
STPF-Net: Short-Term Precipitation Forecast Based on a Recurrent Neural Network


Abstract
:1. Introduction
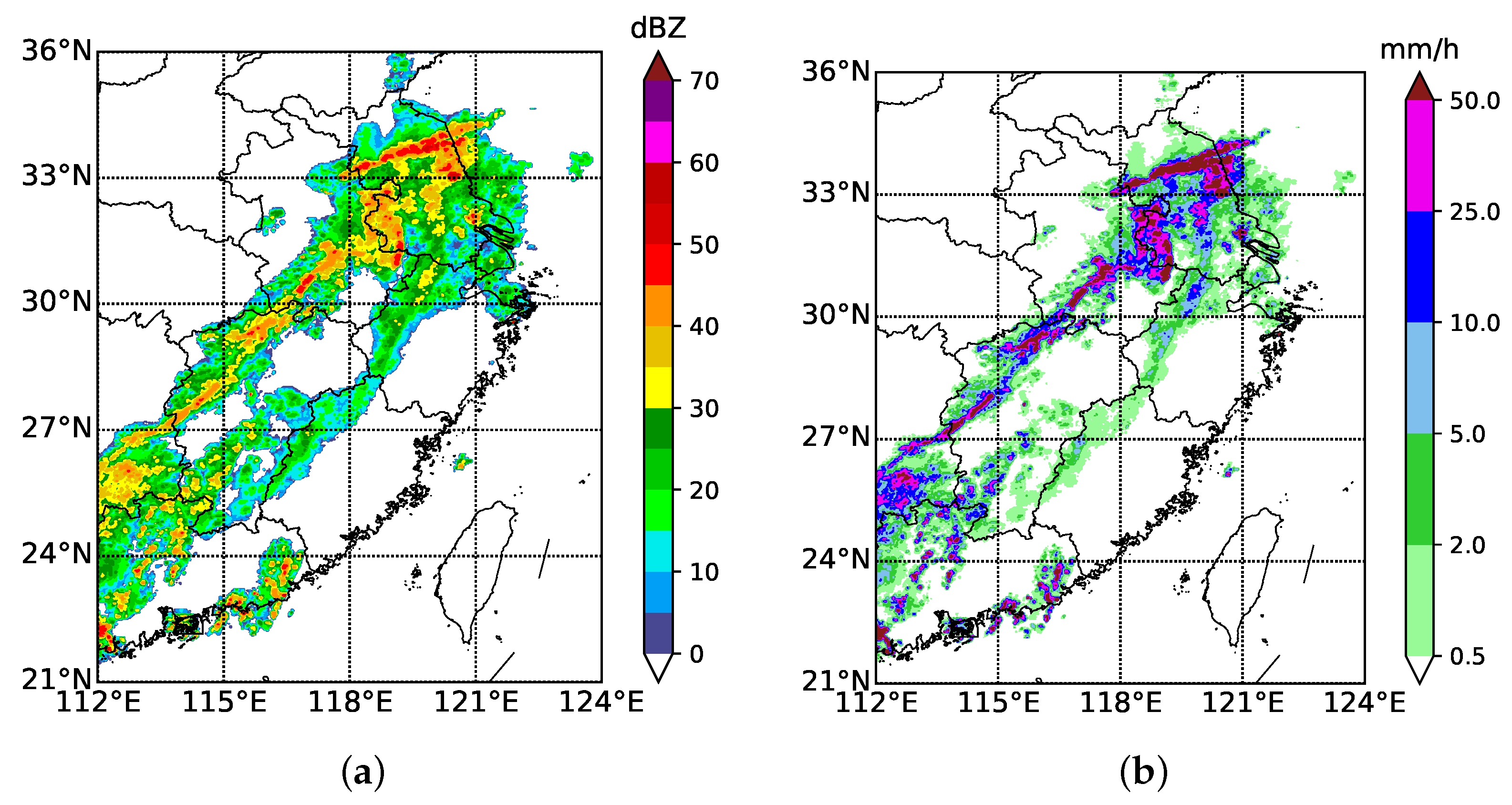
2. Data
3. Model
3.1. Temporal Encoding and Prediction with Multi-Tier Structure
3.2. Spatiotemporal Information Extraction
4. Experiments
4.1. Implementation Details
4.2. Evaluation Metrics
5. Results and Discussion
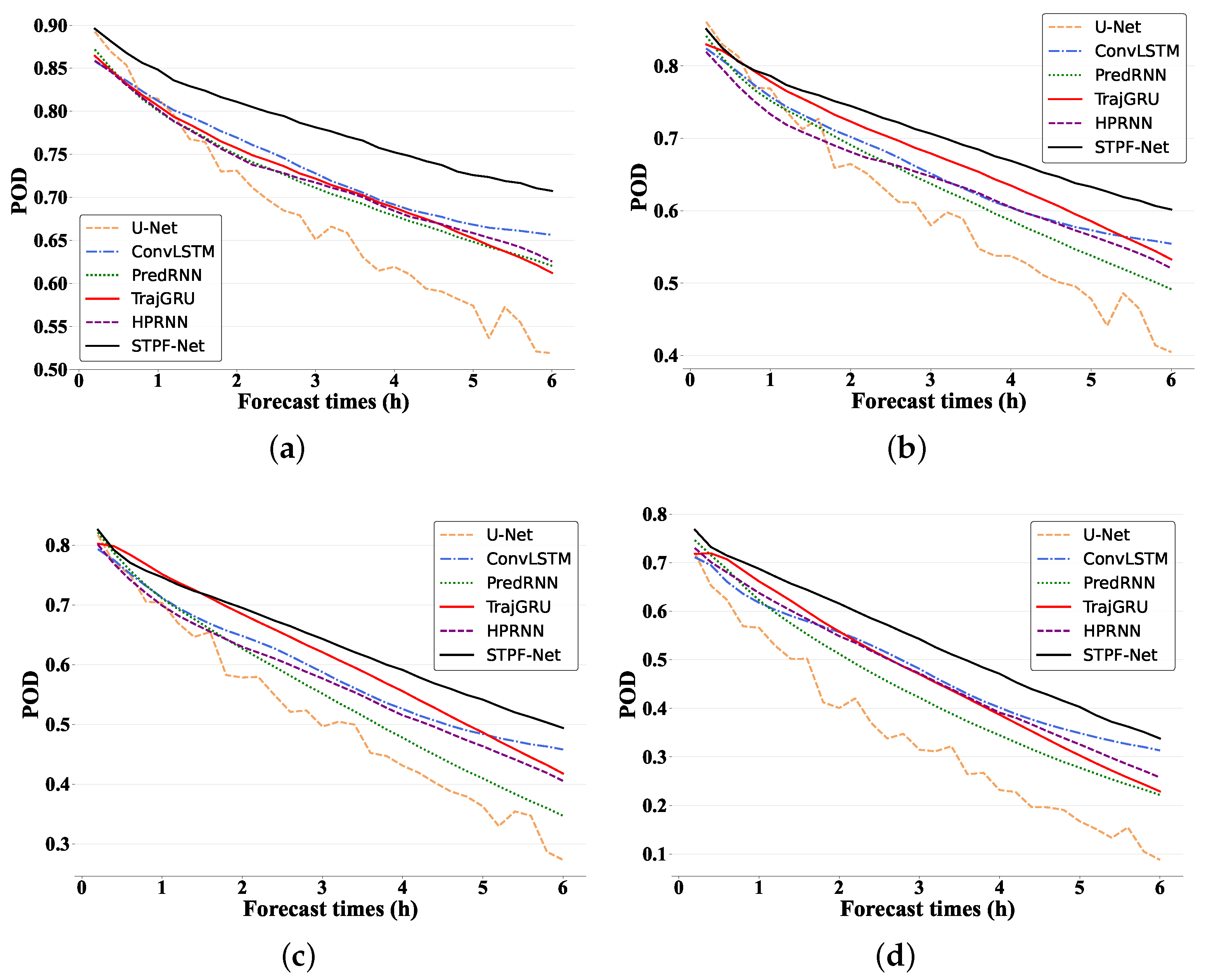
5.1. Performance on 6 h Predictions
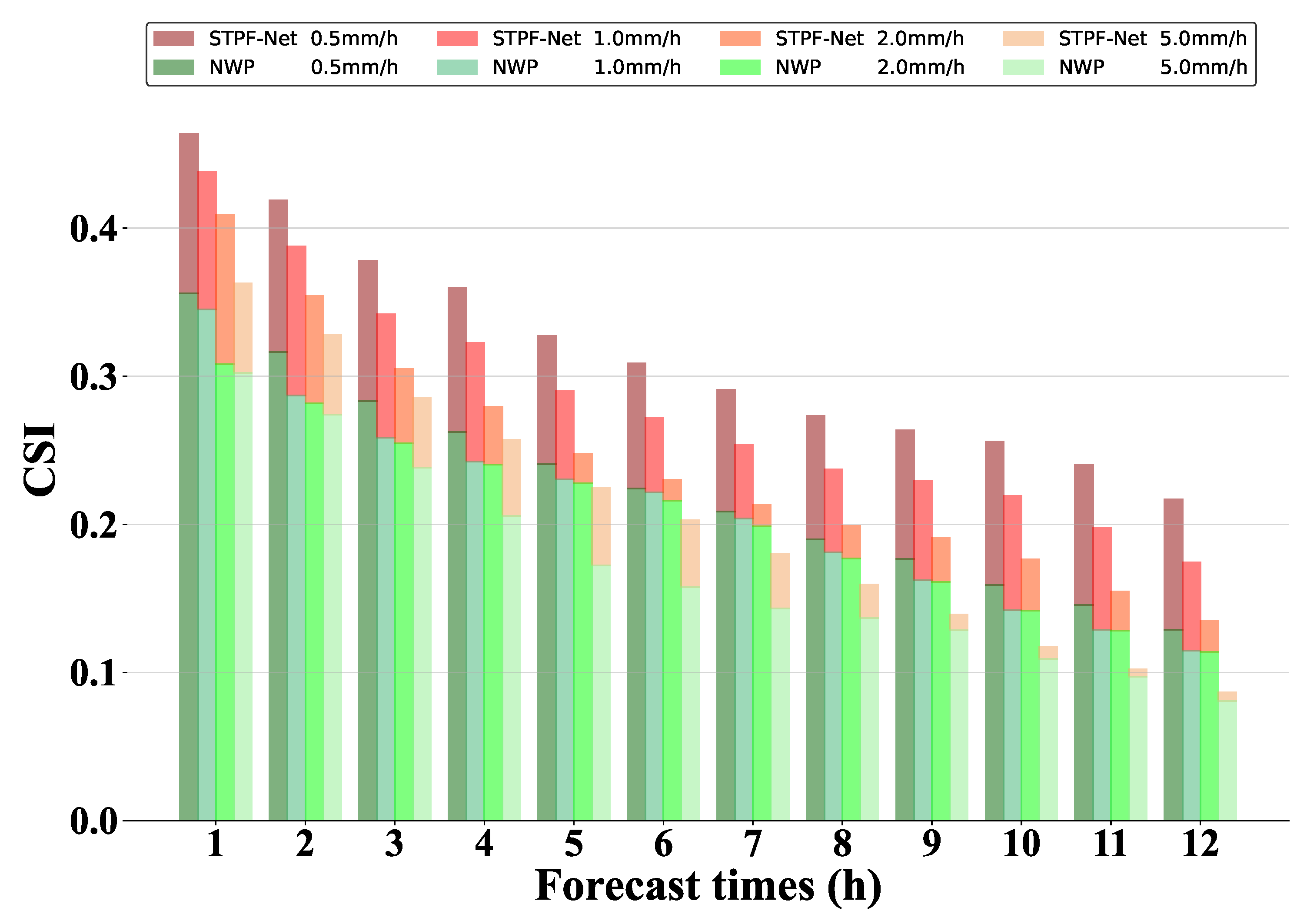
5.2. Extending Forecast Time to 12 h
5.3. Case Study and Visual Assessment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bauer, P.; Thorpe, A.; Brunet, G. The quiet revolution of numerical weather prediction. Nature 2015, 525, 47–55. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.Y.; Pan, H.L. Convective trigger function for a mass-flux cumulus parameterization scheme. Mon. Weather Rev. 1998, 126, 2599–2620. [Google Scholar] [CrossRef]
- Bechtold, P.; Semane, N.; Lopez, P.; Chaboureau, J.P.; Bormann, N. Representing equilibrium and nonequilibrium convection in large-scale models. J. Atmos. Sci. 2014, 71, 734–753. [Google Scholar] [CrossRef]
- Bannister, R.N. A review of operational methods of variational and ensemble-variational data assimilation. Q. J. R. Meteorol. Soc. 2017, 143, 607–633. [Google Scholar] [CrossRef]
- Barker, D.M.; Huang, W.; Guo, Y.R.; Bourgeois, A.J.; Xiao, Q.N. A three-dimensional variational data assimilation system for MM5: Implementation and initial results. Mon. Weather Rev. 2004, 132, 897–914. [Google Scholar] [CrossRef]
- Lorenc, A.C. The potential of the ensemble kalman filter for nwp—A comparison with 4D-Var. Q. J. R. Meteorol. Soc. 2010, 129, 3183–3203. [Google Scholar] [CrossRef]
- Short-range quantitative precipitation forecasting in Hong Kong. J. Hydrol. 2004, 288, 189–209. [CrossRef]
- Done, C.A.D.J.; Weisman, M. The next generation of NWP: Explicit forecastsof convection using the weather research andforecasting (WRF) model. Atmos. Sci. Lett. 2004, 5, 110–117. [Google Scholar] [CrossRef]
- Mecklenburg, S.; Joss, J.; Schmid, W. Improving the nowcasting of precipitation in an alpine region with an enhanced radar echo tracking algorithm. J. Hydrol. 2000, 239, 46–68. [Google Scholar] [CrossRef]
- Li, L.; Schmid, W.; Joss, J. Nowcasting of motion and growth of precipitation with radar over a complex orography. J. Appl. Meteorol. 1995, 34, 1286–1300. [Google Scholar] [CrossRef]
- Han, L.; Fu, S.-X.; Zhao, L.-F.; Zheng, Y.; Wang, H.-Q.; Lin, Y. 3d convective storm identification, tracking, and forecasting—An enhanced titan algorithm. J. Atmos. Ocean. Technol. 2009, 26, 719–732. [Google Scholar] [CrossRef]
- Hou, J.; Wang, P. Storm tracking via tree structure representation of radar data. J. Atmos. Ocean. Technol. 2017, 34, 729–747. [Google Scholar] [CrossRef]
- Bowler, N.E.; Pierce, C.; Seed, A.W. Development of a precipitation nowcasting algorithm based upon optical flow techniques. J. Hydrol. 2004, 288, 74–91. [Google Scholar] [CrossRef]
- Reichstein, M.; Camps-Valls, G.; Stevens, B.; Jung, M.; Denzler, J.; Carvalhais, N.; Prabhat. Deep learning and process understanding for data-driven earth system science. Nature 2019, 566, 195. [Google Scholar] [CrossRef] [PubMed]
- Schultz, M.G.; Betancourt, C.; Gong, B.; Kleinert, F.; Stadtler, S. Can deep learning beat numerical weather prediction? Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2021, 379, 20200097. [Google Scholar] [CrossRef] [PubMed]
- Prudden, R.; Adams, S.; Kangin, D.; Robinson, N.; Ravuri, S.; Mohamed, S.; Arribas, A. A review of radar-based nowcasting of precipitation and applicable machine learning techniques. arXiv 2020, arXiv:2005.04988. [Google Scholar]
- Shi, X.; Yeung, D.Y. Machine learning for spatiotemporal sequence forecasting: A survey. arXiv 2018, arXiv:1808.06865. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Cho, K.; Merrienboer, B.V.; Gulcehre, C.; BaHdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.C.; Bengio, Y. Generative adversarial nets. arXiv 2014, arXiv:1406.2661. [Google Scholar]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional neural networks on graphs with fast localized spectral filtering. In Proceedings of the 30th Conference on Neural Information Processing Systems (NIPS 2016), Barcelona, Spain, 5–10 December 2016. [Google Scholar]
- Agrawal, S.; Barrington, L.; Bromberg, C.; Burge, J.; Gazen, C.; Hickey, J. Machine learning for precipitation nowcasting from radar images. arXiv 2019, arXiv:1912.12132. [Google Scholar]
- Ayzel, G.; Scheffer, T.; Heistermann, M. Rainnet v1.0: A convolutional neural network for radar-based precipitation nowcasting. Geosci. Model Dev. 2020, 13, 2631–2644. [Google Scholar] [CrossRef]
- Han, L.; Sun, J.; Zhang, W. Convolutional neural network for convective storm nowcasting using 3D doppler weather radar data. IEEE Trans. Geosci. Remote Sens. 2019, 58, 1487–1495. [Google Scholar] [CrossRef]
- Han, L.; Liang, H.; Chen, H.; Zhang, W.; Ge, Y. Convective precipitation nowcasting using U-Net model. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4103508. [Google Scholar] [CrossRef]
- Trebing, K.; Staǹczyk, T.; Mehrkanoon, S. SmaAt-UNet: Precipitation nowcasting using a small attention-UNet architecture. Pattern Recognit. Lett. 2021, 145, 178–186. [Google Scholar] [CrossRef]
- Kaparakis, C.; Mehrkanoon, S. Wf-unet: Weather fusion unet for precipitation nowcasting. arXiv 2023, arXiv:2302.04102. [Google Scholar]
- Chen, G.; Wang, W. Short-term precipitation prediction for contiguous united states using deep learning. Geophys. Res. Lett. 2022, 49, e2022GL097904. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.-Y.; Wong, W.-k.; Woo, W.-c. Convolutional lstm network: A machine learning approach for precipitation nowcasting. In Proceedings of the 28th International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015. [Google Scholar]
- Shi, X.; Gao, Z.; Lausen, L.; Wang, H.; Yeung, D.-Y.; Wong, W.-k.; Woo, W.-c. Deep learning for precipitation nowcasting: A benchmark and a new model. In Proceedings of the 31st Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Wang, Y.; Long, M.; Wang, J.; Gao, Z.; Yu, P.S. PredRNN: Recurrent neural networks for predictive learning using spatiotemporal LSTMs. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; pp. 879–888. [Google Scholar]
- Wang, Y.; Gao, z.; Long, M.; Wang, J.; Yu, P.S. PredRNN++: Towards a resolution of the deep-in-time dilemma in spatiotemporal predictive learning. arXiv 2018, arXiv:1804.06300. [Google Scholar]
- Jing, J.; Li, Q.; Peng, X.; Ma, Q.; Tang, S. HPRNN: A hierarchical sequence prediction model for long-term weather radar echo extrapolation. In Proceedings of the ICASSP 2020-2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020. [Google Scholar]
- Snderby, C.K.; Espeholt, L.; Heek, J.; Dehghani, M.; Oliver, A.; Salimans, T.; Agrawal, S.; Hickey, J.; Kalchbrenner, N. MetNet: A neural weather model for precipitation forecasting. arXiv 2020, arXiv:2003.12140. [Google Scholar]
- Espeholt, L.; Agrawal, S.; Sønderby, C.; Kumar, M.; Heek, J.; Bromberg, C.; Gazen, C.; Hickey, J.; Bell, A.; Kalchbrenner, N. Skillful twelve hour precipitation forecasts using large context neural networks. arXiv 2021, arXiv:2111.07470. [Google Scholar]
- Yan, B.Y.; Yang, C.; Chen, F.; Takeda, K.; Wang, C. FDNet: A deep learning approach with two parallel cross encoding pathways for precipitation nowcasting. arXiv 2021, arXiv:2105.02585. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, X.; Guan, J.; Wu, M.; Guo, L. RN-Net: A deep learning approach to 0–2 h rainfall nowcasting based on radar and automatic weather station data. Sensors 2021, 21, 1981. [Google Scholar] [CrossRef] [PubMed]
- Klocek, S.; Dong, H.; Dixon, M.; Kanengoni, P.; Kazmi, N.; Luferenko, P.; Lv, Z.; Sharma, S.; Weyn, J.; Xiang, S. MS-nowcasting: Operational precipitation nowcasting with convolutional lstms at microsoft weather. arXiv 2021, arXiv:2111.09954. [Google Scholar]
- Liu, J.; Xu, L.; Chen, N. A spatiotemporal deep learning model ST-LSTM-SA for hourly rainfall forecasting using radar echo images. J. Hydrol. 2022, 609, 127748. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, H.; Han, L.; Zhang, R.; Ge, Y. Pixel-CRN: A new machine learning approach for convective storm nowcasting. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4102212. [Google Scholar] [CrossRef]
- Ravuri, S.; Lenc, K.; Willson, M.; Kangin, D.; Lam, R.; Mirowski, P.; Fitzsimons, M.; Athanassiadou, M.; Kashem, S.; Madge, S. Skillful precipitation nowcasting using deep generative models of radar. Nature 2021, 597, 672–677. [Google Scholar] [CrossRef]
- Kim, Y.; Hong, S. Very short-term rainfall prediction using ground radar observations and conditional generative adversarial networks. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4104308. [Google Scholar] [CrossRef]
- Zhang, Y.; Long, M.; Chen, K.; Xing, L.; Jin, R.; Jordan, M.I.; Wang, J. Skilful nowcasting of extreme precipitation with NowcastNet. Nature 2023, 619, 526–532. [Google Scholar] [CrossRef]
- Bai, C.; Sun, F.; Zhang, J.; Song, Y.; Chen, S. Rainformer: Features extraction balanced network for radar-based precipitation nowcasting. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4023305. [Google Scholar] [CrossRef]
- Gao, Z.; Shi, X.; Wang, H.; Zhu, Y.; Wang, Y.B.; Li, M.; Yeung, D.-Y. Earthformer: Exploring space-time transformers for earth system forecasting. Adv. Neural Inf. Process. Syst. 2022, 35, 390–403. [Google Scholar]
- Hu, Y.; Chen, L.; Wang, Z.; Li, H. Swinvrnn: A data-driven ensemble forecasting model via learned distribution perturbation. J. Adv. Model. Earth Syst. 2022, 15, e2022MS003211. [Google Scholar] [CrossRef]
- Wu, T.; Wan, Y.; Weifeng, W.; Leng, L. Design and application of radar reflectivity quality control algorithm in SWAN. Meteorol. Sci. Technol. 2013, 41, 809–817. [Google Scholar]
- Li, P.W.; Wong, W.-K.; Chan, K.Y.; Lai, E.S.T. Swirls—An Evolving Nowcasting System; Hong Kong Special Administrative Region Government: Hong Kong, China, 2000.
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. arXiv 2021, arXiv:2103.14030. [Google Scholar]
- Bojesomo, A.; Al-Marzouqi, H.; Liatsis, P. A novel transformer network with shifted window cross-attention for spatiotemporal weather forecasting. arXiv 2022, arXiv:2208.01252. [Google Scholar] [CrossRef]
- Zhang, R.H.; Shen, X.S. On the development of the GRAPES—A new generation of the national operational NWP system in China. Sci. Bull. 2008, 53, 3429–3432. [Google Scholar] [CrossRef]
- Chen, D. Recent progress on GRAPES research and application. J. Appl. Meteorol. Sci. 2006, 6, 1001–7313. [Google Scholar]
- Chen, D.H.; Xue, J.S.; Yang, X.S.; Zhang, H.L.; Shen, X.S.; Jianglin, H.U.; Wang, Y.; Amp, L.R. New generation of multi-scale NWP system (GRAPES):general scientific design. Chin. Sci. Bull. 2008, 53, 3433–3445. [Google Scholar] [CrossRef]
- Liu, D.; Jie, F.; Li, J.; Wang, J. The impacts of time-step size and spatial resolution on the prediction skill of the GRAPES-meso forecast system. Chin. J. Atmos. Sci. 2015, 42, 1146–1156. [Google Scholar]
- Zhang, X.; Tang, W.; Zheng, Y.; Sheng, J.; Zhu, W. Comprehensive evaluations of GRAPES_3km numerical model in forecasting convective storms using various verification methods. Meteorol. Mon. 2020, 46, 14. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. Pytorch: An imperative style, high-performance deep learning library. arXiv 2019, arXiv:1912.01703. [Google Scholar]
- Zhang, F.; Wang, X.; Guan, J. A novel multi-input multi-output recurrent neural network based on multimodal fusion and spatiotemporal prediction for 0–4 h precipitation nowcasting. Atmosphere 2021, 12, 1596. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | CSI↑ | HSS↑ | POD↑ | FAR↓ | BIAS | BMSE↓ | BMAE↓ |
|---|---|---|---|---|---|---|---|
| U-Net | 0.3846 | 0.4828 | 0.5347 | 0.4399 | 0.7376 | 0.0242 | 0.1028 |
| ConvLSTM | 0.4323 | 0.5373 | 0.6164 | 0.4242 | 1.0645 | 0.0213 | 0.0939 |
| PredRNN | 0.4341 | 0.5404 | 0.5877 | 0.3927 | 0.9305 | 0.0204 | 0.0905 |
| TrajGRU | 0.4265 | 0.5295 | 0.6206 | 0.4368 | 1.0917 | 0.0213 | 0.0959 |
| HPRNN | 0.4390 | 0.5431 | 0.6041 | 0.3989 | 0.9967 | 0.0204 | 0.0927 |
| STPF-Net | 0.4486 | 0.5517 | 0.6668 | 0.4348 | 1.1819 | 0.0199 | 0.0932 |
| Model | CSI↑ | HSS↑ | POD↑ | FAR↓ | BIAS | BMSE↓ | BMAE↓ |
|---|---|---|---|---|---|---|---|
| U-Net | 0.3008 | 0.3742 | 0.4392 | 0.5241 | 0.8991 | 0.0304 | 0.1205 |
| ConvLSTM | 0.3166 | 0.3973 | 0.4475 | 0.4972 | 0.8503 | 0.0301 | 0.1175 |
| PredRNN | 0.2924 | 0.3676 | 0.4134 | 0.5131 | 0.6550 | 0.0315 | 0.1213 |
| TrajGRU | 0.3071 | 0.3838 | 0.4383 | 0.5156 | 0.8524 | 0.0318 | 0.1198 |
| HPRNN | 0.3225 | 0.4055 | 0.4627 | 0.5021 | 0.9430 | 0.0304 | 0.1169 |
| STPF-Net | 0.3413 | 0.4205 | 0.5297 | 0.5303 | 1.1019 | 0.0287 | 0.1164 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Wang, X.; Guan, J.; Zhang, L.; Zhang, F.; Chang, T. STPF-Net: Short-Term Precipitation Forecast Based on a Recurrent Neural Network. Remote Sens. 2024, 16, 52. https://doi.org/10.3390/rs16010052
Wang J, Wang X, Guan J, Zhang L, Zhang F, Chang T. STPF-Net: Short-Term Precipitation Forecast Based on a Recurrent Neural Network. Remote Sensing. 2024; 16(1):52. https://doi.org/10.3390/rs16010052
Chicago/Turabian StyleWang, Jingnan, Xiaodong Wang, Jiping Guan, Lifeng Zhang, Fuhan Zhang, and Tao Chang. 2024. "STPF-Net: Short-Term Precipitation Forecast Based on a Recurrent Neural Network" Remote Sensing 16, no. 1: 52. https://doi.org/10.3390/rs16010052
APA StyleWang, J., Wang, X., Guan, J., Zhang, L., Zhang, F., & Chang, T. (2024). STPF-Net: Short-Term Precipitation Forecast Based on a Recurrent Neural Network. Remote Sensing, 16(1), 52. https://doi.org/10.3390/rs16010052