI GI, etc. | = 0.88 | VIs and texture features were analyzed for yellow rust detection with PLSR. The combination of VIs and TFs provided the highest accuracy ( = 0.88) at the late infection stages. |
4.2. Conventional Machine Learning (ML)-Based Method
| Ref. | Crop | Disease | Sensors | Features | ML Methods | Eval. Metrics |
|---|---|---|---|---|---|---|
| [86] | Cotton | Leaf blight | MS | GRE, RED and NIR | MLR, SVM and RF | A = 79.00 |
| [57] | Banana | FW | MS | WDRVI, NDVI, TDVI | SVM, RF, BPNN, LR, HA, ISODATA | A = 97.28 |
| [58] | Banana | FW | MS | SBs | SVM, RF and ANN | A = 91.40 |
| [59] | Wheat | FW | HS | SBs, VI and TF | BP with SA | A = 98.00 |
| [88] | Potato | FW | MS | mean VI and Heights | GBM | A = 84.00 |
| [85] | Wheat | FHB | HS | SBs, VIs, and WFs | SVM | = 0.88 |
| [87] | Potato | LB | MS | SBs and VI | RF, GBM, SVC and KNN | A = 87.8 |
| [89] | Wheat | WS | MS | VI and TF | PLSR, SVR, and BPNN | = 83.00 |
| [90] | Wheat | YR | HS | VIs | SVM | = 63.00 |
| [91] | Sugarcane | WLD | MS | VIs | XGB, RF, DT and KNN | A = 92.00 |
| [92] | Citrus | CGD | MS | VIs | SVM | A = 81.75 |
| [62] | Cotton | CRR | MS | GRE, RED and NIR | K-means, SVM | A = 88.50 |
| [93] | Pam oil | BSR | MS | GRE, RED and NIR | ANN | A = 72.73 |
| [56] | Corn | AW | MS | NDVI, RENDVI, DSM, red, green, RE and NIR | RF, MLP, NB, SVM | A = 98.50 |
4.3. Deep Learning (DL)-Based Methods
4.3.1. Pixel-Based Segmentation Models
| Ref. | Crop | Disease | Sensors | Height | DL Methods | B | Recall | F-Score | Acc. |
|---|---|---|---|---|---|---|---|---|---|
| [105] | Maize | NLB | RGB | 6 m | Mask R-CNN | 96.00 | - | - | - |
| [95] | Grape | VD | RGB & NIR | - | SegNet | 84.04 | 90.47 | 87.12 | - |
| [106] | Sugar | CLS | RGB | - | FCN | 74.81 | 80.25 | 75.55 | - |
| [99] | Wheat | YR | RGB | PSPNet | - | - | - | 94.00 | |
| [94] | Wheat | YR | MS | 20 m | U-Net | 91.30 | 92.60 | 92.00 | - |
| [101] | Coffee | NM | RGB | 10 m | U-Net & PSPNet | - | - | 69.00 | - |
| [100] | wheat | SR | RGB | 50 m | DeepLabv3+ | - | - | 81.00 | - |
| [102] | wheat | YR | RGB | - | lr-UNet | - | - | - | 97.13 |
| [107] | Potato | LB | HS | 30 m | CropdocNet | - | - | - | 95.75 |
| [105] | Maize | NLB | RGB | 6 m | Mask R-CNN | 96.00 | - | - | - |
| [106] | Sugar | CLS | RGB | - | CNN | 74.81 | 80.25 | 75.55 | - |
| [108] | Vine | VD | RGB-NIR-D | 25 m | VddNet | - | - | - | 93.72 |
| [104] | Wheat | YR | MS | 20 m | UNet, DF-UNet | - | - | - | 96.93 |
4.3.2. Object-Level Classification Models
| Ref. | Crop | Disease | Sensors | Height | DL Methods | Acc. (%) |
|---|---|---|---|---|---|---|
| [118] | Potato | virus | RGB | 10 m | CNN | 84.00 |
| [98] | Maize | NLB | RGB | 6 m | ResNet-34 | 95.10 |
| [72] | Wheat | YR | HS | 30 m | Inception-ResNet | 85.00 |
| [110] | Soybean | SD | RGB | 2 m | Inception-v3, ResNet50, VGG-19, Xception | 99.04 |
| [74] | Radish | FW | RGB | - | VGG | 93.30 |
| [111] | Corn | CD | RGB | 12 m | VGG, ResNet, Inception, DenseNet169 | 100.00 |
| [113] | Radish | FW | RGB | 10 m | GoogleNet | 90.00 |
| [119] | Banana | BD | RGB | 50 m | VGG and CNN | 92.00 |
| [112] | Maize | FAW | RGB | 5 m | VGG16, VGG19, Inception-v3 and MobileNet | 100.00 |
| [115] | Grape | VD | RGB | 25 m | CNN | 95.80 |
| [117] | Wheat | HLB | RGB | 80 m | CNN | 91.43 |
4.3.3. Object Detection-Based Models
| Ref. | Crop | Disease | Sensors | Height | Methods | Metrics (%) |
|---|---|---|---|---|---|---|
| [96] | Cotton | CRR | MS | 120 m | YOLOV5 | A = 70.00 |
| [123] | Brassica chinensis | WW | RGB | 2 m | CenterNet | A = 87.20 |
| [97] | Sugar | WLD | RGB | 20 m | YOLOV5, Faster R-CNN, DETR | P = 95.00 |
| [122] | Potato | DS | RGB | - | RetinaNet-Ag | P = 74.00 |
| [124] | Tea | TLB | RGB | 5 m | DDMA-YOLO | P = 73.8 |
5. Results and Discussion
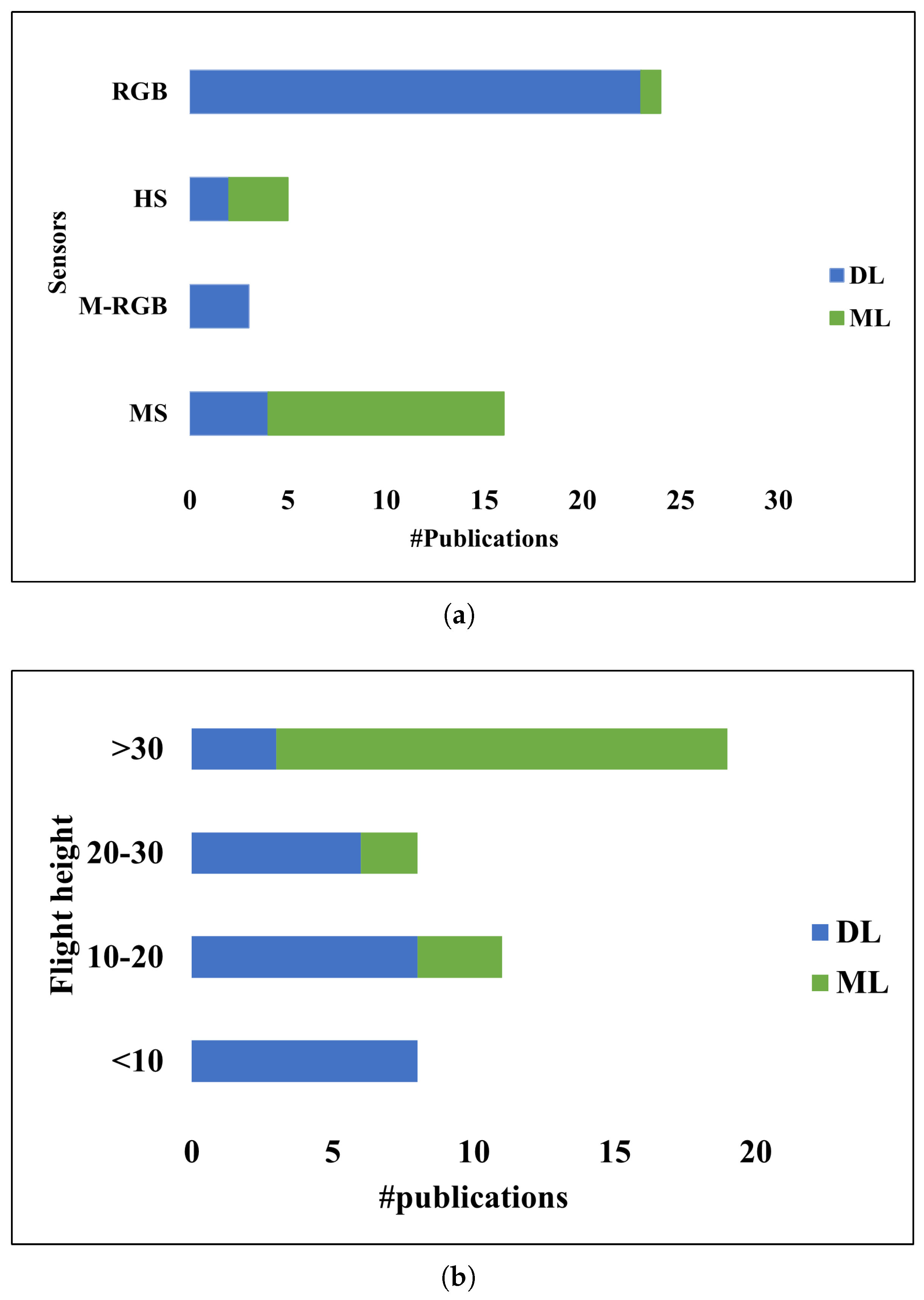
5.1. UAV Sensing Systems
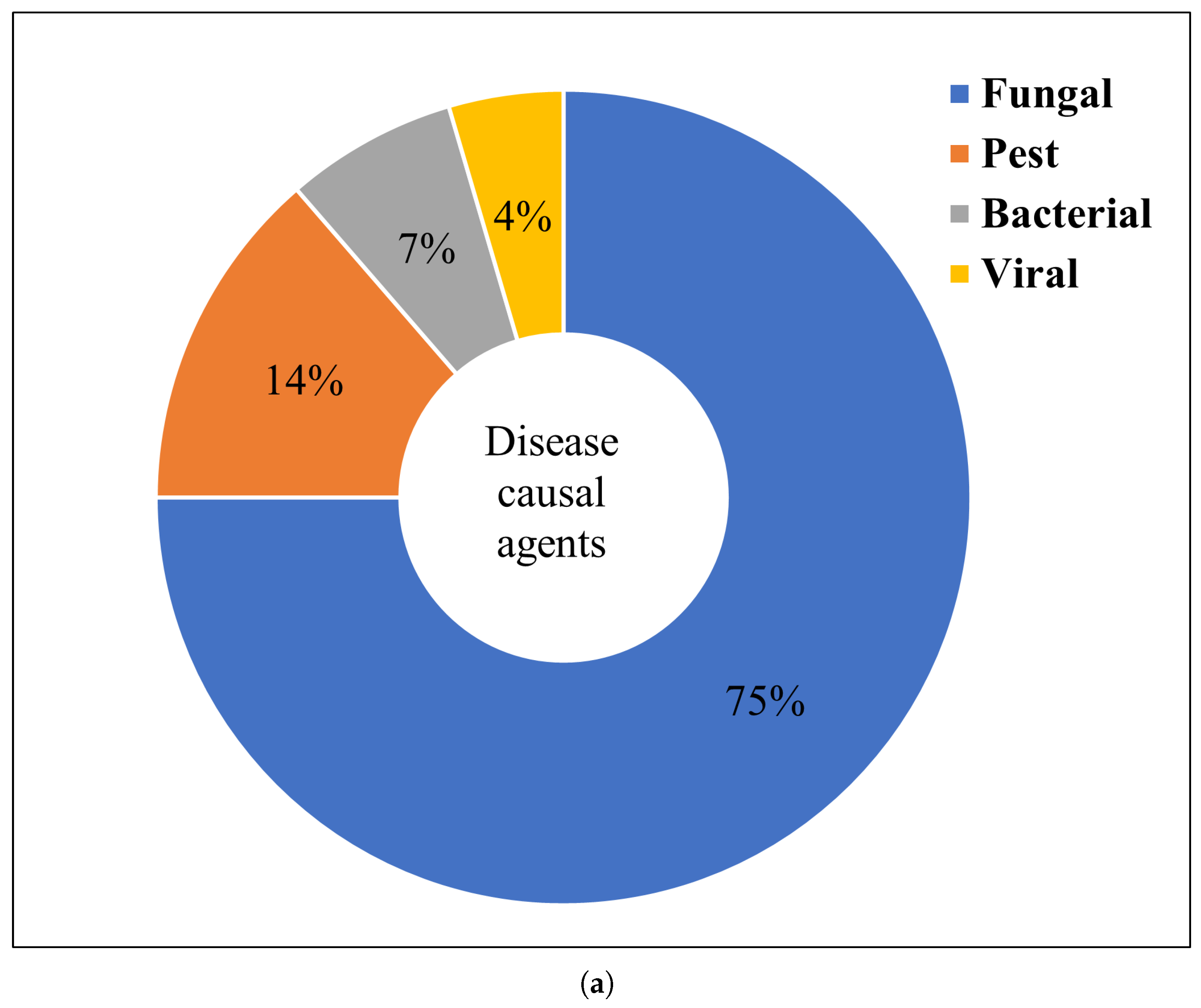
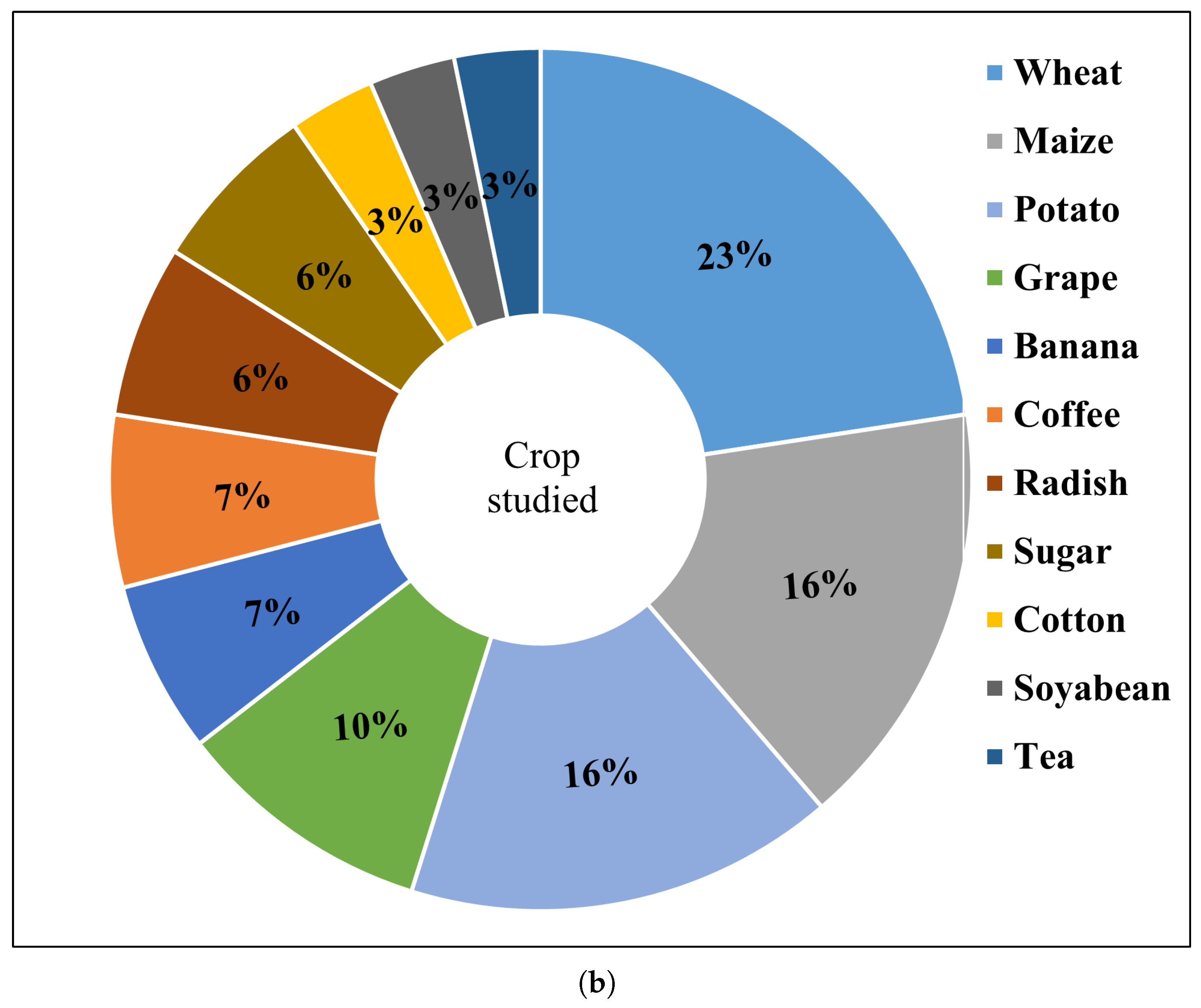
5.2. Type of Crops and Crop Diseases
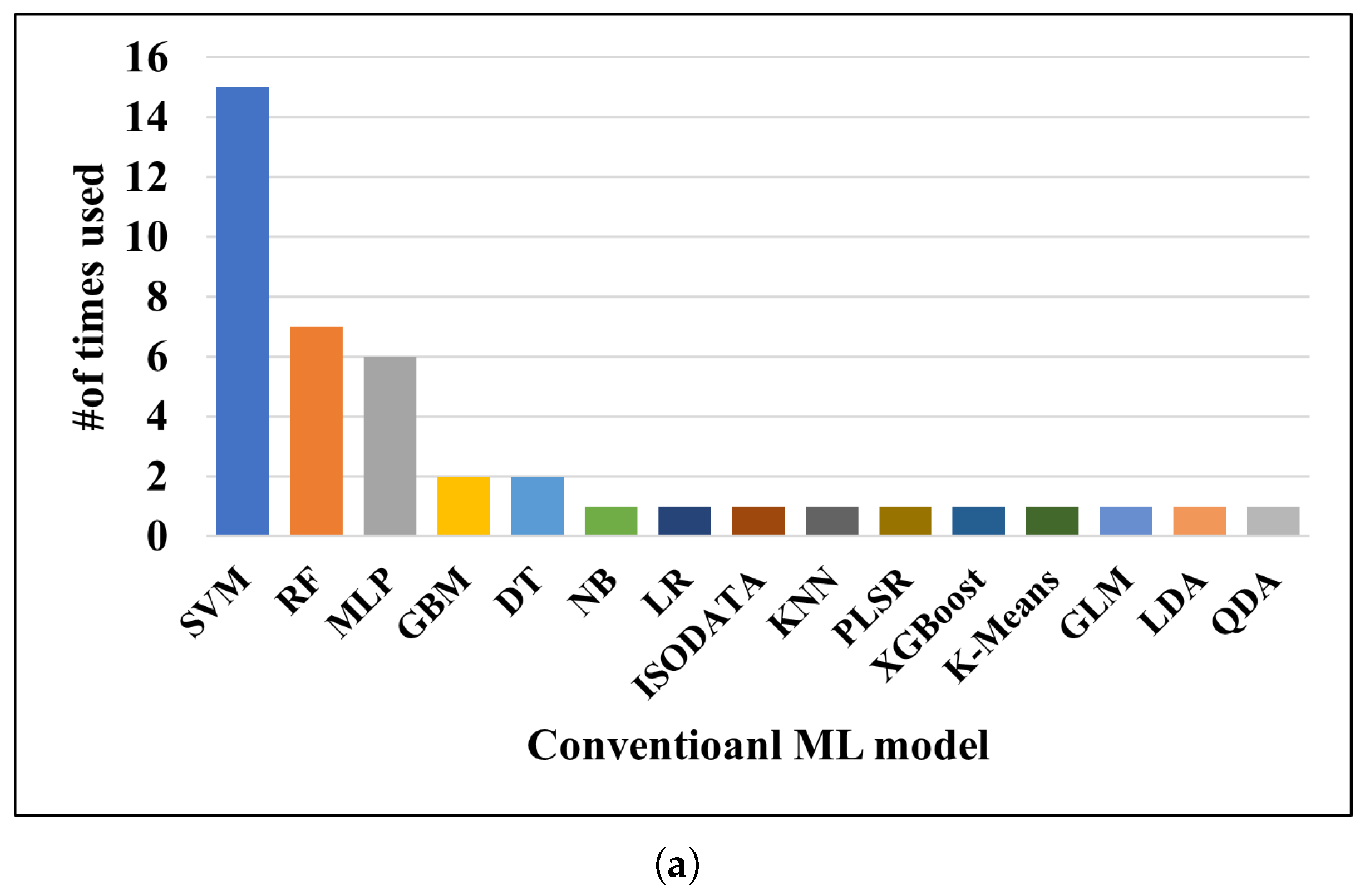
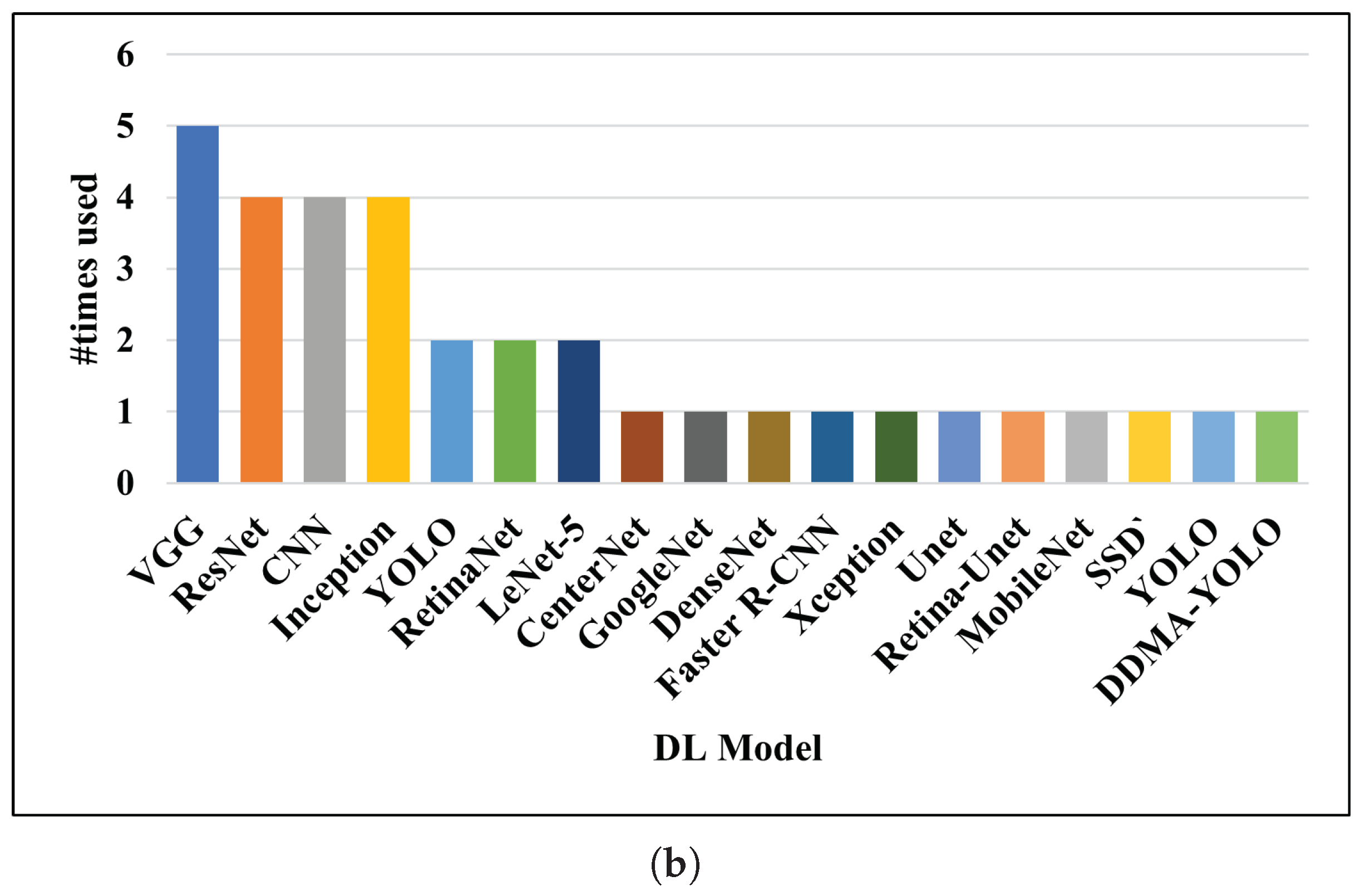
5.3. Conventional ML and DL Methods
5.4. Summary of Findings
- (i)
- The UAV sensing systems’ parameters, such as flight altitude, payloads and sensors (for image acquisition), affect the performance of crop disease estimations. For instance, small UAVs have a limited payload, which prevents their use for large-scale crop disease estimations. Hence, further research and development are expected towards low-cost sensing technology with higher payloads. In addition, image resolution is critical while using DL models, where high-spatial-resolution images can be obtained by flying the UAV at a low altitude or using other up-sampling techniques.
- (ii)
- The promising results on crop disease estimation using DL models show the possibility for the further expansion of DL models to various crop disease detection tasks. However, the main challenge associated with such models is the scarcity of labeled data. It is quite expensive to label the UAV-acquired images with corresponding disease labels, as it requires the involvement of crop disease experts. However, unsupervised or semi-supervised techniques might be developed in the near future.
- (iii)
- When choosing to use conventional ML as well as DL models for crop disease detection, it is hard to make a decision among the existing DL architectures, as they have produced different levels of accuracy in different works. It would be interesting to develop a benchmark dataset for various crop diseases so that various DL models can be benchmarked and compared for better performance considerations.
- (iv)
- Since DL-based methods require high computational resources, it is essential to work towards light-weight DL models which can be easily simulated on edge computing platforms such as the IoT.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | Artificial neural network |
| BPNN | Back propagation neural network |
| CNN | Convolutional neural network |
| DL | Deep learning |
| DT | Decision tree |
| DSM | Digital surface model |
| DL | Deep learning |
| DCNN | Deep convolution neural network |
| FCN | Fully connected neural network |
| GPS | Geographical positioning system |
| GBM | Gradient boosting machine |
| GLM | Generalized linear models |
| ISODATA | Iterative self organizing data analysis technique |
| IoT | Internet of things |
| IoU | Intersection of union |
| KNN | K-nearest neighbor |
| LR | Linear regression |
| LDA | Linear discriminant analysis |
| mAP | Mean average precision |
| MLP | Multi-layer perceptron |
| ML | Machine learning |
| MLR | Multiple linear regression |
| NB | Naive Bayes |
| PLSR | Partial least square regression |
| PA | Precision agriculture |
| QDA | Quadratic discriminant analysis |
| RF | Random forest |
| ROI | Region of interest |
| SVM | Support vector machine |
| UAV | Unmanned aerial vehicle |
| VI | Vegetation index |
| VGG | Visual geometry group |
| XGBoost | eXtreme gradient boosting |
References
- Suzuki, N.; Rivero, R.M.; Shulaev, V.; Blumwald, E.; Mittler, R. Abiotic and biotic stress combinations. New Phytol. 2014, 203, 32–43. [Google Scholar] [CrossRef] [PubMed]
- Khakimov, A.; Salakhutdinov, I.; Omolikov, A.; Utaganov, S. Traditional and current-prospective methods of agricultural plant diseases detection: A review. In Proceedings of the IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2022; Volume 951, p. 012002. [Google Scholar]
- Kalischuk, M.; Paret, M.L.; Freeman, J.H.; Raj, D.; Da Silva, S.; Eubanks, S.; Wiggins, D.; Lollar, M.; Marois, J.J.; Mellinger, H.C.; et al. An improved crop scouting technique incorporating unmanned aerial vehicle–assisted multispectral crop imaging into conventional scouting practice for gummy stem blight in watermelon. Plant Dis. 2019, 103, 1642–1650. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.M.; Ostendorf, B.; Gautam, D.; Habili, N.; Pagay, V. Plant Viral Disease Detection: From Molecular Diagnosis to Optical Sensing Technology—A Multidisciplinary Review. Remote Sens. 2022, 14, 1542. [Google Scholar] [CrossRef]
- Singh, V.; Sharma, N.; Singh, S. A review of imaging techniques for plant disease detection. Artif. Intell. Agric. 2020, 4, 229–242. [Google Scholar] [CrossRef]
- Usha, K.; Singh, B. Potential applications of remote sensing in horticulture—A review. Sci. Hortic. 2013, 153, 71–83. [Google Scholar] [CrossRef]
- de Castro, A.I.; Ehsani, R.; Ploetz, R.C.; Crane, J.H.; Buchanon, S. Detection of laurel wilt disease in avocado using low altitude aerial imaging. PLoS ONE 2015, 10, e0124642. [Google Scholar] [CrossRef] [PubMed]
- Sarkar, S.; Ramsey, A.F.; Cazenave, A.B.; Balota, M. Peanut leaf wilting estimation from RGB color indices and logistic models. Front. Plant Sci. 2021, 12, 713. [Google Scholar] [CrossRef] [PubMed]
- Su, J.; Zhu, X.; Li, S.; Chen, W.H. AI meets UAVs: A survey on AI empowered UAV perception systems for precision agriculture. Neurocomputing 2023, 518, 242–270. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Terentev, A.; Dolzhenko, V.; Fedotov, A.; Eremenko, D. Current state of hyperspectral remote sensing for early plant disease detection: A review. Sensors 2022, 22, 757. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- García-Martínez, H.; Flores-Magdaleno, H.; Ascencio-Hernández, R.; Khalil-Gardezi, A.; Tijerina-Chávez, L.; Mancilla-Villa, O.R.; Vázquez-Peña, M.A. Corn grain yield estimation from vegetation indices, canopy cover, plant density, and a neural network using multispectral and RGB images acquired with unmanned aerial vehicles. Agriculture 2020, 10, 277. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, L.; Lin, L. Plot-scale rice grain yield estimation using UAV-based remotely sensed images via CNN with time-invariant deep features decomposition. In Proceedings of the IGARSS 2019–2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 7180–7183. [Google Scholar]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Guo, A.; Huang, W.; Dong, Y.; Ye, H.; Ma, H.; Liu, B.; Wu, W.; Ren, Y.; Ruan, C.; Geng, Y. Wheat yellow rust detection using UAV-based hyperspectral technology. Remote Sens. 2021, 13, 123. [Google Scholar] [CrossRef]
- Patrick, A.; Pelham, S.; Culbreath, A.; Holbrook, C.C.; De Godoy, I.J.; Li, C. High throughput phenotyping of tomato spot wilt disease in peanuts using unmanned aerial systems and multispectral imaging. IEEE Instrum. Meas. Mag. 2017, 20, 4–12. [Google Scholar] [CrossRef]
- Xu, R.; Li, C.; Paterson, A.H. Multispectral imaging and unmanned aerial systems for cotton plant phenotyping. PLoS ONE 2019, 14, e0205083. [Google Scholar] [CrossRef]
- Bhandari, M.; Shahi, T.B.; Neupane, A.; Walsh, K.B. BotanicX-AI: Identification of Tomato Leaf Diseases Using an Explanation-Driven Deep-Learning Model. J. Imaging 2023, 9, 53. [Google Scholar] [CrossRef]
- Abdulridha, J.; Ampatzidis, Y.; Qureshi, J.; Roberts, P. Laboratory and UAV-based identification and classification of tomato yellow leaf curl, bacterial spot, and target spot diseases in tomato utilizing hyperspectral imaging and machine learning. Remote Sens. 2020, 12, 2732. [Google Scholar] [CrossRef]
- Su, J.; Liu, C.; Coombes, M.; Hu, X.; Wang, C.; Xu, X.; Li, Q.; Guo, L.; Chen, W.H. Wheat yellow rust monitoring by learning from multispectral UAV aerial imagery. Comput. Electron. Agric. 2018, 155, 157–166. [Google Scholar] [CrossRef]
- Barbedo, J.G.A. A review on the use of unmanned aerial vehicles and imaging sensors for monitoring and assessing plant stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef]
- Neupane, K.; Baysal-Gurel, F. Automatic identification and monitoring of plant diseases using unmanned aerial vehicles: A review. Remote Sens. 2021, 13, 3841. [Google Scholar] [CrossRef]
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; Taberkit, A.M. Recent Advances on UAV and Deep Learning for Early Crop Diseases Identification: A Short Review. In Proceedings of the 2021 International Conference on Information Technology (ICIT), Amman, Jordan, 14–15 July 2021; pp. 334–339. [Google Scholar]
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; Taberkit, A.M. Deep learning techniques to classify agricultural crops through UAV imagery: A review. Neural Comput. Appl. 2022, 34, 9511–9536. [Google Scholar] [CrossRef] [PubMed]
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; Taberkit, A.M. A survey on deep learning-based identification of plant and crop diseases from UAV-based aerial images. Cluster Comput. 2022, 26, 1297–1317. [Google Scholar] [CrossRef] [PubMed]
- Kuswidiyanto, L.W.; Noh, H.H.; Han, X. Plant Disease Diagnosis Using Deep Learning Based on Aerial Hyperspectral Images: A Review. Remote Sens. 2022, 14, 6031. [Google Scholar] [CrossRef]
- Messina, G.; Modica, G. Applications of UAV thermal imagery in precision agriculture: State of the art and future research outlook. Remote Sens. 2020, 12, 1491. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. Int. J. Surg. 2021, 88, 105906. [Google Scholar] [CrossRef]
- Muruganantham, P.; Wibowo, S.; Grandhi, S.; Samrat, N.H.; Islam, N. A systematic literature review on crop yield prediction with deep learning and remote sensing. Remote Sens. 2022, 14, 1990. [Google Scholar] [CrossRef]
- Awange, J.L.; Kiema, J.B.K. Fundamentals of remote sensing. In Environmental Geoinformatics; Springer: Berlin/Heidelberg, Germany, 2013; pp. 111–118. [Google Scholar]
- Chen, C.J.; Huang, Y.Y.; Li, Y.S.; Chen, Y.C.; Chang, C.Y.; Huang, Y.M. Identification of fruit tree pests with deep learning on embedded drone to achieve accurate pesticide spraying. IEEE Access 2021, 9, 21986–21997. [Google Scholar] [CrossRef]
- Geipel, J.; Link, J.; Claupein, W. Combined spectral and spatial modeling of corn yield based on aerial images and crop surface models acquired with an unmanned aircraft system. Remote Sens. 2014, 6, 10335–10355. [Google Scholar] [CrossRef]
- Albornoz, C.; Giraldo, L.F. Trajectory design for efficient crop irrigation with a UAV. In Proceedings of the 2017 IEEE 3rd Colombian Conference on Automatic Control (CCAC), Indias, Colombia, 18–20 October 2017; pp. 1–6. [Google Scholar]
- Gonzalez-Dugo, V.; Zarco-Tejada, P.; Nicolás, E.; Nortes, P.A.; Alarcón, J.; Intrigliolo, D.S.; Fereres, E. Using high resolution UAV thermal imagery to assess the variability in the water status of five fruit tree species within a commercial orchard. Precis. Agric. 2013, 14, 660–678. [Google Scholar] [CrossRef]
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Huang, Y.; Reddy, K.N.; Fletcher, R.S.; Pennington, D. UAV low-altitude remote sensing for precision weed management. Weed Technol. 2018, 32, 2–6. [Google Scholar] [CrossRef]
- Panday, U.S.; Shrestha, N.; Maharjan, S.; Pratihast, A.K.; Shahnawaz; Shrestha, K.L.; Aryal, J. Correlating the plant height of wheat with above-ground biomass and crop yield using drone imagery and crop surface model, a case study from Nepal. Drones 2020, 4, 28. [Google Scholar] [CrossRef]
- Ballester, C.; Brinkhoff, J.; Quayle, W.C.; Hornbuckle, J. Monitoring the effects of water stress in cotton using the green red vegetation index and red edge ratio. Remote Sens. 2019, 11, 873. [Google Scholar] [CrossRef]
- Shahi, T.B.; Xu, C.Y.; Neupane, A.; Guo, W. Machine learning methods for precision agriculture with UAV imagery: A review. Electron. Res. Arch. 2022, 30, 4277–4317. [Google Scholar] [CrossRef]
- Cai, G.; Dias, J.; Seneviratne, L. A survey of small-scale unmanned aerial vehicles: Recent advances and future development trends. Unmanned Syst. 2014, 2, 175–199. [Google Scholar] [CrossRef]
- Mogili, U.R.; Deepak, B. Review on application of drone systems in precision agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Huang, S.; Tang, L.; Hupy, J.P.; Wang, Y.; Shao, G. A commentary review on the use of normalized difference vegetation index (NDVI) in the era of popular remote sensing. J. For. Res. 2021, 32, 1–6. [Google Scholar] [CrossRef]
- Sanseechan, P.; Saengprachathanarug, K.; Posom, J.; Wongpichet, S.; Chea, C.; Wongphati, M. Use of vegetation indices in monitoring sugarcane white leaf disease symptoms in sugarcane field using multispectral UAV aerial imagery. In Proceedings of the IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2019; Volume 301, p. 012025. [Google Scholar]
- Kauth, R.J.; Thomas, G. The tasselled cap–a graphic description of the spectral-temporal development of agricultural crops as seen by Landsat. In Proceedings of the LARS Symposia, West Lafayette, IN, USA, 29 June–1 July 1976; p. 159. [Google Scholar]
- Cao, X.; Luo, Y.; Zhou, Y.; Fan, J.; Xu, X.; West, J.S.; Duan, X.; Cheng, D. Detection of powdery mildew in two winter wheat plant densities and prediction of grain yield using canopy hyperspectral reflectance. PLoS ONE 2015, 10, e0121462. [Google Scholar] [CrossRef]
- Lu, N.; Zhou, J.; Han, Z.; Li, D.; Cao, Q.; Yao, X.; Tian, Y.; Zhu, Y.; Cao, W.; Cheng, T. Improved estimation of aboveground biomass in wheat from RGB imagery and point cloud data acquired with a low-cost unmanned aerial vehicle system. Plant Methods 2019, 15, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Phadikar, S.; Goswami, J. Vegetation indices based segmentation for automatic classification of brown spot and blast diseases of rice. In Proceedings of the 2016 3rd International Conference on Recent Advances in Information Technology (RAIT), Dhanbad, India, 3–5 March 2016; pp. 284–289. [Google Scholar]
- Chang, A.; Yeom, J.; Jung, J.; Landivar, J. Comparison of canopy shape and vegetation indices of citrus trees derived from UAV multispectral images for characterization of citrus greening disease. Remote Sens. 2020, 12, 4122. [Google Scholar] [CrossRef]
- Bhandari, M.; Ibrahim, A.M.; Xue, Q.; Jung, J.; Chang, A.; Rudd, J.C.; Maeda, M.; Rajan, N.; Neely, H.; Landivar, J. Assessing winter wheat foliage disease severity using aerial imagery acquired from small Unmanned Aerial Vehicle (UAV). Comput. Electron. Agric. 2020, 176, 105665. [Google Scholar] [CrossRef]
- Shahi, T.B.; Shrestha, A.; Neupane, A.; Guo, W. Stock price forecasting with deep learning: A comparative study. Mathematics 2020, 8, 1441. [Google Scholar] [CrossRef]
- Shahi, T.B.; Sitaula, C. Natural language processing for Nepali text: A review. Artif. Intell. Rev. 2022, 55, 3401–3429. [Google Scholar] [CrossRef]
- Bhandari, M.; Shahi, T.B.; Siku, B.; Neupane, A. Explanatory classification of CXR images into COVID-19, Pneumonia and Tuberculosis using deep learning and XAI. Comput. Biol. Med. 2022, 150, 106156. [Google Scholar] [CrossRef]
- Shahi, T.B.; Sitaula, C.; Neupane, A.; Guo, W. Fruit classification using attention-based MobileNetV2 for industrial applications. PLoS ONE 2022, 17, e0264586. [Google Scholar] [CrossRef]
- Tao, W.; Wang, X.; Xue, J.H.; Su, W.; Zhang, M.; Yin, D.; Zhu, D.; Xie, Z.; Zhang, Y. Monitoring the damage of armyworm as a pest in summer corn by unmanned aerial vehicle imaging. Pest Manag. Sci. 2022, 78, 2265–2276. [Google Scholar] [CrossRef]
- Zhang, S.; Li, X.; Ba, Y.; Lyu, X.; Zhang, M.; Li, M. Banana Fusarium Wilt Disease Detection by Supervised and Unsupervised Methods from UAV-Based Multispectral Imagery. Remote Sens. 2022, 14, 1231. [Google Scholar] [CrossRef]
- Ye, H.; Huang, W.; Huang, S.; Cui, B.; Dong, Y.; Guo, A.; Ren, Y.; Jin, Y. Identification of banana fusarium wilt using supervised classification algorithms with UAV-based multi-spectral imagery. Int. J. Agric. Biol. Eng. 2020, 13, 136–142. [Google Scholar] [CrossRef]
- Liu, L.; Dong, Y.; Huang, W.; Du, X.; Ma, H. Monitoring wheat fusarium head blight using unmanned aerial vehicle hyperspectral imagery. Remote Sens. 2020, 12, 3811. [Google Scholar] [CrossRef]
- Shahi, T.B.; Xu, C.Y.; Neupane, A.; Fleischfresser, D.B.; O’Connor, D.J.; Wright, G.C.; Guo, W. Peanut yield prediction with UAV multispectral imagery using a cooperative machine learning approach. Electron. Res. Arch. 2023, 31, 3343–3361. [Google Scholar] [CrossRef]
- Schmarje, L.; Santarossa, M.; Schröder, S.M.; Koch, R. A survey on semi-, self-and unsupervised learning for image classification. IEEE Access 2021, 9, 82146–82168. [Google Scholar] [CrossRef]
- Wang, T.; Thomasson, J.A.; Yang, C.; Isakeit, T.; Nichols, R.L. Automatic classification of cotton root rot disease based on UAV remote sensing. Remote Sens. 2020, 12, 1310. [Google Scholar] [CrossRef]
- Mishra, B.; Dahal, A.; Luintel, N.; Shahi, T.B.; Panthi, S.; Pariyar, S.; Ghimire, B.R. Methods in the spatial deep learning: Current status and future direction. Spat. Inf. Res. 2022, 30, 18. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Sitaula, C.; Shahi, T.B.; Aryal, S.; Marzbanrad, F. Fusion of multi-scale bag of deep visual words features of chest X-ray images to detect COVID-19 infection. Sci. Rep. 2021, 11, 1–12. [Google Scholar] [CrossRef]
- Mishra, B.; Shahi, T.B. Deep learning-based framework for spatiotemporal data fusion: An instance of landsat 8 and sentinel 2 NDVI. J. Appl. Remote Sens. 2021, 15, 034520. [Google Scholar] [CrossRef]
- Sitaula, C.; Basnet, A.; Mainali, A.; Shahi, T.B. Deep learning-based methods for sentiment analysis on Nepali COVID-19-related tweets. Comput. Intell. Neurosci. 2021, 2021. [Google Scholar] [CrossRef]
- Zhang, X.; Han, L.; Dong, Y.; Shi, Y.; Huang, W.; Han, L.; González-Moreno, P.; Ma, H.; Ye, H.; Sobeih, T. A deep learning-based approach for automated yellow rust disease detection from high-resolution hyperspectral UAV images. Remote Sens. 2019, 11, 1554. [Google Scholar] [CrossRef]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, inception-resnet and the impact of residual connections on learning. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; Volume 31. [Google Scholar]
- Ha, J.G.; Moon, H.; Kwak, J.T.; Hassan, S.I.; Dang, M.; Lee, O.N.; Park, H.Y. Deep convolutional neural network for classifying Fusarium wilt of radish from unmanned aerial vehicles. J. Appl. Remote Sens. 2017, 11, 042621. [Google Scholar] [CrossRef]
- Chollet, F. Xception: Deep learning with depthwise separable convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1251–1258. [Google Scholar]
- Xue, J.; Su, B. Significant remote sensing vegetation indices: A review of developments and applications. J. Sensors 2017, 2017. [Google Scholar] [CrossRef]
- Shahi, T.B.; Xu, C.Y.; Neupane, A.; Fresser, D.; O’Connor, D.; Wright, G.; Guo, W. A cooperative scheme for late leaf spot estimation in peanut using UAV multispectral images. PLoS ONE 2023, 18, e0282486. [Google Scholar] [CrossRef] [PubMed]
- Sugiura, R.; Tsuda, S.; Tamiya, S.; Itoh, A.; Nishiwaki, K.; Murakami, N.; Shibuya, Y.; Hirafuji, M.; Nuske, S. Field phenotyping system for the assessment of potato late blight resistance using RGB imagery from an unmanned aerial vehicle. Biosyst. Eng. 2016, 148, 1–10. [Google Scholar] [CrossRef]
- Ye, H.; Huang, W.; Huang, S.; Cui, B.; Dong, Y.; Guo, A.; Ren, Y.; Jin, Y. Recognition of banana fusarium wilt based on UAV remote sensing. Remote Sens. 2020, 12, 938. [Google Scholar] [CrossRef]
- Calderón Madrid, R.; Navas Cortés, J.A.; Lucena León, C.; Zarco-Tejada, P.J. High-resolution hyperspectral and thermal imagery acquired from UAV platforms for early detection of Verticillium wilt using fluorescence, temperature and narrow-band indices. In Proceedings of the UAV-based Remote Sensing Methods for Monitoring Vegetation, Cologne, Germany, 11–12 September 2013. [Google Scholar]
- Matese, A.; Baraldi, R.; Berton, A.; Cesaraccio, C.; Di Gennaro, S.F.; Duce, P.; Facini, O.; Mameli, M.G.; Piga, A.; Zaldei, A. Estimation of water stress in grapevines using proximal and remote sensing methods. Remote Sens. 2018, 10, 114. [Google Scholar] [CrossRef]
- Nebiker, S.; Lack, N.; Abächerli, M.; Läderach, S. Light-weight multispectral UAV sensors and their capabilities for predicting grain yield and detecting plant diseases. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 963–970. [Google Scholar]
- Di Gennaro, S.F.; Battiston, E.; Di Marco, S.; Facini, O.; Matese, A.; Nocentini, M.; Palliotti, A.; Mugnai, L. Unmanned Aerial Vehicle (UAV)-based remote sensing to monitor grapevine leaf stripe disease within a vineyard affected by esca complex. Phytopathol. Mediterr. 2016, 55, 262–275. [Google Scholar]
- Heidarian Dehkordi, R.; El Jarroudi, M.; Kouadio, L.; Meersmans, J.; Beyer, M. Monitoring wheat leaf rust and stripe rust in winter wheat using high-resolution UAV-based red-green-blue imagery. Remote Sens. 2020, 12, 3696. [Google Scholar] [CrossRef]
- Ma, H.; Huang, W.; Dong, Y.; Liu, L.; Guo, A. Using UAV-Based Hyperspectral Imagery to Detect Winter Wheat Fusarium Head Blight. Remote Sens. 2021, 13, 3024. [Google Scholar] [CrossRef]
- Xavier, T.W.; Souto, R.N.; Statella, T.; Galbieri, R.; Santos, E.S.; S. Suli, G.; Zeilhofer, P. Identification of Ramularia leaf blight cotton disease infection levels by multispectral, multiscale UAV imagery. Drones 2019, 3, 33. [Google Scholar] [CrossRef]
- Rodriguez, J.; Lizarazo, I.; Prieto, F.; Angulo-Morales, V. Assessment of potato late blight from UAV-based multispectral imagery. Comput. Electron. Agric. 2021, 184, 106061. [Google Scholar] [CrossRef]
- Lizarazo, I.; Rodriguez, J.L.; Cristancho, O.; Olaya, F.; Duarte, M.; Prieto, F. Identification of symptoms related to potato Verticillium wilt from UAV-based multispectral imagery using an ensemble of gradient boosting machines. Smart Agric. Technol. 2023, 3, 100138. [Google Scholar] [CrossRef]
- Zhu, W.; Feng, Z.; Dai, S.; Zhang, P.; Wei, X. Using UAV Multispectral Remote Sensing with Appropriate Spatial Resolution and Machine Learning to Monitor Wheat Scab. Agriculture 2022, 12, 1785. [Google Scholar] [CrossRef]
- Bohnenkamp, D.; Behmann, J.; Mahlein, A.K. In-field detection of yellow rust in wheat on the ground canopy and UAV scale. Remote Sens. 2019, 11, 2495. [Google Scholar] [CrossRef]
- Narmilan, A.; Gonzalez, F.; Salgadoe, A.S.A.; Powell, K. Detection of white leaf disease in sugarcane using machine learning techniques over UAV multispectral images. Drones 2022, 6, 230. [Google Scholar] [CrossRef]
- DadrasJavan, F.; Samadzadegan, F.; Seyed Pourazar, S.H.; Fazeli, H. UAV-based multispectral imagery for fast Citrus Greening detection. J. Plant Dis. Prot. 2019, 126, 307–318. [Google Scholar] [CrossRef]
- Ahmadi, P.; Mansor, S.; Farjad, B.; Ghaderpour, E. Unmanned Aerial Vehicle (UAV)-based remote sensing for early-stage detection of Ganoderma. Remote Sens. 2022, 14, 1239. [Google Scholar] [CrossRef]
- Su, J.; Yi, D.; Su, B.; Mi, Z.; Liu, C.; Hu, X.; Xu, X.; Guo, L.; Chen, W.H. Aerial visual perception in smart farming: Field study of wheat yellow rust monitoring. IEEE Trans. Ind. Inform. 2020, 17, 2242–2249. [Google Scholar] [CrossRef]
- Kerkech, M.; Hafiane, A.; Canals, R. Vine disease detection in UAV multispectral images using optimized image registration and deep learning segmentation approach. Comput. Electron. Agric. 2020, 174, 105446. [Google Scholar] [CrossRef]
- Qian, Q.; Yu, K.; Yadav, P.K.; Dhal, S.; Kalafatis, S.; Thomasson, J.A.; Hardin IV, R.G. Cotton crop disease detection on remotely collected aerial images with deep learning. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping VII; SPIE: Bellingham, DC, USA, 2022; Volume 12114, pp. 23–31. [Google Scholar]
- Amarasingam, N.; Gonzalez, F.; Salgadoe, A.S.A.; Sandino, J.; Powell, K. Detection of White Leaf Disease in Sugarcane Crops Using UAV-Derived RGB Imagery with Existing Deep Learning Models. Remote Sens. 2022, 14, 6137. [Google Scholar] [CrossRef]
- Wu, H.; Wiesner-Hanks, T.; Stewart, E.L.; DeChant, C.; Kaczmar, N.; Gore, M.A.; Nelson, R.J.; Lipson, H. Autonomous detection of plant disease symptoms directly from aerial imagery. Plant Phenome J. 2019, 2, 1–9. [Google Scholar] [CrossRef]
- Pan, Q.; Gao, M.; Wu, P.; Yan, J.; Li, S. A deep-learning-based approach for wheat yellow rust disease recognition from unmanned aerial vehicle images. Sensors 2021, 21, 6540. [Google Scholar] [CrossRef]
- Deng, J.; Zhou, H.; Lv, X.; Yang, L.; Shang, J.; Sun, Q.; Zheng, X.; Zhou, C.; Zhao, B.; Wu, J.; et al. Applying convolutional neural networks for detecting wheat stripe rust transmission centers under complex field conditions using RGB-based high spatial resolution images from UAVs. Comput. Electron. Agric. 2022, 200, 107211. [Google Scholar] [CrossRef]
- Oliveira, A.J.; Assis, G.A.; Faria, E.R.; Souza, J.R.; Vivaldini, K.C.; Guizilini, V.; Ramos, F.; Mendes, C.C.; Wolf, D.F. Analysis of nematodes in coffee crops at different altitudes using aerial images. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar]
- Zhang, T.; Xu, Z.; Su, J.; Yang, Z.; Liu, C.; Chen, W.H.; Li, J. Ir-unet: Irregular segmentation u-shape network for wheat yellow rust detection by UAV multispectral imagery. Remote Sens. 2021, 13, 3892. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Proceedings, Part III 18. Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Zhang, T.; Yang, Z.; Xu, Z.; Li, J. Wheat yellow rust severity detection by efficient DF-UNet and UAV multispectral imagery. IEEE Sens. J. 2022, 22, 9057–9068. [Google Scholar] [CrossRef]
- Stewart, E.L.; Wiesner-Hanks, T.; Kaczmar, N.; DeChant, C.; Wu, H.; Lipson, H.; Nelson, R.J.; Gore, M.A. Quantitative phenotyping of Northern Leaf Blight in UAV images using deep learning. Remote Sens. 2019, 11, 2209. [Google Scholar] [CrossRef]
- Görlich, F.; Marks, E.; Mahlein, A.K.; König, K.; Lottes, P.; Stachniss, C. Uav-based classification of cercospora leaf spot using rgb images. Drones 2021, 5, 34. [Google Scholar] [CrossRef]
- Shi, Y.; Han, L.; Kleerekoper, A.; Chang, S.; Hu, T. Novel cropdocnet model for automated potato late blight disease detection from unmanned aerial vehicle-based hyperspectral imagery. Remote Sens. 2022, 14, 396. [Google Scholar] [CrossRef]
- Kerkech, M.; Hafiane, A.; Canals, R. VddNet: Vine disease detection network based on multispectral images and depth map. Remote Sens. 2020, 12, 3305. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Tetila, E.C.; Machado, B.B.; Menezes, G.K.; Oliveira, A.d.S.; Alvarez, M.; Amorim, W.P.; Belete, N.A.D.S.; Da Silva, G.G.; Pistori, H. Automatic recognition of soybean leaf diseases using UAV images and deep convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2019, 17, 903–907. [Google Scholar] [CrossRef]
- Ahmad, A.; Aggarwal, V.; Saraswat, D.; El Gamal, A.; Johal, G.S. GeoDLS: A deep learning-based corn disease tracking and location system using RTK geolocated UAS imagery. Remote Sens. 2022, 14, 4140. [Google Scholar] [CrossRef]
- Ishengoma, F.S.; Rai, I.A.; Said, R.N. Identification of maize leaves infected by fall armyworms using UAV-based imagery and convolutional neural networks. Comput. Electron. Agric. 2021, 184, 106124. [Google Scholar] [CrossRef]
- Dang, L.M.; Hassan, S.I.; Suhyeon, I.; kumar Sangaiah, A.; Mehmood, I.; Rho, S.; Seo, S.; Moon, H. UAV based wilt detection system via convolutional neural networks. Sustain. Comput. Inform. Syst. 2020, 28, 100250. [Google Scholar] [CrossRef]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. Imagenet large scale visual recognition challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef]
- Kerkech, M.; Hafiane, A.; Canals, R. Deep leaning approach with colorimetric spaces and vegetation indices for vine diseases detection in UAV images. Comput. Electron. Agric. 2018, 155, 237–243. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Zhang, L.; Wen, S.; Zhang, H.; Zhang, Y.; Deng, Y. Detection of helminthosporium leaf blotch disease based on UAV imagery. Appl. Sci. 2019, 9, 558. [Google Scholar] [CrossRef]
- Sugiura, R.; Tsuda, S.; Tsuji, H.; Murakami, N. Virus-infected plant detection in potato seed production field by UAV imagery. In Proceedings of the 2018 ASABE Annual International Meeting. American Society of Agricultural and Biological Engineers, Detroit, MI, USA, 29 July–1 August 2018; p. 1. [Google Scholar]
- Selvaraj, M.G.; Vergara, A.; Montenegro, F.; Ruiz, H.A.; Safari, N.; Raymaekers, D.; Ocimati, W.; Ntamwira, J.; Tits, L.; Omondi, A.B.; et al. Detection of banana plants and their major diseases through aerial images and machine learning methods: A case study in DR Congo and Republic of Benin. ISPRS J. Photogramm. Remote Sens. 2020, 169, 110–124. [Google Scholar] [CrossRef]
- Zhao, Z.Q.; Zheng, P.; Xu, S.t.; Wu, X. Object detection with deep learning: A review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef] [PubMed]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Butte, S.; Vakanski, A.; Duellman, K.; Wang, H.; Mirkouei, A. Potato crop stress identification in aerial images using deep learning-based object detection. Agron. J. 2021, 113, 3991–4002. [Google Scholar] [CrossRef]
- Zhao, R.; Shi, F. A novel strategy for pest disease detection of Brassica chinensis based on UAV imagery and deep learning. Int. J. Remote Sens. 2022, 43, 7083–7103. [Google Scholar] [CrossRef]
- Bao, W.; Zhu, Z.; Hu, G.; Zhou, X.; Zhang, D.; Yang, X. UAV remote sensing detection of tea leaf blight based on DDMA-YOLO. Comput. Electron. Agric. 2023, 205, 107637. [Google Scholar] [CrossRef]












| Ref. | Focused Area | Features and Highlights | Limitations and Gaps |
|---|---|---|---|
| [22] | Plant stress monitoring |
|
|
| [23] | Crop disease detection with UAVs |
|
|
| [24] | Early crop disease identification |
|
|
| [26] | UAVs for plant and crop disease detection |
|
|
| [9] | UAVs for precision agriculture |
|
|
| [27] | Aerial HS imaging for crop disease |
|
|
| [28] | UAV thermal imagery for PA |
|
|
| Ref. | Vegetation Index | Formula |
|---|---|---|
| [44] | Normalized difference VI (NDVI) | |
| [45] | Normalized difference red edge VI (NDRE) | |
| [46] | Green VI (GVI) | |
| [47] | Difference VI (DVI) | |
| [48] | Excess Green (ExG) VI | |
| [49] | Green normalized difference VI (GNDVI) | |
| [49] | Soil adjusted VI (SAVI) | |
| [17] | Simple ratio (SR) | |
| [16] | Plant senescence reflectance index (PSRI) | |
| [50] | Chlorophyll Index (CI) | |
| [51] | Green leaf index (GLI) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahi, T.B.; Xu, C.-Y.; Neupane, A.; Guo, W. Recent Advances in Crop Disease Detection Using UAV and Deep Learning Techniques. Remote Sens. 2023, 15, 2450. https://doi.org/10.3390/rs15092450
Shahi TB, Xu C-Y, Neupane A, Guo W. Recent Advances in Crop Disease Detection Using UAV and Deep Learning Techniques. Remote Sensing. 2023; 15(9):2450. https://doi.org/10.3390/rs15092450
Chicago/Turabian StyleShahi, Tej Bahadur, Cheng-Yuan Xu, Arjun Neupane, and William Guo. 2023. "Recent Advances in Crop Disease Detection Using UAV and Deep Learning Techniques" Remote Sensing 15, no. 9: 2450. https://doi.org/10.3390/rs15092450
APA StyleShahi, T. B., Xu, C.-Y., Neupane, A., & Guo, W. (2023). Recent Advances in Crop Disease Detection Using UAV and Deep Learning Techniques. Remote Sensing, 15(9), 2450. https://doi.org/10.3390/rs15092450