
Geostationary Satellite-Based Overshooting Top Detections and Their Relationship to Severe Weather over Eastern China

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data
2.1.1. H8 Data
2.1.2. FY4A Data
2.1.3. GPM-Observed OT Dataset
2.1.4. Weather Station Data
2.2. Methods
2.2.1. IRW-Texture OT Detection Algorithm
2.2.2. IR Contour-Based OT Detection Algorithm
3. Performance Comparison of OT Detection
3.1. Case Study with Two OT Detection Algorithms
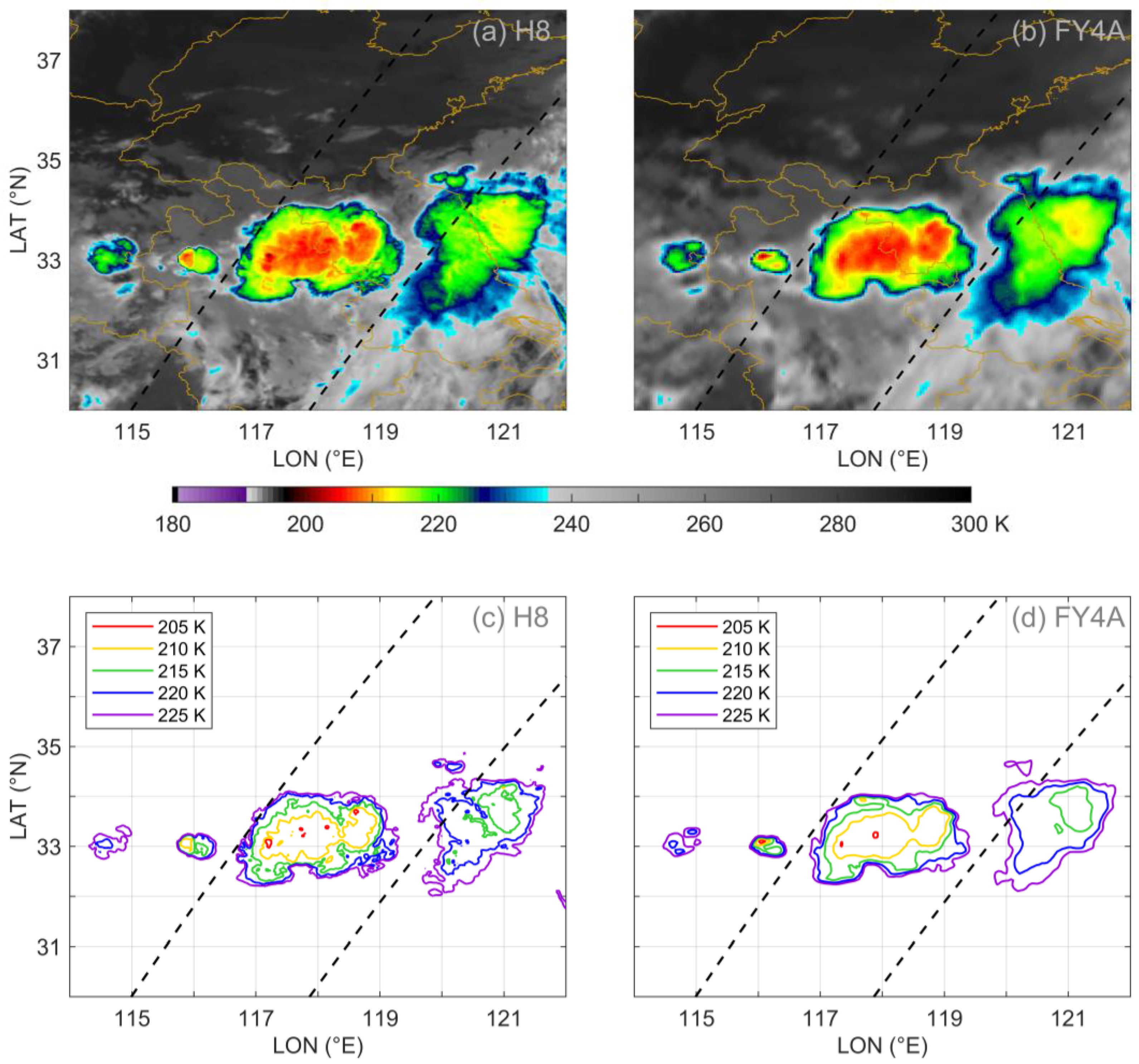
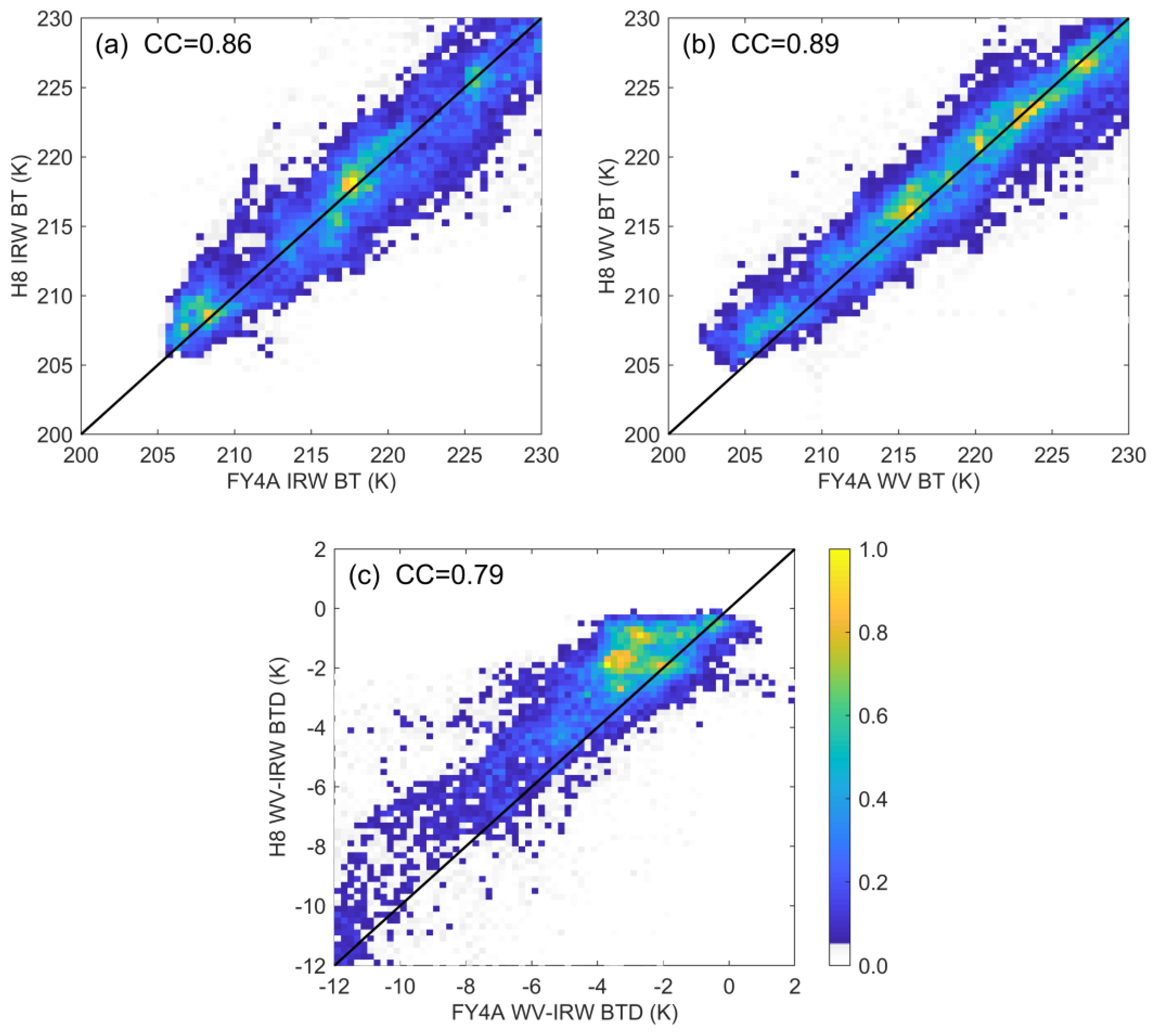
3.2. Case Study with Two Geostationary Satellites
3.3. Long-Term Evaluation Based on GPM Observation
4. Severe Weather Analysis Associated with OT Occurrence
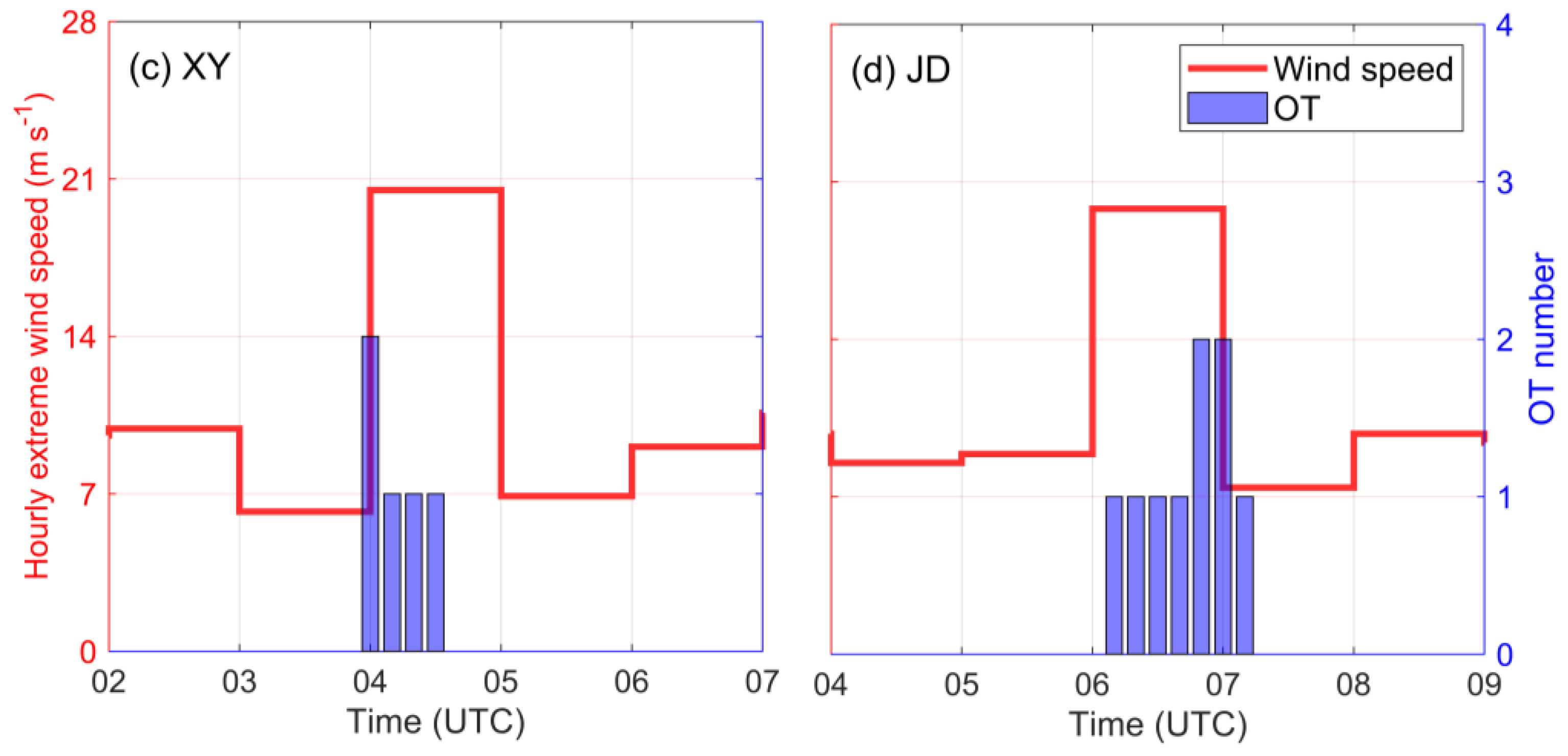
4.1. Typical Examples
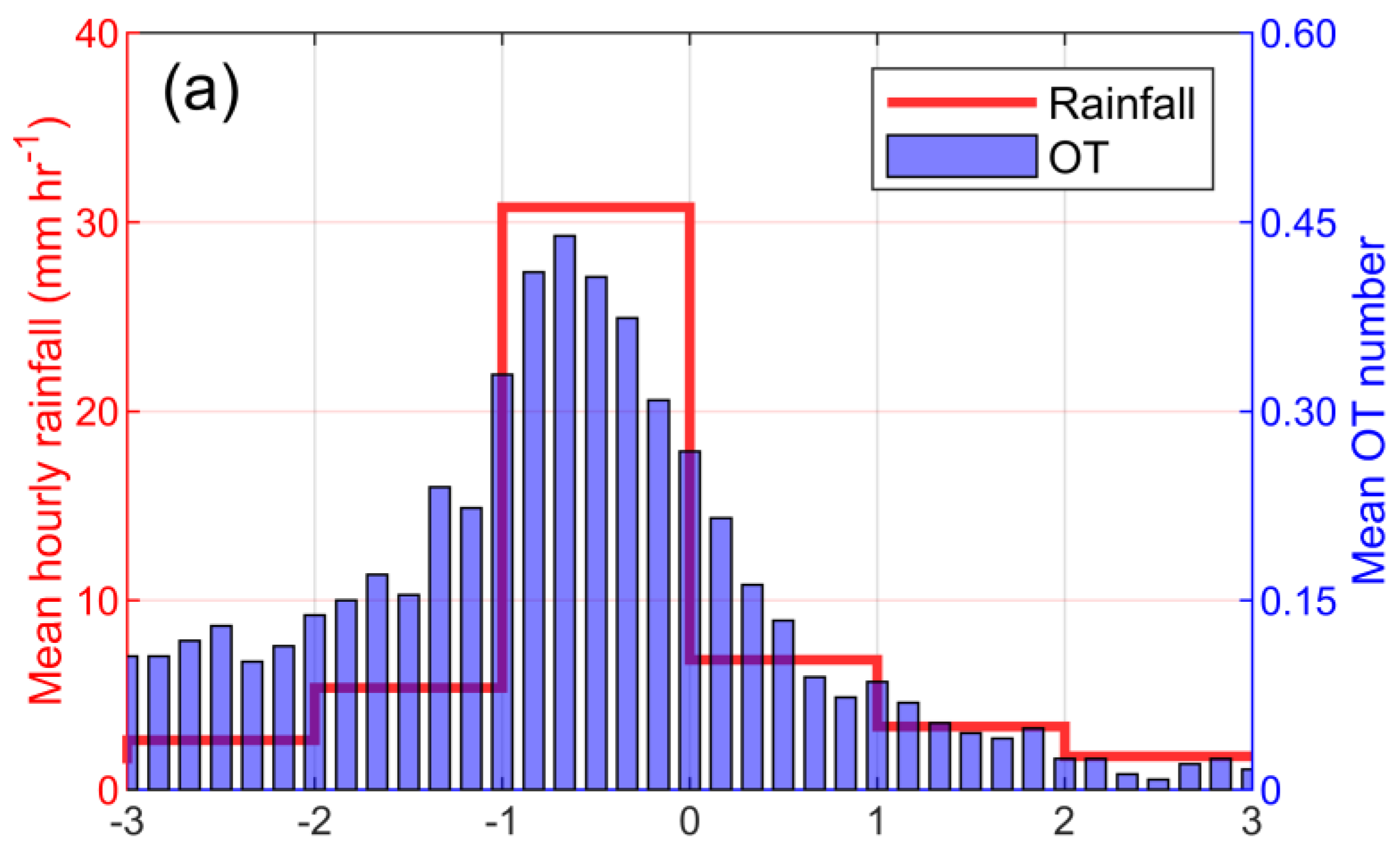
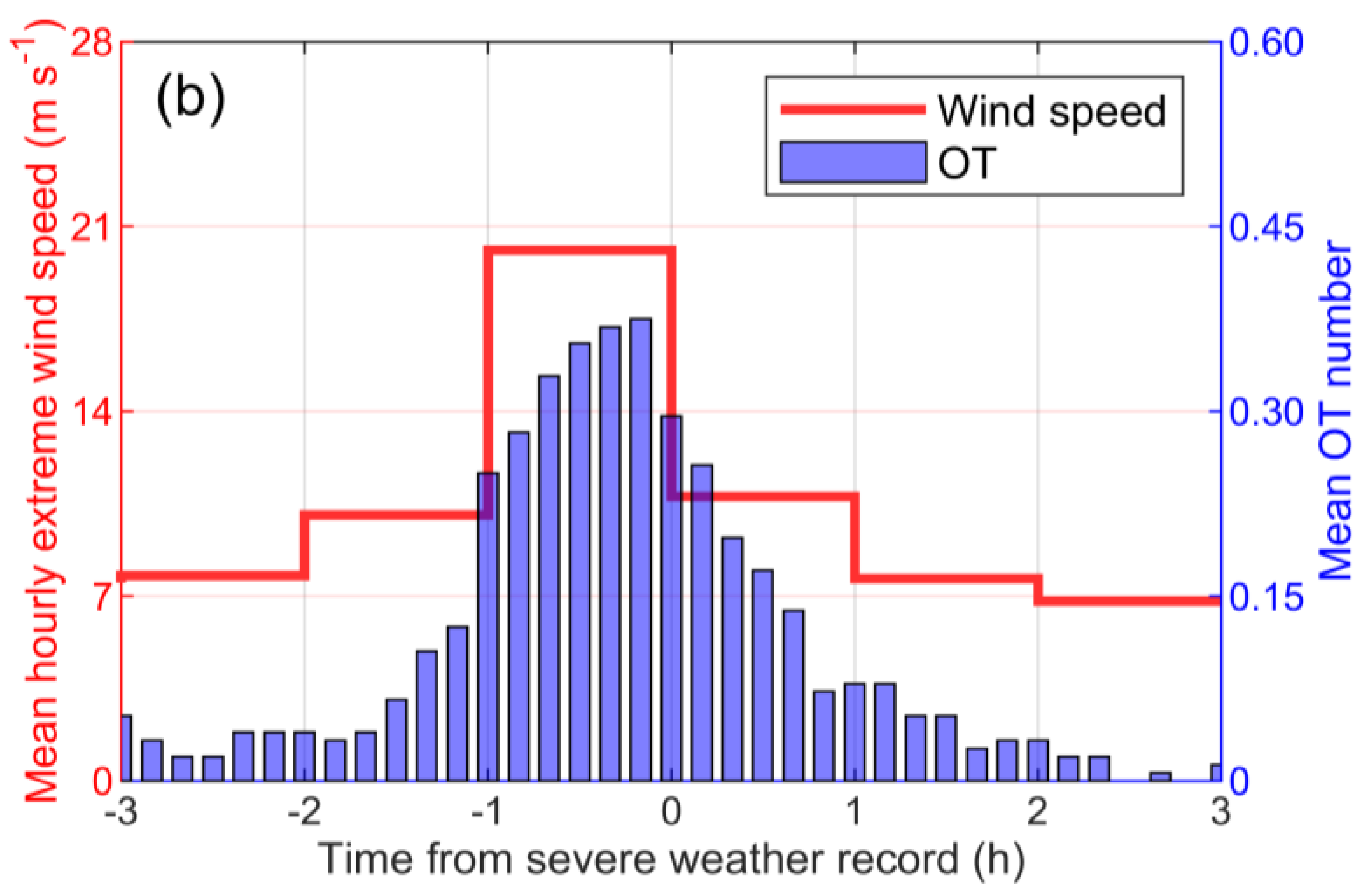
4.2. Statistical Analysis
5. Discussion
6. Conclusions
- (1)
- The IR contour-based algorithm paired with the H8 satellite exhibits better performance than the other combinations for automated OT detections in eastern China. Specifically, the H8 satellite identifies OTs with higher accuracy than FY4A in both algorithms, as evidenced by a greater POD and a lower FAR. Furthermore, the IR contour-based algorithm outperforms the IRW-texture algorithm in overall OT detection accuracy, particularly in reducing the FAR.
- (2)
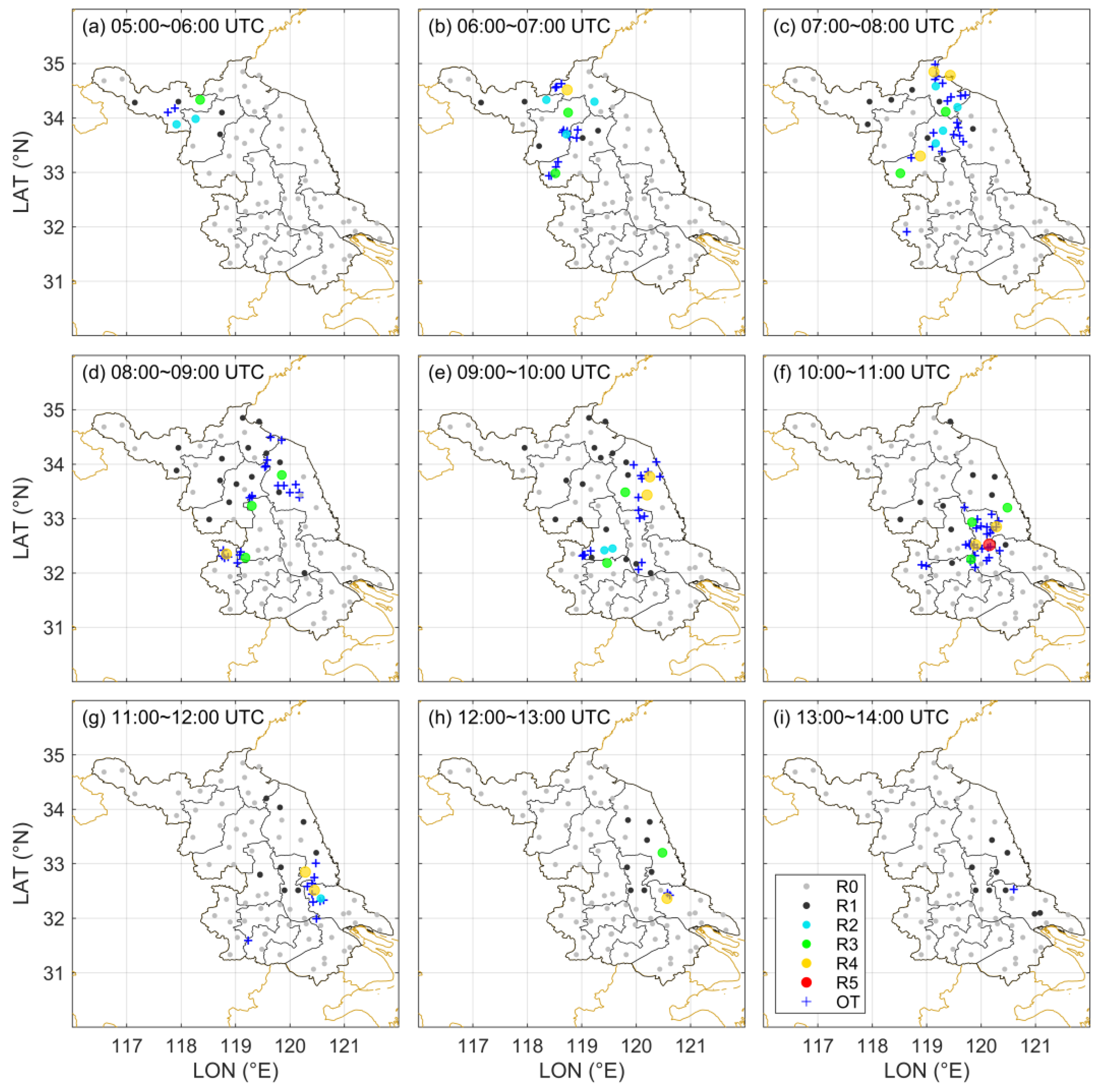
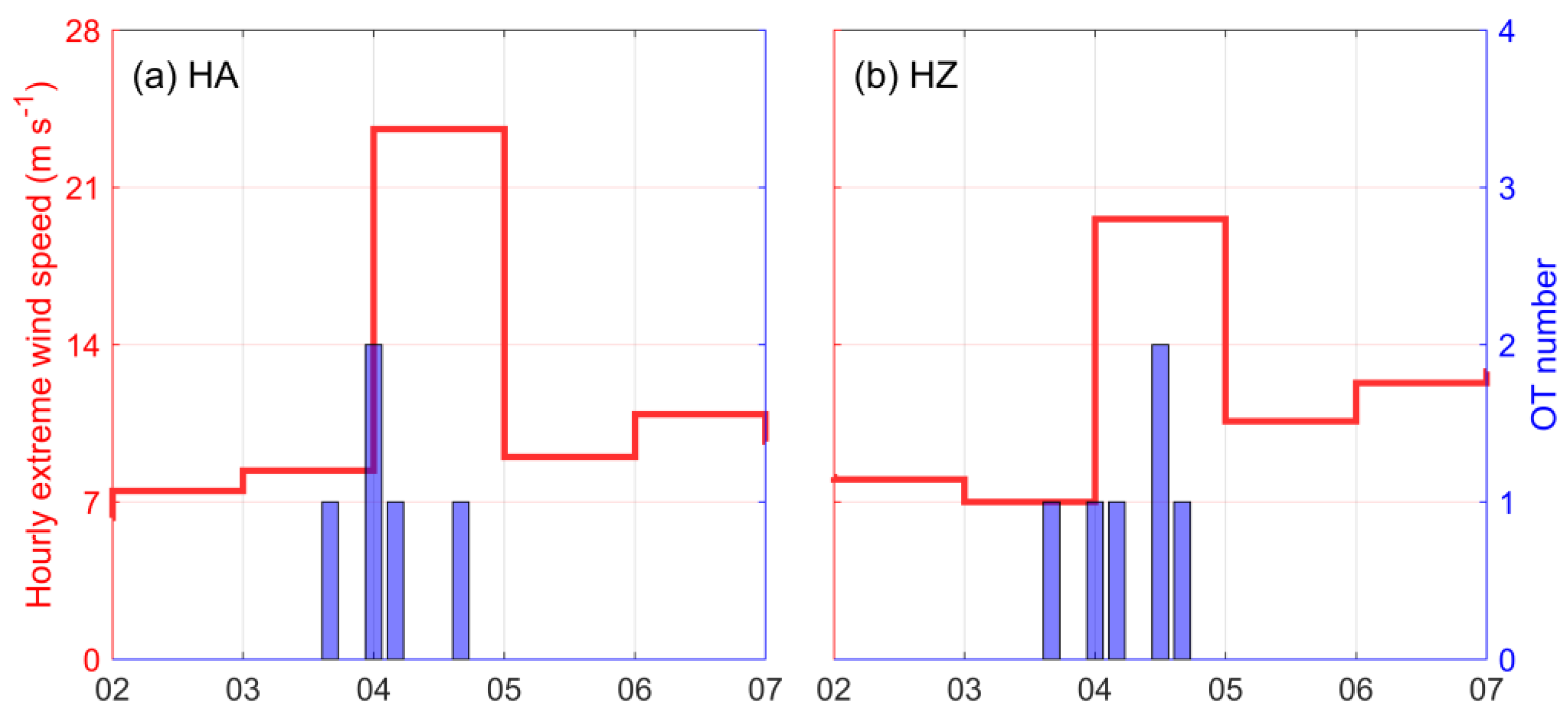
- OTs detected by the IR contour-based algorithm using the H8 satellite serve as a good indicator for occurrences of severe weather events. Specifically, concentrated bursts of H8-detected OTs are spatiotemporally in agreement with occurrences of severe weather events. Under the matched criteria of a 30 min time window and 30 km space window, the matched percentages of H8-detected OTs for short-term heavy rainfall and extreme wind are 61.8% and 54.0%, respectively.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brunner, J.C.; Ackerman, S.A.; Bachmeier, A.S.; Rabin, R.M. A quantitative analysis of the enhanced-V feature in relation to severe weather. Weather Forecast. 2007, 22, 853–872. [Google Scholar] [CrossRef]
- Bedka, K.M. Overshooting cloud top detections using MSG SEVIRI infrared brightness temperatures and their relationship to severe weather over Europe. Atmos. Res. 2011, 99, 175–189. [Google Scholar] [CrossRef]
- Dworak, R.; Bedka, K.; Brunner, J.; Feltz, W. Comparison between GOES-12 Overshooting-Top Detections, WSR-88D Radar Reflectivity, and Severe Storm Reports. Weather Forecast. 2012, 27, 684–699. [Google Scholar] [CrossRef]
- Bedka, K.M.; Wang, C.; Rogers, R.; Carey, L.; Feltz, W.; Kanak, J. Examining Deep Convective Cloud Evolution Using Total Lightning, WSR-88D, and GOES-14 Super Rapid Scan Datasets. Weather Forecast. 2015, 30, 571–590. [Google Scholar] [CrossRef]
- Bluestein, H.B.; Lindsey, D.T.; Bikos, D.; Reif, D.W.; Wienhoff, Z.B. The Relationship between Overshooting Tops in a Tornadic Supercell and Its Radar-Observed Evolution. Mon. Weather Rev. 2019, 147, 4151–4176. [Google Scholar] [CrossRef]
- Marion, G.R.; Trapp, R.J.; Nesbitt, S.W. Using Overshooting Top Area to Discriminate Potential for Large, Intense Tornadoes. Geophys. Res. Lett. 2019, 46, 12520–12526. [Google Scholar] [CrossRef]
- Rigo, T.; Farnell Barqué, C. Evaluation of the Radar Echo Tops in Catalonia: Relationship with Severe Weather. Remote Sens. 2022, 14, 6265. [Google Scholar] [CrossRef]
- Guimond, S.R.; Heymsfield, G.M.; Turk, F.J. Multiscale observations of Hurricane Dennis (2005): The effects of hot towers on rapid intensification. J. Atmos. Sci. 2010, 67, 633–654. [Google Scholar] [CrossRef]
- Hoffmann, L.; Wu, X.; Alexander, M.J. Satellite observations of stratospheric gravity waves associated with the intensification of tropical cyclones. Geophys. Res. Lett. 2018, 45, 1692–1700. [Google Scholar] [CrossRef]
- Yang, S.; Tang, X.B.; Zhong, S.X.; Chen, B.; Zhou, Y.S.; Gao, S.T.; Wang, C.X. Convective bursts episode of the rapidly intensified Typhoon Mujigae. Adv. Atmos. Sci. 2019, 36, 541–556. [Google Scholar] [CrossRef]
- Zhuge, X.Y.; Ming, J.; Wang, Y. Reassessing the use of inner-core hot towers to predict tropical cyclone rapid intensification. Weather Forecast. 2015, 30, 1265–1279. [Google Scholar] [CrossRef]
- Sun, L.X.; Tang, X.D.; Zhuge, X.Y.; Tan, Z.M.; Fang, J. Diurnal Variation of Overshooting Tops in Typhoons Detected by Himawari-8 Satellite. Geophys. Res. Lett. 2021, 48, e2021GL095565. [Google Scholar] [CrossRef]
- Wright, J.S.; Sobel, A.H.; Schmidt, G.A. Influence of condensate evaporation on water vapor and its stable isotopes in a GCM. Geophys. Res. Lett. 2009, 36, L12804. [Google Scholar] [CrossRef]
- Sang, W.; Huang, Q.; Tian, W.; Wright, J.S.; Zhang, J.; Tian, H.; Luo, J.; Hu, D.; Han, Y. A large Eddy model study on the effect of overshooting convection on lower stratospheric water vapor. J. Geophys. Res. 2018, 123, 10023–10036. [Google Scholar] [CrossRef]
- Liu, C.; Zipser, E.J. Global distribution of convection penetrating the tropical tropopause. J. Geophys. Res. Atmos. 2005, 110, D23104. [Google Scholar] [CrossRef]
- Liu, N.; Liu, C. Global distribution of deep convection reaching tropopause in 1 year GPM observations. J. Geophys. Res. Atmos. 2016, 121, 3824–3842. [Google Scholar] [CrossRef]
- Liu, N.; Liu, C.; Hayden, L. Climatology and Detection of Overshooting Convection from 4 Years of GPM Precipitation Radar and Passive Microwave Observations. J. Geophys. Res. Atmos. 2020, 125, e2019JD032003. [Google Scholar] [CrossRef]
- Sun, L.X.; Zhuge, X.Y.; Wang, Y. A Contour-Based Algorithm for Automated Detection of Overshooting Tops Using Satellite Infrared Imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 497–508. [Google Scholar] [CrossRef]
- Hong, Y.; Nesbitt, S.W.; Trapp, R.J.; Di Girolamo, L. Near-global distributions of overshooting tops derived from Terra and Aqua MODIS observations. Atmos. Meas. Tech. 2023, 16, 1391–1406. [Google Scholar] [CrossRef]
- Schmetz, J.; Tjemkes, S.A.; Gube, M.; van de Berg, L. Monitoring deep convection and convective overshooting with Meteosat. Adv. Space Res. 1997, 19, 433–441. [Google Scholar] [CrossRef]
- Setvák, M.; Rabin, R.M.; Wang, P.K. Contribution of the MODIS instrument to observations of deep convective storms and stratospheric moisture detection in GOES and MSG imagery. Atmos. Res. 2007, 83, 505–518. [Google Scholar] [CrossRef]
- Bedka, K.M.; Dworak, R.; Brunner, J.; Feltz, W. Validation of Satellite-Based Objective Overshooting Cloud-Top Detection Methods Using CloudSat Cloud Profiling Radar Observations. J. Appl. Meteorol. Climatol. 2012, 51, 1811–1822. [Google Scholar] [CrossRef]
- Mikuš, P.; Mahović, N.S. Satellite-based overshooting top detection methods and an analysis of correlated weather conditions. Atmos. Res. 2013, 123, 268–280. [Google Scholar] [CrossRef]
- Jurković, P.M.; Mahovic, N.S.; Pocakal, D. Lightning, overshooting top and hail characteristics for strong convective storms in Central Europe. Atmos. Res. 2015, 161, 153–168. [Google Scholar] [CrossRef]
- Bedka, K.; Brunner, J.; Dworak, R.; Feltz, W.; Otkin, J.; Greenwald, T. Objective Satellite-Based Detection of Overshooting Tops Using Infrared Window Channel Brightness Temperature Gradients. J. Appl. Meteorol. Climatol. 2010, 49, 181–202. [Google Scholar] [CrossRef]
- Griffin, S.M.; Velden, C.S. Hazard Avoidance Products for Convectively-Induced Turbulence in Support of High-Altitude Global Hawk Aircraft Missions. Pure Appl. Geophys. 2019, 176, 2045–2055. [Google Scholar] [CrossRef]
- Monette, S.A.; Velden, C.S.; Griffin, K.S.; Rozoff, C.M. Examining Trends in Satellite-Detected Tropical Overshooting Tops as a Potential Predictor of Tropical Cyclone Rapid Intensification. J. Appl. Meteorol. Climatol. 2012, 51, 1917–1930. [Google Scholar] [CrossRef]
- Griffin, S.M. Climatology of Tropical Overshooting Tops in North Atlantic Tropical Cyclones. J. Appl. Meteorol. Climatol. 2017, 56, 1783–1796. [Google Scholar] [CrossRef]
- Sun, L.X.; Zhuge, X.Y.; Wang, Y. Favorable Environments for the Occurrence of Overshooting Tops in Tropical Cyclones. Adv. Atmos. Sci. 2017, 34, 532–544. [Google Scholar] [CrossRef]
- Proud, S.R. Analysis of overshooting top detections by Meteosat Second Generation: A 5-year dataset. Q. J. R. Meteorol. Soc. 2015, 141, 909–915. [Google Scholar] [CrossRef]
- Bedka, K.M.; Allen, J.T.; Punge, H.J.; Kunz, M.; Simanovic, D. A Long-Term Overshooting Convective Cloud-Top Detection Database over Australia Derived from MTSAT Japanese Advanced Meteorological Imager Observations. J. Appl. Meteorol. Climatol. 2018, 57, 937–951. [Google Scholar] [CrossRef]
- Bedka, K.M.; Khlopenkov, K. A Probabilistic Multispectral Pattern Recognition Method for Detection of Overshooting Cloud Tops Using Passive Satellite Imager Observations. J. Appl. Meteorol. Climatol. 2016, 55, 1983–2005. [Google Scholar] [CrossRef]
- Khlopenkov, K.V.; Bedka, K.M.; Cooney, J.W.; Itterly, K. Recent Advances in Detection of Overshooting Cloud Tops from Longwave Infrared Satellite Imagery. J. Geophys. Res. Atmos. 2021, 126, e2020JD034359. [Google Scholar] [CrossRef]
- Thiery, W.; Gudmundsson, L.; Bedka, K.M.; Semazzi, F.H.M.; Lhermitte, S.; Willems, P.; van Lipzig, N.P.M.; Seneviratne, S.I. Early warnings of hazardous storms over Lake Victoria. Environ. Res. Lett. 2017, 12, 074012. [Google Scholar] [CrossRef]
- Punge, H.J.; Bedka, K.M.; Kunz, M.; Werner, A. A new physically based stochastic event catalog for hail in Europe. Nat. Hazards 2014, 73, 1625–1645. [Google Scholar] [CrossRef]
- Thiery, W.; Davin, E.L.; Seneviratne, S.I.; Bedka, K.M.; Lhermitte, S.; van Lipzig, N. Hazardous thunderstorm intensification over Lake Victoria. Nat. Commun. 2016, 7, 12786. [Google Scholar] [CrossRef] [PubMed]
- Hourngir, D.; Panegrossi, G.; Casella, D.; Sanò, P.; D’Adderio, L.P.; Liu, C. A 4-Year Climatological Analysis Based on GPM Observations of Deep Convective Events in the Mediterranean Region. Remote Sens. 2021, 13, 1685. [Google Scholar] [CrossRef]
- Li, H.; Wei, X.; Min, M.; Li, B.; Nong, Z.; Chen, L. A Dataset of Overshooting Cloud Top from 12-Year CloudSat/CALIOP Joint Observations. Remote Sens. 2022, 14, 2417. [Google Scholar] [CrossRef]
- Bessho, K.; Date, K.; Hayashi, M.; Ikeda, A.; Imai, T.; Inoue, H.; Kumagai, Y.; Miyakawa, T.; Murata, H.; Ohno, T.; et al. An Introduction to Himawari-8/9—Japan’s New-Generation Geostationary Meteorological Satellites. J. Meteorol. Soc. Jpn. Ser. II 2016, 94, 151–183. [Google Scholar] [CrossRef]
- Yu, F.; Wu, X. Radiometric inter-calibration between Himawari-8 AHI and S-NPP VIIRS for the solar reflective bands. Remote Sens. 2016, 8, 165. [Google Scholar] [CrossRef]
- Zou, X.; Zhuge, X.; Weng, F. Characterization of Bias of Advanced Himawari Imager Infrared Observations from NWP Background Simulations Using CRTM and RTTOV. J. Atmos. Ocean. Technol. 2016, 33, 2553–2567. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Z.; Wei, C.; Lu, F.; Guo, Q. Introducing the New Generation of Chinese Geostationary Weather Satellites, Fengyun-4. Bull. Am. Meteorol. Soc. 2017, 98, 1637–1658. [Google Scholar] [CrossRef]
- Tang, F.; Zhuge, X.; Zeng, M.; Li, X.; Dong, P.; Han, Y. Applications of the Advanced Radiative Transfer Modeling System (ARMS) to Characterize the Performance of Fengyun-4A/AGRI. Remote Sens. 2021, 13, 3120. [Google Scholar] [CrossRef]
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The Global Precipitation Measurement Mission. Bull. Am. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Seto, S.; Iguchi, T.; Meneghini, R.; Awaka, J.; Kubota, T.; Masaki, T.; Takahashi, N. The Precipitation Rate Retrieval Algorithms for the GPM Dual-frequency Precipitation Radar. J. Meteorol. Soc. Jpn. Ser. II 2021, 99, 205–237. [Google Scholar] [CrossRef]
- Škerlak, B.; Sprenger, S.; Pfahl, M.; Tyrlis, E.; Wernli, H. Tropopause folds in ERA-Interim: Global climatology and relation to extreme weather events. J. Geophys. Res. Atmos. 2015, 120, 4860–4877. [Google Scholar] [CrossRef]
- Cooney, J.W.; Bowman, K.P.; Homeyer, C.R.; Fenske, T.M. Ten year analysis of tropopause-overshooting convection using GridRad data. J. Geophys. Res. Atmos. 2018, 123, 329–343. [Google Scholar] [CrossRef]
- Cooney, J.W.; Bedka, K.M.; Bowman, K.P.; Khlopenkov, K.V.; Itterly, K. Comparing Tropopause-Penetrating Convection Identifications Derived from NEXRAD and GOES Over the Contiguous United States. J. Geophys. Res. Atmos. 2021, 126, 1–23. [Google Scholar] [CrossRef]
- Trapp, R.J.; Marion, G.R.; Nesbitt, S.W. The Regulation of Tornado Intensity by Updraft Width. J. Atmos. Sci. 2017, 7, 4199–4211. [Google Scholar] [CrossRef]
- Griffin, S.M.; Bedka, K.M.; Velden, C.S. A Method for Calculating the Height of Overshooting Convective Cloud Tops Using Satellite-Based IR Imager and CloudSat Cloud Profiling Radar Observations. J. Appl. Meteorol. Climatol. 2016, 55, 479–491. [Google Scholar] [CrossRef]
- Jellis, D.; Bowman, K.P.; Rapp, A.D. Lifetimes of Overshooting Convective Events Using High-Frequency Gridded Radar Composites. Mon. Weather Rev. 2023, 151, 1979–1992. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| OT Detection Algorithm | H8 | FY4A | |||
|---|---|---|---|---|---|
| POD (%) | FAR (%) | POD (%) | FAR (%) | ||
| IRW-texture algorithm | B10 | 58.1 | 61.9 | 32.8 | 77.5 |
| B18 | 69.5 | 72.6 | 40.2 | 80.2 | |
| IR contour-based algorithm | BTD = −3.6 K (benchmark) | 62.1 | 36.6 | 32.2 | 65.6 |
| BTD = −1 K | 29.3 | 14.7 | 27.6 | 67.4 | |
| BTD = −2 K | 44.3 | 23.4 | 29.3 | 66.5 | |
| BTD = −3 K | 55.8 | 31.4 | 31.0 | 64.7 | |
| BTD = −4 K | 66.1 | 39.6 | 32.8 | 67.6 | |
| BTD = −5 K | 69.5 | 48.3 | 35.1 | 69.0 | |
| BTD = −6 K | 71.8 | 57.8 | 36.8 | 70.1 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Zhuge, X.; Zhu, S. Geostationary Satellite-Based Overshooting Top Detections and Their Relationship to Severe Weather over Eastern China. Remote Sens. 2024, 16, 2015. https://doi.org/10.3390/rs16112015
Sun L, Zhuge X, Zhu S. Geostationary Satellite-Based Overshooting Top Detections and Their Relationship to Severe Weather over Eastern China. Remote Sensing. 2024; 16(11):2015. https://doi.org/10.3390/rs16112015
Chicago/Turabian StyleSun, Liangxiao, Xiaoyong Zhuge, and Shihua Zhu. 2024. "Geostationary Satellite-Based Overshooting Top Detections and Their Relationship to Severe Weather over Eastern China" Remote Sensing 16, no. 11: 2015. https://doi.org/10.3390/rs16112015
APA StyleSun, L., Zhuge, X., & Zhu, S. (2024). Geostationary Satellite-Based Overshooting Top Detections and Their Relationship to Severe Weather over Eastern China. Remote Sensing, 16(11), 2015. https://doi.org/10.3390/rs16112015